基于無人機影像聚類分析的海綿城市下墊面模塊化方法研究
2024-11-03 00:00:00林仙秀
科技資訊 2024年19期
摘要:下墊面模塊化生成方法是海綿城市規(guī)劃中的關鍵技術之一,研究建立基于無人機影像聚類分析技術的模塊化自動生成模型。首先,基于海綿城市無人機影像,搭建了改進的層次聚類模型(GHNG模型),其中包括水平生長及垂直生長機制,實現(xiàn)對城市下墊面無人機影像進行模塊化智能識別,并輸出模塊聚類結(jié)果;其次,結(jié)合福州鶴林片區(qū)海綿城市規(guī)劃中測量數(shù)據(jù),對該區(qū)域不同類型下墊面進行實例驗證。實驗結(jié)果表明:自適應GHNG模型和算法可以很好地對海綿城市規(guī)劃過程中不同類型下墊面進行智能識別,進一步驗證了自適應GHNG模型在城市下墊面模塊化自動生成中具有可靠性、準確性、魯棒性。
關鍵詞:測繪數(shù)據(jù)下墊面聚類模型模塊化
中圖分類號:TU992;TU985.12
ResearchonModularizationMethodofSpongeCityunderlyingSurfacebasedonClusterAnalysisofUnmannedAerialVehicleImages
LINXianxiu
FuzhouSurveyInstituteCo.,Ltd.,F(xiàn)uzhou,F(xiàn)ujianProvince,350108China
Abstract:Thegenerationmethodofunderlyingsurfaceisoneofthekeytechnologiesinspongecityplanning.Thestudy,aautomaticgenerationmodelbasedontheclusteringanalysistechnologyofunmannedaerialvehicleimagesisestablished.Firstly,basedonthespongecityunmannedaerialvehicleimages,anadaptivehierarchicalclusteringmodel(GHNGmodel)isestablished,whichincludesthehorizontalgrowthandverticalgrowthmechanism,torealizethemodularintelligentrecognitionoftheurbanunderlyingsurfaceunmannedaerialvehicleimages,andoutputthemodularclusteringresults;Then,basedonthesurveyingdatainthespongecityplanningofFuzhouHelinarea,thedifferenttypesofunderlyingsurfacesintheareaareverifiedbyanexample.TheresultshowsthattheadaptiveGHNGmodelandalgorithminthispapercanintelligentlyidentifydifferenttypesofunderlyingsurfacesintheprocessofspongecityplanning,andfurtherverifythereliability,accuracyandrobustnessoftheadaptiveGHNGmodelinthemodularautomaticgenerationofurbanunderlyingsurfaces.
Keywords:Surveyingandmappingdata;Underlyingsurface;Clusteringmodel;Modularization
海綿城市是一種創(chuàng)新型城市規(guī)劃理念,其設計理念將城市轉(zhuǎn)變?yōu)橐粋€類似海綿的結(jié)構(gòu),旨在通過整合自然和人工系統(tǒng),最大程度地減少城市的洪澇風險,改善水質(zhì),提升生態(tài)系統(tǒng)的健康狀況,在適應環(huán)境變化和應對自然災害等方面具有良好的“彈性”,提高城市生態(tài)可持續(xù)性[1]。海綿城市包括河、湖、池塘等水系和相應的城市配套設施[2],建設需要綜合考慮城市規(guī)劃、景觀設計、工程建設等多個領域的因素,并通過合理的土地利用和綠色基礎設施的建設,實現(xiàn)城市的可持續(xù)發(fā)展目標。因此,海綿城市在降雨時實現(xiàn)吸水、蓄水、滲水和凈水功能,并在需要時釋放并利用蓄存的水資源。該系統(tǒng)使雨水在城市中能夠自由遷移,有效提升城市排水系統(tǒng)的水準,有力緩解城市內(nèi)澇問題的壓力[3]。
- 材料與方法
1.1數(shù)據(jù)來源
本文采用2023年所拍攝的福州市鶴林片區(qū)無人機影像,實驗區(qū)位于119°19′14.66"~119°22′2.65"E,26°4′34.66"~26°6′52.30"N。2023年8月上旬進行航拍作業(yè),無人機拍攝高度約150m,低空拍攝,航拍時天氣晴朗、無風且無云霧,空間分辨率為0.05m。無人機所拍攝的影像不受大氣因素影響,按實際情況正常使用。2023年鶴林片區(qū)海綿城市建設工程1∶500數(shù)字線劃圖。
1.2&nup031C+y9icjnEfRReLlyvHs/EMzHS265ii46YnzxbY=bsp;數(shù)據(jù)處理
1.2.1下墊面類型劃分
按照海綿城市建設工程下墊面分類體系,結(jié)合1∶500數(shù)字線劃圖,將實驗區(qū)的下墊面類型劃分為屋面、一般路面、一般草地、水體、廣場(不滲水)、廣場(滲水)、樹林、裸土。
1.2.2下墊面矢量數(shù)據(jù)
利用制圖軟件將實驗區(qū)1∶500數(shù)字線劃圖進行多邊形構(gòu)面,形成面數(shù)據(jù),按照下墊面類型劃分標準對其進行賦值。利用GIS軟件將賦值后的面數(shù)據(jù)進行拓撲修正,得到下墊面矢量數(shù)據(jù)(驗證數(shù)據(jù))。
1.2.3實驗區(qū)范圍
以2023年鶴林片區(qū)海綿城市建設工程1∶500數(shù)字線劃圖所測量范圍作為實驗區(qū)范圍,本文將下墊面矢量數(shù)據(jù)進行融合,形成實驗區(qū)范圍。
1.2.4無人機影像處理
首先將獲取的無人機影像經(jīng)過正射糾正、拼接等數(shù)據(jù)處理,其次對無人機影像進行投影轉(zhuǎn)換,與1∶500數(shù)字線劃圖保持相同坐標系統(tǒng),最后按照實驗區(qū)范圍對無人機影像進行裁剪,得到實驗區(qū)的數(shù)字正射影像。
1.2.5建立解譯標志
根據(jù)實驗區(qū)下墊面劃分類型,結(jié)合數(shù)字正射影像的色調(diào)、色彩、大小、紋理、形狀等地物特征,建立下墊面各類型的解譯標志,為聚類分析提供分類參考。
1.3基于聚類的下墊面模塊化生成模型
1.3.1GHNG聚類理論
基于生長神經(jīng)氣的層次聚類模型(GrowingHierarchicalNeuralGas,GHNG)是一種啟發(fā)式神經(jīng)網(wǎng)絡樹模型[4],其各層神經(jīng)元處理的輸入受到前一層神經(jīng)元的影響。劉天松等人[5]提出了一種基于啟發(fā)式神經(jīng)氣的數(shù)據(jù)奇異性監(jiān)測模型,該模型能夠?qū)崟r展現(xiàn)數(shù)據(jù)實例的動態(tài)聚類結(jié)果。通過對鋁電解過程數(shù)據(jù)進行監(jiān)測實例驗證,證明該模型和算法具有更強的奇異性監(jiān)測能力,能夠準確、有效地監(jiān)測和控制鋁電解工藝過程。
GHNG層次聚類模型具有自適應性機制、節(jié)點生成和淘汰機制等特性。然而,在神經(jīng)元適應性機制中的學習系數(shù)通常設置為固定值;節(jié)點淘汰機制中,GHNG神經(jīng)網(wǎng)絡拓撲結(jié)構(gòu)中老化節(jié)點和邊緣節(jié)點也無法實時被更新和刪除[5]。
1.3.2自適應GHNG神經(jīng)網(wǎng)絡模型
在自適應GHNG神經(jīng)網(wǎng)絡模型中,通過具體應用數(shù)據(jù)的不斷調(diào)整和更新學習系數(shù)。此外,在水平和垂直生長機制中采用類似算法,實時進行生長檢驗和自適應誤差調(diào)整。采用不同顏色分層用于數(shù)據(jù)聚類結(jié)果顯示,以便區(qū)分應用數(shù)據(jù)之間的差異。同理,子代節(jié)點在其父代所屬的簇內(nèi)進行拓撲結(jié)構(gòu)的自適應調(diào)整,以生成獲勝節(jié)點,從而分析數(shù)據(jù)特性。該神經(jīng)網(wǎng)絡繼承了GHNG生長機制還擁有K-means的聚類效果。
在啟發(fā)式GHNG神經(jīng)網(wǎng)絡中,獲勝節(jié)點的誤差是指其領域所有數(shù)據(jù)點的距離的總和。每當新數(shù)據(jù)點被輸入時,GHNG神經(jīng)網(wǎng)絡會遍歷所有節(jié)點,實時更新獲勝節(jié)點,并計算該節(jié)點的局部誤差,其計算方式如下[5]:
借助自適應權值系數(shù)對獲勝節(jié)點及其鄰域節(jié)點進行參數(shù)權重調(diào)整,其權值系數(shù)的更新方法定義如下:
根據(jù)式(2)獲得的自適應權值系數(shù)實時更新獲勝節(jié)點及其鄰域節(jié)點權重,權重計算定義如下:
式(1)、式(2)、式(3)中,α表示GHNG神經(jīng)網(wǎng)絡權值系數(shù);表示網(wǎng)絡獲勝節(jié)點誤差(次獲勝節(jié)點誤差相同);表示網(wǎng)絡中獲勝節(jié)點的誤差總和,根據(jù)自適應權值系數(shù)α對相關節(jié)點的權值進行調(diào)整;WS表示獲勝節(jié)點權重及鄰域節(jié)點權重。
將新獲勝節(jié)點插入當前獲勝節(jié)點與其鄰域獲勝節(jié)點之間的方法包括以下幾個步驟。
第一步:當前迭代步數(shù)是定義參數(shù)λ的整數(shù)倍時,即可插入一個新的獲勝節(jié)點;
第二步:遍歷網(wǎng)絡中節(jié)點誤差,獲得最大獲勝節(jié)點誤差,同時計算其鄰域節(jié)點最大誤差,建立一個網(wǎng)絡新節(jié)點(新獲勝節(jié)點),使網(wǎng)絡新獲勝節(jié)點位置介于最大獲勝節(jié)點和最大誤差鄰域節(jié)點之間,確定新獲勝節(jié)點具體位置計算定義如下:
第三步:新的獲勝節(jié)點被插入后,最大誤差獲勝節(jié)點與新獲勝節(jié)點、最大誤差鄰域節(jié)點與新獲勝節(jié)點會重新鏈接形成新的網(wǎng)絡拓撲。在網(wǎng)絡模型中,拓撲結(jié)構(gòu)的更新檢驗被定義為:
式(5)中,a和b表示隨機參數(shù)(通常設為正值)。為促使GHNG神經(jīng)網(wǎng)絡拓撲結(jié)構(gòu)中全局誤差系數(shù)最小化,其全局誤差定義如下:
第四步:在網(wǎng)絡垂直生長機制中,利用水平生長機制中存儲的獲勝節(jié)點進行縱向衍生,即以這些獲勝節(jié)點為中心,并以類似算法生成新的拓撲結(jié)構(gòu)。
在GHNG層次聚類算法中,通過以上步驟(水平和垂直生長),由于新的數(shù)據(jù)不斷加入,形成了一個實時連續(xù)調(diào)整的過程,網(wǎng)絡神經(jīng)元的數(shù)量不斷增加,同時這水平和垂直生長機制相互關聯(lián)并相互約束:在垂直生長機制中,網(wǎng)絡上一層神經(jīng)節(jié)點被稱為一個“父”代,而水平生長機制中,其拓撲結(jié)構(gòu)類似于垂直生長機制中的“父”與代“子”代神經(jīng)元。
2實例驗證
2.1數(shù)字正射影像與模型參數(shù)
本文以福州鶴林片區(qū)數(shù)字正射影像為基礎,驗證GHNG聚類模型對下墊面類型識別的有效性和可行性。
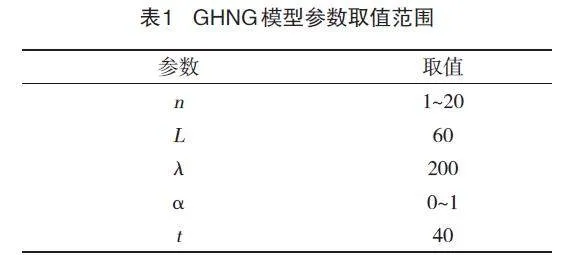
自適應GHNG神經(jīng)網(wǎng)絡是無監(jiān)督數(shù)據(jù)聚類方法,其僅依賴于實際應用數(shù)據(jù)分布特征。自適應GHNG魯棒性較強。其經(jīng)過水平和垂直生長機制形成影像之間的拓撲結(jié)構(gòu),最終影像數(shù)據(jù)特征被提取和聚類。在網(wǎng)絡分層聚類中,聚類結(jié)果以垂直生長機制中第一層獲勝節(jié)點為聚類中心進行劃分,本文GHNG模型參數(shù)取值及范圍如表1所示。
2.2聚類結(jié)果與下墊面生成結(jié)果
城市化建設中城市下墊面的特性由于增加不同的功能形成不同的下墊面,城市的產(chǎn)匯流與城市下墊面特性息息相關,城市的產(chǎn)匯流特性也隨之變化,通常表現(xiàn)為地表徑流量大幅增加和匯流速度明顯加快。不同下墊面類型的徑流系數(shù)差別較大。通過下墊面數(shù)據(jù)分析,解析下墊面種類及其分布情況,有助于更為準確地模擬城市地表的產(chǎn)匯流,從而提升排水防澇模型的模擬精度。
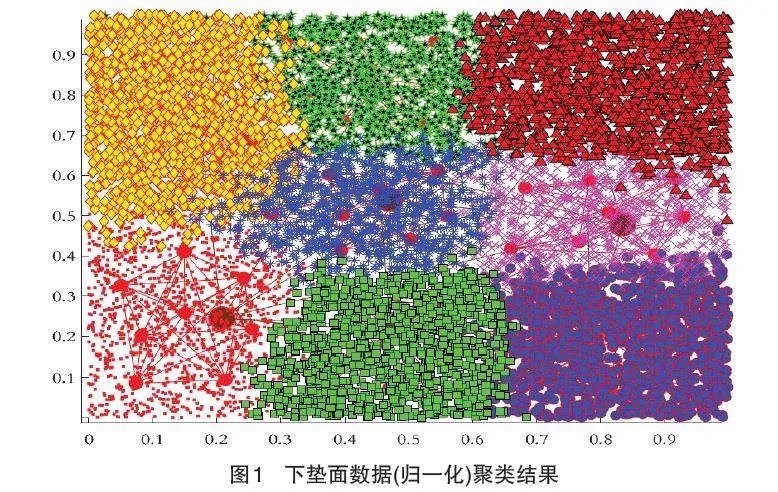
通過自適應GHNG神經(jīng)網(wǎng)絡模型對福州市鶴林片區(qū)數(shù)字正射影像進行聚類分析,將相鄰同類圖斑合并,形成下墊面分類結(jié)果。為獲得更精確的聚類結(jié)果,將下墊面數(shù)據(jù)歸一化,通過建立的模型獲得八類聚類結(jié)果,如圖1所示。同時,根據(jù)建立的下墊面各類型解譯標志對聚類結(jié)果進行精準分類標識,并將其進行矢量化,通過要素綜合,進一步生成福州市鶴林片區(qū)下墊面分類結(jié)果。
2.3精度驗證
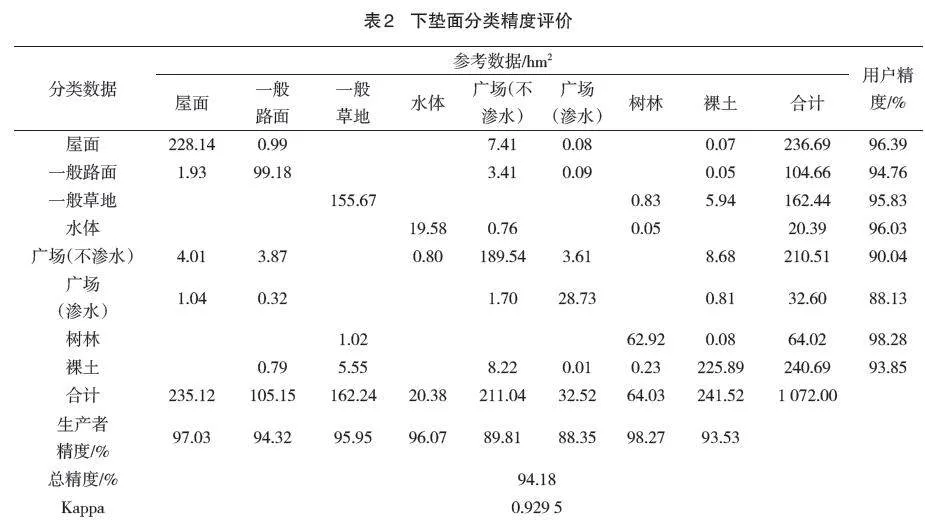
為了評價實驗區(qū)下墊面提取的精度,以下墊面矢量數(shù)據(jù)為參考數(shù)據(jù),通過混淆矩陣的方式對分類結(jié)果進行分析,得到分類精度評價表如表2所示。根據(jù)表2可知,分類總體精度達到94.18%,kappa系數(shù)為0.9295,生產(chǎn)者精度和用戶精度在88.13%~98.28%之間,提取精度較高。基于實驗區(qū)的分類精度驗證結(jié)果,認為生成的模塊化下墊面符合實際,進一步驗證了層析聚類模型的精確性、有效性和實用性。
3結(jié)語
在海綿城市規(guī)劃中,針對領域經(jīng)驗和人工識別城市下墊面效率低、準確度不高等問題,基于福州鶴林片區(qū)實驗數(shù)據(jù),提出了一種基于自適應聚類(GHNG)學習模型,建立自適應權值系數(shù)、鄰域誤差更新、節(jié)點平均距離的節(jié)點生成機制,并且在城市下墊面模塊化生成中驗證該模型和算法的有效性和可行性。實驗結(jié)果表明,本文建立的城市下墊面自動識別結(jié)果是有效可行的,在海綿城市建設過程中為管理者/決策者提供理論和決策支持。
參考文獻
[1] 姜建成,錢振明,陳一,等.中國式現(xiàn)代化江蘇新實踐蘇州樣本(筆談)[J].蘇州大學學報(哲學社會科學版),2023,44(5):1-23.
[2] 王維奇,劉晨暉,陳延菲,等.公園城市目標下城市公園綠地開放共享理念的核心要義和科學路徑[J].風景園林,2023,30(11):28-34.
[3] 郭渠,王勇,李瑞,等.三峽庫區(qū)局地風特征分析[J].氣象與環(huán)境學報,2023,39(3):97-105.
[4] 柯澳,王宇聰,胡博宇,等.基于圖像的野生動物檢測與識別綜述[J].計算機系統(tǒng)應用,2024,33(1):22-36.
[5] 劉天松,吳永明,李少波,等.基于自適應GHNG的鋁電解過程奇異性數(shù)據(jù)監(jiān)測方法[J].計算機集成制造系統(tǒng),2023,29(11):3614-3623.