基于TinyML的貓咪動作識別方法
2024-11-03 00:00:00劉軼群劉思進王慧
科技資訊 2024年19期
摘要:針對國內寵物用品市場產品功能單一的問題,設計了一款可以識別貓咪奔跑、跳躍、翻轉3種運動狀態的設備。借助開源電子平臺Arduino,使用陀螺儀和加速度傳感器對貓咪的運動狀態數據進行采集,并使用深度學習框架TensorFlow進行訓練,通過微型機器學習(TinyMachineLearning,TinyML)技術壓縮模型參數,使模型部署到開發板上。通過試錯法找到訓練效果最佳的模型結構,最終實現對貓咪運動狀態識別的準確率達到90%以上。
關鍵詞:微型機器學習運動狀態識別模型搭建模型訓練
CatactionrecognitionmethodbasedonTinyML
LIUYiqunLIUSijinWANGHui
(HubeiUniversityofTechnology,SchoolofElectricalandElectronicEngineering,Wuhan,HubeiProvince,430068China)
Abstract:NowthepetproductmarketisdevelopingsorapidlyinChina,butmostproductshavelimitedfunctionality.Thispaperdesignsadevicethatcanidentifythethreemotionstatesofrunning,jumpingandflippingofacatbasedontheArduino,whichcansolvetheproblemofasinglefunctionoftheproductsonthemarket.Finally,theaccuracyratereachedmorethan90%bythemostsuitablenetworkstructurethroughtrialanderror.
Keyword:TinyML;actionrecognition;Modelbuilding;Modeltraining
根據“亞寵院”發布的《寵物行業藍皮書》[1],未來五年內我國貓的數量將超過1.1億只,寵物用品市場規模近年增長率穩定在10%以上,有91%的養寵人計劃購買智能寵物用品。國外產品可收集寵物生理信息并分析其健康狀況,國內產品主要實現定位、追蹤等單一功能,具備極大的提升空間,市場前景廣闊[2]。本文將微型機器學習(TinyMachineLearning,TinyML)應用到貓咪項圈中,通過采集貓咪運動數據進而識別其動作類型。
1.總體方案設計
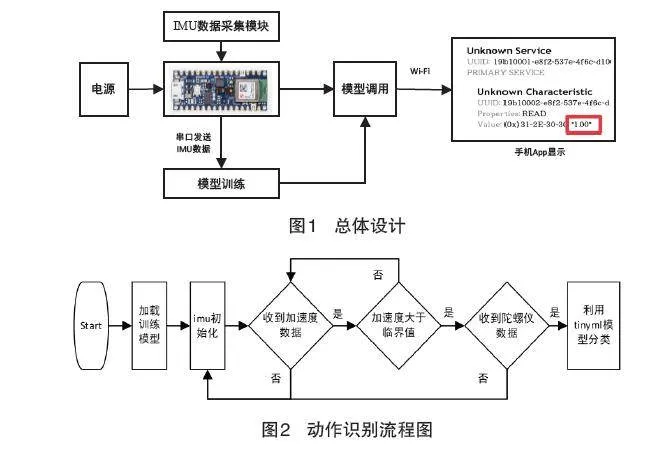
本系統以Arduino開發板為核心設計出一款貓咪動作識別系統,可對貓咪跳躍、奔跑、翻轉三類動作進行識別和分類,系統總體框架如圖1所示。
1.1運動數據采集和識別
本方案選用Arduino開發板,性能強大,兼容性好[3]。開發版尺寸較小,可減少對貓的壓迫感,通過九軸重力傳感器可采集貓咪運動時的加速度和位移信息。對IMU數據采集程序,僅需在初始化后讀取加速度和陀螺儀數值即可。對動作識別分類程序,則需設置加速度閾值,保證貓咪動作幅度較大時才調用識別函數,以免造成誤判,并降低CPU工作強度。動作識別流程如圖2所示。
1.2模型搭建
訓練前對數據進行歸一化處理并打上標簽,劃分80%作為訓練集,20%作為驗證集,輸出層個數為3。訓練時更改FC(FullyConnectedlayer)數量及每一層神經元個數來搭建不同的網絡結構,網絡激活函數均使用“relu”,優化器均使用“RMSProp”。結構一FC層數為1,節點個數為30,即神經網絡拓撲結構為30∶3;同理,結構二為50∶15∶3,結構三為50∶30∶15∶3。此外,由于功耗和內存限制,訓練后的模型文件還需進行輕量化處理[4]。
2.實驗分析
2.1模型訓練
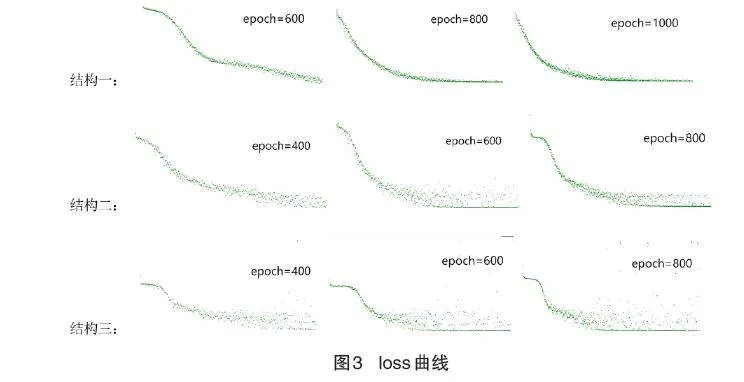
將設備固定于實驗貓脖頸處,引導貓咪完成行走、翻轉、跳躍的動作。設置模型結構,更改訓練輪次,開始迭代訓練。如圖3所示,結構一訓練600輪時并未見loss曲線明顯收斂,在800輪后已無明顯收斂趨勢;結構二訓練600輪時loss曲線收斂,但800輪時曲線有發散趨勢;結構三訓練600輪時曲線收斂效果較好。因此,結構一訓練800輪,二訓練600輪,三訓練600輪。生成模型后調用各類方法完成輕量化處理,使文件大小小于1MB。
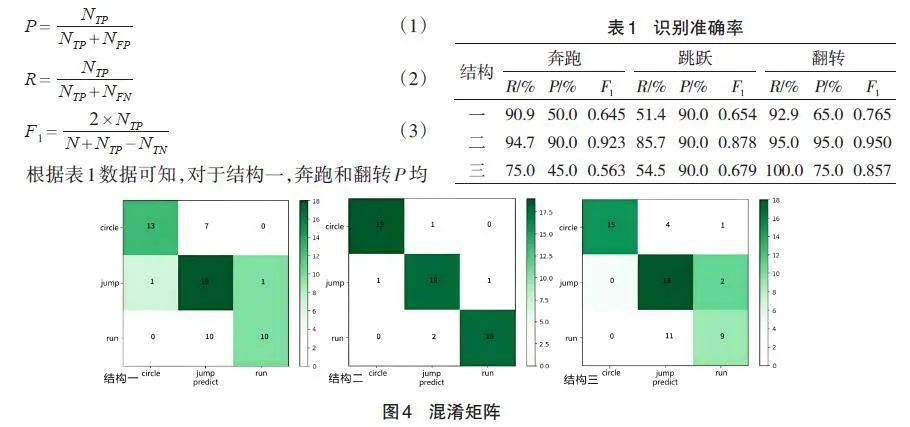
2.2識別結果統計與分析
如表1所示,對于結構一,奔跑和翻轉P均低于70%,由于貓咪奔跑和翻轉時重心出現小幅上移,如果特征提取效果較差,只找到局部最優解,容易將三類動作相混淆[5];對于結構三,奔跑P僅為45%,翻轉R雖達到100%,但P僅為75%,如果模型對單個特征過于敏感,可能根據重心小幅上移這一特征將該動作誤判為跳躍。而結構二的3類動作P均高于90%,且跳躍R顯著高于結構一和三,達到85.7%。
3.結語
本設備可識別貓咪奔跑、跳躍、翻轉三種運動狀態,準確率高達到90%,但泛化性和魯棒性不ancZPNsQd09dGVg0LhDyNQ==足。后續考慮使用更多網絡模型結構,改進運動檢測方式,解決貓咪多樣性運動數據的采集和增廣問題。
參考文獻
- 亞寵研究院.寵物行業藍皮書:2023寵物行業發展報告(簡版)[R/OL].(2023-08-15)[2024-03-25].https://www.petslib.cn/report/537876963235201024.html.
- 何泫臻,范志聰,李孜,等.寵物健康智能監測發展現狀[J].廣東飼料,2023,32(10):8-14.
- KITZHABERZB,ENGLISHCM,SANIMKRI,etal.FluorometercontrolandreadoutusinganArduinoNano33BLEsenseboard.[J].Appliedspectroscopy,2022,77(2):37028221128800-37028221128800.
- 劉旭瑤,曾天凱,戴嘉慶,等.基于TinyML輕量化邊緣側處理的智能分類垃圾桶[J].裝備制造技術,2022(6):110-113.
- SACHINN,NEERAJS.Astandalonecomputingsystemtoclassifyhumanfootmovementsusingmachinelearningtechniquesforankle-footprosthesiscontrol.[J].ComputerMethodsinBiomechanicsandBiomedicalEngineering,2021,25(12):11-11.