丘陵山地小型履帶式動力底盤設(shè)計(jì)與試驗(yàn)
2024-11-05 00:00:00蔡羽晨高巧明羅悅洋糜澤榮李宗鵬呂攀
廣西科技大學(xué)學(xué)報 2024年4期







摘 要:針對廣西丘陵山地經(jīng)濟(jì)作物種植區(qū)非結(jié)構(gòu)化的地形以及多種作物種類多的復(fù)雜生長環(huán)境,設(shè)計(jì)了一款具有高靈活性、可以適應(yīng)丘陵山地地形的小型履帶式動力底盤。以履帶式底盤作為研究對象,建立履帶式底盤機(jī)器人坡面行走模型,研究其在爬坡時的穩(wěn)定性與通過性,并在此基礎(chǔ)上提出履帶式底盤設(shè)計(jì)方案與參數(shù)選取。基于ANSYS Workbench對機(jī)架進(jìn)行受力分析,機(jī)架最大位移變形量為0.094 8 mm,最大等效應(yīng)力為35.611 MPa,滿足強(qiáng)度使用要求。利用RecurDyn動力學(xué)仿真軟件對履帶式底盤進(jìn)行虛擬建模,分析其在爬坡、轉(zhuǎn)向過程中的質(zhì)心與扭矩變化情況,驗(yàn)證了方案的可行性。田間試驗(yàn)結(jié)果表明,履帶式底盤機(jī)器人在水泥平地直線行駛速度為6.11 km/h,最小轉(zhuǎn)彎半徑為403.0 mm,草地最大爬坡角度為38°,最大越障高度為170 mm,作業(yè)期間,履帶式底盤運(yùn)行平穩(wěn)。本文設(shè)計(jì)的履帶式底盤的各項(xiàng)參數(shù)能夠滿足整機(jī)設(shè)計(jì)的要求,具有良好的爬坡越障性能,作業(yè)指標(biāo)達(dá)到了相關(guān)標(biāo)準(zhǔn)要求,研究成果可為丘陵山地履帶式底盤的設(shè)計(jì)與研發(fā)提供參考。
關(guān)鍵詞:丘陵山地;履帶式底盤;農(nóng)業(yè)機(jī)械;RecurDyn
中圖分類號:S220.32;TH122 DOI:10.16375/j.cnki.cn45-1395/t.2024.04.003
0 引言
從地形特征角度看,山地和丘陵是廣西的主要地形,也是廣西重要的經(jīng)濟(jì)作物種植區(qū)[1-2]。近年來,國家大力發(fā)展農(nóng)業(yè)機(jī)械,重點(diǎn)開發(fā)適用于丘陵山地適度規(guī)模化種養(yǎng)殖的輕簡型、智能化、復(fù)式農(nóng)機(jī)農(nóng)具。目前,丘陵山地農(nóng)機(jī)動力底盤按照移動方式可分為履帶式、輪式、足式和復(fù)合式[3],其中,履帶式具有結(jié)構(gòu)緊湊、承載能力強(qiáng)等特點(diǎn),更適用于丘陵山區(qū)農(nóng)用機(jī)械。劉平義等[4]設(shè)計(jì)了一種采用Y型可調(diào)懸架作為調(diào)平機(jī)構(gòu)的農(nóng)用車輛預(yù)檢測主動調(diào)平底盤。曾俊豪等[5]設(shè)計(jì)了一款除草底盤結(jié)構(gòu),對底盤的轉(zhuǎn)向性能、穩(wěn)定性能和越障性能進(jìn)行了分析。劉九慶等[6]結(jié)合轉(zhuǎn)向阻力矩、土壤下陷阻力和履帶接地面壓力分布情況等參數(shù)建立了履帶式底盤轉(zhuǎn)向性能模型。Chajkin等[7]建立鉸接履帶車輛底盤橫向穩(wěn)定性計(jì)算的數(shù)學(xué)模型,對鉸接履帶車輛橫向穩(wěn)定性進(jìn)行了研究。Dudzinski等[8]針對履帶式底盤能效優(yōu)化,建立了履帶底架內(nèi)部阻力模型。可見,國內(nèi)外對履帶式底盤也有了不少的研究,但廣西丘陵山地地形復(fù)雜多樣,假如直接使用國內(nèi)外現(xiàn)有的成熟產(chǎn)品,還存在很多制約因素。
針對廣西丘陵山地經(jīng)濟(jì)作物種植園區(qū)非結(jié)構(gòu)化的地形特點(diǎn),本文采用模塊化的設(shè)計(jì)方法,設(shè)計(jì)一種小型履帶式動力底盤,并基于虛擬樣機(jī)技術(shù),借助ANSYS Workbench軟件對機(jī)架進(jìn)行分析,利用RecurDyn軟件對履帶式底盤爬坡與轉(zhuǎn)向進(jìn)行仿真,完成樣機(jī)試制,驗(yàn)證設(shè)計(jì)方案的可行性,為丘陵山地等局部方位內(nèi)作業(yè)空間小的機(jī)械化問題與裝備提供參考。
1 整體方案設(shè)計(jì)
1.1 整機(jī)系統(tǒng)布置
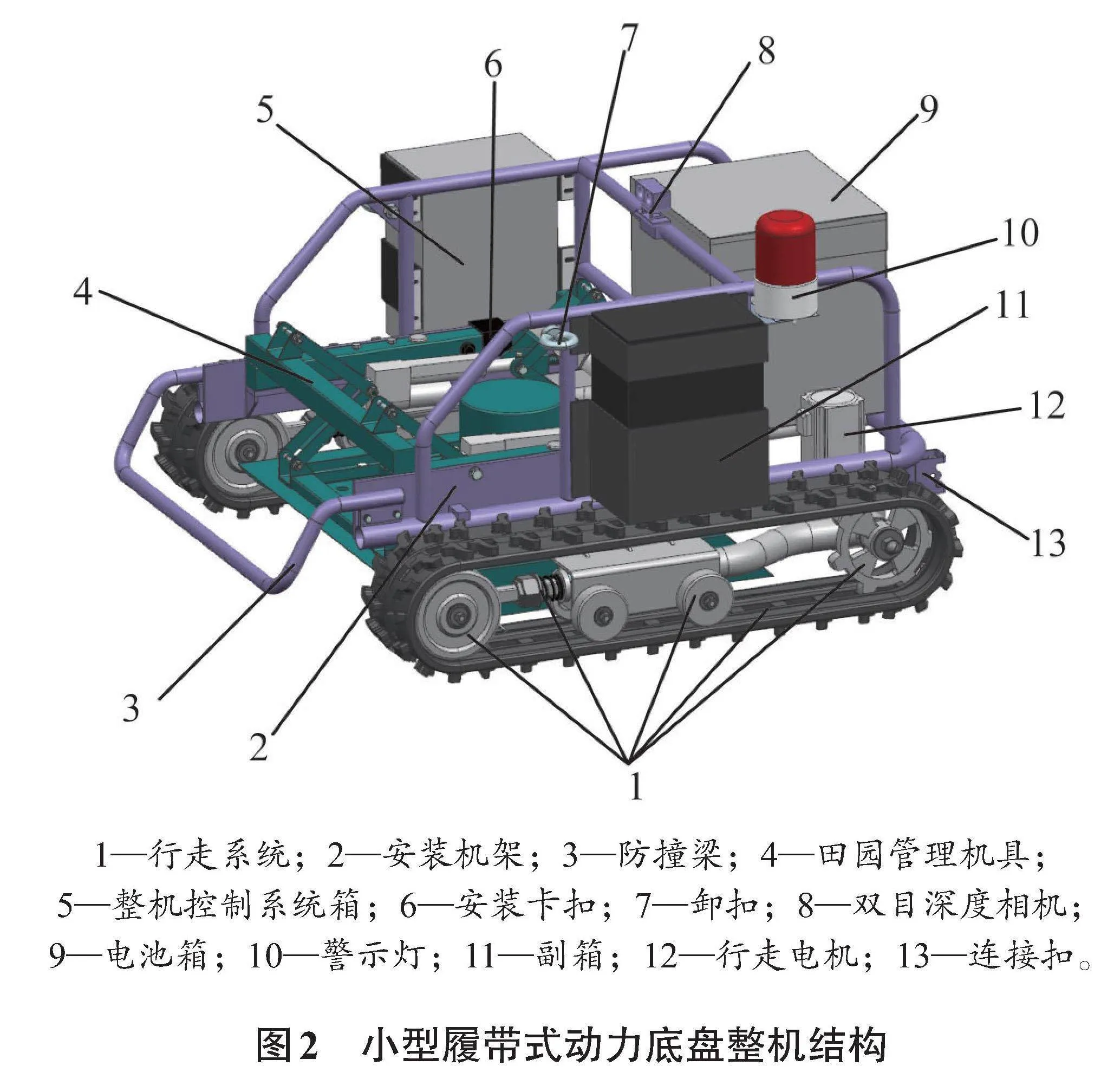
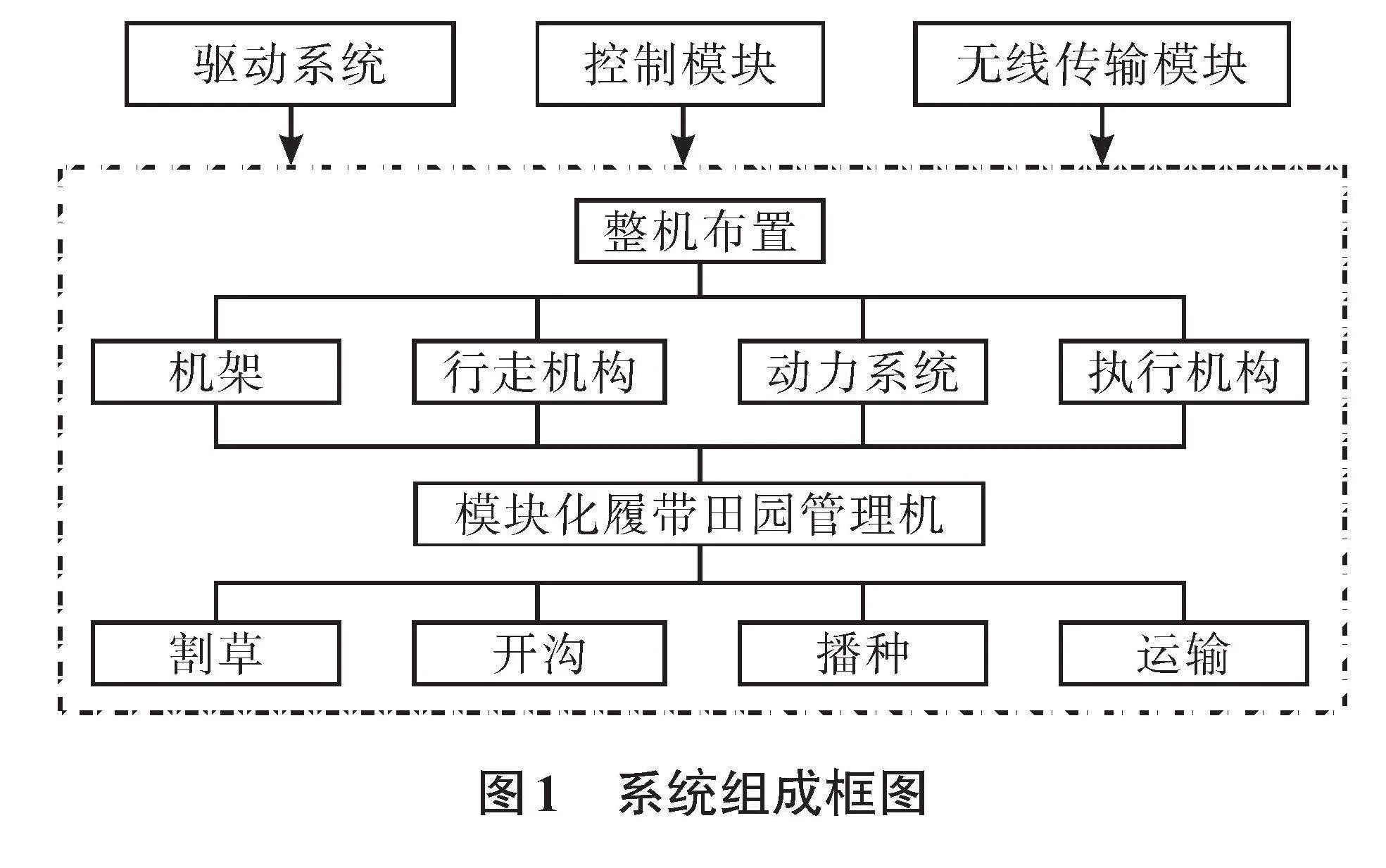
小型模塊化履帶式動力底盤主要由機(jī)架、行走系統(tǒng)、無線傳輸模塊、控制模塊以及相關(guān)配件組成。機(jī)架上安裝模塊化田園管理機(jī)具,如切割裝置、施肥裝置、貨箱等,能夠?qū)崿F(xiàn)割草、開溝、播種、運(yùn)輸?shù)裙δ堋O到y(tǒng)組成如圖1所示。
小型履帶式動力底盤結(jié)構(gòu)組成三維圖如圖2所示,動力系統(tǒng)采用雙電機(jī)驅(qū)動,通過調(diào)節(jié)兩側(cè)履帶驅(qū)動電機(jī)的轉(zhuǎn)速大小,實(shí)現(xiàn)機(jī)器不同運(yùn)動狀態(tài)的調(diào)整[9-10];履帶機(jī)構(gòu)構(gòu)型采用“一字型”布置,主要部件包括承重輪、驅(qū)動鏈輪、張緊輪與張緊裝置等。整機(jī)前中部放置模塊化田園管理機(jī)具,后部放置動力電池與電池管理系統(tǒng)。
小型模塊化履帶式底盤總體技術(shù)參數(shù)如表1所示。
1.2 底盤通過性分析
丘陵山地種植田園地形起伏較大,作業(yè)環(huán)境復(fù)雜,對履帶式底盤的坡地通過性能提出了較高要求。其中,坡地越障高度與最大跨越壕溝寬度是評價履帶式底盤通過性的重要指標(biāo)[11]。為研究履帶式底盤所能翻越障礙物的最c9889a1154d8d47b45a34c623d3defd8大高度與跨越壕溝的最大寬度,建立履帶式底盤理想狀態(tài)下的越障與跨越壕溝模型,如圖3所示,其中,Lb為履帶接地長度,單位為m;a、b分別為質(zhì)心位置與前后承重輪的距離,單位為m;C為質(zhì)心位置;hC為重心到地面的垂直高度,單位為m;Md為驅(qū)動鏈輪扭矩,單位為N·m;rd為驅(qū)動鏈輪半徑,單位為m;FN為臺階頂角對履帶的支撐力,單位為N;rb為承重輪半徑,單位為m;rt為張緊輪半徑,單位為m;G為豎直向下的重力,單位為N;ρ為履帶式底盤受臺階頂起時的仰角,單位為(°);Hb為跨越臺階垂直高度,單位為m;θh為坡面角度,單位為(°);Wmax為跨越壕溝的最大寬度,單位為m。
1.2.1 坡地越障高度
縱向傾翻穩(wěn)定角影響了履帶在坡地跨越障礙物的最大高度。當(dāng)履帶式底盤處于臨界平衡狀態(tài)時,
[FNLb2-hCtan ρ+hC-rtGsin ρ-Lb2Gcos ρ]=0. (1)
當(dāng)支撐力[FN=0]時,履帶式底盤達(dá)到極限仰角:
[ρ=arctanLb2hC-rd]. (2)
此時臺階高度[Hb]與設(shè)計(jì)的整機(jī)結(jié)構(gòu)參數(shù)之間存在以下關(guān)系:
[HbhC=Lb2+rdtan ρ2-hCtan ρ?sin ρ] .(3)
在理論上,履帶式底盤的最大越障高度不會超過履帶張緊輪的半徑。綜上,履帶式底盤能夠跨越的障礙物高度為:
[Hb,max=minHb,rt]. (4)
代入本機(jī)參數(shù)計(jì)算,去除覆帶厚度后,得到最大越障高度為150 mm。
1.2.2 坡地最大跨越壕溝寬度
最大跨越壕溝寬度[Wmax]與設(shè)計(jì)的整機(jī)結(jié)構(gòu)參數(shù)之間存在以下關(guān)系,
[Wmax=mina+hCtanθh,b-hCtanθh]. (5)
履帶式底盤所能跨過的最大壕溝寬度受其整機(jī)的重心位置和所在坡地的坡度角影響,且不超過履帶接地長度的一半。
代入本機(jī)參數(shù)計(jì)算,得到最大跨越壕溝寬度為350 mm。
2 小型底盤坡面穩(wěn)定性分析
履帶式底盤機(jī)器人行走時,能否保持穩(wěn)定是履帶式機(jī)器人作業(yè)的關(guān)鍵性能之一[12]。履帶式底盤在坡地上不隨意滑動或者翻倒,保持在一個穩(wěn)定的狀態(tài)的性能叫做穩(wěn)定性,分為橫向穩(wěn)定性、縱向穩(wěn)定性和滑移穩(wěn)定性。本節(jié)建立履帶式底盤的坡地穩(wěn)定性模型,研究其坡面穩(wěn)定性能。
2.1 坡面橫向穩(wěn)定性
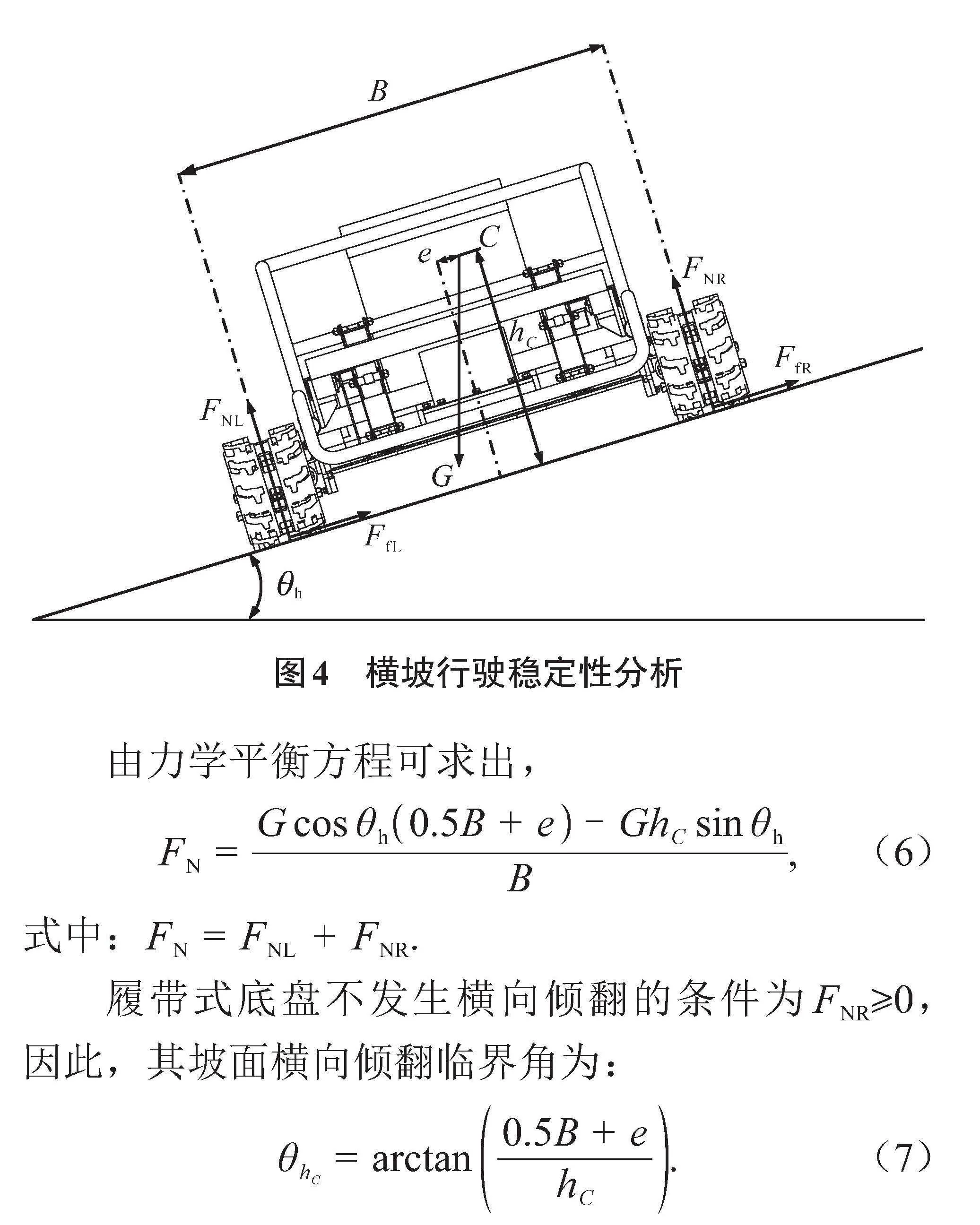
履帶式底盤機(jī)器人在山地坡面上橫向行走時,受到的作用力有左右兩側(cè)履帶的支撐力[FNL]、[FNR],地面的附著力[FfL]、[FfR],豎直向下的重力[G],根據(jù)受力條件建立如圖4所示的橫坡行走理論模型,其中,B為左右兩側(cè)履帶之間的軌距;e為重心橫向偏移距離。如果此時坡面角度正好為履帶式底盤的橫向傾翻臨界角度,右側(cè)履帶的地面支撐力則為[FNR=0]。
由力學(xué)平衡方程可求出,
[FN=Gcosθh0.5B+e-GhCsinθhB], (6)
式中:[FN=FNL+FNR].
履帶式底盤不發(fā)生橫向傾翻的條件為[FNR]≥0,因此,其坡面橫向傾翻臨界角為:
[θhC=arctan0.5B+ehC]. (7)
要求所設(shè)計(jì)的坡面橫向傾翻臨界角≥35°,而重心橫向偏移距離為影響其坡面橫向穩(wěn)定角的顯著因素。同時,由于實(shí)際作業(yè)中整機(jī)的布置使重心的位置產(chǎn)生偏差,會對其坡面橫向極限傾翻穩(wěn)定角產(chǎn)生影響。
因此,當(dāng)實(shí)際安裝機(jī)具時,要適當(dāng)降低重心高度,并使重心位置盡可能接近理論位置處。
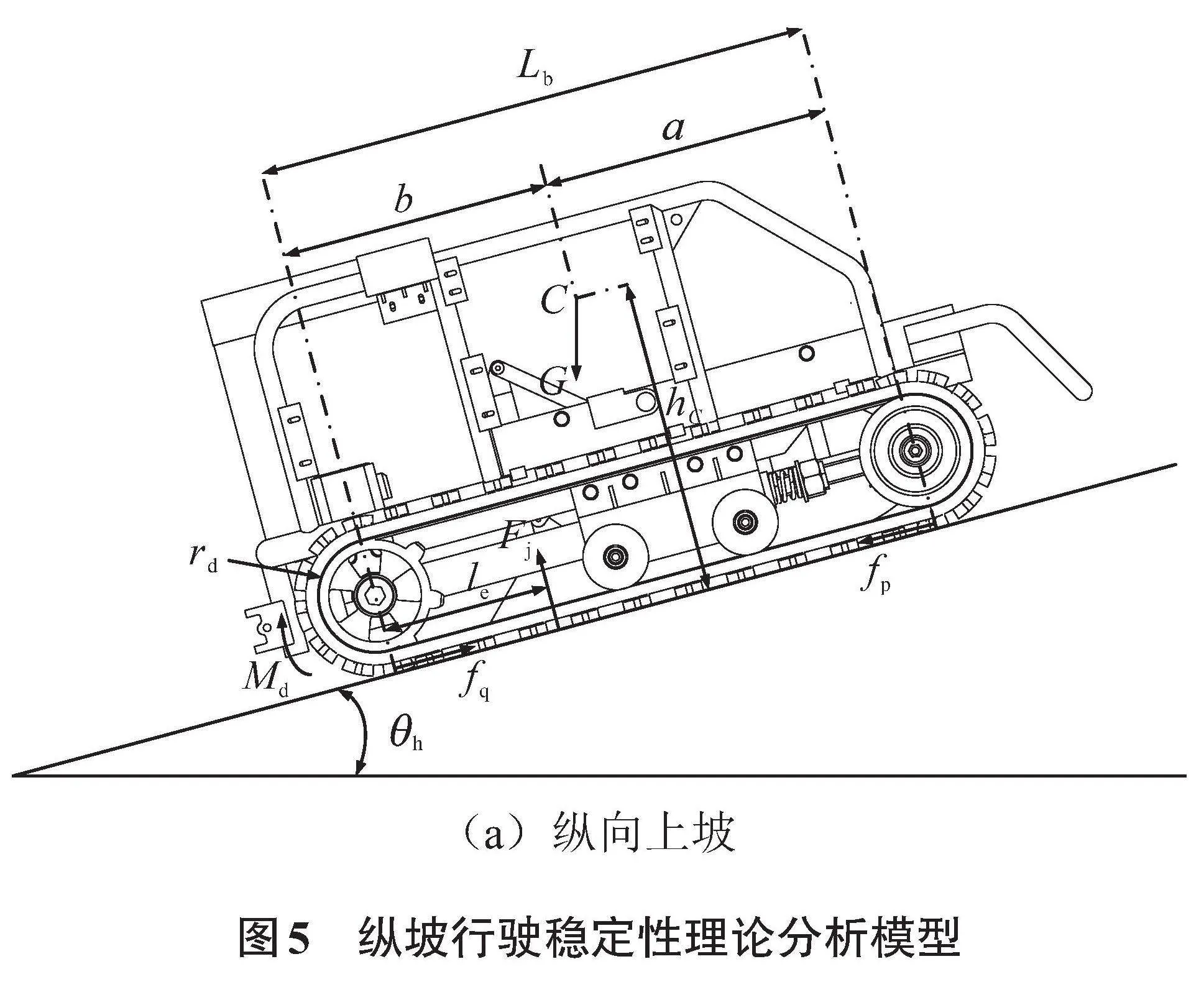
2.2 坡面縱向穩(wěn)定性
履帶式底盤的坡面縱向穩(wěn)定性能分為履帶式底盤縱向上坡和縱向下坡2種情況[13]。根據(jù)履帶式底盤機(jī)器人爬坡時受到的力(履帶接觸面受地面均布荷載的集中力[Fj]、牽引力[fq],行走阻力fp)及地面支撐力與履帶支撐面旋轉(zhuǎn)邊緣的距離(le),建立如圖5所示的縱向爬坡理論模型。
研究縱向爬坡情況,如圖5(a)所示,建立受力平衡方程:
[Gcosθh=Fj,F(xiàn)jle-Gbcosθh+GhCsinθh=0.] (8)
在履帶式機(jī)器人縱向爬坡的工況下,[le≥0]時整機(jī)不發(fā)生傾翻,此時履帶式底盤爬坡時的傾翻穩(wěn)定角為
[θhd=arctanbhC]. (9)
如圖5(b)所示,履帶式機(jī)器人在縱向下坡時:
[Gcosθh=Fj,F(xiàn)jle+GhCsinθh-Gacosθh=0.] (10)
縱向下坡的極限傾翻穩(wěn)定角:
[θhd=arctanahC]. (11)
在實(shí)際工況下,履帶式底盤的重心并不在理論重心處,受到整機(jī)布置的影響,存在一定的偏移量,所以履帶式底盤的縱向極限傾翻穩(wěn)定角應(yīng)為其2種工況下極限傾翻穩(wěn)定角的最小值,即
[θhd=minθhd, θhd]. (12)
由理論計(jì)算可知,在實(shí)際作業(yè)中,整機(jī)重心離地面越低越不容易發(fā)生傾翻。因此,在實(shí)際安裝機(jī)具時,要適當(dāng)降低重心高度,并使重心位置盡可能接近理論位置處。
2.3 坡面滑移穩(wěn)定性
坡面滑移穩(wěn)定性是指履帶式底盤機(jī)器人能平穩(wěn)停靠在坡面上而不會下滑的能力,其在坡面靜止而不產(chǎn)生滑移的條件為
[Ff=μsGcosθh≤Gsinθh,] (13)
式中:[Ff]為履帶與地面的摩擦阻力;[μs]為履帶與地面的附著系數(shù)。
履帶式底盤機(jī)器人穩(wěn)定地停在坡面上不產(chǎn)生滑移的最大坡度角為:
[θh≤arctanμs]. (14)
3 履帶機(jī)構(gòu)方案設(shè)計(jì)
3.1 電動機(jī)選取
所設(shè)計(jì)的履帶式動力底盤機(jī)器人適用于丘陵山地,作業(yè)工況主要為平地和爬坡,其行駛阻力包括運(yùn)行阻力、坡道阻力、轉(zhuǎn)向阻力和內(nèi)部阻力等。對履帶式底盤在不同工況下所需的牽引力進(jìn)行分析可知,坡地起步時其所需牽引力最大[14],此工況下所需的牽引力為
[FT=λdcosθh+sinθh+0.03+amg,] (15)
式中:[FT]為履帶式底盤所需牽引力,單位為N;[λd]為運(yùn)行阻力系數(shù),由試驗(yàn)確定;m為履帶式底盤整備質(zhì)量,單位為kg;g為重力加速度,取9.8 N/kg;[a∈0.01, 0.02]。
單側(cè)驅(qū)動電機(jī)所需功率為
[P≥FTvm2ηx], (16)
式中:[P]為驅(qū)動電機(jī)額定功率,單位為kW;[vm]為履帶式底盤機(jī)器人行走速度,單位為m/s;[ηx]為行星減速器效率,取0.9。
驅(qū)動電機(jī)所需額定轉(zhuǎn)速為
[n=vmi2πr×60], (17)
式中:[n]為驅(qū)動電機(jī)額定轉(zhuǎn)速,單位為r/min;[i]為行星減速器傳動比,綜合考慮,取[i]=24[15];r為驅(qū)動鏈輪半徑,單位為m。
驅(qū)動電機(jī)所需額定轉(zhuǎn)矩為
[T=9 550Pn], (18)
式中:[T]為驅(qū)動電機(jī)額定轉(zhuǎn)矩,單位為N·m。
根據(jù)式(16)計(jì)算得出單個驅(qū)動電機(jī)所需功率約為395 W,所需額定轉(zhuǎn)矩約為1.65 N·m。考慮功率儲備,選用一款直流無刷伺服電機(jī),額定功率為785 W,額定轉(zhuǎn)速為3 000 r/min。
3.2 履帶參數(shù)選取
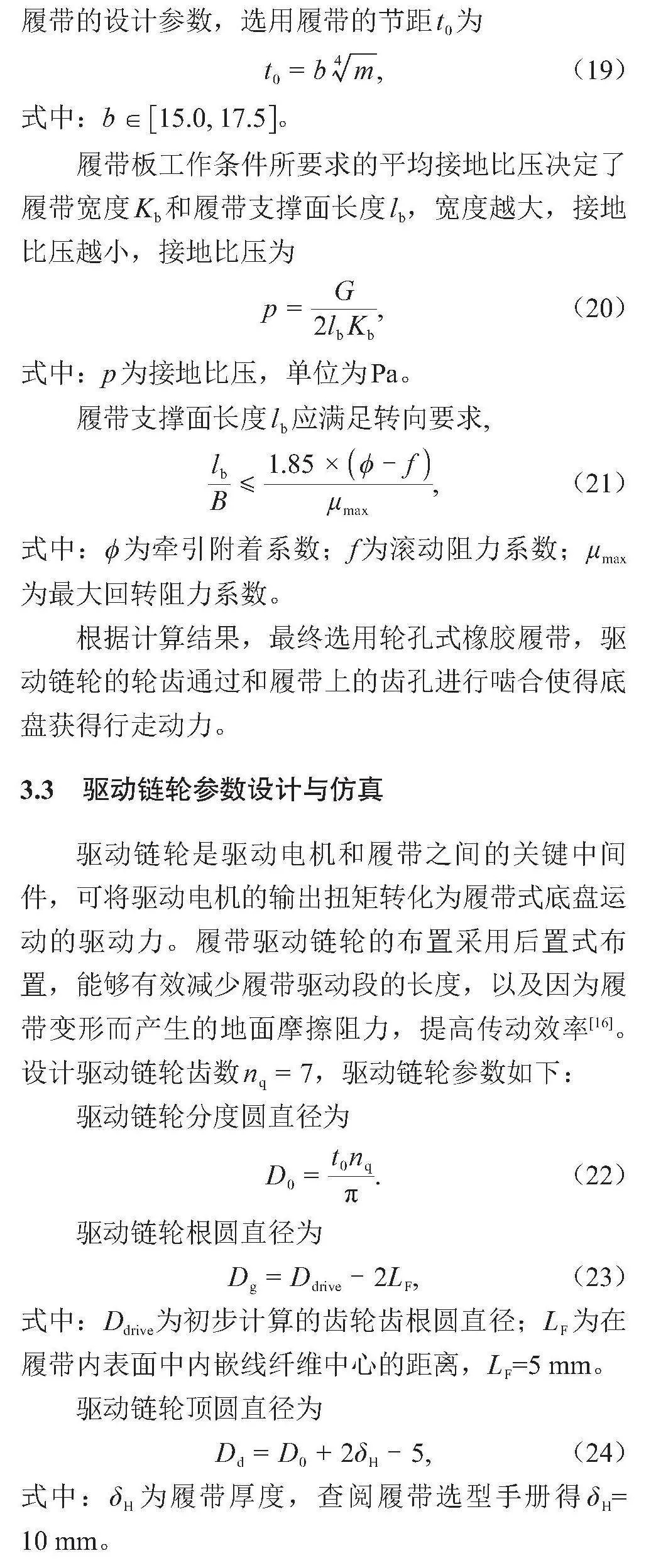
設(shè)計(jì)的履帶式底盤機(jī)器人作業(yè)環(huán)境較為復(fù)雜,對行走機(jī)構(gòu)的附著能力和抗沉陷能力提出了一定的要求。履帶式結(jié)構(gòu)緊湊,相比輪式和腿式結(jié)構(gòu)具有負(fù)重能力強(qiáng)、與地面接觸面積大、下陷深度低、越野性能強(qiáng)等優(yōu)點(diǎn),所以底盤采用履帶式結(jié)構(gòu)。根據(jù)履帶的設(shè)計(jì)參數(shù),選用履帶的節(jié)距[t0]為
[t0=bm4], (19)
式中:[b∈15.0, 17.5]。
履帶板工作條件所要求的平均接地比壓決定了履帶寬度[Kb]和履帶支撐面長度[lb],寬度越大,接地比壓越小,接地比壓為
[p=G2lbKb], (20)
式中:[p]為接地比壓,單位為Pa。
履帶支撐面長度[lb]應(yīng)滿足轉(zhuǎn)向要求,
[lbB≤1.85×?-fμmax], (21)
式中:[?]為牽引附著系數(shù);[f]為滾動阻力系數(shù);[μmax]為最大回轉(zhuǎn)阻力系數(shù)。
根據(jù)計(jì)算結(jié)果,最終選用輪孔式橡膠履帶,驅(qū)動鏈輪的輪齒通過和履帶上的齒孔進(jìn)行嚙合使得底盤獲得行走動力。
3.3 驅(qū)動鏈輪參數(shù)設(shè)計(jì)與仿真
驅(qū)動鏈輪是驅(qū)動電機(jī)和履帶之間的關(guān)鍵中間件,可將驅(qū)動電機(jī)的輸出扭矩轉(zhuǎn)化為履帶式底盤運(yùn)動的驅(qū)動力。履帶驅(qū)動鏈輪的布置采用后置式布置,能夠有效減少履帶驅(qū)動段的長度,以及因?yàn)槁膸ё冃味a(chǎn)生的地面摩擦阻力,提高傳動效率[16]。設(shè)計(jì)驅(qū)動鏈輪齒數(shù)[nq=7],驅(qū)動鏈輪參數(shù)如下:
驅(qū)動鏈輪分度圓直徑為
[D0=t0nqπ]. (22)
驅(qū)動鏈輪根圓直徑為
[Dg=Ddrive-2LF], (23)
式中:Ddrive為初步計(jì)算的齒輪齒根圓直徑;[LF]為在履帶內(nèi)表面中內(nèi)嵌線纖維中心的距離,[LF]=5 mm。
驅(qū)動鏈輪頂圓直徑為
[Dd=D0+2δH-5,] (24)
式中:[δH]為履帶厚度,查閱履帶選型手冊得[δH]=10 mm。
根據(jù)驅(qū)動鏈輪在坡地起步時受到的驅(qū)動扭矩,建立ANSYS有限元模型,分析驅(qū)動鏈輪在加載外載荷下的變形效果。最大變形量為0.037 6 mm,滿足工況要求,最大等效應(yīng)力為100.1 MPa,小于其材料的屈服強(qiáng)度,驅(qū)動齒輪變形量與等效力圖如圖6所示。
3.4 承重輪、張緊輪與張緊裝置
承重輪的作用是將整機(jī)重量傳遞到履帶上,使整機(jī)沿履帶軌道運(yùn)動,并夾持履帶不橫向滑脫,使得履帶能夠在地面上滑移。在丘陵山地作業(yè)時,經(jīng)常會遇到泥地、揚(yáng)塵等惡劣環(huán)境,承重輪需能承受一定的沖擊,并且具有一定的耐磨性。為了減少承重輪輪面磨損,承重輪與履帶導(dǎo)軌之間的接觸應(yīng)力為[17]
[σj=4 340GtArbO≤σj,] (25)
式中:[σj]為許用接觸應(yīng)力,[σj]=230 MPa;[Gt]為整機(jī)質(zhì)量,單位為kg;A為承重輪輪面與履帶導(dǎo)軌的接觸寬度,單位為mm;[O]為承重輪總數(shù)。
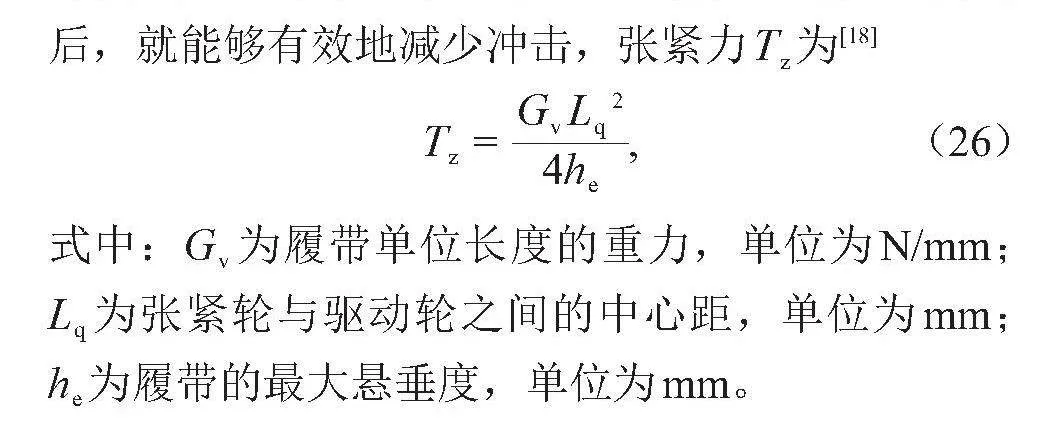
履帶在運(yùn)動中會產(chǎn)生振跳現(xiàn)象,履帶的振跳會引起沖擊、振蕩和額外的功率消耗,加速零件磨損。張緊輪和張緊裝置能夠使得履帶保持一定的張緊度,在一定程度上減少這種現(xiàn)象。履帶張緊后,也可以避免其在作業(yè)時脫落。張緊輪是張緊裝置的組成成分,通過它引導(dǎo)履帶正確卷繞。張緊裝置的調(diào)整方式采用螺桿調(diào)整,通過調(diào)節(jié)螺桿和螺母來改變張緊輪的位置,達(dá)到張緊的目的,其結(jié)構(gòu)簡單,具有一定強(qiáng)度和剛度。在履帶運(yùn)行受到?jīng)_擊時,螺桿的調(diào)整不具有緩沖作用,而在螺桿上加入彈簧之后,就能夠有效地減少沖擊,張緊力[Tz]為[18]
[Tz=GvLq24he], (26)
式中:[Gv]為履帶單位長度的重力,單位為N/mm;[Lq]為張緊輪與驅(qū)動輪之間的中心距,單位為mm;[he]為履帶的最大懸垂度,單位為mm。
3.5 機(jī)架設(shè)計(jì)及仿真
機(jī)架需要能承受來自履帶行走系統(tǒng)和其他作業(yè)結(jié)構(gòu)受到振蕩時的沖擊,其結(jié)構(gòu)設(shè)計(jì)方案以及布置方式顯得尤為關(guān)鍵[19]。綜合考慮本文設(shè)計(jì)的履帶式底盤整機(jī)布置要求,采用履帶主體框架放置在兩邊、機(jī)架安裝在中間的方式,保證機(jī)架的中間位置能夠布置作業(yè)機(jī)構(gòu)。上車的支撐框架采用鋼結(jié)構(gòu)式框架,主體采用Φ25 mm×4 mm與Φ38 mm×5 mm的鋼管焊接而成,在保證整體剛度的同時降低加工難度,且在整機(jī)傾翻后能有效保護(hù)其內(nèi)部設(shè)備不受損壞。
利用有限元軟件ANSYS Workbench對車架進(jìn)行靜力學(xué)分析,以確保機(jī)架能夠具有足夠的承載能力。定義材料為Q235碳素結(jié)構(gòu)鋼,密度為7.85×[10-6] [kg/mm3],彈性模量為2.01×[105] [MPa],泊松比為0.3,拉伸屈服強(qiáng)度為235 MPa,極限拉伸強(qiáng)度為420 MPa。
根據(jù)各部件的質(zhì)量和位置分布,定義機(jī)架各部分所受到的載荷。機(jī)架兩端安裝履帶,中間承受作業(yè)機(jī)構(gòu)的重量,后方背負(fù)電池組,在相對位置分別施加作用力,分析得到的機(jī)架應(yīng)力、位移分布云圖如圖7所示。最大應(yīng)力為35.611 MPa,出現(xiàn)在機(jī)架與履帶連接處,滿足強(qiáng)度要求;最大形變量為0.094 8 mm,滿足剛度要求。
4 履帶式底盤動力學(xué)模型的建立與分析
4.1 幾何模型的建立
在建立幾何模型時,通常對履帶式底盤做簡化處理,將電機(jī)、減速器、機(jī)架簡化為一個剛體,這時履帶式底盤可簡化為主體和履帶行走機(jī)構(gòu)。運(yùn)用UG軟件對主體進(jìn)行三維建模,以左張緊輪軸向外側(cè)為坐標(biāo)軸軸心,履帶布置方向?yàn)閤軸方向,張緊輪位置指向驅(qū)動鏈輪位置為x軸正軸,左張緊輪軸線為y軸方向,指向右張緊輪方向?yàn)閥軸正軸,履帶式底盤垂直指向機(jī)架位置為z軸正向,建立坐標(biāo)系,為履帶底盤每個零件分別賦予相應(yīng)材料,測量其重心坐標(biāo)為(232, 506, 152);之后導(dǎo)入RecurDyn軟件中,采用RecurDyn軟件低速履帶模塊(Track-LM)建立履帶行走機(jī)構(gòu),兩側(cè)履帶行走機(jī)構(gòu)分別包括1個驅(qū)動鏈輪、2個承重輪、1個張緊輪、1個履帶機(jī)架和1條履帶,對各組件之間添加約束,具體如表2所示。
4.2 路面模型的建立
RecurDyn軟件提供地面參數(shù)Ground模塊,根據(jù)經(jīng)典土壤力學(xué)理論,本文采用其中的黏土(clayey soil)地面模型,其路面特征參數(shù)如表3所示。
4.3 模型驅(qū)動設(shè)置
為了使丘陵山地模塊化小型機(jī)器人行走系統(tǒng)能夠工作,需要對履帶行走機(jī)構(gòu)添加驅(qū)動函數(shù),選擇STEP函數(shù)作為驅(qū)動函數(shù)添加在驅(qū)動鏈輪的旋轉(zhuǎn)副上,
[STEP(t,t0,h0,t1,h1)], (27)
式中:[t]為自變量;[t0]、[t1]分別為自變量的初始值與終止值,即仿真開始與結(jié)束的時間,根據(jù)仿真內(nèi)容的不同更改[t0]、[t1]的數(shù)值;h0、h1為設(shè)計(jì)變量的初始值與終止值,選擇角速度作為設(shè)計(jì)變量。
4.4 履帶式底盤動力學(xué)模擬仿真
根據(jù)前文理論分析計(jì)算所得到的驅(qū)動電機(jī)最大轉(zhuǎn)矩,探討履帶式底盤機(jī)器人的最大爬坡角度與最小轉(zhuǎn)向半徑。
1)根據(jù)履帶式底盤機(jī)器人爬坡路面的特點(diǎn),軟件中路面寬度設(shè)定為1 700 mm,通過Ground模塊建立25°、28°、31°、34°組合坡道,在驅(qū)動鏈輪旋轉(zhuǎn)副添加驅(qū)動角速度,具體如下:STEP(t, 0, 0, 1.5, 20.0)。
仿真所得到的履帶式底盤組合坡道質(zhì)心Z坐標(biāo)位移、速度與扭矩如圖8所示,紅色實(shí)線為履帶式底盤質(zhì)心Z坐標(biāo)變化曲線,黑色實(shí)線為履帶式底盤速度變化曲線,點(diǎn)劃線為履帶扭矩隨時間變化的曲線圖。在0~1.5 s內(nèi),履帶轉(zhuǎn)速由0增加至20 rad/s,1.5 s后,履帶以1.78 m/s勻速行駛,扭矩波動范圍不大。2.0 s后開始爬坡,此時履帶式底盤質(zhì)心升高,速度出現(xiàn)短暫的波動后穩(wěn)定下來,扭矩值增加,最大值為39.8 N·m,到4.5 s時爬坡完成,扭矩也基本穩(wěn)定。當(dāng)履帶式底盤機(jī)器人開始爬坡動作時,速度會下降,在13.5 s時,速度達(dá)到最低1.06 m/s,扭矩在此之后增加,在第16.0 s時完成爬坡動作,34°爬坡成功。
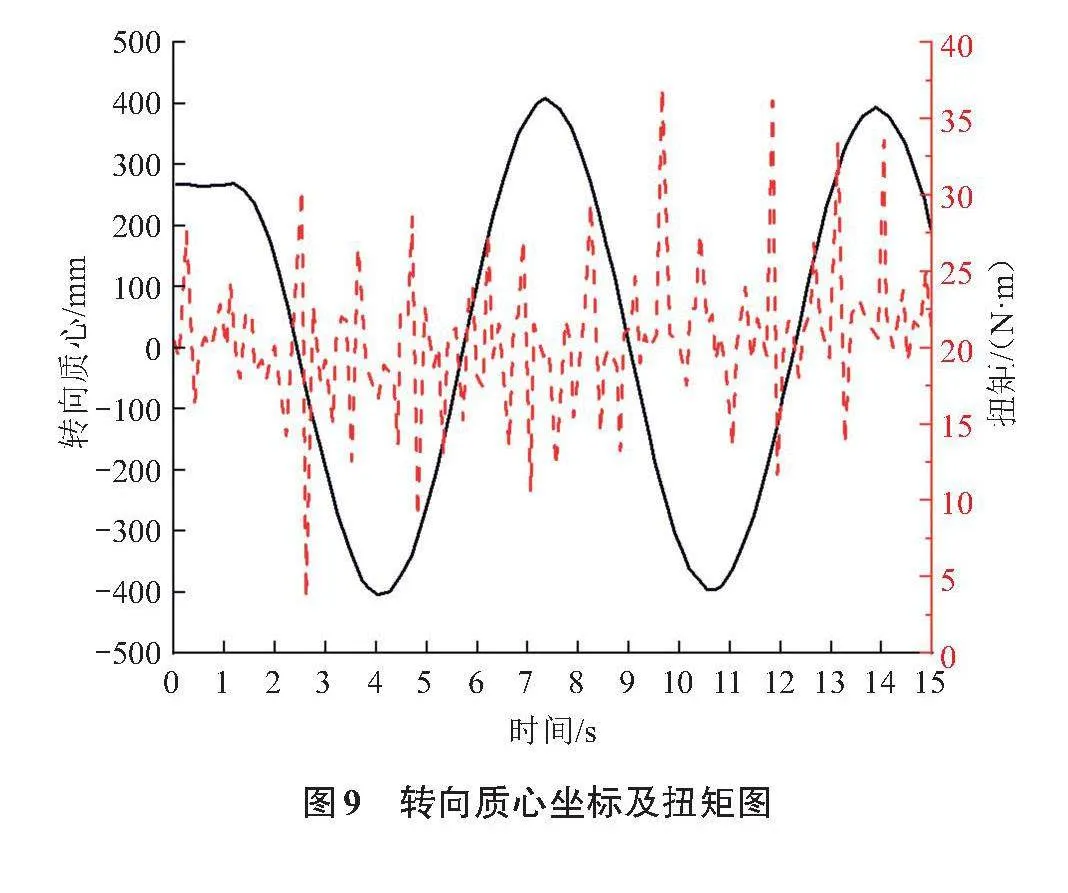
2)平地轉(zhuǎn)向路面長度和寬度均設(shè)定為4 000 mm,通過Ground模塊建立地面,在驅(qū)動鏈輪旋轉(zhuǎn)副添加驅(qū)動角速度,具體如下:STEP(t, 0, 0, 1.5, 20.0)、STEP(t, 0, 0, 1.5, -20.0)。
3)在標(biāo)準(zhǔn)路面轉(zhuǎn)向時,底盤雙側(cè)履帶差速制動,使得轉(zhuǎn)彎半徑達(dá)到最小值。其單側(cè)履帶驅(qū)動扭矩的最大值為38.7 N·m,扭矩均值為19.8 N·m,轉(zhuǎn)彎半徑在407.0 mm,如圖9所示。
5 樣機(jī)試驗(yàn)
根據(jù)上述計(jì)算與仿真結(jié)果,為驗(yàn)證履帶式底盤機(jī)器人爬坡、轉(zhuǎn)向與越障性能是否符合預(yù)期設(shè)計(jì)要求,根據(jù)《農(nóng)業(yè)機(jī)械生產(chǎn)試驗(yàn)方法》(GB/T 5667—2008)[20],研制樣機(jī)并進(jìn)行行駛速度、轉(zhuǎn)彎半徑、爬坡角度與越障高度試驗(yàn),樣機(jī)如圖10所示。
5.1 試驗(yàn)方法與結(jié)果
1)行駛速度:通過遙控手柄控制履帶在長度為30 m的水泥平地直線行駛,測定樣機(jī)通過測定區(qū)間所需時間,重復(fù)5次,計(jì)算最大行駛速度。直線行駛速度試驗(yàn)結(jié)果如表4所示,平均速度為6.11 km/h。
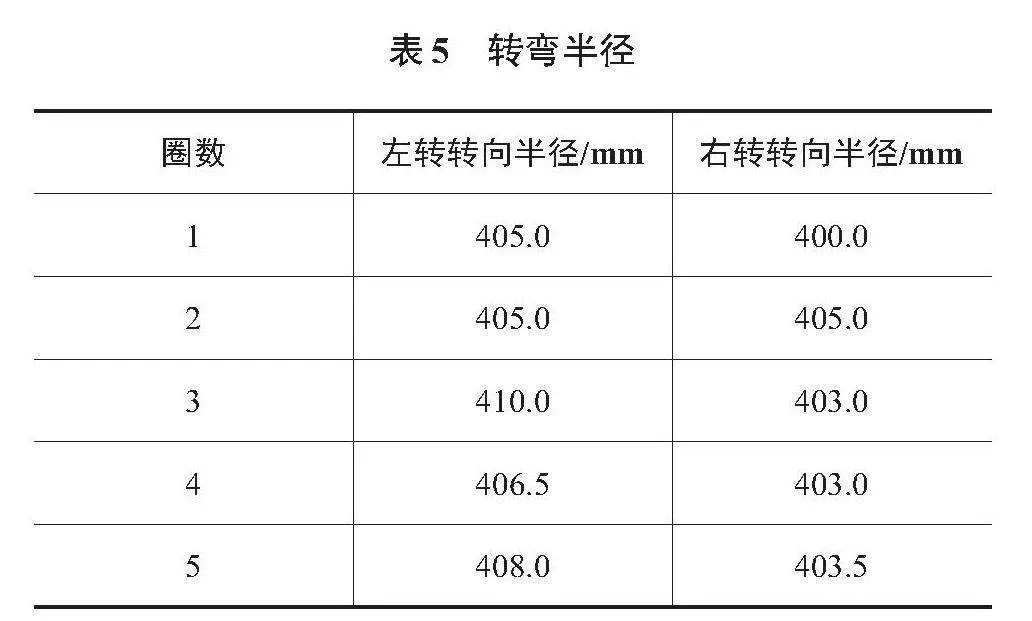
2)轉(zhuǎn)彎半徑:遙控樣機(jī),使其以5.00 km/h的作業(yè)速度在草地上執(zhí)行轉(zhuǎn)向指令,一側(cè)驅(qū)動鏈輪制動,另一側(cè)驅(qū)動鏈輪前進(jìn),重復(fù)差速轉(zhuǎn)向半徑試驗(yàn)5次,利用鋼尺測量履帶在地面留下的軌跡圓半徑。試驗(yàn)結(jié)果如表5所示,最小轉(zhuǎn)彎半徑為403.0 mm。
3)爬坡角度:搭設(shè)簡易坡臺,模擬草地爬坡坡道,設(shè)置坡臺初始角度為25°,之后每次試驗(yàn)增加3°,直至樣機(jī)無法駛上坡道。測量得出最大爬坡角度,當(dāng)爬坡角度為38°時開始出現(xiàn)滑移現(xiàn)象。
4)越障高度:在平地進(jìn)行越障試驗(yàn),根據(jù)所計(jì)算的坡地越障高度分析,搭建越障臺階。以勻速作業(yè)速度跨越障礙物臺階,直至無法跨越為止。根據(jù)越障試驗(yàn)可知履帶式底盤機(jī)器人最大越障高度為170 mm。
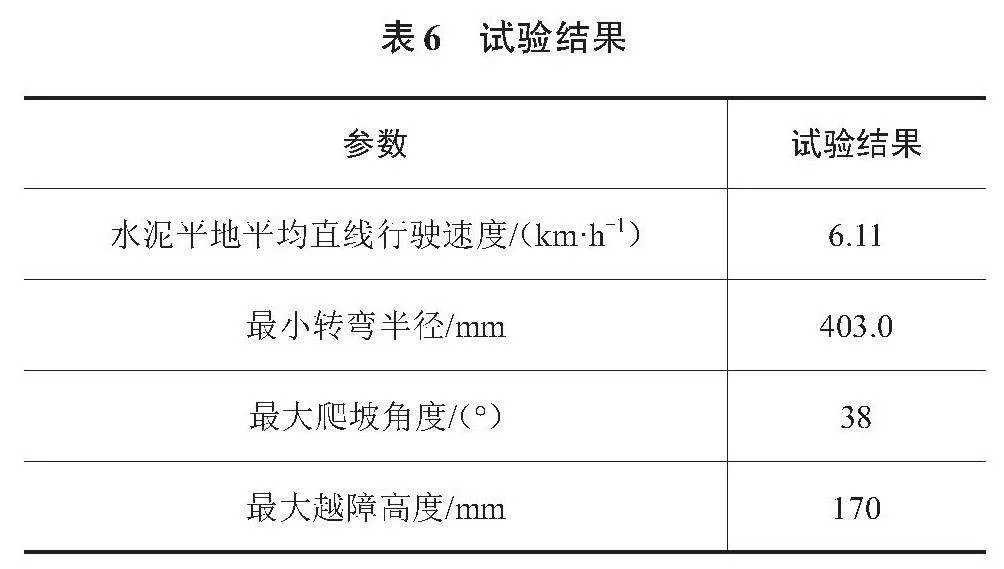
5.2 試驗(yàn)結(jié)果分析
試驗(yàn)結(jié)果如表6所示,結(jié)果表明,小型模塊化履帶式底盤在水泥平地上的平均直線行駛速度為6.11 km/h;最小轉(zhuǎn)彎半徑為403.0 mm;最大爬坡角度為38°,略大于所設(shè)計(jì)的爬坡角度,這與樣機(jī)的重心布置產(chǎn)生的偏移有關(guān)。實(shí)際樣機(jī)的重心較為接近理論值,且試驗(yàn)坡臺與草地對履帶表面之間的摩擦系數(shù)有所不同,實(shí)際工況下爬坡角度會有一定差異。最大越障高度為170 mm,理論最大越障高度略小于試驗(yàn)值,出現(xiàn)這一情況的原因在于橡膠履帶表面結(jié)構(gòu)增加了履帶與障礙物之間的附著系數(shù)。
6 結(jié)論
針對我國丘陵山地經(jīng)濟(jì)作物種植園區(qū)非結(jié)構(gòu)化的地形條件以及種植作物采收多樣性問題,本文設(shè)計(jì)了一款小型履帶式動力底盤。首先,結(jié)合我國相關(guān)的農(nóng)機(jī)農(nóng)藝要求,提出丘陵山地履帶式動力底盤的設(shè)計(jì)要求,確定整機(jī)結(jié)構(gòu)組成與系統(tǒng)布置,對履帶式底盤的穩(wěn)定性和通過性進(jìn)行研究;其次,對驅(qū)動系統(tǒng)進(jìn)行設(shè)計(jì),選取履帶與電動機(jī)參數(shù)并對驅(qū)動輪以及機(jī)架進(jìn)行有限元分析;再次,通過建立虛擬樣機(jī)模型,對履帶式底盤爬坡工況進(jìn)行仿真分析;最后,依據(jù)計(jì)算參數(shù)試制了實(shí)體樣機(jī),并設(shè)計(jì)和進(jìn)行了整機(jī)的性能試驗(yàn)。結(jié)論如下:
1)根據(jù)丘陵山地作業(yè)對動力底盤的作業(yè)要求,完成了履帶式底盤的結(jié)構(gòu)設(shè)計(jì)和布置。
2)對履帶式底盤的通過性和穩(wěn)定性進(jìn)行分析可知,重心對坡面橫、縱向穩(wěn)定性影響較大,在坡面行走時,履帶式底盤會發(fā)生滑移而不發(fā)生傾翻。
3)建立動力學(xué)模型,對爬坡與轉(zhuǎn)向工況進(jìn)行仿真分析,得到履帶在不同工況下驅(qū)動鏈輪所需的驅(qū)動轉(zhuǎn)矩、速度與質(zhì)心曲線,證明履帶式底盤運(yùn)行平穩(wěn),工作可靠。
4)對履帶式底盤機(jī)器人進(jìn)行試制與整機(jī)性能試驗(yàn)。通過經(jīng)濟(jì)性測試可知,履帶式底盤機(jī)器人平均直線行駛速度為6.11 km/h,最小轉(zhuǎn)彎半徑為403.0 mm,最大爬坡角度為38°,最大越障高度為170 mm,滿足使用要求。
參考文獻(xiàn)
[1] 孫景彬,劉志杰,楊福增,等.丘陵山地農(nóng)業(yè)裝備與坡地作業(yè)關(guān)鍵技術(shù)研究綜述[J].農(nóng)業(yè)機(jī)械學(xué)報,2023,54(5):1-18.
[2] 羅錫文.對發(fā)展丘陵山區(qū)農(nóng)業(yè)機(jī)械化的思考[J].農(nóng)機(jī)科技推廣,2011(2):17-20.
[3] 姬江濤,鄭治華,杜蒙蒙,等.農(nóng)業(yè)機(jī)器人的發(fā)展現(xiàn)狀及趨勢[J].農(nóng)機(jī)化研究,2014,36(2):1-4,9.
[4] 劉平義,柯呈鵬,柯婷,等.丘陵山區(qū)農(nóng)用預(yù)檢測主動調(diào)平底盤設(shè)計(jì)與試驗(yàn)[J].農(nóng)業(yè)機(jī)械學(xué)報,2020,51(3):371-378.
[5] 曾俊豪,高巧明,黃貴東,等.一種果園除草底盤設(shè)計(jì)與仿真[J].廣西科技大學(xué)學(xué)報,2021,32(3):53-59,66.
[6] 劉九慶,姚凱.履帶式森林滅火炮轉(zhuǎn)向性能分析與驗(yàn)證[J].森林工程,2021,37(3):95-102.
[7] CHAJKIN A P,DOBRETSOV R Y,SOKOLOVA V A,et al.Mathematical model for assessing lateral stability of articulated tracked vehicles[J].Journal of Physics:Conference Series,2021,2094(4):042005.
[8] DUDZINSKI P A,CHOLODOWSKI J.A method for predicting the internal motion resistance of rubber-tracked undercarriages,Pt.1:a review of the state-of-the-art methods for modeling the internal resistance of tracked vehicles[J].Journal of Terramechanics,2021,96:81-100.
[9] 扈凱,張文毅,李坤,等.高地隙三角履帶底盤多體動力學(xué)建模與試驗(yàn)[J].農(nóng)業(yè)機(jī)械學(xué)報,2021,52(7):386-394.
[10] 謝京瑋,諶炎輝,鄭特.多特征復(fù)雜零件的模塊化設(shè)計(jì)[J].廣西科技大學(xué)學(xué)報,2020,31(4):97-103.
[11] 韓振浩,朱立成,苑嚴(yán)偉,等.山地果園履帶底盤坡地通過性能分析與優(yōu)化設(shè)計(jì)[J].農(nóng)業(yè)機(jī)械學(xué)報,2022,53(5):413-421,448.
[12] 潘冠廷,楊福增,孫景彬,等.小型山地履帶拖拉機(jī)爬坡越障性能分析與試驗(yàn)[J].農(nóng)業(yè)機(jī)械學(xué)報,2020,51(9):374-383.
[13] 何維山,唐俊,宋正輝.某山區(qū)公路碎石土滑坡成因及穩(wěn)定性分析[J].廣西科技大學(xué)學(xué)報,2021,32(4):100-103.
[14] BROOKS C P.The automotive chassis:engineering principles[J].Proceedings of the Institution of Mechanical Engineers,Part D:Journal of Automobile Engineering,2002,216(8):707.
[15] 朱雙霞,張紅鋼.機(jī)械設(shè)計(jì)基礎(chǔ)[M].重慶:重慶大學(xué)出版社,2016.
[16] 唐經(jīng)世.工程機(jī)械底盤學(xué)[M].成都:西南交通大學(xué)出版社,2002.
[17] 諸文農(nóng).底盤設(shè)計(jì)[M].北京:機(jī)械工業(yè)出版社,1981.
[18] 楊敬偉.履帶底盤導(dǎo)向張緊裝置型式研究與設(shè)計(jì)應(yīng)用[J].機(jī)械傳動,2013,37(5):114-116.
[19] 葉燕帥,傅愛軍,陳釗炎,等.基于HyperWorks的巴哈賽車車架仿真與優(yōu)化研究[J].廣西科技大學(xué)學(xué)報,2023,34(3):14-19.
[20] 全國農(nóng)業(yè)機(jī)械標(biāo)準(zhǔn)化技術(shù)委員會.農(nóng)業(yè)機(jī)械 生產(chǎn)試驗(yàn)方法:GB/T 5667—2008[S].北京:中國標(biāo)準(zhǔn)出版社,2008.
Design and testing of a small tracked powered chassis for hilly
mountainous terrain
CAI Yuchen1, GAO Qiaoming*1, 2, LUO Yueyang1, MI Zerong1, LI Zongpeng1, LYU Pan1
(1. School of Mechanical and Automotive Engineering, Guangxi University of Science and Technology, Liuzhou 545616, China; 2. Huilaibao Machinery Manufacturing Co., Ltd., Hepu County, Beihai 536100, China)
Abstract: Aiming at the unstructured terrain of Guangxi hilly and mountainous planting areas for economic crops and the complex growing environment of various crops, a small tracked power chassis with high mobility and adaptable to the hilly and mountainous terrain is designed. This paper takes the crawler chassis as the research object, establishes the crawler chassis slope walking model, researches its stability and passability when climbing slopes, and puts forward the chassis design scheme and parameter selection. Based on ANSYS Workbench, the force analysis of the frame is carried out, with the maximum displacement deformation of the frame 0.094 8 mm, and the maximum equivalent force 35.611 MPa, which meets the requirements of strength use. The virtual modeling of the crawler chassis is carried out using RecurDyn dynamics simulation software to analyze the changes of the center of mass and torque of the chassis in the process of climbing and steering, which verifies the feasibility of the scheme. The results of the field test show that the crawler chassis has a straight line traveling speed of 6.11 km/h on the concrete flat ground, the minimum turning radius of 403.0 mm, the maximum climbing angle of 38° on the grass, the maximum height of 170 mm over the obstacle, and the chassis runs smoothly during the operation. The parameters of the crawler chassis designed can meet the requirements of the whole machine design, and the operation indexes meet the requirements of the relevant standards, and it has good performance of climbing and crossing obstacles, and the research results can provide a reference for the design and development of the crawler chassis in hilly and mountainous areas.
Keywords: hilly mountainous terrain; tracked undercarriage; agricultural machinery; RecurDyn
(責(zé)任編輯:于艷霞,黎 婭)
收稿日期:2023-09-08;修回日期:2023-10-11
基金項(xiàng)目:中央引導(dǎo)地方科技發(fā)展資金項(xiàng)目(桂科ZY22096023);廣西科技計(jì)劃項(xiàng)目(桂科AB21220058)資助
第一作者:蔡羽晨,在讀碩士研究生
*通信作者:高巧明,博士,高級工程師,碩士生導(dǎo)師,研究方向:農(nóng)業(yè)機(jī)械化關(guān)鍵技術(shù)與裝備、圖像模式識別,E-mail:walkergao@163.com
