基于算數(shù)優(yōu)化算法的VMD-BiLSTM模型的松土裝置工況識(shí)別
2024-11-12 00:00:00董兆森張佳喜蔣永新張麗羅文杰高澤斌
中國(guó)農(nóng)機(jī)化學(xué)報(bào) 2024年11期






摘要:當(dāng)對(duì)滾筒式殘膜回收機(jī)的關(guān)鍵裝置松土齒耙的應(yīng)力應(yīng)變進(jìn)行實(shí)時(shí)監(jiān)測(cè)時(shí),所獲得應(yīng)力應(yīng)變信號(hào)易受外部環(huán)境的干擾,難以從信號(hào)中識(shí)別壅土故障。針對(duì)該問題,通過ANSYS分析確定松土齒耙的應(yīng)變監(jiān)測(cè)部位,利用應(yīng)變片對(duì)松土齒耙不同工況進(jìn)行應(yīng)變監(jiān)測(cè)試驗(yàn)。基于監(jiān)測(cè)數(shù)據(jù),提出一種基于算數(shù)優(yōu)化算法(AOA)的變分模態(tài)分解(VMD)—雙向長(zhǎng)短期記憶網(wǎng)絡(luò)(BiLSTM)神經(jīng)網(wǎng)絡(luò)模型工況識(shí)別方法。首先,利用AOA對(duì)VMD模態(tài)分量的k值和懲罰因子α進(jìn)行參數(shù)優(yōu)化;然后,使用VMD對(duì)松土齒耙應(yīng)變信號(hào)進(jìn)行自適應(yīng)分解;最后,根據(jù)皮爾遜系數(shù)將分解并重構(gòu)后的信號(hào)輸入BiLSTM網(wǎng)絡(luò)中進(jìn)行特征學(xué)習(xí),實(shí)現(xiàn)松土齒耙的工況識(shí)別。結(jié)果表明,該方法實(shí)現(xiàn)對(duì)松土齒耙空載、正常工作、輕度壅土、嚴(yán)重壅土4種工況精準(zhǔn)識(shí)別,且效果優(yōu)于VMD-LSTM、BiLSTM、LSTM神經(jīng)網(wǎng)絡(luò)模型,識(shí)別準(zhǔn)確率達(dá)到99.1%以上,有效提高松土齒耙工況識(shí)別的準(zhǔn)確率。
關(guān)鍵詞:松土裝置;工況識(shí)別;算數(shù)優(yōu)化算法;變分模態(tài)分解;雙向長(zhǎng)短期記憶網(wǎng)絡(luò)
中圖分類號(hào):S225 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):2095?5553 (2024) 11?0021?07
Condition recognition of soil breaking device by VMD-BiLSTM model
based on arithmetic optimization algorithm
Dong Zhaosen1, Zhang Jiaxi1, Jiang Yongxin2, Zhang Li2, Luo Wenjie2, Gao Zebin1
(1. College of Mechanical and Electrical Engineering, Xinjiang Agricultural University, Urumqi, 830052, China;
2. Institute of Agricultural Mechanization, Xinjiang Academy of Agricultural Sciences, Urumqi, 830091, China)
Abstract: When the stress and strain of the loose tooth rake, the key device of the drum film recovery machine, is monitored in real time, the obtained stress and strain signal is easy to be interfered by the external environment and it is difficult to identify the back?up fault from the signal. In order to solve this problem, the strain monitoring position of the pine tooth harrow was determined by ANSYS analysis, and the strain gauge was used to carry out strain monitoring tests on the pine tooth harrow in different working conditions. Based on the monitoring data, a condition recognition method of variational mode decomposition (VMD)-BiLSTM neural network model based on arithmetic optimization algorithm (AOA) was proposed. Firstly, the parameters of k value and penalty factor α of VMD modal component were optimized by AOA. Then, VMD was used for adaptive decomposition of strain signal of pine tooth harrow. Finally, according to Pearson coefficient, the decomposed and reconstructed signals were input into BiLSTM network for feature learning, so as to realize the condition recognition of the pine tooth rake. The results show that the method can accurately recognize 4 kinds of working conditions such as no?load, normal working conditions, slight back?up and severe back?up, and the effect is better than VMD-LSTM, BiLSTM and LSTM neural network models, with the recognition accuracy of more than 99.1%, which effectively improves the recognition accuracy of working conditions of the pine tooth harrow.
Keywords: soil loosening device; condition identification; arithmetic optimization algorithm(AOA); variational mode decomposition (VMD); BiLSTM
0 引言
松土齒耙是滾筒式殘膜回收機(jī)中重要的工作部件之一,在滾筒式殘膜回收機(jī)工作時(shí),疏松地膜下的土壤以便于收膜裝置工作,是保證收膜工作效率的重要前提。田間作業(yè)環(huán)境復(fù)雜,土壤高低不平,松土齒耙在工作中經(jīng)常發(fā)生壅土現(xiàn)象,致使整個(gè)機(jī)具工作效率降低。因此對(duì)松土齒耙的工況識(shí)別進(jìn)行研究有重要意義。
在松土齒耙運(yùn)行過程中,應(yīng)變信號(hào)含有豐富的信息,研究其應(yīng)變信號(hào)可以對(duì)松土齒耙進(jìn)行工況識(shí)別。目前,針對(duì)信號(hào)的分析方法主要有經(jīng)驗(yàn)?zāi)B(tài)分解(EMD)、集合模態(tài)分解(EEMD)小波變換、變分模態(tài)分解(VMD)等。其中VMD被廣泛應(yīng)用于振動(dòng)信號(hào),可以有效的從信號(hào)中進(jìn)行特征提取,并且相較于其他方法VMD具有精度高、收斂快等優(yōu)點(diǎn)。VMD中關(guān)鍵參數(shù)的設(shè)置對(duì)信號(hào)處理結(jié)果至關(guān)重要,針對(duì)這一問題,目前尚未有統(tǒng)一方法,許多學(xué)者選擇優(yōu)化算法對(duì)關(guān)鍵參數(shù)進(jìn)行選取。Luo等[1]提出了一種改進(jìn)差分搜索優(yōu)化的自適應(yīng)VMD與隨機(jī)共振相結(jié)合的方法,更準(zhǔn)確的實(shí)現(xiàn)滾動(dòng)軸承早期弱信號(hào)的故障診斷;Li等[2]利用算數(shù)優(yōu)化算法優(yōu)化VMD,將離散熵作為適應(yīng)度函數(shù),實(shí)現(xiàn)了天然氣管道泄漏信號(hào)檢測(cè);許佳等[3]提出改進(jìn)灰狼算法對(duì)VMD進(jìn)行參數(shù)優(yōu)化用于對(duì)高壓油泵進(jìn)行故障診斷;蔣田勇等[4]利用天鷹優(yōu)化算法天鷹優(yōu)化器對(duì)VMD的參數(shù)優(yōu)化,最終能夠有效的濾除了橋梁信號(hào)的干擾噪聲;郭梓良等[5]針對(duì)齒輪箱故障,使用磷蝦群算法優(yōu)化的VMD對(duì)故障信號(hào)分解,有效的抑制了模態(tài)混疊,有效的提高了故障識(shí)別準(zhǔn)確率。
智能診斷技術(shù)的迅速發(fā)展,雙向長(zhǎng)短期記憶網(wǎng)絡(luò)(BiLSTM)被提出并廣泛的應(yīng)用于分類識(shí)別方法中,它是循環(huán)神經(jīng)網(wǎng)絡(luò)(RNN)的一種,非常適用于對(duì)時(shí)間序列數(shù)據(jù)的處理。Mohamed等[6]提出一種基于改進(jìn)BiLSTM的軸承故障診斷方法,通過與傳統(tǒng)CNN比較,該方法識(shí)別準(zhǔn)確率更高;Yang等[7]針對(duì)石油測(cè)井儲(chǔ)層識(shí)別,提出TCN-SA-BiLSTM模型,克服了傳統(tǒng)測(cè)井能力上的不足,提高了油氣勘探的效率;余萍等[8]提出一種基于蜜獾優(yōu)化注意力雙向長(zhǎng)短時(shí)記憶網(wǎng)絡(luò)的滾動(dòng)軸承故障診斷方法,故障診斷準(zhǔn)確率達(dá)到了99.5%;高超等[9]針對(duì)電力電纜故障問題,提出了一種基于CNN-BiLSTM的故障診斷方法,對(duì)不同故障進(jìn)行診斷整體準(zhǔn)確率達(dá)到98.37%;劉子旭等[10]針對(duì)刀具磨損狀態(tài),提出了基于SSA-VMD-BiLSTM的狀態(tài)識(shí)別模型,結(jié)果表明BiLSTM模型相較于LSTM更好的處理時(shí)序信號(hào)。
綜上,VMD可以對(duì)信號(hào)有效的處理,但其關(guān)鍵參數(shù)選取尚且沒有最優(yōu)方法,國(guó)內(nèi)外諸多學(xué)者分別使用不同的優(yōu)化方法優(yōu)化關(guān)鍵參數(shù),都起到了良好的效果;雙向長(zhǎng)短時(shí)記憶網(wǎng)絡(luò)相對(duì)于傳統(tǒng)神經(jīng)網(wǎng)絡(luò)有更好的表現(xiàn),通過前置算法對(duì)信號(hào)進(jìn)行處理,BiLSTM可以更好的實(shí)現(xiàn)不同狀態(tài)的分類識(shí)別,以及對(duì)信號(hào)的分類。
因此,提出一種基于算數(shù)優(yōu)化算法的VMD-BiLSTM的松土齒耙工況識(shí)別模型,利用優(yōu)化后的VMD算法分析松土齒耙各種狀態(tài)下的應(yīng)力應(yīng)變信號(hào),根據(jù)皮爾遜系數(shù)提取有效的特征分量將其重構(gòu),最后將重構(gòu)后的信號(hào)輸入BiLSTM神經(jīng)網(wǎng)絡(luò)模型中訓(xùn)練,實(shí)現(xiàn)松土齒耙工況的識(shí)別。
1 算法原理
1.1 算數(shù)優(yōu)化算法基本原理
算術(shù)優(yōu)化算法(AOA)是2021年提出的一種根據(jù)算術(shù)操作符的分布特性實(shí)現(xiàn)全局尋優(yōu)的元啟發(fā)式優(yōu)化算法[11]。
1) 通過數(shù)學(xué)優(yōu)化器加速函數(shù)選擇優(yōu)化策略。當(dāng)r1>MOA時(shí),進(jìn)行全局探索階段,當(dāng)r1<MOA時(shí),進(jìn)行局部開發(fā)階段。其中r1是0~1之間的隨機(jī)數(shù)。
[MOA(t)=Min+t×(Max-MinT)] (1)
式中: MOA(t) ——當(dāng)前加速函數(shù)值;
Max——加速函數(shù)最大值,本文選取1;
Min——加速函數(shù)最小值,本文選取為0.2;
t——當(dāng)前迭代次數(shù);
T——總迭代次數(shù)。
2) 探索階段。乘除運(yùn)算實(shí)現(xiàn)全局探索,更新的全局分散性,當(dāng)[r2<0.5]時(shí),執(zhí)行除法探索策略,當(dāng)[r2≥0.5]時(shí),執(zhí)行乘法探索策略。
[X(t+1)=Xb(t)MOP+ε?(UB-LB)?φ+LB r2<0.5Xb(t)?MOP?(UB-LB)?φ+LB r2≥0.5] (2)
式中: [X(t+1)]——下一代粒子位置;
[Xb(t)]——當(dāng)前適應(yīng)度最佳粒子位置;
MOP——數(shù)學(xué)優(yōu)化器概率;
ε——極小值;
φ——搜索控制參數(shù),值為0.499;
r2——隨機(jī)數(shù),r2∈(0,1);
UB——上界;
LB——下界。
數(shù)學(xué)優(yōu)化器概率計(jì)算如式(3)所示。
[MOP(t)=1-t1αT1α] (3)
式中: α——敏感參數(shù),定義迭代過程中局部開發(fā)精度,值為5。
3) 開發(fā)階段:利用加法和減法運(yùn)算實(shí)現(xiàn)局部開發(fā),更新在局部區(qū)域的精確性。
[X(t+1)=Xb(t)-MOP?(UB-LB)?φ+LB r3<0.5Xb(t)+MOP?(UB-LB)?φ+LB r3≥0.5] (4)
式中: r3——隨機(jī)數(shù),r3∈(0,1)。
1.2 變分模態(tài)分解(VMD)基本原理
VMD是基于維納濾波、希爾伯特變換和頻率混合所形成的一種將信號(hào)[f(t)]分解成一系列的模態(tài)分量(Intrinsic Mode Function,IMF)的過程。通過構(gòu)造并求解約束變分問題將原始信號(hào)[f(t)]分解為k個(gè)IMF分量,保證分解序列為具有中心頻率的有限帶寬的模態(tài)分量,同時(shí)各模態(tài)的估計(jì)帶寬之和最小,約束條件為所有模態(tài)之和與原始信號(hào)相等,實(shí)現(xiàn)信號(hào)頻帶的自適應(yīng)分解。其中,為求解約束變分問題引入懲罰因子β拉格朗日乘數(shù)算子,使問題變成無約束變分問題[12]。k和β為VMD分解中的兩個(gè)關(guān)鍵參數(shù)。
1.3 雙向長(zhǎng)短期記憶網(wǎng)絡(luò)(BiLSTM)基本原理
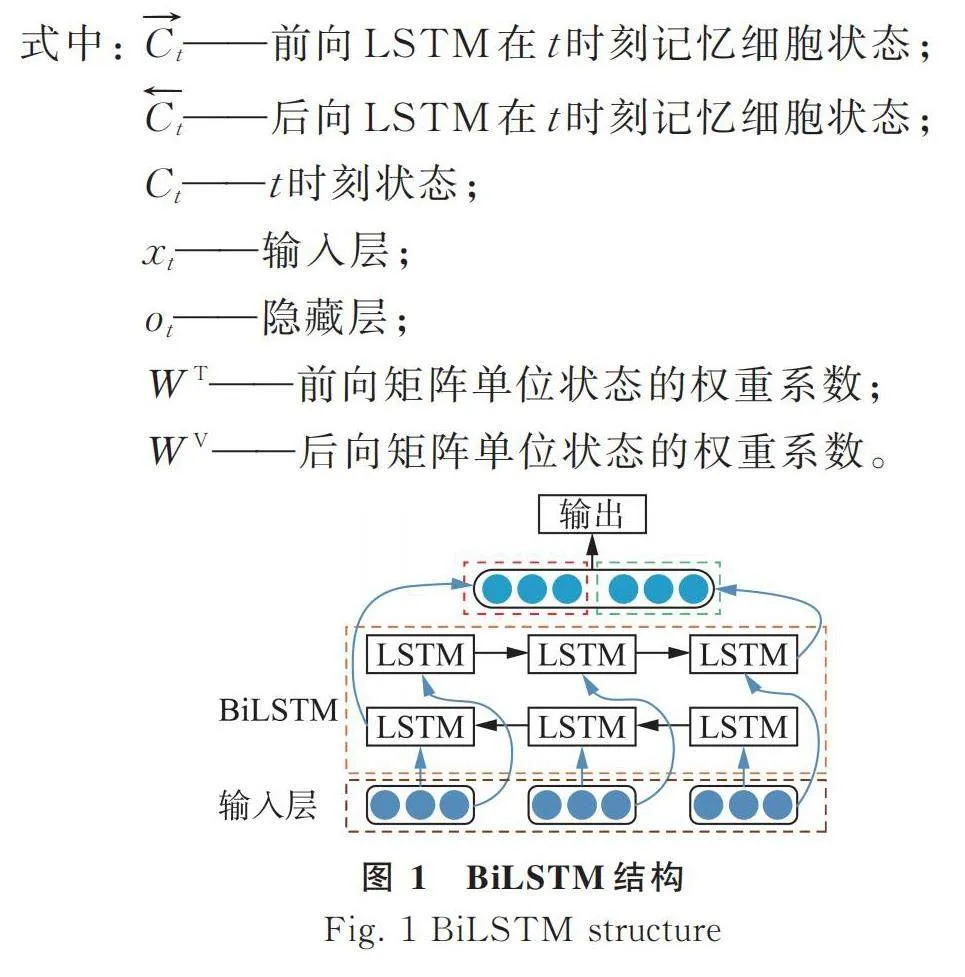
BiLSTM是兩個(gè)不同方向的LSTM組合而成,隱含層包含兩個(gè)具有相同輸入并連接到相同輸出的單元,其中一個(gè)處理向前的時(shí)間序列,另一個(gè)處理向后的時(shí)間序列[13?15]。LSTM網(wǎng)絡(luò)由遺忘門、輸入門和輸出門3個(gè)特殊結(jié)構(gòu)門組成,這三個(gè)門利用特定的tanh網(wǎng)絡(luò)層來實(shí)現(xiàn)信息的傳遞,其具體步驟可參考文獻(xiàn)[16, 17]。本文以BiLSTM為模型核心,對(duì)松土齒耙應(yīng)力應(yīng)變信號(hào)經(jīng)VMD分解后重構(gòu)的信號(hào)進(jìn)行雙向更新遞推,針對(duì)松土齒4種工況進(jìn)行迭代訓(xùn)練。BiLSTM網(wǎng)絡(luò)結(jié)構(gòu)如圖1所示。
[Ct=LSTM(xt,ot-1,Ct-1)] (5)
[Ct=LSTM(xt,ot-1,Ct-1)] (6)
[Ct=WTCt+WVCt] (7)
式中: [Ct]——前向LSTM在t時(shí)刻記憶細(xì)胞狀態(tài);
[Ct]——后向LSTM在t時(shí)刻記憶細(xì)胞狀態(tài);
Ct——t時(shí)刻狀態(tài);
xt——輸入層;
ot——隱藏層;
[WT]——前向矩陣單位狀態(tài)的權(quán)重系數(shù);
[WV]——后向矩陣單位狀態(tài)的權(quán)重系數(shù)。
2 松土齒耙工況分析及試驗(yàn)設(shè)計(jì)
2.1 工作流程
滾筒式殘膜回收機(jī)在收膜作業(yè)過程中,松土齒耙疏松土壤,減小挑膜齒入土阻力,以便于挑膜滾筒完成收膜工作,松土齒耙與挑膜滾筒裝配相對(duì)位置如圖2所示。由于作業(yè)環(huán)境的不確定性,松土齒耙會(huì)產(chǎn)生壅土現(xiàn)象,松土齒與挑膜滾筒相對(duì)距離較窄,因此該現(xiàn)象會(huì)導(dǎo)致殘膜、土壤與挑膜齒發(fā)生干涉,導(dǎo)致收膜率下降、松土齒耙負(fù)載增大、使用壽命嚴(yán)重下降等問題。
2.2 壅土現(xiàn)象
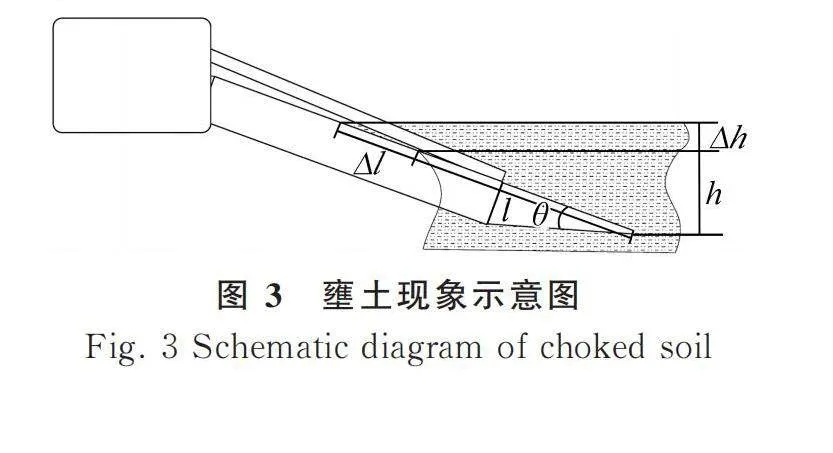
圖3為壅土現(xiàn)象示意圖,h為實(shí)際入土深度;θ為松土齒耙與地面的角度;l為入土深度土壤在松土齒上的相應(yīng)位置;?l為壅土后土壤在松土齒上的變化量;?h為壅土后土壤堆積變化量。其中l(wèi)可以表達(dá)為
[l=hsinθ] (8)
壅土現(xiàn)象主要為單邊壅土、中間部位壅土和整體壅土,其中單邊壅土和中間部位壅土為輕度壅土,整體壅土為嚴(yán)重壅土。
2.3 松土齒耙有限元分析及檢測(cè)位置
機(jī)具正常作業(yè)時(shí),勻速行駛,松土齒耙勻速向前松土,松土齒插入地面80 mm以下主要承受土壤阻力和土壤對(duì)機(jī)具的支撐力。整機(jī)按照2 t計(jì)算,而機(jī)具作業(yè)時(shí)80%的力作用在松土齒上,所以施加在松土齒上機(jī)具重力的反作用力為16 kN,整機(jī)共計(jì)11 根松土齒,每一根松土齒承受1 454 N的支撐力;新疆地區(qū)耕地土壤多為輕壤、輕中壤及中壤土質(zhì),其中中壤比阻為60 kPa,根據(jù)土壤比阻計(jì)算式可得松土齒所受的土壤阻力F,有
[K=Fηab] (9)
式中: K——土壤比阻,kPa;
η——犁耕效率,取0.7;
a——單個(gè)入土部件耕深,m;
b——單鏵幅寬,m。
取土壤比阻K=60 kPa,耕深a=0.08 m,寬度b=0.02 m,計(jì)算出F=0.067 2 kN。
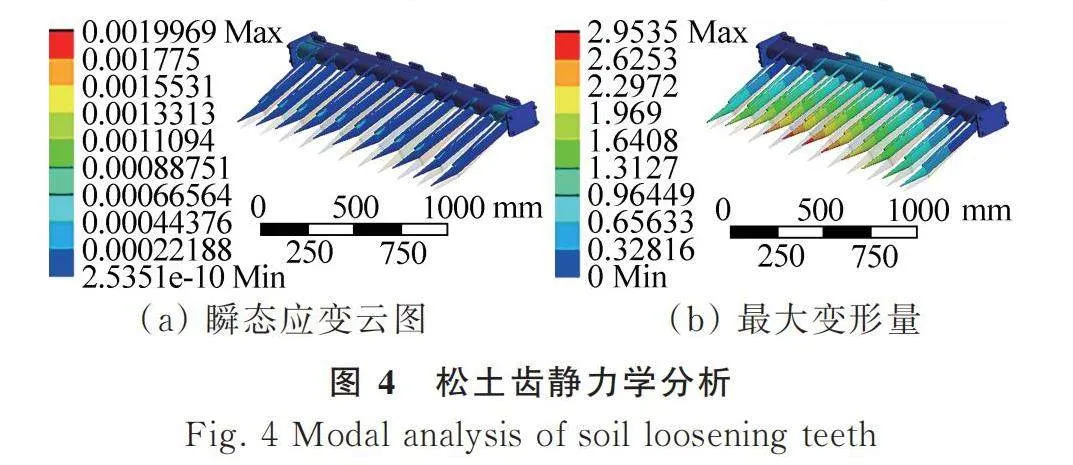
用ANSYS對(duì)松土齒耙進(jìn)行靜力學(xué)特性分析,材質(zhì)施加條件為Q235普通碳鋼,施加約束在橫梁兩側(cè)端板,對(duì)松土齒尖施加支撐力和土壤阻力,結(jié)果如圖4所示。
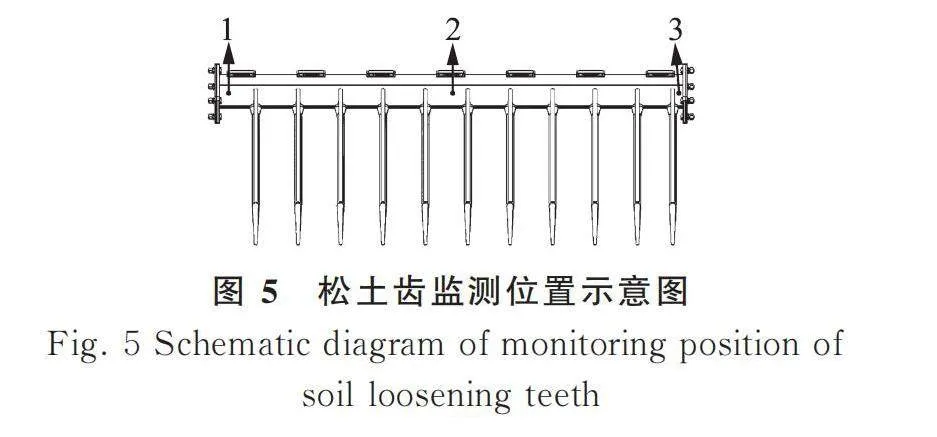
從圖4可知,在正常工作狀態(tài)下,松土齒耙橫梁的中間部位變形最大,達(dá)到0.65 mm;橫梁與兩側(cè)連接板相連附近部位瞬態(tài)應(yīng)變最大,為機(jī)具的應(yīng)變敏感點(diǎn)。在土槽試驗(yàn)中試驗(yàn)條件有限,因此將應(yīng)變片安裝在松土齒橫梁中間部位以及與兩側(cè)連接處,以上三處做為松土齒耙的應(yīng)變監(jiān)測(cè)點(diǎn),其中中間產(chǎn)生最大變形部位作為輔助監(jiān)測(cè)點(diǎn),應(yīng)變監(jiān)測(cè)點(diǎn)位置如圖5所示。
2.4 試驗(yàn)條件和應(yīng)變數(shù)據(jù)的獲取
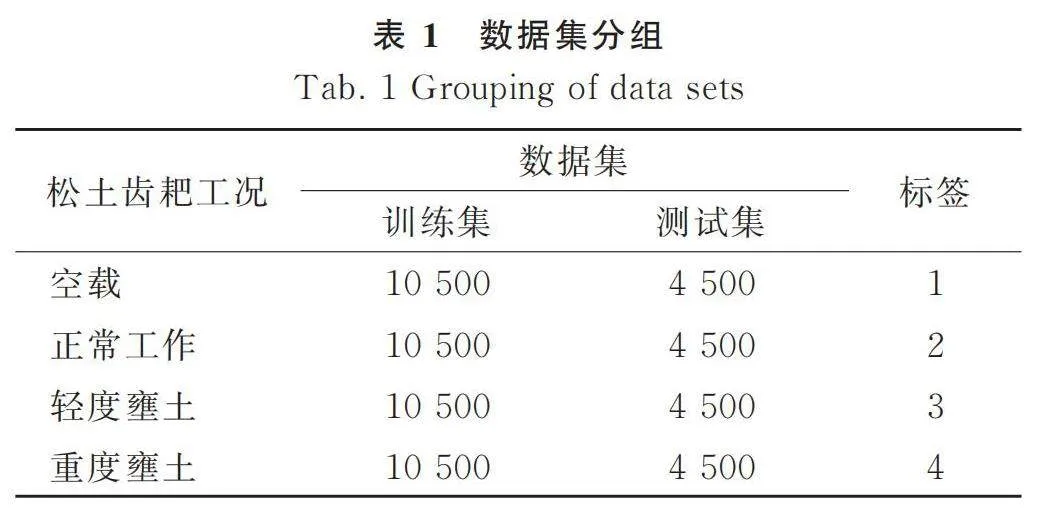
通過對(duì)松土齒耙應(yīng)變信號(hào)判斷其工況,于新疆農(nóng)業(yè)大學(xué)智能農(nóng)業(yè)裝備重點(diǎn)實(shí)驗(yàn)室進(jìn)行場(chǎng)地試驗(yàn),采集儀器為DH5922N動(dòng)態(tài)信號(hào)測(cè)試分析儀,傳感器為電阻式應(yīng)變片,軟件為DHDAS動(dòng)態(tài)信號(hào)采集分析系統(tǒng),動(dòng)力設(shè)備為智能型土壤—機(jī)器—植物系統(tǒng)技術(shù)平臺(tái)。人工設(shè)置松土齒耙空載、正常運(yùn)行、輕度壅土、重度壅土4種工況,采集過程中采樣頻率為10 kHz,入土深度為80 mm,采樣時(shí)間為10 s,分別采集各狀態(tài)下10組,每組數(shù)據(jù)長(zhǎng)度為10 000。
每種狀態(tài)的數(shù)據(jù)通過分析軟件導(dǎo)出Excel文件,在連續(xù)時(shí)間范圍內(nèi),每個(gè)監(jiān)測(cè)點(diǎn)均勻的取5 000個(gè)數(shù)據(jù)不重復(fù)的數(shù)據(jù)點(diǎn),因此,每一種狀態(tài)原始數(shù)據(jù)有15 000個(gè)原始數(shù)據(jù)點(diǎn),通過重構(gòu)后數(shù)據(jù)點(diǎn)不會(huì)改變,4種狀態(tài)下新的樣本數(shù)據(jù)集有4×3×5 000=60 000個(gè)數(shù)據(jù)點(diǎn),分別對(duì)數(shù)據(jù)打上標(biāo)簽,打亂所有樣本按照7∶3的比例劃分訓(xùn)練集和測(cè)試集。數(shù)據(jù)集參數(shù)如表1所示。
3 建立工況識(shí)別模型
3.1 AOA優(yōu)化VMD
采用AOA算法對(duì)VMD的參數(shù)[[k,α]]作為位置更新,以包絡(luò)熵最小值為適應(yīng)度函數(shù),包絡(luò)熵代表原始信號(hào)的稀疏特性,當(dāng)IMF中噪聲較少時(shí),特征信息就越多,則包絡(luò)熵值較小,反之,則包絡(luò)熵值越大。最后通過優(yōu)化計(jì)算出適合不同監(jiān)測(cè)點(diǎn)信號(hào)的變分模態(tài)分解的模態(tài)個(gè)數(shù)[k]和懲罰因子[α]。通過多次試驗(yàn),選取種群數(shù)量100,迭代次數(shù)為20次,下邊界為[0,1],上邊界為[3 600,10]。
3.2 AOA-VMD-BiLSTM松土齒耙工況識(shí)別模型
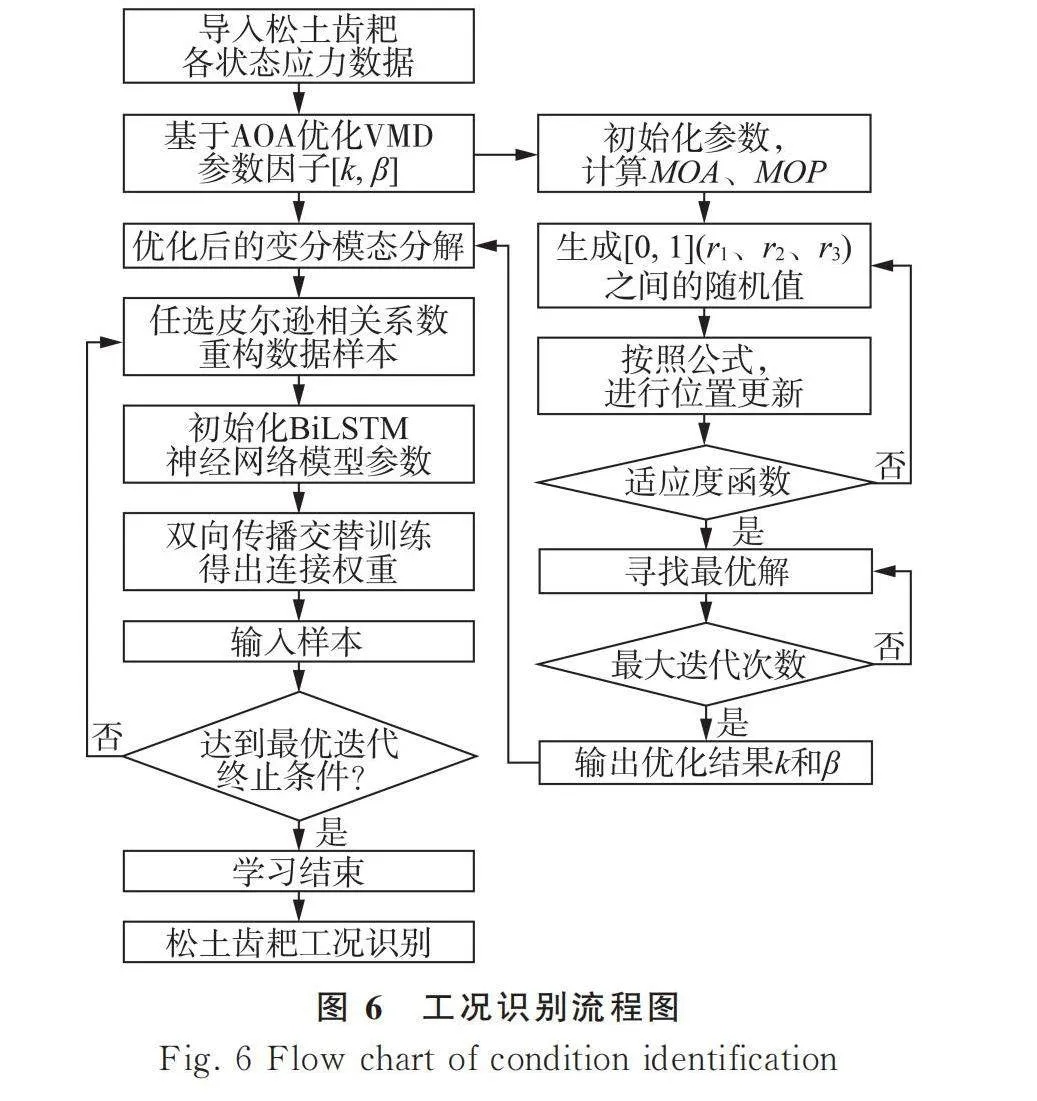
由于松土齒耙受到的土壤阻力不均勻、齒耙自身振動(dòng)以及殘膜回收機(jī)的整機(jī)振動(dòng)等因素影響,松土齒耙的壅土故障信號(hào)難以提取,建立了一種基于AOA優(yōu)化的VMD和BiLSTM模型的松土齒耙壅土工況識(shí)別模型,其工況識(shí)別流程如圖6所示。
1) 模擬不同工況,利用DH5922N動(dòng)態(tài)信號(hào)測(cè)試分析儀對(duì)松土齒耙三個(gè)監(jiān)測(cè)點(diǎn)的應(yīng)變信號(hào)進(jìn)行采集,將應(yīng)變代數(shù)值數(shù)據(jù)通過式(10)轉(zhuǎn)換為應(yīng)力值獲得樣本信號(hào)。
[ε'=σE] (10)
式中: σ ——應(yīng)力,MPa;
E——彈性模量,松土齒為普通碳鋼,值為220 GPa;
[ε']——應(yīng)變。
2) 選取算數(shù)優(yōu)化算法優(yōu)化后的k值和α值,優(yōu)化后的VMD將松土齒耙不同狀態(tài)下3個(gè)監(jiān)測(cè)點(diǎn)下信號(hào)f(t)分解成共3k個(gè)具有不同特征的穩(wěn)定信號(hào)IMF1(1),…,IMF1(k),IMF2(1),…,IMF2(k),IMF3(1),…,IMF3(k)。
3) 設(shè)置閾值,根據(jù)皮爾遜系數(shù),將每個(gè)通道中與原始信號(hào)強(qiáng)相關(guān)的m個(gè)IMF分量進(jìn)行信號(hào)重構(gòu),組成新的樣本數(shù)據(jù)集,將數(shù)據(jù)集劃分為訓(xùn)練集與測(cè)試集。
4) 構(gòu)建BiLSTM模型,輸入訓(xùn)練數(shù)據(jù),通過調(diào)試參數(shù),獲得性能較好的模型。
5) 通過數(shù)據(jù)集,驗(yàn)證基于AOA優(yōu)化的VMD和BiLSTM神經(jīng)網(wǎng)絡(luò)模型的松土齒耙壅土工況識(shí)別模型的有效性和準(zhǔn)確性。
4 試驗(yàn)結(jié)果與分析
4.1 AOA-VMD試驗(yàn)結(jié)果與分析
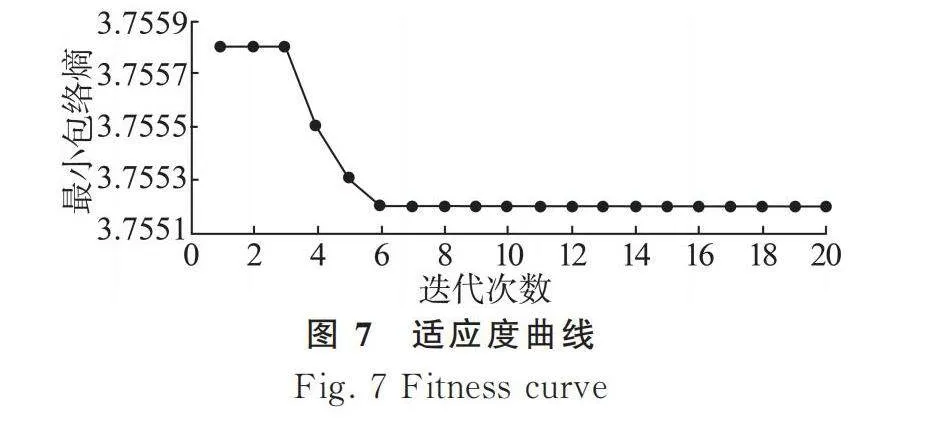
為更好地對(duì)松土齒耙工作狀況做分類,將信號(hào)進(jìn)行降噪處理,使用AOA算法優(yōu)化VMD參數(shù),監(jiān)測(cè)點(diǎn)3為例,適應(yīng)度函數(shù)包絡(luò)熵隨迭代次數(shù)變化曲線如圖7所示。
從圖7可以看出,最小包絡(luò)熵值出現(xiàn)在第6代,之后一直收斂,表明算數(shù)優(yōu)化算法收斂速度很快,全局優(yōu)化能力強(qiáng),適合用于優(yōu)化VMD參數(shù)。
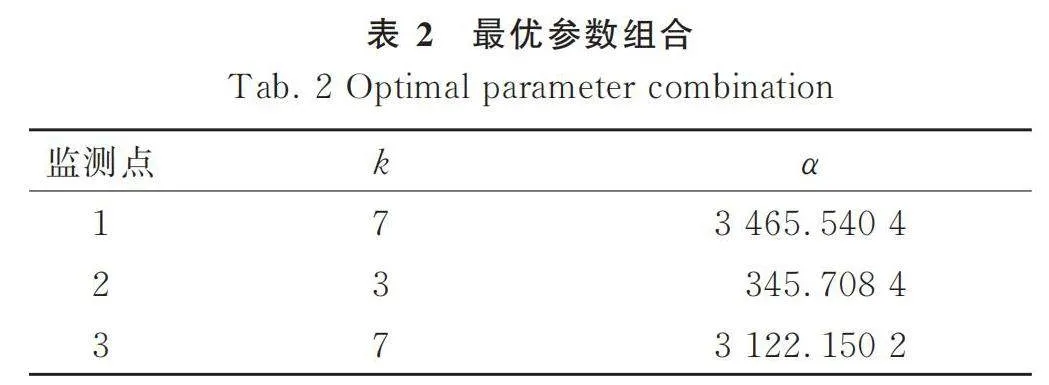
經(jīng)過AOA尋優(yōu)之后得到三個(gè)監(jiān)測(cè)點(diǎn)信號(hào)的最優(yōu)參數(shù)組合如表2所示。
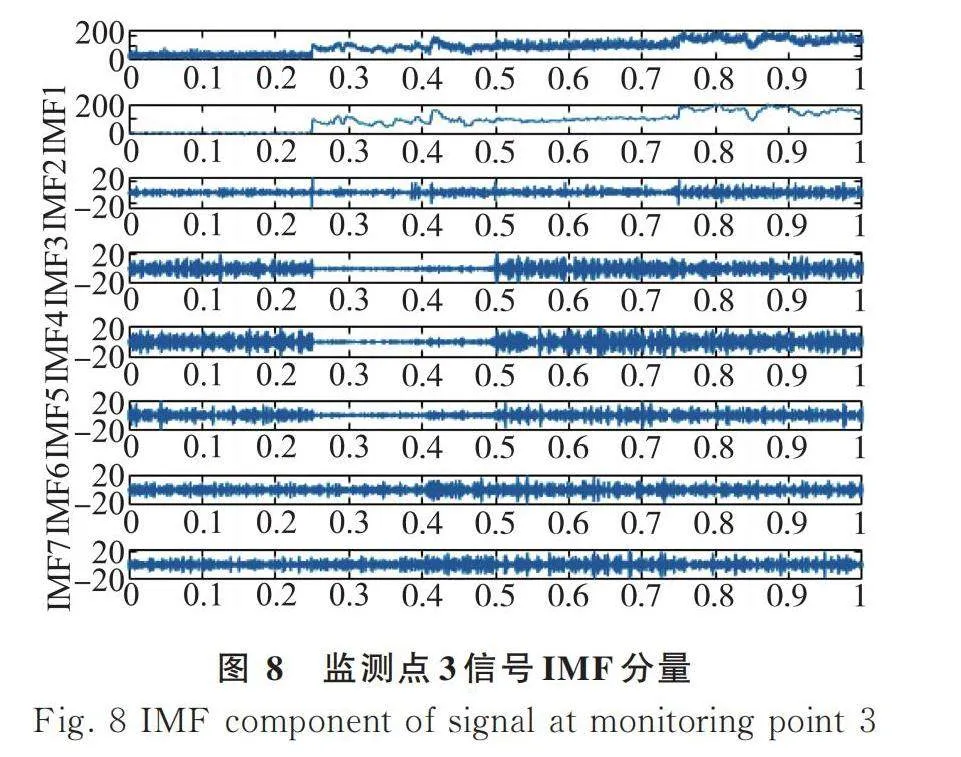
接著將最優(yōu)參數(shù)組合代入VMD,將3個(gè)監(jiān)測(cè)點(diǎn)信號(hào)分解成一系列的具有不同特征的穩(wěn)定信號(hào)IMF,其中對(duì)監(jiān)測(cè)點(diǎn)3的應(yīng)力應(yīng)變數(shù)據(jù)進(jìn)行分析如圖8所示,該監(jiān)測(cè)點(diǎn)得到7個(gè)IMF分量。
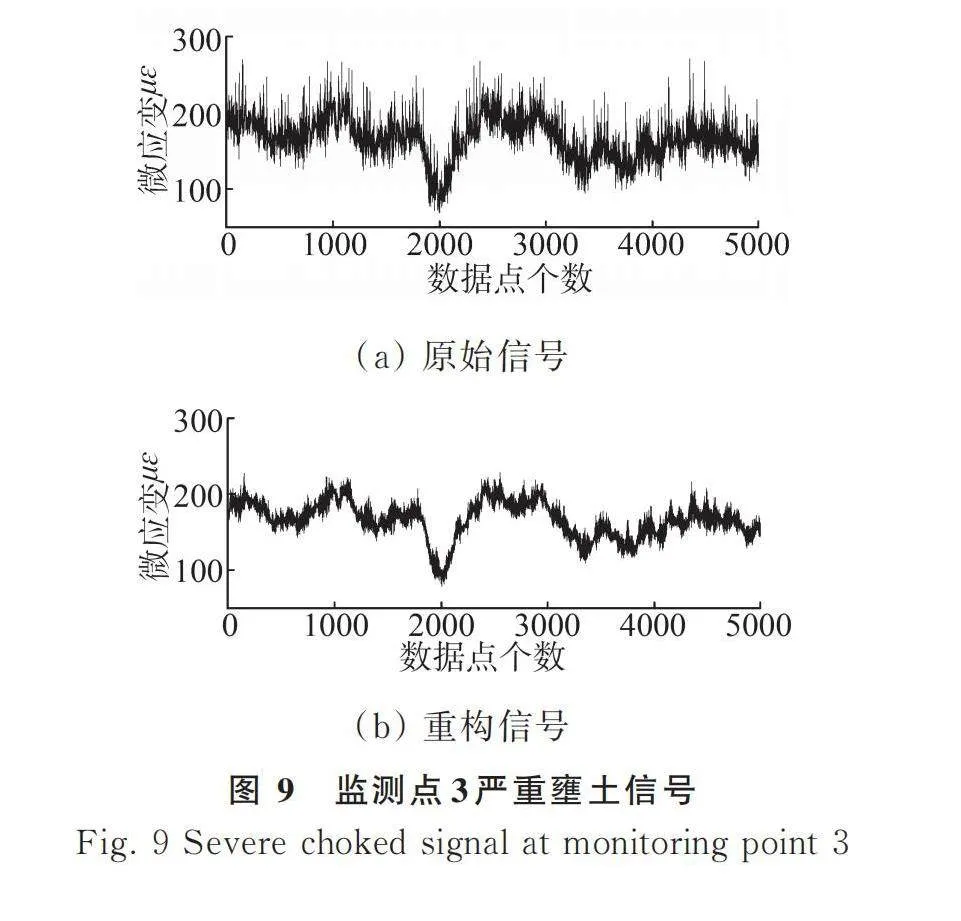
通過皮爾森相關(guān)系數(shù)法分別計(jì)算IMF分量與對(duì)應(yīng)監(jiān)測(cè)點(diǎn)的原始信號(hào)相關(guān)程度,閾值設(shè)置為0.8,將強(qiáng)相關(guān)的IMF分量進(jìn)行信號(hào)重構(gòu),如圖9所示。通過對(duì)比重構(gòu)后的信號(hào)頻率特征更加明顯,說明通過對(duì)強(qiáng)相關(guān)的IMF分量重構(gòu)后的數(shù)據(jù)去除了噪聲部分,對(duì)松土齒耙的運(yùn)行狀態(tài)特征得以保留。
4.2 不同模型訓(xùn)練結(jié)果與分析
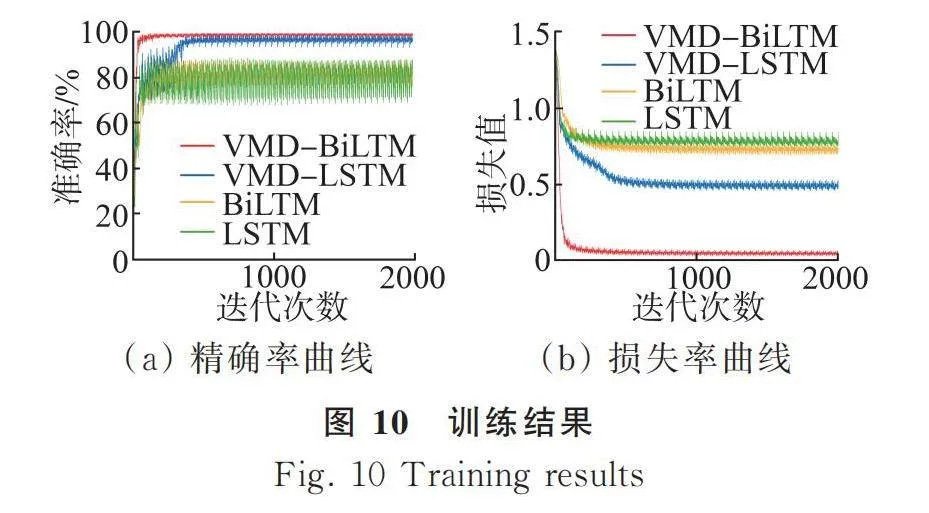
將新的樣本集和原始數(shù)據(jù)集分別導(dǎo)入BiLSTM和LSTM深度學(xué)習(xí)模型中進(jìn)行訓(xùn)練,獲得較好的訓(xùn)練模型,分別對(duì)VMD-BiLSTM、VMD-LSTM、BiLSTM、LSTM模型的訓(xùn)練結(jié)果進(jìn)行對(duì)比分析。選取迭代50輪,作為試驗(yàn)輸出結(jié)果,得到以上4種模型工況識(shí)別方法的準(zhǔn)確率、損失值曲線,其訓(xùn)練曲線如圖10所示。
由圖10(a)可以看出,VMD-BiLSTM模型相對(duì)于其他三種模型,在模型開始收斂迭代時(shí),收斂迅速;經(jīng)200次迭代訓(xùn)練后,該模型的準(zhǔn)確率曲線逐漸趨于穩(wěn)定,并且達(dá)到了較高的準(zhǔn)確率。VMD-LSTM模型在500次迭代訓(xùn)練之前,收斂較為緩慢,并且準(zhǔn)確率有較大的波動(dòng);在此之后曲線整體趨于穩(wěn)定,但較VMD-BiLSTM模型的準(zhǔn)確率較低,且波動(dòng)較為明顯。LSTM與BiLSTM神經(jīng)網(wǎng)絡(luò)模型在150次迭代訓(xùn)練之后出現(xiàn)了很嚴(yán)重的離散現(xiàn)象,準(zhǔn)確率出現(xiàn)了很不穩(wěn)定的狀態(tài),有很大的波動(dòng),對(duì)結(jié)果判斷造成很大影響,在迭代2 000次以后也沒有更優(yōu)的收斂效果;BiLSTM神經(jīng)網(wǎng)絡(luò)模型相較于LSTM神經(jīng)網(wǎng)絡(luò)模型,準(zhǔn)確率高出幾個(gè)百分點(diǎn),波動(dòng)幅度也較小。
由圖10(b)可以看出,4種模型在500次迭代訓(xùn)練后都趨于穩(wěn)定;VMD-BiLSTM模型在200次迭代訓(xùn)練后,損失值基本達(dá)到0,收斂結(jié)果比較穩(wěn)定;VMD-LSTM模型收斂較緩慢,500次迭代訓(xùn)練之后才趨于穩(wěn)定,損失值在0.5波動(dòng),損失值較大;BiLSTM和LSTM模型的損失值比較接近,比其他兩種模型要大的多,導(dǎo)致對(duì)結(jié)果的準(zhǔn)確性降低。
綜上可得,VMD-BiLSTM和VMD-LSTM對(duì)復(fù)雜的信號(hào)能夠達(dá)到比較好的處理效果,有較高的準(zhǔn)確率,且前者較于后者,有更快的收斂速度、更好的收斂穩(wěn)定性和更高的準(zhǔn)確率。
4.3 不同模型工況識(shí)別結(jié)果對(duì)比
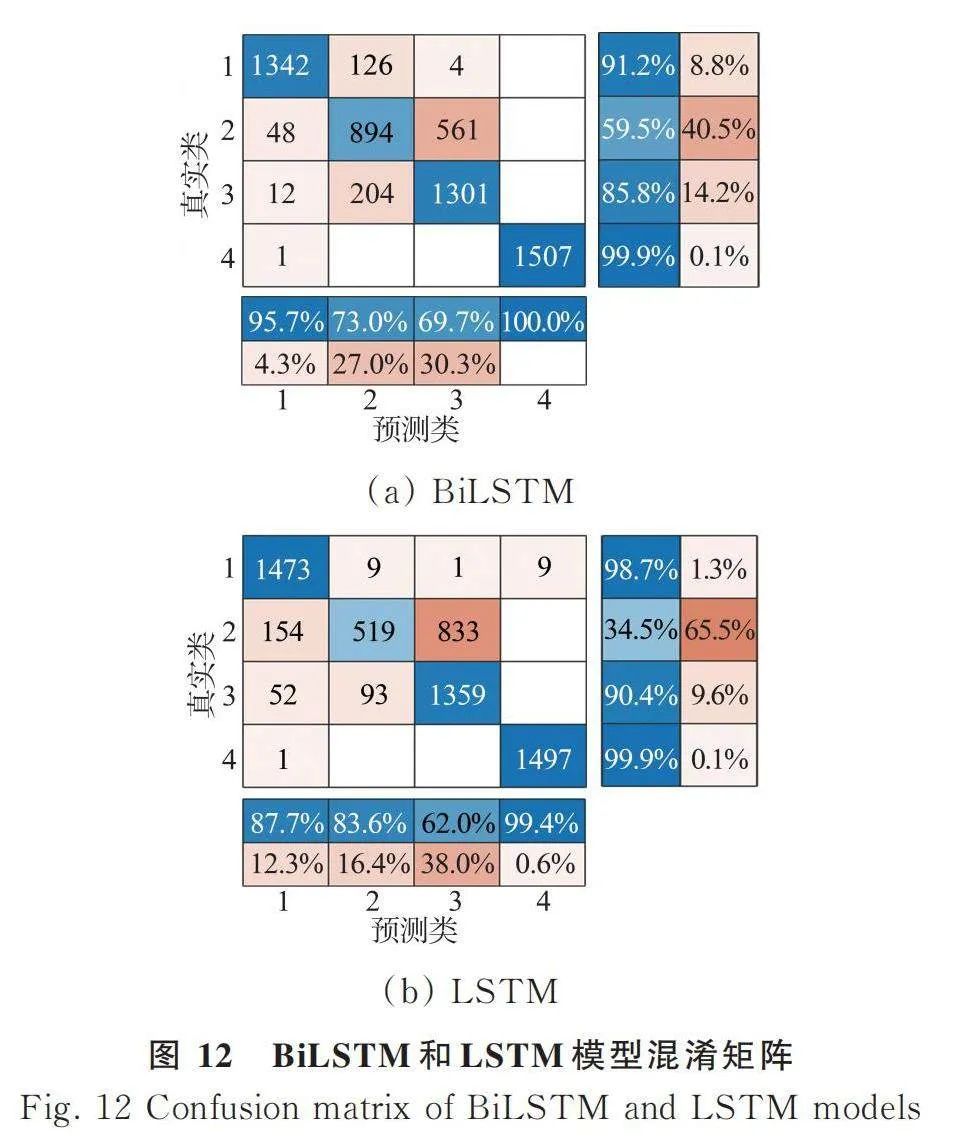
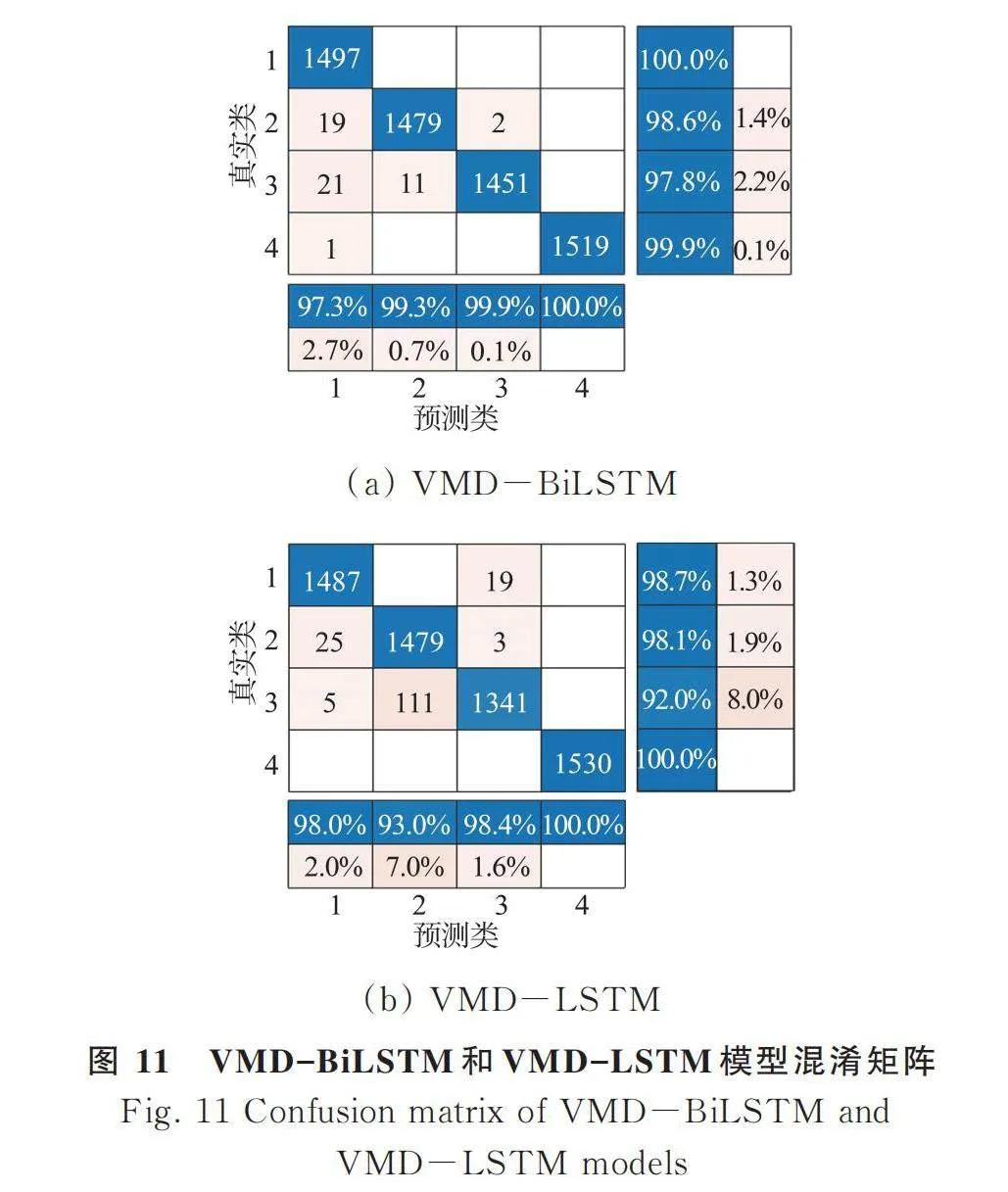
為了驗(yàn)證模型能夠更全面地反映松土齒耙的工作狀態(tài)的識(shí)別情況,將測(cè)試集輸入4種模型,并輸出混淆矩陣,混淆矩陣如圖11、圖12所示。
由圖11可以看出,3個(gè)檢測(cè)點(diǎn)分別采集松土齒耙在空載運(yùn)行、輕度壅土、嚴(yán)重壅土4種不同情況下的3組特征數(shù)據(jù),將數(shù)據(jù)分解、重構(gòu)組成樣本數(shù)據(jù),利用VMD-BiLSTM模型訓(xùn)練結(jié)果的總體準(zhǔn)確率為99.1%。導(dǎo)入相同數(shù)據(jù)集,通過VMD-LSTM模型訓(xùn)練結(jié)果總體準(zhǔn)確率為97.3%,從結(jié)果來看,該模型在正常運(yùn)行狀態(tài)和輕度壅土有著不完全識(shí)別的情況,效果略差于VMD-BiSTM模型。由圖12可以看出,樣本數(shù)據(jù)為三個(gè)特征數(shù)據(jù)的原始數(shù)據(jù),分別導(dǎo)入BiLSTM模型和LSTM模型,前者訓(xùn)練結(jié)果的總體準(zhǔn)確率為84.1%,后者訓(xùn)練結(jié)果的總體準(zhǔn)確率為80.8%,從結(jié)果來看LSTM在正常狀態(tài)下的識(shí)別效果更差,有65.5%的數(shù)據(jù)被識(shí)別為空載狀態(tài)和輕度壅土,尤其被識(shí)別為輕度壅土占較大比例。從4個(gè)混淆矩陣圖中可以得到,本研究所提出的工況識(shí)別模型對(duì)松土齒耙工作狀態(tài)的識(shí)別準(zhǔn)確率有大幅度提高,具有更好的狀態(tài)識(shí)別性能。
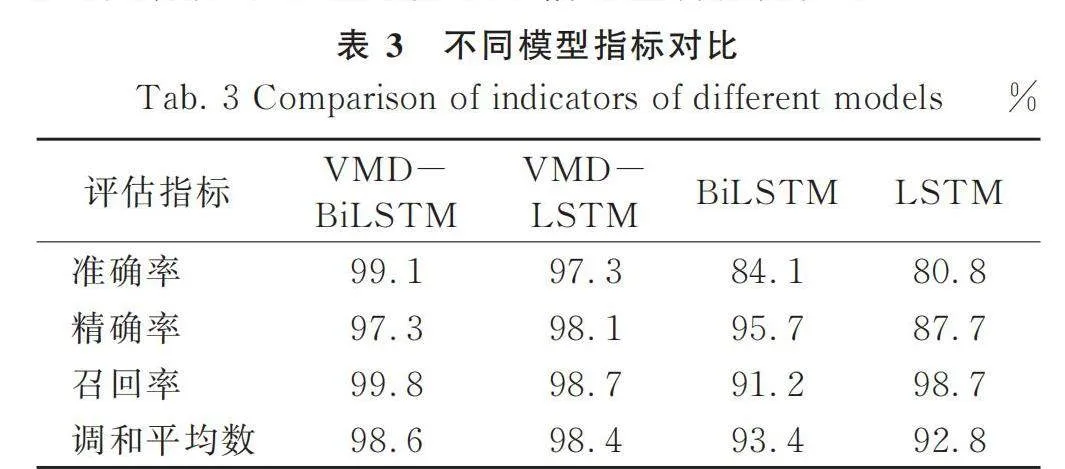
表3分別表示了基于同一數(shù)據(jù)集,利用上述4種不同診斷模型對(duì)松土齒耙不同工作狀態(tài)數(shù)據(jù)訓(xùn)練結(jié)果進(jìn)行對(duì)比分析,可以明顯得出,VMD-BiLSTM工況識(shí)別模型在各項(xiàng)性能指標(biāo)中均達(dá)到97.3%以上,且明顯優(yōu)于其他3種模型,該方法實(shí)現(xiàn)了松土齒耙空載、正常運(yùn)行、輕度壅土和重度壅土信號(hào)的智能分類。
5 結(jié)論
1) 針對(duì)滾筒式殘膜回收機(jī)關(guān)鍵部件松土齒耙應(yīng)變信號(hào)的特點(diǎn),提出一種基于算數(shù)優(yōu)化算法優(yōu)化變分模態(tài)分解和雙向長(zhǎng)短時(shí)記憶網(wǎng)絡(luò)的松土齒耙工況識(shí)別方法,試驗(yàn)結(jié)果表明,該方法能夠準(zhǔn)確地識(shí)別松土齒耙空載、正常運(yùn)行、輕度壅土、嚴(yán)重壅土4種工況類型,總體準(zhǔn)確率達(dá)到99.1%以上。
2) 基于松土齒耙的應(yīng)變數(shù)據(jù)集,分別利用VMD-BiLSTM模型、VMD-LSTM模型、BiLSTM模型、LSTM模型對(duì)同一松土齒耙數(shù)據(jù)集進(jìn)行訓(xùn)練,結(jié)果表明:VMD-BiLSTM模型、VMD-LSTM模型在工況識(shí)別精度上由于BiLSTM和LSTM神經(jīng)網(wǎng)絡(luò)模型,其中LSTM網(wǎng)絡(luò)模型識(shí)別效率最差;VMD-BiLSTM模型相較于VMD-LSTM模型提高1.8%,相較于BiLSTM模型提高15%,相較于LSTM模型提高18.3%,證明該方法的有效性。
參 考 文 獻(xiàn)
[ 1 ] Luo Jianqing, Wen Guangrui, Lei Zihao, et al. Weak signal enhancement for rolling bearing fault diagnosis based on adaptive optimized VMD and SR under strong noise background [J]. Measurement Science and Technology, 2023, 34: 064001.
[ 2 ] Li Hong, Chu Lixin, Lu Jingyi, et al. SVD-VMD algorithm and its application in leak detection of natural gas pipeline [J]. Petroleum Science and Technology, 2022, 41(2): 230-255.
[ 3 ] 許佳, 胡建村, 秦慈偉, 等. 基于參數(shù)優(yōu)化VMD和散布熵的高壓油泵故障診斷[J]. 內(nèi)燃G+8NLHHApihTamNNbHlwrQ==機(jī)學(xué)報(bào), 2023, 41(2): 166-174.
[ 4 ] 蔣田勇, 喻晨宇, 黃可, 等. 基于AO算法優(yōu)化VMD參數(shù)聯(lián)合小波閾值的橋梁信號(hào)去噪方法[J]. 中國(guó)公路學(xué)報(bào), 2023, 36(7): 158-168.
[ 5 ] 郭梓良, 郝如江, 楊文哲, 等. 優(yōu)化VMD和改進(jìn)殘差網(wǎng)絡(luò)的齒輪箱故障診斷研究[J/OL]. 機(jī)械科學(xué)與技術(shù), 1-7[2023-04-16].
[ 6 ] Mohamed S N, Bouteraa N, Redjati A, et al. A novel method for bearing fault diagnosis based on BiLSTM neural networks [J]. The International Journal of Advanced Manufacturing Technology, 2023, 125(3-4): 1477-1492.
[ 7 ] Yang Wenbiao, Xia Kewen, Fan Shurui. Oil logging reservoir recognition based on TCN and SA-BiLSTM deep learning method [J]. Engineering Applications of Artificial Intelligence, 2023, 121: 105950.
[ 8 ] 余萍, 趙康, 曹潔. 基于優(yōu)化A-BiLSTM的滾動(dòng)軸承故障診斷[J/OL]. 吉林大學(xué)學(xué)報(bào)(工學(xué)版), 1-10[2023-04-16].
[ 9 ] 高超, 劉澤輝, 曹棟, 等. 基于1DCNN-BiLSTM的電力電纜故障診斷[J]. 鄭州大學(xué)學(xué)報(bào)(工學(xué)版), 2023, 44(5): 86-92.
[10] 劉子旭, 劉德平. 基于SSA-VMD和BiLSTM的刀具磨損狀態(tài)識(shí)別[J]. 組合機(jī)床與自動(dòng)化加工技術(shù), 2023(1): 119-123.
[11] Abualigh L, Diabat A, Mirjalili S, et al. Thearithmetic optimization algorithm [J]. Computer Methods in Applied Mechanics and Engineering, 2021, 376: 113609.
[12] 軒夢(mèng)輝, 趙思夏, 徐立友, 等. 改進(jìn)VMD和LSTM的聯(lián)合收割機(jī)裝配質(zhì)量檢測(cè)方法[J]. 中國(guó)農(nóng)機(jī)化學(xué)報(bào), 2023, 44(3): 132-140.
Xuan Menghui, Zhao Sixia, Xu Liyou, et al. Assembly quality inspection method of combine harvester based on improved VMD and LSTM [J]. Journal of Chinese Agricultural Mechanization, 2023, 44(3): 132-140.
[13] 魏佳恒, 郭惠勇. 基于貝葉斯優(yōu)化BiLSTM模型的輸電塔損傷識(shí)別[J]. 振動(dòng)與沖擊, 2023, 42(1): 238-248.
[14] 李懷東, 吳騰. 基于BiLSTM和多分支CNN的心律失常自動(dòng)分類[J]. 機(jī)械制造與自動(dòng)化, 2022, 51(6): 102-105.
[15] 唐貴基, 周威, 王曉龍, 等. 基于變維GRU-BiLSTM神經(jīng)網(wǎng)絡(luò)模型的滾動(dòng)軸承壽命預(yù)測(cè)[J]. 中國(guó)工程機(jī)械學(xué)報(bào), 2022, 20(6): 498-503.
[16] Hochreiter S, Schmidhuber J. Long short?term memory [J]. Neural Computation, 1997, 9 (8) : 1735-1780.
[17] Graves A. Supervised sequence labeling with recurrent neural networks [M]. Heidelberg: Springer, 2012: 35-42.
 中國(guó)農(nóng)機(jī)化學(xué)報(bào)2024年11期
中國(guó)農(nóng)機(jī)化學(xué)報(bào)2024年11期
- 中國(guó)農(nóng)機(jī)化學(xué)報(bào)的其它文章
- 科技創(chuàng)新驅(qū)動(dòng)鄉(xiāng)村振興的作用機(jī)制與實(shí)證分析
- 數(shù)字化轉(zhuǎn)型對(duì)農(nóng)業(yè)企業(yè)全要素生產(chǎn)率的賦能效應(yīng)
- 農(nóng)業(yè)社會(huì)化服務(wù)對(duì)農(nóng)業(yè)面源污染的影響研究
- 江蘇縣域富民產(chǎn)業(yè)高質(zhì)量發(fā)展的路徑研究
- 廣西農(nóng)業(yè)經(jīng)濟(jì)增長(zhǎng)的時(shí)空特征與影響因素研究
- 新農(nóng)科新文科背景下農(nóng)林經(jīng)濟(jì)管理專業(yè)虛擬仿真實(shí)驗(yàn)設(shè)計(jì)與應(yīng)用效果研究