下肢外骨骼機器人輔助下康復訓練對腦梗死后偏癱患者步態參數和平衡能力的影響
2024-11-05 00:00:00汪樓袁鳴
現代醫學與健康研究電子雜志 2024年20期
【摘要】目的 探討采用下肢外骨骼機器人輔助下康復訓練對腦梗死偏癱患者的臨床效果,為提高腦梗死偏癱患者的康復效果提供參考依據。方法 選取南京市高淳人民醫院2023年1月至2024年3月收治的60例腦梗死后偏癱患者,根據隨機數字表法將其分為兩組,對照組(30例,接受常規康復訓練)和觀察組(30例,接受下肢外骨骼機器人輔助下康復訓練)。兩組患者均干預2個月。觀察比較兩組患者干預后臨床療效,干預前后運動功能、平衡能力、步態參數、運動誘發電位(MEP)潛伏期、中樞運動傳導時間(CMCT)變化。結果 觀察組臨床療效高于對照組;與干預前比,干預后兩組患者Fugl-Meyer運動功能量表(FMA)、Berg平衡量表(BBS)評分及步頻、步速均升高,且觀察組均較對照組更高;支撐相和擺動相時長及MEP潛伏期、CMCT均縮短,觀察組均較對照組更短(均P<0.05)。結論 腦梗死后偏癱患者康復訓練下輔助應用下肢外骨骼機器人可改善步態參數,進而優化平衡功能,且可縮短MEP和CMCT水平,綜合提高下肢運動功能。
【關鍵詞】腦梗死 ; 偏癱 ; 下肢外骨骼機器人 ; 康復訓練 ; 步態參數 ; 平衡能力
【中圖分類號】R742.3 【文獻標識碼】A 【文章編號】2096-3718.2024.20.0071.04
DOI:10.3969/j.issn.2096-3718.2024.20.023
偏癱是腦卒中主要后遺癥,亦是患者肢體運動功能障礙的主要表現,會增加跌倒和骨折的發生率。因此,患者需長期接受康復訓練。常規康復中,康復師可根據患者的病情進展及時調整康復內容,使其更具有針對性,并且在康復師的指導下,可保障康復內容的正確進行,但腦梗死病情復雜,偏癱患者康復難度大、周期長[1]。為提高腦卒中術后康復的有效性,近年來,臨床中機器人的應用越來越多。下肢外骨骼機器人可根據特定參數輔助患者運動,彌補傳統康復訓練中康復師技能水平和疲勞程度的差異,通過高質量重復訓練進一步強化康復訓練,協助患者以較低的心率、較少的消耗進行長時間的訓練,并且該機器人可預測患者的運動意圖,有助于提高患者運動耐力和治療依從性,同時下肢外骨骼機器人可在提高訓練效果的同時降低危險性[2]。基于此,本研究旨在探討腦梗死后偏癱患者在康復訓練中接受下肢外骨骼機器人輔助的效果,現報道如下。
1 資料與方法
1.1 一般資料 選取南京市高淳人民醫院2023年1月至2024年3月收治的60例腦梗死后偏癱患者,根據隨機數字表法將其分為對照組(30例)和觀察組(30例)。對照組患者中男性24例,女性6例;年齡50~73歲,平均(61.25±2.86)歲;偏癱部位:左側14例,右側
16例。觀察組患者中男性21例,女性9例;年齡
52~71歲,平均(60.95±2.99)歲;偏癱部位:左側
16例,右側14例。兩組患者一般資料比較,差異無統計學意義(P>0.05),組間可比。納入標準:⑴符合《中國急性缺血性腦卒中診治指南2018》[3]中腦梗死后偏癱的相關診斷標準;⑵均為首次發病;⑶意識、認知、交流無障礙;⑷心肺功能良好,可耐受既定康復計劃。排除標準:⑴合并其他下肢疾病;⑵下肢外科手術急性期;⑶下肢長度不足70 cm。本研究符合《赫爾辛基宣言》中的相關倫理要求,且患者及家屬均已簽署知情同意書。
1.2 康復方法 對照組采用常規康復訓練。⑴體位抗痙攣訓練:指導患者以良肢位為基點進行訓練,患者取坐位時,指導其平放雙足,腳尖向前,膝蓋呈90°,雙上肢放于體前;患者取患側位時,避免患側肢受壓,將患腿屈曲,并于腿下墊一枕頭,囑其髖關節自然屈曲。患者更換體位時,訓練方式亦更換,訓練時長與體位時長一致;⑵牽張訓練:指導并協助患者取仰臥位,雙下肢盡力伸直,康復師位于患者身側,握住患側足跟,前臂掌側抵住足Vb4DO6zMJYh6PByV25B6xw==底,身體前傾,帶動前臂使患足被動屈曲至最大范圍,到位后停頓5~8 s后緩緩復原,15~20次/組,20 min/組,
3次/d;⑶踝背屈誘發訓練:指導患者取仰臥位或坐位,康復師握拳,食指近端指關節凸向外側形成尖峰,拇指抵住遠端食指節背面,用食指節尖峰叩擊患者外踝、足跟、第二和第五跖趾關節各點連線區域內,誘發踝外翻背屈反射,發現反射后,康復師指導患者主動屈曲踝背,每次誘發踝背屈后休息5 s,5 min/次,1次/d;⑷功率自行車訓練:輔助患者坐于功率自行車上,雙下肢置于踏板上,由一名康復師站在患側幫助患者下肢擺動,防止患者屈髖屈膝時發生髖關節外旋,確保下肢在正常角度下與健側肢交替運動,15~20 min/次,1次/d;⑸靜態平衡訓練:指導患者直立于動靜態平衡訓練儀上,上肢自然下垂。若患者參與靜態訓練,儀器根據患者身高和體質量等參數調整顯示器高度和傾斜度,患者通過視覺反饋調整中心,從而使得指示光移動至目的光圈內,20 min/次,5次/周。⑹改良站立位重心轉移:患者彎曲健側肢膝關節,足部平放于訓練凳,盡力伸直膝關節,足尖前頂,康復師采用膝關節頂患者患側膝關節,雙手維持患者的軀干和骨盆處于直立狀態,指導患者逐漸遷移重心至患側。患者維持數秒(具體以疾病發展和恢復情況為主)后,指導患者將重心遷移至中立位,10 min/組,1組/d。⑺核心肌群:指導患者平臥,雙下肢屈曲,雙腳平放至床面,盡力抬臀和腰部,使身體保持一條直線,維持5 s,30 min/次,1次/d。觀察組采用下肢外骨骼機器人輔助下康復訓練。在對照組的基礎上加用下肢外骨骼康復機器人(北京大艾機器人科技有限公司,型號:AiWalker-C-II)輔助訓練。每次訓練前檢查機器人,確保機器無故障。機器人訓練模式包括肢體屈伸、踏步和行走等,均包括主被動和健側輔助等形式。若患者偏癱側下肢不可運動,可設置參數(抬腳高度:3~20 cm,單步時間:2~5 s,單步長0~45 cm)后,給予患者被動屈伸和被動行走的康復訓練模式。若患者偏癱側下肢肌力為1~2級,可采用健側輔助模式,用健側肢的運動頻率,帶動患者肢體運動。機器人根據健側肢的頻率自動調整模式,帶動患者患側肢運動。若患者的患側肢肌力>2級,采用主動模式。當患者佩戴機器人,外骨骼機器人可通過健側肢運動頻率,并調整參數。運動頻率通常為30 min/次,2次/d。訓練初期以患者耐受為宜,逐漸提高頻率和時間。兩組患者均干預
2個月。
1.3 觀察指標 ⑴臨床療效。采用改良Ashworth痙攣量表(MAS)[4]評估,干預后MAS等級降至0級,或等級降低≥2級,則為顯效;干預后MAS等級降低1級,則為有效;干預后MAS等級無變化,則為無效。⑵運動功能和平衡能力。分別于干預前后采用Fugl-Meyer運動功能量表(FMA)[5]評估兩組患者偏癱側下肢運動功能,下肢FMA評分包括17項,采用3級評分法,分值為
0~2分,總分為34分,分數和患者的下肢功能呈正相關;采用Berg平衡量表(BBS)[6]評估患者平衡功能,該量表包括14個項目,采用5級評分法,分值為0~4分,總分為56分,分數和患者的平衡功能成正相關。⑶步態參數。分別于干預前后者采用步態監測評估與訓練系統(大連乾函科技有限公司,遼械注準20212190105,型號:
QH-JBE-Y)記錄兩組患者偏癱側肢的支撐相和擺動相時長,采用10米步行測試[7]記錄患者以自然步速步行10 m的步頻、步速,重復檢測3次取平均值。⑷神經傳導功能。分別于干預前后采用磁場刺激儀(武漢依瑞德醫療設備新技術有限公司,型號:YRD CCY- Ⅰ)檢測。指導患者采取坐位,保持放松,將記錄電極粘貼在脛骨前肌表面皮膚,將刺激線圈置于下肢對應的大腦皮質運動區進行刺激,從受試者患側大腦皮質M1區刺激開始,至患側脛骨前肌復合動作電位出現的時間,選擇5個重復性好的波形時間并計算均值,記為運動誘發電位(MEP)潛伏期;于受試者患側C7棘突旁采用磁刺激,記錄從刺激開始至MEP出現的5個重復性較好的波形時間,計算其均值,記為中樞運動傳導時間(CMCT)。
1.4 統計學方法 采用SPSS 20.0統計學軟件分析數據,計數資料以[例(%)]表示,采用χ2檢驗,等級資料采用秩和檢驗;計量資料經S-W檢驗符合正態分布,以( x ±s)表示,組間比較采用獨立樣本t檢驗,干預前后比較采用配對t檢驗。P<0.05為差異有統計學意義。
2 結果
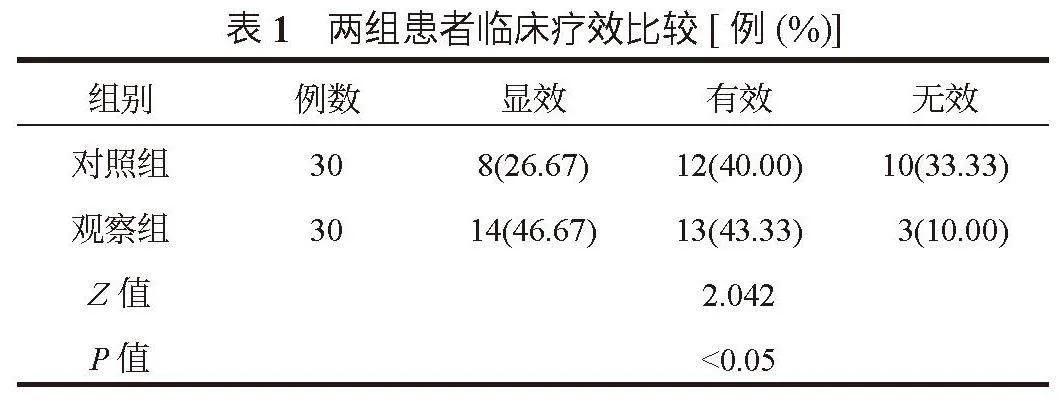
2.1 兩組患者臨床療效比較 觀察組臨床療效高于對照組,差異有統計學意義(P<0.05),見表1。
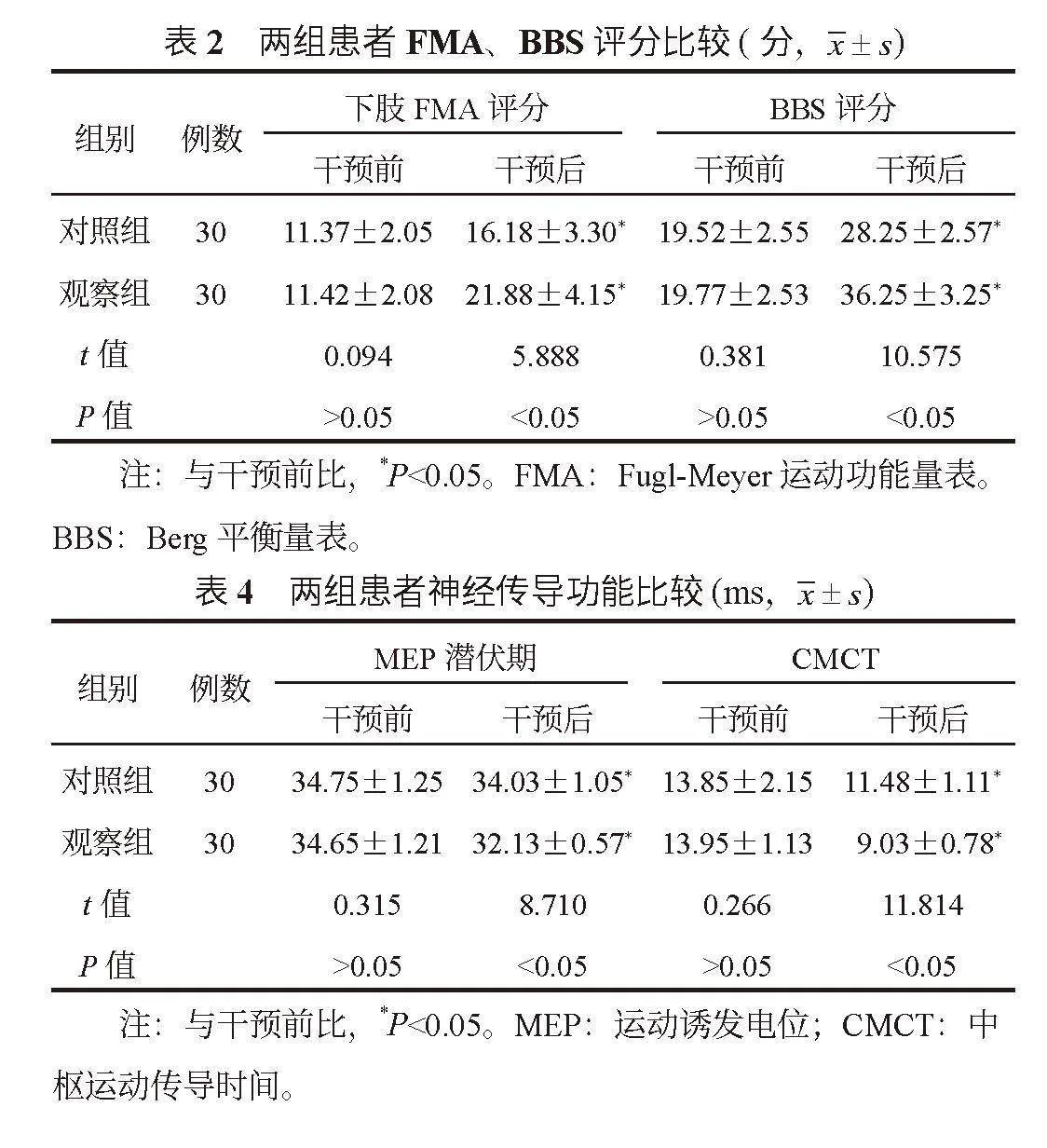
2.2 兩組患者FMA、BBS評分比較 與干預前比,干預后兩組患者下肢FMA、BBS評分均升高,且觀察組均較對照組更高,差異均有統計學意義(均P<0.05),見表2。
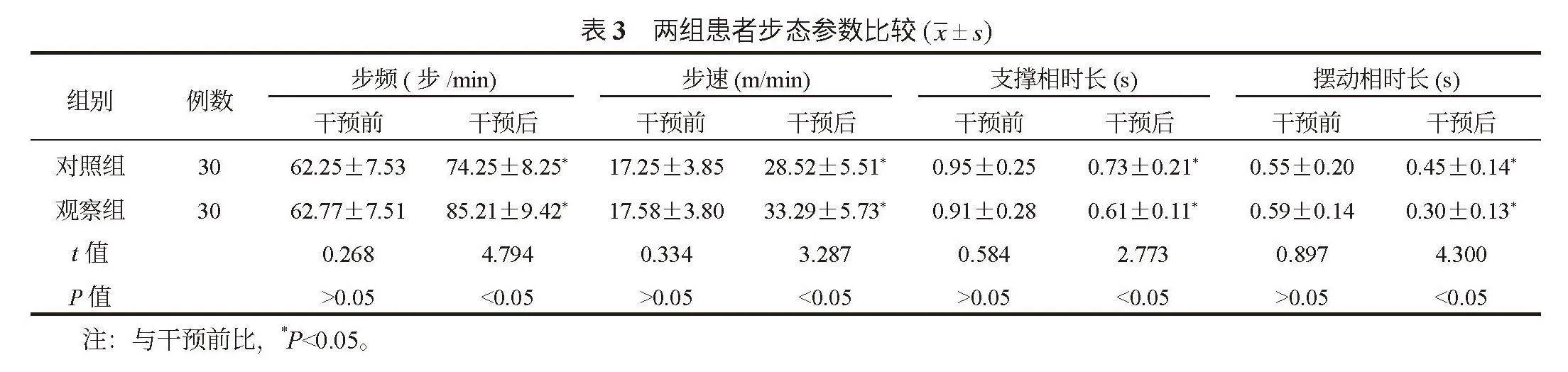
2.3 兩組患者步態參數比較 與干預前比,干預后兩組患者的步頻、步速均升高,觀察組均較對照組更高,支撐相和擺動相時長均縮短,觀察組均較對照組更短,差異均有統計學意義(均P<0.05),見表3。
2.4 兩組患者神經傳導功能比較 與干預前比,干預后兩組患者MEP潛伏期、CMCT均縮短,且觀察組均較對照組更短,差異均有統計學意義(均P<0.05),見表4。
3 討論
常規康復訓練可基于人體生理結構和偏癱發生機制選擇適合的康復訓練,從而針對性地提高患者運動功能,但常規康復存在康復師經驗或精力匱乏造成康復指導不到位,患者依從性低等弊端[8]。作為醫工合作新技術,下肢外骨骼機器人包含了傳感、控制和仿生學等多個學科,在老齡化加劇和腦卒中發生率不斷上升的情況下,為外骨骼機器人輔助偏癱患者康復質量提供理論和實踐依據極有必要。
本研究結果顯示,干預后觀察組臨床療效及下肢FMA、BBS評分均高于對照組,這提示外骨骼機器人輔助康復可進一步提升患者治療效果,強化下肢運動功能和平衡功能。下肢外骨骼機器人可通過重復性、漸進性的長時間練習,從而促使患者的神經網絡恢復,因為高效的運動控制而發生可塑性變化,幫助患者學習和儲存正確的運動模式,促進運動功能恢復,還可激活肌肉骨骼和下肢神經,輸入正確的感覺反饋,這有助于改善突觸和腦功能,提高運動的協調性和穩定性,強化患者的平衡功能,進而增強療效[9]。本研究結果顯示,干預后觀察組患者的步頻、步速均較對照組更高,支撐相和擺動相時長均較對照組更短,這提示下肢外骨骼機器人可進一步改善患者的步態,糾正支撐相和擺動相的異常。分析其原因為,下肢外骨骼機器人可基于人體下肢的生物力學和解剖結構,高重復性地以正常步行姿勢進行步態訓練,患者在借助機器人訓練時,可被動地減少健側支撐相時長,減少患側擺動相,促使擺動相和支撐相時長縮短,使得步態處于對稱狀態。規律性的運動可強化患者下肢肌肉,使得患者運動過程中,足跟落地時肌肉可充分收縮發力,縮小患側支撐相,增加步速和步頻[10]。本研究結果顯示,干預后觀察組患者MEP潛伏期、CMCT均對照組更短,這提示下肢外骨骼機器人可修復患者的運動誘發電位,改善皮質運動的興奮性。外骨骼機器人輔助下康復訓練中,錐體系統會將運動皮質反復興奮傳遞至脊髓前角運動神經元,長此以往可形成自動印跡,是后續自動活動恢復的基礎;機器人訓練可避免康復師體力不足,人工康復精度不高等問題,以此來提高康復質量,促進受損的中樞傳導通路再通,即神經網絡已在大量的規律性運動訓練中發生適應性改變,基于腦可塑性,外骨骼機器人可促進神經再支配并對中樞產生正向反饋,改善患者皮質運動興奮性,縮短MEP潛伏期和CMCT。
綜上,腦梗死后偏癱患者采用下肢外骨骼機器人進行輔助康復訓練,有助于促進運動功能恢復,改善下肢痙攣狀態,縮短MET潛伏期和CMCT,且可改善患者步態參數,提高平衡功能,值得臨床推廣應用。
參考文獻
薛淇, 徐瑞澤, 劉暢, 等. 柔性外骨骼機器人聯合常規康復治療改善腦卒中偏癱步態的1例報告[J]. 中國康復醫學雜志, 2024, 39(3): 432-435.
張明路, 鐘道方, 田穎, 等. 穿戴式下肢外骨骼機器人研究現狀[J]. 科學技術與工程, 2021, 21(19): 7856-7862.
中華醫學會神經病學分會, 中華醫學會神經病學分會腦血管病學組, 彭斌, 等. 中國急性缺血性腦卒中診治指南2018[J]. 中華神經科雜志, 2018, 51(9): 666-682.
郭鐵成, 衛小梅, 陳小紅. 改良Ashworth量表用于痙攣評定的信度研究[J]. 中國康復醫學雜志, 2008, 23(10): 906-909.
畢勝, 紀樹榮, 顧越. Fugl-Meyer上肢運動功能評分與上肢運動功能狀態評分的響應性研究[J]. 中國康復醫學雜志, 2016, 21(2): 118-120.
趙宏, 甕長水, 高麗萍. 用Berg平衡量表和最大步行速度評價腦卒中患者的戶外步行自立性[J]. 中國康復理論與實踐, 2010, 16(1): 8-10.
劉靜. 經顱磁刺激神經調控治療在運動發育遲緩患兒增強核心肌群力量中的應用效果及10MWT結果研究[J]. 齊齊哈爾醫學院學報, 2020, 41(10): 1192-1195.
丁雯, 齊敬東. 八段錦聯合常規康復訓練對老年腦卒中偏癱患者平衡功能、肢體運動功能的影響[J]. 現代診斷與治療, 2024, 35(6): 904-906.
龍建軍,王玉龍,王同,等.下肢外骨骼康復機器人對偏癱患者步態參數的影響[J].中國康復醫學雜志, 2021, 36(9): 1107-1110, 1117.
卜玉環. 腦卒中偏癱患者運動功能及生活質量應用早期康復護理研究進展[J]. 中華災害救援醫學, 2024, 11(3): 337-340.
作者簡介:汪樓,大學本科,主管技師,研究方向:神經運動康復。
通信作者:袁鳴,大學本科,主治醫師,研究方向:神經康復。E-mail:592744766@qq.com