四川苦蕎生產全程機械化關鍵環節現狀與發展
2024-11-12 00:00:00高新譚杰隨順濤李光輝萬先起蔣金巧
中國農機化學報 2024年11期

摘要:苦蕎作為四川涼山高寒山區彝族人民主要的糧食作物和經濟作物,苦蕎產業的可持續發展事關涼山產業進步與民族共同繁榮。開展苦蕎生產全程機械化研究對于提升苦蕎生產效率、降低人工成本有著重要意義。播種和收獲是苦蕎機械化生產的兩個關鍵性環節,也是兩大薄弱環節。基于此,重點介紹苦蕎機播與機收的研究現狀,指出苦蕎機械化發展過程中存在客觀條件復雜、專用機具缺失、關鍵技術攻關不足等問題。最后,針對性地提出加強基礎設施改造、推動標準制定、開展關鍵技術攻關及機具研發等發展建議,為推動苦蕎生產全程機械化提供借鑒和參考。
關鍵詞:苦蕎;播種;收獲;全程機械化;四川
中圖分類號:S517 文獻標識碼:A 文章編號:2095?5553 (2024) 11?0283?07
Present situation and development of key aspects in the whole process mechanization of Sichuan Tartary buckwheat production
Gao Xin, Tan Jie, Sui Shuntao, Li Guanghui, Wan Xianqi, Jiang Jinqiao
(Sichuan Academy of Agricultural Machinery Science, Chengdu, 610066, China)
Abstract: Tartary buckwheat is the main food crop and cash crop of the Yi minority in the high cold mountain area of Liangshan, Sichuan. The sustainable development of the Tartary buckwheat industry is related to the industrial progress of Liangshan and the common prosperity of the nation. It is of great significance to conduct research on the whole process mechanization of Tartary buckwheat production for improving the efficiency of buckwheat production and reducing labor costs. Sowing and harvesting are two key and also weak links in the mechanized production of Tartary buckwheat. In this paper, the current research status of machine sowing and harvesting of Tartary buckwheat was introduced, the problems existed in the development process of mechanization of Tartary buckwheat, such as complex objective conditions, lack of specialized tools and insufficient research on key technologies, were pointed out. Finally, the related suggestions were proposed to strengthen the transformation of infrastructure, promote the formulation of standards, carry out key technological breakthroughs and equipment research and development, so as to provide reference for promoting the whole process mechanization of Tartary buckwheat production.
Keywords: tartary buckwheat; sowing; harvesting; whole process mechanization; Sichuan
0 引言
苦蕎,別名韃靼蕎麥,其營養價值和藥用價值都極為豐富。苦蕎大多種植于西南地區高寒地帶,如四川、云南、貴州等地。而四川苦蕎大多分布于涼山州的高海拔地區,涼山州是世界苦蕎麥的發源地核心區域,涼山苦蕎麥被譽為“苦蕎極品”,涼山則是當之無愧的“苦蕎麥之鄉”。苦蕎是涼山百姓的主要糧食作物和經濟作物,苦蕎產業更是四川涼山重要支柱產業之一,涼山苦蕎茶年均產量占全國一半以上;孕育了“環太”“正中”等苦蕎品牌,暢銷全國并出口多個國家[1]。
苦蕎產業發展需要大量的苦蕎原料,這對于苦蕎生產提出了要求。開展苦蕎生產全程機械化研究對于提升苦蕎生產效率、降低人工成本有著重要意義。機械化播種、收獲是苦蕎機械化生產的兩個關鍵性環節,同時也是兩大薄弱環節。現有的苦蕎播種與收獲大多依賴人工,過程繁瑣,效率低下,一方面面臨著“無機可用”“無好機可用”的難題,另一方面勞動力轉移,進一步增加了人工成本,導致苦蕎生產效益下降,這并不利用苦蕎產業的長期可持續發展[2]。
基于此,圍繞苦蕎生產全程機械化的關鍵環節——機械化播種與機械化收獲開展研究,分析苦蕎生產在機械化播種和機械化收獲的研究現狀,剖析機播和機收環節所存在的問題,并提出發展建議,為推進四川苦蕎產業的全程機械化進程和四川苦蕎產業的可持續發展提供理論借鑒與參考。
1 苦蕎的典型特性
1.1 豐富的營養及藥用價值
苦蕎是一種藥食同源作物。苦蕎的蛋白質、脂肪等含量比小麥、大米更豐富;維生素、礦物質等含量豐富;氨基酸組成平衡;苦蕎的蛋白質含量較甜蕎更高。苦蕎具有優異的藥用價值,能夠預防心血管疾病和高血壓;黃酮類物質能夠有效預防毛細血管破裂引發的胃炎、腦出血等癥狀;蛋白質能夠降低血脂;膳食纖維能夠改善動脈硬化和預防肥胖[3, 4]。
1.2 典型的農藝特性
苦蕎是無限花序作物,種子成熟度不一致;苦蕎植株柔韌、蕎麥的生長周期短,在70~90天之間。苦蕎春播在3月下旬至4月下旬、夏播在6月中下旬,秋播在8月上中旬至9月上旬。苦蕎具有較好的耐旱特性[5]。苦蕎籽粒與花同株,莖稈含水量較高,易發生“繞辮子”現象;莖稈的彈性較差,在脫粒時莖稈易斷裂與籽粒混合,影響凈收率;籽粒與莖稈之間的銜接能力差,籽粒易脫落,導致籽粒損失率高;苦蕎籽粒在受到外部載荷壓力下易損傷破裂。苦蕎力學特性相較其他麥類作物更為特殊。國內學者針對蕎麥籽粒、莖稈、葉片等所涉及的力學問題進行了研究。李霖霖[6]對純蕎麥籽粒群進行了力學特性的試驗研究,測定了蕎麥籽粒的基本物理參數,含水率對籽粒的物理特性影響顯著;探究了不同品種蕎麥籽粒的散粒特性,結果表明:含水率越高,籽粒群的滑動摩擦系數與休止角更大。王強[7]基于力學試驗測試了不同品種和不同部位蕎麥的拉伸和剪切性能。結果表明,籽粒與花序柄之間的拉伸力與剪切力均小于花序柄和分支、分支和主莖稈;穗頭的拉伸、剪切強度分別為20~30 N、40~55 N;同一蕎麥品種莖稈的剪切力大于拉伸力。
2 苦蕎機械化播種研究現狀
苦蕎主產區大多位于高海拔地區,苦蕎種子具有體積小、重量輕、形狀不規則等特點。當前四川涼山的苦蕎播種方式大致有三類:人工撒種、人工播種、小型條播機條播,其中小型條播機條播方式應用較少。傳統的人工撒播存在著工作效率低、播種不均勻、生長高度不一致,后期管理成本增加等諸多問題。當前勞動力短缺、無人可用的現象日趨嚴重,因此亟需機械化播種技術代替傳統人工撒播方式。
2.1 排種裝置
研發苦蕎播種機的核心在于設計一款苦蕎適用的排種器。排種器類型豐富,有外槽輪式(移動式和固定式)、內槽輪式、滾齒式等,如表1所示。
排種器的特征參數對于排量均勻性、一致性以及種子破損率有著重要影響,目前針對排種裝置的研究也大多集中于關鍵參數的優化。茹孟菲[8]研制了一款內充種離心式排種器,利用離心力實現充種、護種與排種,其結構簡單、體積小,能夠適應丘陵山區工作。李登[9]設計了一種移動式外槽輪排種器,并基于離散元法探究了槽輪轉速、凹槽半徑、槽數對排量的影響,并確定了槽輪的主要參數。基于田間試驗,對覆土率、覆土厚度、播種深度、排量一致性、排量穩定性進行了測試,試驗結果表明設計的排種器的可行性,這對于丘陵山區的苦蕎播種機的研制有著重要意義。
卜一等[10]設計了2BF-3大壟雙行蕎麥播種機,采用翼鏟式施肥開溝器和滑刀式播種開溝器,能夠實現一壟雙行、精少量播種,經田間試驗證明,其種子破損率排種均勻性變異系數分別為0.1%和28.1%,達到農藝要求。梅林森等[11]研制了一款小型3行蕎麥播種機,種、肥排用量控制簡單,便于操作,且靈活性好,能夠適應丘陵山區的耕種條件。高子洋[12]設計了一種錐體柵格式蕎麥小區播種機,基于對開式排量調節機構,通過地輪傳動,實現均勻排種。程玉明[13]設計了一種蕎麥穴播機,采用勺輪式排種器和鴨嘴式成穴裝置,經田間試驗測定,其試驗指標達到行業標準要求。李明生等[14]設計了一款蕎麥排種器,基于離散元法探究了排種器排量與槽輪轉速、槽數、凹槽半徑的關系,在槽數和半徑確定的情況下,排量與轉速成線性關系,經臺架試驗檢驗了離散元法仿真的數據可靠性。
2.2 播種深度和覆土對苦蕎播種的影響
苦蕎種子籽粒小、破土能力差,因此播種深度及覆土厚度對蕎麥幼苗質量有著重要的影響。播種過淺會導致種子裸露、出苗率差;播種過深會影響種子萌發,導致在破土過程中消耗更多的養分,致使幼苗纖細,質量較差。覆土能夠有效鎖水,給予苦蕎種子較好的生長環境,有利于提升苦蕎的出苗率和根系活力。
向達兵等[15]對苦蕎種子的適宜播種深度和覆土厚度進行了探討。結果表明,播種深度對苦蕎幼苗素質影響較大,播深4 cm為最佳條件,當播深較淺(2 cm)時出現了出苗率差、成活率低、莖稈質量差等問題;當播深較深時(6 cm),出苗率下降,苦蕎生長整體情況較差。播種過淺或過深均會導致根系活力、葉綠素含量、干物質量等降低。而相較于不覆土情況,覆土具有保溫、保濕效果,可以顯著提升苦蕎的出苗率和成苗率。梅林森等[11]探究了播種及覆土深度對苦蕎破土率的影響,在機播條件下,隨著機播深度的增加,苦蕎出苗數呈現先增后減的趨勢。在研究特定條件下,在深度為4 cm時,成苗率、幼苗質量綜合條件最好。
2.3 新型精量播種技術
傳統的地輪驅動播種相較于人工撒種大大降低了人工成本、提升作業效率,但仍舊存在由于打滑、路徑偏移等現象引起的漏播、重播、播種均勻性差等問題,只對排種器本身進行參數優化難以解決這些問題。亟需研究新型的精量播種技術以實現播種情況的實時監測、精量播種與補種。目前新型的精量播種技術多針對于谷子、玉米、蔬菜等作物,還未有研究涉及蕎麥新型精量播種技術。
Kamgar等[16]設計了一種由速度可控直流電機、數字編碼器和中控箱組成的精量排種裝置,由編碼器進行地輪和計量軸測速通過測速反饋及時調整播種速率。結果表明,該類小麥播種機在不同的前進速度和麥茬覆蓋率下均可得到理想播種速度。聶秀展等[17]為解決漏播問題設計了花生精量播種檢測及補償系統,基于光電傳感器和霍爾傳感器以及中央處理器實現了自適應補償系統,能夠自動補播和監控報警,檢測精度達到98.1%、補種合格率為98.5%。Xi等[18]設計了一種無管播種方法(no?tube seeding,NTS),并基于臺架試驗探究了行走速度、轉速、離地間隙對播種質量的影響。結果表明,離地間隙影響顯著,離地間隙越小播種精度越高;而轉速對播種均勻性的影響顯著并呈正比關系。趙曉順等[19]設計了電控精量播種系統,基于Z-N法和模糊控制確定了電控參數,將響應時間有效縮短,提高了播種合格率。
3 苦蕎機械化收獲研究現狀
傳統的人工收獲或者部分機械作業的半人工收獲方式,工作效率低下、收獲周期過長、人力成本較高等問題突出,因此開展苦蕎收獲機械化研究對于提升效率、增加效益有著重要的作用。
3.1 收割裝置
收割裝置是收獲機進行收獲作業的核心部分,其性能的優劣關乎收獲效果。國內學者對割臺結構進行了不斷的改進以提升割臺的普適性和可靠性。割臺由分禾器、切割器、撥禾裝置、輸送裝置組成。在作業過程中,分禾器將作物劃撥到切割區域,撥禾器將作物撥送至切割器,切割器切割后,將切割的作物通過輸送裝置送至脫粒裝置進行脫粒。
針對收割裝置,大多研究集中在通過仿真或試驗的方式進行關鍵參數的優化。徐亮等[20]進行了收割機割臺設計,并基于ANSYS軟件進行了模態分析,將固有頻率與激勵頻率進行了對比研究,適當增加割臺的結構強度以減輕割臺的共振現象,增加割臺的使用壽命。金誠謙等[21]設計了一種主—副板壓緊式割臺仿形結構,并基于多體動力學—離散元耦合方法(MBD-DEM)進行仿真,建立了彈簧剛性系數、初始長度,主、副仿形板償付與作用力、土壤下陷距離之間的回歸模型,得出了最佳參數組合。結果表明仿形結構對地形變化感知靈敏且仿形準確度較高。趙景濤[22]基于仿真軟件設計了一種蕎麥聯合收割機的割臺裝置,通過雙曲柄機構降低收割損失、加裝帶式輸送機構減少堆積堵塞、加大割臺兩側板面積減少掛穗和傾翻現象,經Ansys Workbench靜力學分析,撥禾機構所受最大應力和最大形變分別為21.708 MPa、0.020 8 mm,符合強度和剛度需求。
在實際的作業過程中,田間地面凹凸不平,尤其是丘陵山區,可能還存在一定的坡度,傳統割臺依靠人工調整割臺作業參數,準確性差,在收獲過程中的很大一部分損失來源于割臺調整不及時。因此國內學者展開了智能化割臺的研究,通過對地面仿形和高度自適應實現割臺的實時自動調節,從而更好地滿足收獲需求。
劉青山等[23]提出了基于雙慣性傳感器的割臺實時高度獲取方法及基于線性二次調節器(LQR)的割臺高度控制方法。經仿真對比發現,LQR控制器的動態性能優于傳統PID控制器,能夠有效改善由于作業過程中路面起伏所引起的割臺高度變化和喂入量波動的問題。Ni等[24]設計了一種仿形自適應割臺,基于角度傳感器測量角度,建立割臺高度剖面計算模型,試驗結果表明高度誤差小于2 mm。Ruan等[25]設計了一種聯合收獲機割臺高度自動控制系統,基于灰度預測PID算法減少滯后情況。經仿形結構測試高度,調整收割臺油缸的擴張來進行高度調節,其偏差控制在21 mm內。尤興芹等[26]研發了一種收獲機械智能割臺預收集裝置,通過接觸式機械實現割臺高度檢測;并開發了信息管理系統進行作業過程的實時監控、信息采集及存儲,提升了收獲機械的智能化程度。
3.2 脫粒裝置
影響脫粒效果的關鍵性因素有兩大類,(1)脫粒裝置的關鍵性參數,如滾筒速度、直徑、長度,脫粒間隙,喂入量、喂入均勻度等;(2)作物的生物特性,如含水量、成熟度、籽粒與莖稈的連接力等。
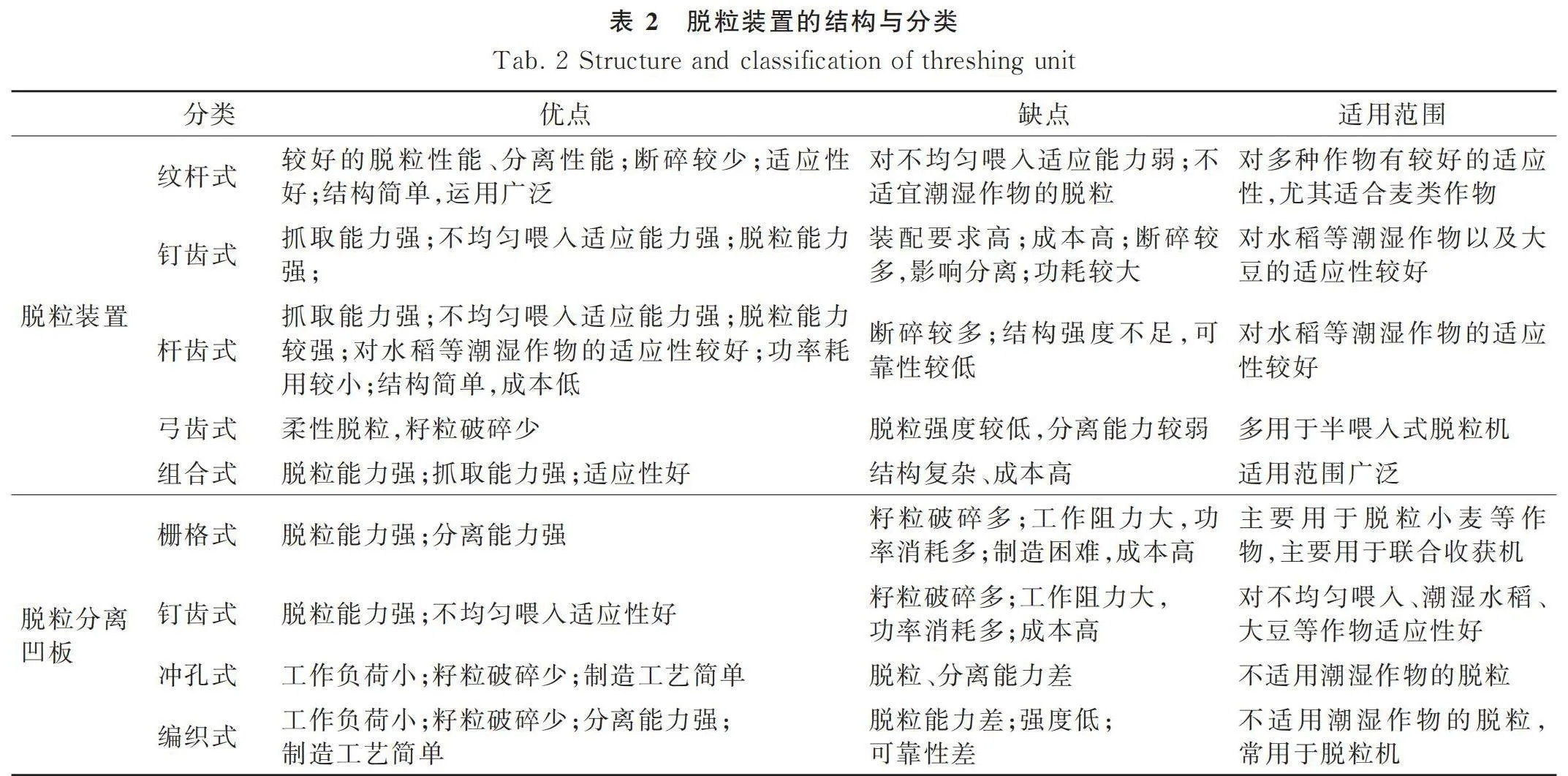
脫粒裝置由脫粒滾筒和凹板組合而成,直接影響機器的脫粒性能。脫粒裝置先脫粒后分離。經打擊、揉搓碾壓等方式使得籽粒脫落,隨后滾筒以高速旋轉運動帶動籽粒、其他雜質作圓周運動,籽粒重量更大,在離心力作用下從莖稈中分離至外層,經凹板阻擋實現籽粒與雜質分離。表2羅列了目前常用的脫粒滾筒和凹板類型[27]。
Wang等[28]對脫粒輸出各成分的含量、脫粒滾筒的軸向分布情況進行了探究,銼刀輥滾筒和尖齒滾筒下方的收納箱分別苦蕎籽粒、葉片、花瓣混合物和短莖,短莖主要分布在滾筒后方,而籽粒、葉片、花瓣混合物在滾筒前部,短莖含量為14%~16%。
3.3 清選裝置
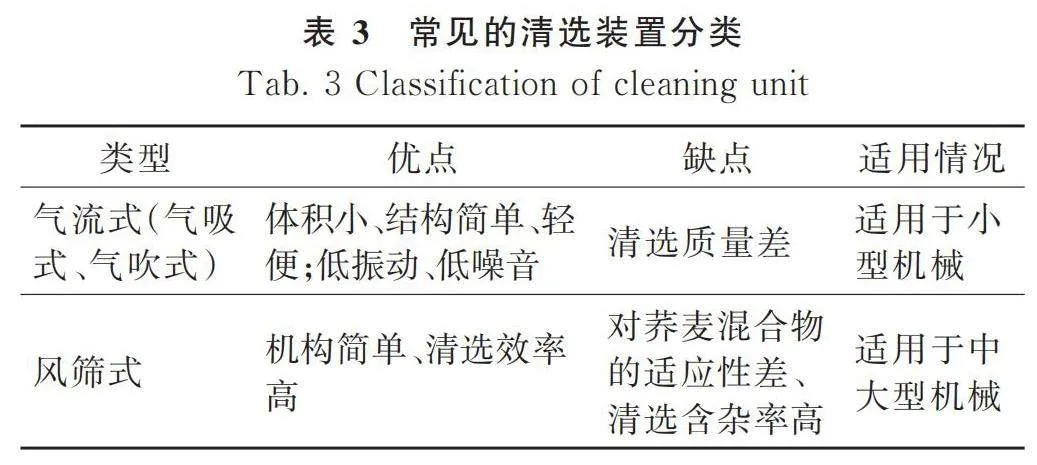
脫粒后會得到蕎麥籽粒、莖稈、葉片、雜草等混合物,須經過清選裝置的篩分清選將蕎麥籽粒從混合物中分離出來。清選裝置主要有兩類,氣流式和風篩式[29],其基本特征見表3。
目前針對清選裝置的研究大致有三類。一是探究籽粒和雜質在清選裝置中的分布規律;二是針對清選裝置的關鍵參數進行參數優化,提升潔凈率;三是通過其他辦法提升清選潔凈率,如增設預清選裝置、雙層清選裝置等。其中以第二類的研究占比較大。樊榮等[29]基于谷物清選試驗臺對蕎麥混合物在風篩式清選裝置中在的運動與分布規律進行了研究。結果表明,無論是橫向還是縱向,混合物的分布都較為不均勻,且蕎麥籽粒主要分布于收集箱的中間位置;在收集箱0~1 100 mm區域內,蕎麥籽粒的雜余量和含雜率增長緩慢,而在1 100~1 500 mm區域內增長迅速,該研究給清選裝置的設計提供了依據。張龍祥[30]通過設置滾筒篩預清選裝置進行初級篩分以減輕清選室清選壓力,其次基于Fluent-EDEM耦合模擬蕎麥籽粒在清選室的運動情況,基于正交試驗給出了清選效率最高(98.1%)時的參數組合:風機傾角、風速分別為9 m/s、20°,振動篩振幅、頻率分別為25 mm、6 Hz。荊誼[31]通過仿真軟件對蕎麥雙層清選裝置進行了簡化分析,對清選裝置中蕎麥籽粒的運動規律進行了仿真探討,結果表明,篩面上的蕎麥籽粒越靠近曲柄端,其運動強度越低,清選效率越差。黃穎石[32]通過響應面法進行優化分析,吹雜風機轉速對含雜率影響最大、喂入風機轉速次之,最后是分離筒內吸雜管長度,并得出了在潔凈率(94.78%)和損失率(1.67%)最優情況下的蕎麥旋風分離清選裝置的參數組合。
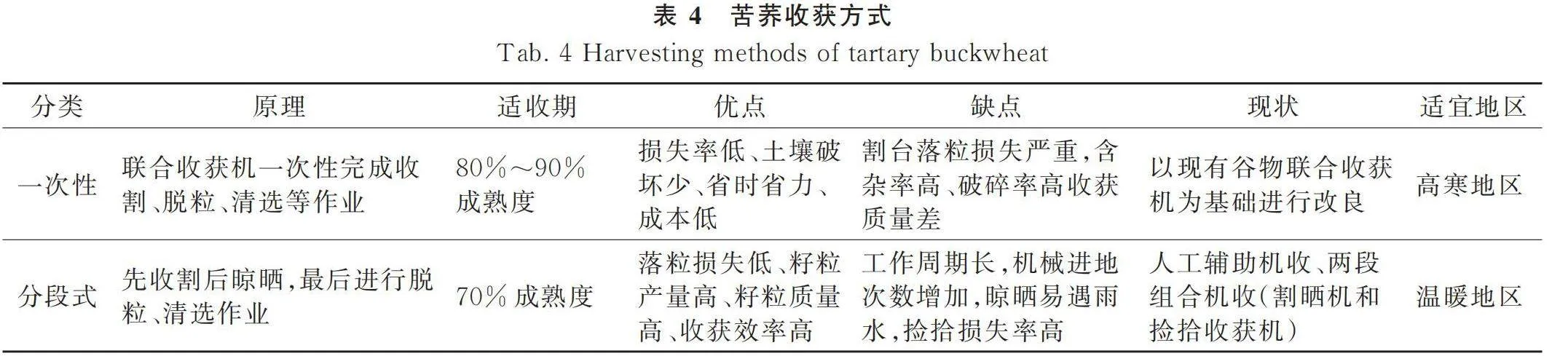
3.4 收獲方式
苦蕎的收獲機械研究較晚,大多是通過對水稻、小麥的收獲技術進行改進而來。苦蕎大多種植于丘陵山區,作業條件困難,這給收獲機械的研制增加了難度。為推動蕎麥生產的機械化,人們對苦蕎的聯合收獲裝備進行了設計,包括小型自走式聯合收獲機、全喂入式聯合收獲機、撿拾收獲機等。
目前苦蕎的機械收獲方式主要有兩種:一次性聯合收割和分段聯合收割方式,如表4所示。兩段式機械化收獲:具有更長的適收期,后熟過程能夠增加蕎麥產量、提升籽粒品質,使回收籽粒的清潔度高,收獲作業能大幅降低損失率[33]。無論是一次性收獲還是分段式收獲,都存在著落粒損失較為嚴重、籽粒含雜率較高等亟待解決的問題,這也是制約苦蕎生產機械化進程的關鍵性因素。
4 四川苦蕎生產全程機械化關鍵環節存在的問題
4.1 客觀條件制約
四川苦蕎大多種植于涼山州,以高海拔地區作業為主,盡管自然條件更加適合苦蕎生長,但地形更加復雜、平整度欠缺,給機械化作業帶來了巨大的挑戰。
苦蕎種植戶種植零散,導致種植品種、種植時間、成熟時間不盡相同,不利于在同一時間機械化作業;此外種植地塊零散,致使作業環境較為復雜,不具備當前機具的應用場景,機械化收獲難度大,效益低,難以實現機械化推廣。
4.2 專用機械缺失
一方面優良技術沒有進行有效轉化。四川苦蕎雖在涼山州等地種植較多,但當地的機械化水平較低,極大地影響了生產效率。目前耕整地環節部分采用機械化,而在播種、收獲等環節的機械化率很低。眾多研究僅僅停留在關鍵作業環節上,例如割臺、脫粒、清潔等技術,但未能進一步進行研發,形成切實可用、適應需求的機具。
另一方面,改良機具無法滿足生產收獲需求。苦蕎種植相較于水稻、油菜等大面積種植作物更加小眾,種植區域更加集中。因此,專門針對于苦蕎種子的播種機以及針對苦蕎籽粒收獲的收獲機研發進度遲緩。僅將谷子、麥子的播種機和收獲機進行改良即用在苦蕎的播種與收獲會在實際的作業過程中存在諸多問題,如排種裝置與苦蕎種子的大小、質量、形狀不匹配,苦蕎籽粒、莖稈之間特殊的力學特性致使在收割過程中損失率較高等。整體損失率高,收獲效益低下,這也導致了當地百姓偏向人工收獲而機械收獲無法實現有效推廣。因此亟需開展針對于苦蕎的專用播種機與收獲機研究。
4.3 關鍵技術攻關不足
1) 精量播種技術研究缺失。針對漏播重播以及播種均勻性的問題,目前已經開展了新型精量播種技術的研究,但目前這些技術大多應用于水稻、油菜等大面積種植作物,苦蕎精量播種技術還鮮有研究涉及。
2) 收割技術研究不足。一方面,收割裝置的自適應能力不足,針對高海拔地區地面平整度不夠的問題,收割裝置不能及時、快速地進行高度變化識別,導致收割的損失率和含雜率較高。當前專家針對地面仿形和高度自適應問題開展了一些研究,通過引入傳感技術、圖像識別等新型技術,使損失率有所下降,但其中所存在的反應滯后、高度調整不及時等問題仍需進一步解決。另一方面,苦蕎籽粒與莖稈之間的銜接力弱,籽粒在收割過程中經碰撞、震動等因素易掉落,也會導致收割過程中的籽粒損失率較高。而針對該問題,目前鮮有研究涉及。因此亟需開展低損收割技術研究,降低苦蕎機收過程中的損失率。
3) 脫粒技術研究不深入。破碎率和損失率是判斷脫粒裝置性能優劣的兩個重要指標。目前為了有效控制這兩項指標,開展了大量針對不同類型脫粒裝置進行關鍵參數優化的研究,但仍舊存在研究不足的問題。例如,缺乏了機械化脫粒對苦蕎籽粒的損傷機理研究。在實際的脫粒過程中脫粒裝置會對苦蕎籽粒產生一定程度的損傷。成熟度低的籽粒易擠碎或壓扁,成熟度高的籽粒易殼裂,因此,亟需開展脫粒裝置對苦蕎籽粒的作用機理研究。
4) 清選技術研究不足。含雜率是判斷清選性能優劣的關鍵性指標。清選裝置依托籽粒和莖稈不同的生物、結構特性而實現混合物的分離,目前針對苦蕎籽粒、莖稈等混合物的生物、結構特性的系統性研究較少;在清選裝置的設計方面,針對籽粒混合物的分布情況的研究較少,設計依據不足,導致清選含雜率較高。
5) 對苦蕎的生物學、力學特性研究不足。貫穿于播、收關鍵技術的是苦蕎自身的結構特性、力學特性。如排種技術關系到苦蕎種子自身的大小與形狀,收割技術關系到苦蕎的生長高度、籽粒力學特性,脫粒損傷涉及到粒子的生物學、結構特性,清選分離涉及到籽粒莖稈等的含水率等。因此,亟需開展針對苦蕎的生物學、力學特性的系統全面研究。
5 四川苦蕎生產全程機械化發展建議
5.1 加強基礎設施改造
當地的地形、地塊等客觀條件不足也是制約農機推廣的關鍵性因素。因此,應加強打造農機具適用的應用場景,改善道路等基礎設施,針對不同坡度的田塊采用宜機化改造、小土塊連接等方式創造可行的機械化條件,實現作業人員的生命安全保障和機械化進程的推進。
5.2 促進標準的制定
目前關于四川苦蕎的現行地方標準只有DB51/T 812—2008《苦蕎麥生產技術規程》,應加快四川苦蕎育種、機械化栽培、機械化收獲等方面地方標準的制定,形成技術規范,促進機械化進程的發展。
5.3 加強技術攻關
加強苦蕎生物特性和力學特性的系統研究,探究機具作用與苦蕎自身特性之間的內在聯系;加強排種技術、地面仿形與高度自適應割臺技術、脫粒技術、清選技術研究,進行參數的進一步優化,使設計結構更加合理,其次進一步引入新型技術,實現跨領域融合;開展鮮有涉及的苦蕎精量播種技術、低損割臺技術、機械化脫粒損傷機理研究,補充相關領域的研究空白。
5.4 開展機具研發
結合當地的實際應用場景,針對蕎麥生產全程機械化的兩大薄弱環節——機播、機收,開展專用蕎麥播種機和收獲機的研發,以提升工作效率、降低損失率,促進生產增收。
5.5 加大推廣培訓
統籌組織苦蕎機械化生產技術培訓,針對拖拉機駕駛技術、機播、機收等關鍵技術開展技能培訓,組織實地操作、參觀實訓,提升相關技術能力。宣傳機械化生產的相關知識,提升苦蕎種植戶們的科技認知水平,促進機械化推廣。
參 考 文 獻
[ 1 ] 彭曉琴, 徐一, 萬勇, 等. 涼山州苦蕎種植業發展現狀及建議[J]. 現代農業科技, 2022(20): 184-187.
[ 2 ] 徐一, 彭曉琴, 邱云橋. 布拖縣苦蕎產業發展情況調研報告[J]. 四川農業與農機, 2021(1): 44-45.
[ 3 ] 張思維, 李東梅, 孫建云, 等. 4種雜糧的營養價值與保健功能概述[J]. 農業科技與信息, 2022(24): 80-85.
[ 4 ] Kazumi N, Yusuke Y, Hitoshi K, et al. Physicochemical and functional properties of buckwheat (Fagopyrum esculentum Moench) albumin [J]. Future Foods, 2022, 6: 100178.
[ 5 ] Xabier S M G, Jon M A, Usue P L. Could buckwheat and spelt be alternatives to wheat under future environmental conditions study of their physiological response to drought [J]. Agricultural Water Management, 2023, 278: 108176.
[ 6 ] 李霖霖. 谷子、蕎麥籽粒群力學特性試驗研究與離散元仿真分析[D]. 晉中: 山西農業大學, 2020.
[ 7 ] 王強. 齒帶式蕎麥撿拾試驗平臺的設計與試驗研究[D]. 楊凌: 西北農林科技大學, 2018.
[ 8 ] 茹孟菲. 蕎麥內充種離心式排種器的設計研究[D]. 晉中: 山西農業大學, 2020.
[ 9 ] 李登. 基于離散單元法的蕎麥排種器設計與研究[D]. 重慶: 西南大學, 2018.
[10] 卜一, 唐超, 李盡朝, 等. 大壟雙行蕎麥播種機的研制[J]. 干旱地區農業研究, 2016, 34(3): 281-284, 290.
[11] 梅林森, 趙幫泰, 郭曦, 等. 高寒山區蕎麥機械化播種裝備及技術研究[J]. 四川農業科技, 2019(2): 37-39.
[12] 高子洋. 燕麥蕎麥小區播種機的設計與研究[D]. 晉中: 山西農業大學, 2021.
[13] 程玉明. 蕎麥穴播機的設計與試驗[D]. 楊凌: 西北農林科技大學, 2021.
[14] 李明生, 葉進, 李登, 等. 基于離散單元法的蕎麥播種機排種器設計與試驗[J]. 西南大學學報(自然科學版), 2019, 41(4): 78-85.
Li Mingsheng, Ye Jin, Li Deng, et al. Design and test of a seed metering device for buckwheat seeder based on the discrete element method [J]. Journal of Southwest University (Natural Science Edition), 2019, 41(4): 78-85.
[15] 向達兵, 鄒亮, 彭鐮心, 等. 適宜機播深度及覆土厚度提高苦蕎幼苗素質[J]. 農業工程學報, 2014, 30(12): 26-33.
Xiang Dabing, Zou Liang, Peng Lianxin, et al. Appropriate mechanical sowing depth and soil?covering thickness improving seedling quality of tartary buckwheat [J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(12): 26-33.
[16] Kamgar S, Noei?Khodabadi F, Shafaei S M, Design, development and field assessment of a controlled seed metering unit to be used in grain drills for direct seeding of wheat [J]. Information Processing in Agriculture, 2015, 2(3-4): 169-176.
[17] 聶秀展, 于艷, 江景濤, 等. 花生精量播種漏播檢測及補償系統設計與試驗[J]. 青島農業大學學報(自然科學版), 2020, 37(2): 140-145.
Nie Xiuzhan, Yu Yan, Jaing Jingtao, et al. Design and experiment of miss?seeding detection and reseeding system for peanut precision sower [J]. Journal of Qingdao Agricultural University (Natural Science), 2020, 37(2): 140-145.
[18] Xi Xiaobo, Gao Wenjie, Gu Chenjia, et al. Optimisation of no?tube seeding and its application in rice planting [J]. Biosystems Engineering, 2021, 210: 115-128.
[19] 趙曉順, 趙達衛, 閆青, 等. 基于模糊PID的電控精量播種系統與試驗研究[J]. 河北農業大學學報, 2021, 44(1): 120-127.
[20] 徐亮, 肖平, 馬偉, 等. 基于ANSYS的收割機割臺模態分析及結構優化設計[J]. 新鄉學院學報, 2021, 38(12): 58-62.
[21] 金誠謙, 劉崗微, 倪有亮, 等. 基于MBD-DEM耦合的聯合收獲機割臺仿形機構設計與試驗[J]. 農業工程學報, 2022, 38(2): 1-10.
Jin Chengqian, Liu Gangwei, Ni Youliang, et al. Design and experiment of header profiling mechanism for combine harvester based on MBD-DEM coupling [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(2): 1-10.
[22] 趙景濤. 蕎麥聯合收割機割臺的設計與仿真[D]. 晉中: 山西農業大學, 2019.
[23] 劉青山, 李川, 魏新華, 等. 基于LQR的聯合收割機割臺高度控制研究[J]. 電子測量與儀器學報, 2022, 36(4): 6PV2jWA0oKAuiAVmPT6CjBgjrwfpI8ZGXqoy4D8QlepQ=5-72.
[24] Ni Youliang, Jin Chengqian, Chen Man, et al. Computational model and adjustment system of header height of soybean harvesters based on soil?machine system [J]. Computers and Electronics in Agriculture, 2021, 183: 105907.
[25] Ruan Mingjian, Jiang Hanlu, Zhou Haili, et al. Design and test of automatic control system for header height of combine harvester [J]. Agricultural Engineering, 2022, 3(68): 569-578.
[26] 尤興芹, 王國強, 單宇, 等. 收獲機械智能割臺預收集裝置及信息管理系統設計[J]. 現代農業科技, 2022(20): 103-107.
[27] 倪國慶, 朱金光, 焦中元, 等. 影響谷物收割機脫粒分離能力的要素分析與探討[J]. 農業機械, 2018(3): 84-87.
[28] Wang Jiawei, Li Zhiwei, Hussain S, et al. Design and threshing outputs study of internal and external rotary roller buckwheat thresher [J]. Inmateh?Agricultural Engineering, 2020, 60(1): 173-182.
[29] 樊榮, 崔清亮, 盧琦, 等. 風篩式清選裝置篩下物料分布規律研究[J]. 中國農機化學報, 2023, 44(1): 142-151.
Fan Rong, Cui Qingliang, Lu Qi, et al. Study on distribution law of materials under sieve in air?and?screen cleaning device [J]. Journal of Chinese Agricultural Mechanization, 2023, 44(1): 142-151.
[30] 張龍祥. 基于FLUENT-EDEM耦合的蕎麥收獲機清選裝置研究設計[D]. 成都: 成都大學, 2020.
[31] 荊誼. 蕎麥聯合收割機清選裝置的運動仿真分析與優化[D]. 晉中: 山西農業大學, 2019.
[32] 黃穎石. 蕎麥旋風分離清選試驗平臺設計與試驗研究[D]. 楊凌: 西北農林科技大學, 2021.
[33] 黃小娜, 張衛國, 黨威龍, 等. 蕎麥收獲機械研究現狀及發展趨勢[J]. 農業機械, 2018(10): 84-90.