茭白生產機械化發展現狀與對策
2024-11-12 00:00:00費焱王濤崔志超李怡鵬樓婷婷楊夢飛
中國農機化學報 2024年11期

摘要:提高機械化水平是茭白產業破解“人力成本高”和“用工荒”難題,實現高質量發展的重要途徑。目前茭白產業除耕整地、田間管理環節有少部分裝備和機具可用外,種植、采收等關鍵環節均無機可用,機械化水平相較水稻、玉米等大宗作物大大落后。指出茭白機械化發展仍存在作業環境惡劣,通用機械不適用;植株特性復雜,關鍵技術難突破;栽培模式多樣,農機農藝融合差;相對市場較小,資金技術支撐弱等問題。基于此,提出推進“以地宜機”和“以機宜地”、加快核心關鍵技術攻關,加強農機農藝融合技術研究、帶動科研院所與企業協同創新的建議,并指出深泥腳動力底盤、自動對行、茭田仿形、田間信息實時監測等關鍵技術,為提升茭白生產機械化水平提供借鑒和參考。
關鍵詞:茭白;機械化生產;農機裝備;農機農藝融合
中圖分類號:S645.2; S233.74 文獻標識碼:A 文章編號:2095?5553 (2024) 11?0278?06
Current status and countermeasures of mechanized developmemt of
Zizania latifolia production
Fei Yan1, Wang Tao1, Cui Zhichao2, Li Yipeng1, Lou Tingting1, Yang Mengfei1
(1. Zhejiang Key Laboratory of Characteristic Aquatic Vegetable Breeding and Cultivation, Jinhua Academy of Agricultural Sciences/Zhejiang Institute of Agricultural Machinery, Jinhua, 321051, China; 2. Nanjing Institute of Agricultural Mechanization, Ministry of Agriculture and Rural Affairs, Nanjing, 210014, China)
Abstract: Improving the level of mechanization is an important way to solve the problems of “high labor cost” and “labor shortage” and realize high quality development of Zizania latifolia industry. At present, in addition to a small number of equipment and machinery available in tillage and field management, the key links such as planting, harvesting and other key aspects have no machinery available. The mechanization level of Zizania latifolia is far behind the bulk crops such as rice and maize. It is pointed out that the operating environments is still bad and the general?purpose machinery is unsuitable for the mechanization development of Zizania latifolia, plant characteristics are complex and key technology is difficult to break through, the cultivation patterns are diverse and the integration of agricultural machinery and agronomy is poor, the relative market is small, and the capital and technical support is weak. On the basis of this, suggestions are put forward to promote “suitable land for machines” and “suitable machines for land”, accelerate the research on core key technology, strengthen the research on integration of agricultural machinery and agronomy, and promote the collaborative innovation between scientific research institutes and enterprises. The key technologies such as deep mud foot power chassis, automatic row alignment, Zizania latifoliafield mimicry, and real?time monitoring of field information are also pointed out, which can provide reference for improving the mechanization level for Zizania latifolia production.
Keywords: Zizania latifolia; mechanized production; agricultural equipment; integration of agricultural machinery and agronomy
0 引言
茭白為禾本科菰屬多年生宿根草本植物,是我國特有的水生蔬菜,具有獨特的風味和品質,富含糖、蛋白質、礦物質及氨基酸,兼具食用和藥用價值,主要分布于長江流域及以南地區,在我國是僅次于蓮藕的第二大水生蔬菜。其中,浙江省年種植面積達33 khm2,占全國茭白總栽培面積的40%以上,產量約800 kt,產值逾40億元[1]。茭白產業在農業增效、農民增收、山區消薄共富等方面發揮了重要作用。
茭白生產環節多,作業環境惡劣,勞動強度大,是典型的季節性勞動密集型產業,人工成本占總生產成本的50%以上。近年來隨著勞動力價格的快速上漲,人工成本占總成本的比重越來越高。城市化、人口老齡化及惡劣的作業環境使得產業從業人員以留守老人和婦女為主,缺乏“新鮮血液”的注入。“人工成本高”和“用工荒”矛盾日益突出,影響了茭白的種植產量、產品質量和生產效益,產業存在著萎縮的危機[2]。與傳統人工種植模式相比,機械化生產可提高茭白產業生產效率,降低勞動強度和成本,是產業破解瓶頸、轉變發展方式、實現高質量發展的有效途徑。然而由于機械作業環境惡劣,種植規模普遍偏小等原因,大部分茭白生產環節仍以人工為主,產業機械化發展進程緩慢,提高茭白生產機械化發展程度迫在眉睫。
本文對茭白機械化發展現狀進行綜述,分析當前茭白機械化發展面臨的制約因素及存在的問題,提出相關對策、建議和提高茭白機械化水平的關鍵技術,以期為茭白產業機械化發展提供參考。
1 茭白機械化發展現狀
茭白是我國特色蔬菜種類之一,國外種植茭白的國家和地區極少,故目前國外還沒有茭白機械化和作業裝備的報道。針對茭白作業量大、勞動強度高等問題,國內一些農戶、科研單位和企業對茭白作業裝備進行了初步探索。
1.1 耕整地環節
茭白種植前需要進行耕整地,目的是對茭田旋耕平整的同時,將老茭墩旋碎還田,既能夠疏松土壤,利于茭白根系生長,又能夠消滅躲藏在老茭墩內的害蟲,提高土壤肥力,進而減少化肥和農藥的施用量,降低成本。由于茭田長期蓄水、泥腳深、地塊普遍較小,常用的大型拖拉機掛接旋耕機、鏵式犁等作業機具的水田耕整地形式存在打滑下陷、田間掉頭轉運困難的問題,并不適用于茭田。目前實際生產活動中主要采用微耕機、手扶拖拉機進行茭田耕整地作業,要求人進入茭田操作,由于茭墩較大,需要3遍以上才能將茭墩打碎還田,費時費力。浙江省農業機械研究院聯合浙江挺能勝機械有限公司嘗試采用船型拖拉機進行茭田耕整地作業,不易下陷且效率有所提高,一般只需2遍就可實現茭墩破碎還田,但存在上下田困難的問題,需進一步提升優化。
1.2 種植環節
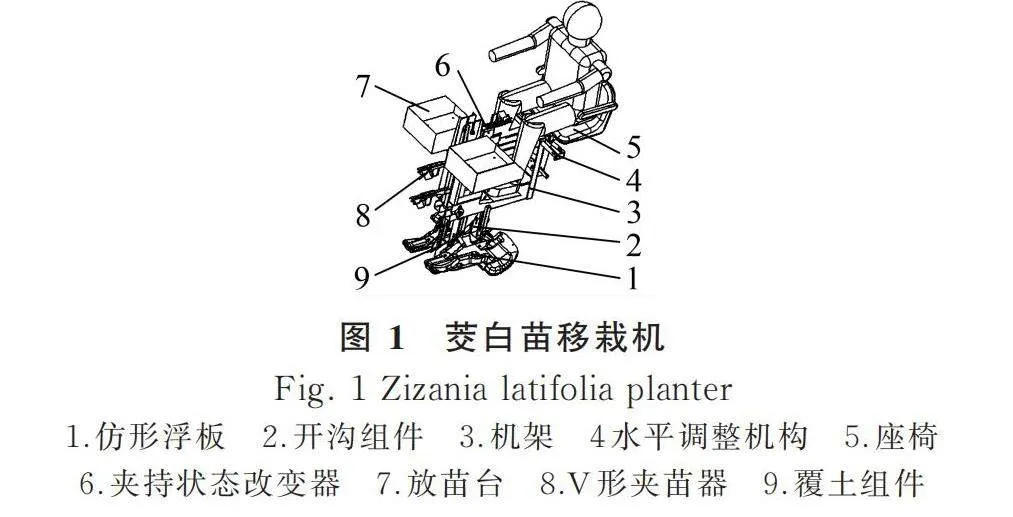
茭白是一種無性繁殖的水生宿根禾本科作物,沒有種子,生產中采用茭墩留種,繁育成茭白苗后定植[3]。與水稻的標準化育苗相比,茭白苗長短、粗細差異明顯,導致機械化種植困難。目前生產實踐中并無機械化種植裝備可用,而是采用人工分株拉線種植,效率低且人力成本高。金華市農業科學研究院對茭白種植機進行了初步的探索,研制了一種茭白苗移栽機,如圖1所示,主要結構包括機架、開溝組件、仿形浮板、覆土組件、V形夾苗器、放苗臺、夾持狀態改變器、座椅和水平調整機構。茭白苗移栽機通過四連桿機構與作業底盤連接,作業時,通過人工從放苗臺中取苗后放入V形夾苗器,經夾持狀態改變器作用,茭白苗先被夾緊,到達直立位置后被松開并投入到由開溝組件形成的溝內,最后由覆土組件完成覆土。水平調整機構可使機架始終處于水平狀態,使茭白苗豎直栽種,仿形浮板實時感知茭田地形,通過拉桿和液壓閥控制四連桿機構升降,保證種植深度。該款茭白苗移栽機采用人工放苗結合機械化送苗、開溝、投苗和覆土的形式,實現了半自動化茭白苗種植[4],但開溝、投苗和覆土這三個關聯環節的銜接配合還不夠完善,立苗率和穩定性有待進一步提高。
1.3 田間管理環節
茭白田間管理環節主要包括施肥、植保、刪苗等。目前,茭農主要采用背負式噴霧器施用化學農藥防治,存在打藥頻次過高、用藥種類混亂、使用劑量過大等問題。岳西縣應用植保無人機開展茭白病蟲害統防統治,達到了減藥增效、解放勞動力、降低污染的良好效果[5]。但由于茭田地塊小,地形復雜,存在飛防服務難度大的問題。傳統刪苗作業需要人工彎腰操作,效率低下且勞動強度大。針對這一問題,臺州市農業科學研究院和臺州市黃巖三昇家庭農場共同研制了可站立操作的背包式茭白刪苗機,如圖2所示,主要由刀頭、傘齒、手柄、開關、動力源、軟軸等組成。作業時,操作人員將動力源背負在身上,通過手柄上的開關控制動力源啟停,動力通過軟軸、傘齒驅動刀頭旋轉開展刪苗作業,刀頭可深入土層下約3 cm,從基部切斷分蘗苗,實現分蘗苗的一次性刪除。該款刪苗機每畝可減少人工3.7個,省時省力,但刪苗機刪苗后還需對茭墩周邊的過密分蘗苗進行人工輔助刪苗[6, 7]。
1.4 收獲環節
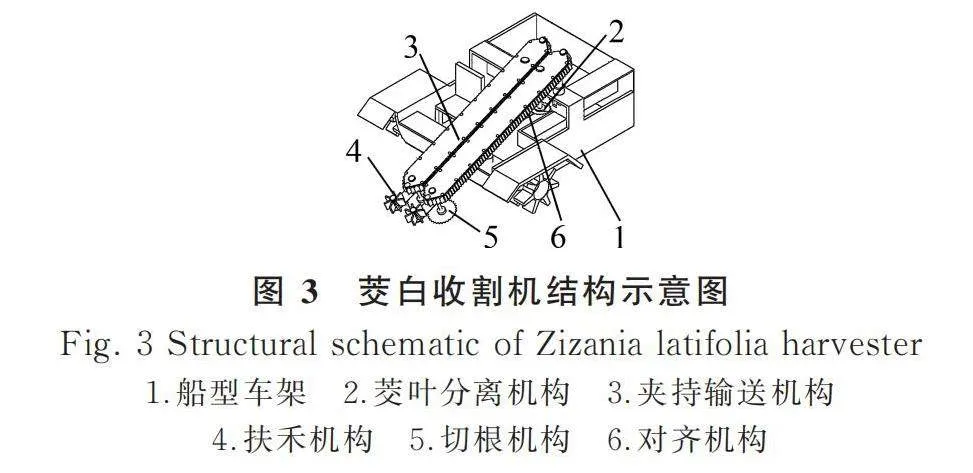
收獲環節是茭白作業中人力成本占比最高的一環,目前人工采收是唯一的方式,對于機械化收獲裝備的研究也只停留在理論階段,并未有樣機的試制和試驗。金華市農業科學研究院設計了一種茭白收割機,如圖3所示,包括船型車架、切根機構、扶禾機構、夾持輸送機構、茭葉分離機構、對齊機構等。作業時,隨著船型車架向前移動,扶禾機構將茭白植株扶起聚攏并導入至夾持輸送機構,同時茭白根部被切根機構切斷,切斷的茭白植株輸送至對齊機構被調整至同一高度后,被莖葉分離機構切除葉片并掉落至收集箱。該種茭白收割機可實現茭白的切根、輸送、莖葉分離和收集[8],但缺少分禾機構會導致較大的茭白株叢漏收。
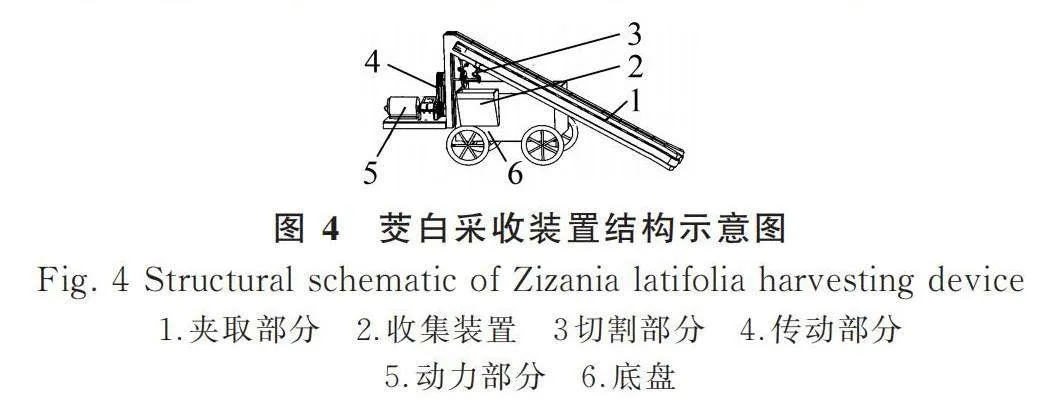
華中農業大學和中國農業大學(煙臺研究院)設計了一種茭白采收裝置,如圖4所示,主要包括底盤、動力部分、傳動部分、夾取部分、切割部分和收集裝置。
該機具工作時,夾取部分將茭白植株從土壤中拔出,經傳送帶輸送至切割部分處將葉子分離后,收集至收集裝置[9]。但該款茭白采收裝置的輪式底盤在茭田中易下陷,且由于茭白為體積較大的叢生植物,拔取的收獲方式較難實現茭白與根部的分離。
2 茭白機械化發展存在問題
目前茭白生產機械化水平相較水稻、玉米等大宗作物大大落后,種植、采收等關鍵環節依舊采用人工作業,在多種因素制約下存在著多方面的問題。
2.1 作業環境惡劣,通用機械難適用
茭田長年蓄水,泥腳多數在30 cm以上,現有通用水田作業底盤由于離地間隙不夠、重量太大及驅動力不足導致深陷打滑而無法作業。其次茭田多分布在丘陵山地,地塊較小且缺少機耕路,導致作業裝備下田、掉頭困難。目前茭白生產環節中,除了耕整地、田間管理等少數環節可采用現有或改進的通用機械外,占人力成本大頭的種植、收獲等環節通用機械都不適用,完全依靠人工,極大限制了茭白產業的發展。
2.2 植株特性復雜,關鍵技術難突破
茭白不同于水稻、小麥等作物,屬無性繁殖,需采用分蘗苗種植,而分蘗苗尺寸差異較大,標準化差,導致傳統水稻、蔬菜機械化種植原理不適用于茭白苗種植作業,需有工作原理和結構形式的創新才能夠實現茭白苗的機械化種植。其次,茭白植株高大,成熟茭白植株能到2 m左右,通用底盤因離地間隙不夠而無法開展植保和撒肥作業,而選用無人機開展作業則易發生事故且難噴施于要求位置。再次,同株茭白成熟時間不同,一茬茭白的采收期長達1個月[10],導致機械化一次性收獲難以實現。
2.3 栽培模式多樣,農機農藝融合差
茭白品種資源豐富,種植模式多樣化,主要可分為高山單季茭、單季茭一種兩收、雙季茭、大棚設施茭四種模式。同時各地開展了不同種植模式和配套栽培技術的研究,如浙江麗水市推廣了茭白與茄子年度間水旱輪作,湖北潛江試驗了茭白一蝦共生種養模式,浙江縉云創新了中低海拔山地單季茭收二茬栽培模式,增產增效成果明顯[11]。然而各地多樣化的栽培模式導致了茭白種植密度、基礎設施、種植規范差異較大,降低了茭白作業裝備的使用效果和適用性,加大了研發難度。以茭白收獲機為例,由于雙季茭白和單季茭白的種植行株距存在較大差別,導致動力底盤和對行切割裝置通用性較差。
2.4 相對市場較小,資金技術支撐弱
茭白作業裝備研發技術難度大,許多關鍵技術都亟待攻克,需要開展大量的設計、試驗和改進工作,投入大量的人力與資金。然而相對于水稻、小麥、玉米等大宗作物的作業裝備,茭白作業裝備尺寸小、質量輕、價格便宜,且市場空間有限,導致投入產出比低。同時茭白作業裝備的研發和推廣缺乏相關政策的支持與資金的扶植,致使科研院所、企業參與的積極性不高,嚴重阻礙了茭白機械化進程。目前,有少部分茭白作業裝備的研究成果,但也由于缺乏資金和技術的支撐僅僅停留在理論和樣機階段,并未投入實際生產活動。
3 茭白機械化發展對策與建議
3.1 推進“以地宜機”和“以機宜地”
引導茭農土地流轉集中,推進種植戶的規模化經營,開展茭田宜機化改造,將小地塊茭田集中連片為大地塊,完善機耕路規劃建設,以適應機械化作業。同時努力發展茭田實用農機裝備,開發適用于茭田復雜地形和深泥腳的通過性能優越的作業底盤及輕簡型的作業機具。通過“以地宜機”和“以機宜地”協同推進,加快提高茭白產業機械化水平[12, 13]。
3.2 加快核心關鍵技術攻關
茭白植株的復雜特性使得研發茭白作業裝備技術難度大,需要投入大量的時間和資金,因此宜采用分環節對待、循序漸進的方式推進茭白產業機械化關鍵核心技術攻關。針對種植環節茭白苗標準化差的問題,可先進行半自動化的種植裝備研發,取苗環節由人工完成,而送苗和種苗環節由機械完成,在此基礎上進一步研究自動化取苗技術;針對茭白植株高大導致機械化植保和撒肥困難的問題,可在適當加高作業底盤離地間隙的基礎上,通過創新植保和撒肥方式及結構,將藥箱和肥箱布置在低位,通過管道、絞龍等方式將藥液和肥料輸送至高位后再噴施出去,在保證整機重心不至過高的同時,將藥液和肥料噴施于要求位置;針對采收期長導致機械化收獲困難的問題,需要農藝技術進行配合,通過選育“宜機化”品種,控制茭白分蘗,縮短采收期,以適應機械化采收。
3.3 加強農機農藝融合技術研究
農機農藝的有效融合是實現生產機械化的內在要求也是必然選擇[14?16]。只有實現茭白生產農機農藝兩者相互協調、彼此交叉、有機融合,才能在真正意義上實現茭白生產機械化。要基于茭白生產現狀,兼顧經濟性和可操作性,從茭田耕整地、品種選擇、分蘗苗定植、田間管理到采收等一系列環節開展農機農藝融合技術研究。培育和篩選出適宜機械化作業的“宜機化”茭白新品種,制定適合機械化生產的技術規范和標準。重視和加強典型示范引導作用,建立農機農藝相結合的試驗示范基地,同時開展農機農藝融合技術培訓。
3.4 帶動科研院所、企業協同創新
政府應適當向以茭白為代表的經濟特色作物農機裝備傾斜,針對性制定促進茭白機械化的農機政策,加大財政投入和政策保障,優化補貼政策,在金融和稅收等方面給予茭白農機企業支持,引導企業參與到茭白機械的研發與生產中來。同時支持當地農機科研院所和企業圍繞地方區域特色產業開展農機裝備創新,將先進適用的茭白作業裝備研發列入各級政府科技項目,以項目資金帶動科研院所和企業進行茭白農機裝備尤其是關鍵作業環節裝備的研發及產業化,降低研發風險,提高科技成果轉化率[17, 18]。
4 提升茭白機械化的關鍵技術
4.1 深泥腳動力底盤技術
動力底盤作為茭白作業裝備的主要部件之一,對作業性能有著很大的影響。茭田具有腳深泥、田塊小的特性,因此,茭田動力底盤應滿足離地間隙高、接地比壓小、通過性能好的、轉彎半徑小的要求,同時又要具備足夠的強度、剛度和良好的動力性。這就要求在開展茭田土壤物理、力學特性,茭田—底盤相互作用關系研究的基礎上,采用模塊化、小型化的設計思路,合理設計行走裝置、車架、動力系統、轉向機構等關鍵部件,集成茭田用深泥腳動力底盤[19, 20]。
4.2 自動對行技術
在茭白刪苗、噴藥、收獲等作業環節,為保證效果都要求對行作業。而實際中的茭田苗帶并非理想中的筆直,要求駕駛員不時調節方向盤來實現對行作業,勞動強度大,且對行的準確度很容易受到人為因素的干擾,難以保證對行作業質量,因此有必要進行自動對行技術的研究[21, 22]。茭白為水生植物,應該以作物行或作物行間區域為基準開展對行路徑檢測方式研究,提出適合茭田的作業機具對行控制方法,研制對行控制系統。
4.3 茭田仿形技術
由于茭田的起伏和底盤行走裝置陷入深度的不同,底盤上的作業部件也會相應發生俯仰和側傾,導致作業質量下降。如茭白苗種植作業時,會導致種植深度的不一致,從而影響茭白苗的存活和分蘗;收獲作業時,會導致切割高度的不一致,導致茭白破損或割刀斷裂。仿形技術能夠自動調整作業部件與底盤的相對位置,提高作業部件對茭田地形的適應能力[23]。相對于由純機械結構組成的被動仿形系統,主動仿形系統更適用于惡劣的茭田環境[24]。宜在充分研究茭田仿形精度和仿形質量要求的基礎上,合理設計傳感機構、升降機構、液壓執行系統,優化控制算法,集成開發茭田仿形系統。
4.4 田間信息實時監測技術
實時監測田間信息能夠為茭白生產決策提供科學依據,能有效提高茭白生產的精細化程度,實現生產資源的高效率、高精度利用,有利于生產由粗放型向精細型的轉變。基于土壤特性、作物生長、病蟲害狀況監測多傳感器融合技術,可以對茭田有機質含量、作物長勢、養分脅迫和病蟲害等信息進行實時監測,在作業時能夠按需調節灌水量、施肥量和施藥量,實現精準變量施肥和噴藥。基于產量、土壤特性等傳感器,可在收獲作業過程中實時檢測產量和土壤肥力,并繪制產量、土壤肥力處方圖,為后期播種、變量施肥、打藥等提供依據。
5 結語
茭白營養豐富,在農業增效、農民增收、山區消薄共富等方面發揮重要作用。“人工成本高”和“用工荒”矛盾制約產業的發展,產業存在著萎縮的風險。作業環境惡劣、植株特性復雜、農機農藝融合差、資金技術缺乏等因素導致茭白產業在耕整地、種植、田間管理、收獲各環節,作業裝備基本處于空白,機械化程度低。應積極推進“以地宜機”和“以機宜地”、加快核心關鍵技術攻關、加強農機農藝融合、鼓勵科研院所和企業協同創新,并突破深泥腳動力底盤、自動對行、茭田仿形、田間信息實時監測等關鍵技術,加快提高產業機械化水平,以破解產業瓶頸,實現茭白產業的高質量發展。
參 考 文 獻
[ 1 ] 周佳燕. 基于SWOT分析的浙江茭白產業發展對策與建議[J]. 長江蔬菜, 2020(16): 34-37.
[ 2 ] 馬常念, 陳耀輝, 馮明慧, 等. 桐鄉市茭白產業現狀、問題及發展對策[J]. 浙江農業科學, 2019, 60(5): 766-768.
[ 3 ] 江德權, 甘宏信, 毛土有, 等. 浙西地區茭白促早高效生態種植技術[J]. 中國蔬菜, 2022(9): 120-122.
[ 4 ] 費焱, 王濤, 李怡鵬, 等. 一種茭白薹管苗移栽機[P]. 中國專利: 202210782314. 6, 2022-07-01.
[ 5 ] 左言龍. 高山茭白應用植保無人機開展病蟲害統防統治的實踐與思考[J]. 安徽農學通報, 2021, 27(1): 118-119.
[ 6 ] 楊良軍, 何圣米, 趙麗華. 茭白刪苗機及其在茭白生產上的應用效果[J]. 長江蔬菜, 2022(11): 7-9.
[ 7 ] 錢仲倉, 楊良軍, 齊文, 等. 一種茭白刪苗機以及適用于該茭白刪苗機的刪苗方法[P]. 中國專利: 202110805697. X, 2021-07-16.
[ 8 ] 王濤, 費焱, 李怡鵬, 等. 一種茭白收割機[P]. 中國專利: 202210590894. 9, 2022-05-27.
[ 9 ] 王靖凱, 張亞豪. 關于水生蔬菜茭白收獲機械的研究[J]. 農家參謀, 2019(11): 88.
[10] 夏亮, 潘巧紅. 淺談青浦區練塘鎮茭白產業發展現狀及其對策[J]. 上海農業科技, 2023(2): 10-11, 25.
[11] 陶忠富. 浙江茭白種植現狀及發展建議[J]. 中國果菜, 2020, 40(8): 73-76.
[12] 崔志超, 劉先才, 陳永生, 等. 我國大蒜全程機械化生產現狀、問題與對策[J] 中國農機化學報, 2023, 44(6): 239-243, 250.
Cui Zhichao, Liu Xiancai, Chen Yongsheng, et al. Status, problems and countermeasures of whole mechanized production of garlic in China [J]. Journal of Chinese Agricultural Mechanization, 2023, 44(6): 239-243, 250.
[13] 于慶旭, 張陸海, 蔡子平, 等. 甘肅根莖類中藥材機械化生產現狀及展望[J]. 中國農機化學報, 2023, 44(2): 29-36.
Yu Qingxu, Zhang Luhai, Cai Ziping, et al. Present status and prospect of mechanized production of Rhizome Chinese herbal medicine in Gansu Province [J]. Journal of Chinese Agricultural Mechanization, 2023, 44(2): 29-36.
[14] 王江, 李浩, 馬志偉, 等. 國內外設施蔬菜機械化發展現狀分析及對策[J]. 中國農機化學報, 2023, 44(1): 124-130.
Wang Jiang, Li Hao, Ma Zhiwei, et al. Analysis and countermeasures of mechanization development of domestic and foreign facility vegetables [J]. Journal of Chinese Agricultural Mechanization, 2023, 44(1): 124-130.
[15] 魏松, 茍園旻, 閆建偉. 貴州省蔬菜機械化發展現狀與策略[J]. 中國農機化學報, 2023, 44(7): 254-263.
Wei Song, Gou Yuanmin, Yan Jianwei. Current situation and development strategies of mechanized vegetable production in Guizhou [J]. Journal of Chinese Agricultural Mechanization, 2023, 44(7): 254-263.
[16] 劉繼展, 吳碩. 草莓全程生產機械化技術與裝備研究進展[J]. 農業機械學報, 2021, 52(5): 1-16.
Liu Jizhan, Wu Shuo. Research progress and prospect of strawberry who?process farming mechanization technology and equipment [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(5): 1-16.
[17] 盧琦, 劉立晶, 鄭德聰, 等. 燕麥生產全程機械化技術與裝備研究進展[J]. 農業機械學報, 2022, 53(S1): 118-139.
Li Qi, Liu Lijing, Zheng Decong, et al. Research progress of mechanization technology and equipment in whole process of oat production [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(S1): 118-139.
[18] 王虎存, 趙武云, 孫偉, 等. 馬鈴薯機械化收獲技術與裝備研究進展[J]. 農業工程學報, 2023, 39(13): 1-22.
Wang Hucun, Zhao Wuyun, Sun Wei, et al. Research progress in mechanized potato harvesting technology and equipment [J]. Transactions of the Chinese Society of Agricultural Engineering, 2023, 39(13): 1-22.
[19] 高墨堯. 丘陵山地農機動力底盤及車身調平裝置研究[D]. 長春: 吉林農業大學, 2017.
(下轉第 298頁)
(上接第 282頁)
[20] 王韋韋, 陳黎卿, 楊洋, 等. 農業機械底盤技術研究現狀與展望[J]. 農業機械學報, 2021, 52(8): 1-15.
Wang Weiwei, Chen Liqing, Yang Yang, et al. Development and prospect of agricultural machinery chassis technology [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(8): 1-15.
[21] 陳剛, 李青龍, 孫宜田, 等. 玉米聯合收獲機自動對行控制系統的研究[J]. 中國農機化學報, 2016, 37(3): 191-194, 280.
Chen Gang, Li Qinglong, Sun Yitian, et al. Study on automatic on?line control system of corn harvester [J]. Journal of Chinese Agricultural Mechanization, 2016, 37(3): 191-194, 280.
[22] 陳學深, 熊悅淞, 齊龍, 等. 基于觸感引導的小型水田行進底盤自動對行方法[J]. 農業工程學報, 2022, 38(21): 8-15.
Chen Xueshen, Xiong Yuesong, Qi Long, et al. Design and experiment of the tactile guidance system for the automatic alignment of small paddy moving chassis [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(21): 8-15.
[23] 胡曉龍. 谷物收獲機割臺仿形與自動對行裝置設計與試驗[D]. 泰安: 山東農業大學, 2022.
[24] 王金武, 楊會民, 陳毅飛, 等. 國內仿形技術在農用機械上的應用分析[J]. 中國農機化學報, 2023, 44(4): 31-39.
Wang Jinwu, Yang Huiming, Chen Yifei, et al. Application analysis of domestic copying technology in agricultural machinery [J]. Journal of Chinese Agricultural Mechanization, 2023, 44(4): 31-39.