“小蟲子”也可以有大作為
2024-11-12 00:00:00劉志偉詹文成
光明少年 2024年11期
當飛機執行完航班任務,一群機械“小蟲子”背著微型攝像頭,排著隊爬進飛機發動機。不多時,發動機內部的圖像信息就傳到了操作員手上,操作員通過圖片判斷發動機內部是否存在漏油、結構損傷(如葉片出現裂紋)等隱患。

當地震發生后,機械“小蟲子”成群進入廢墟,穿過狹小通道、翻越障礙物執行搜救任務。多個“小蟲子”組成了搜救網,準確定位幸存者位置,并向搜救人員傳輸了幸存者周圍廢墟的信息。
在信息、材料、微加工等技術高速發展的背景下,上面場景中的機械“小蟲子”走進了我們的生活。2024年5月,北京航空航天大學研究團隊成功研制出一種具備快速爬行和方向控制能力的微型機器昆蟲BHMbot(BeiHang Microrobot),為未來大型機械裝備結構損傷檢測和災后救援提供了新思路。
我們一起來了解一下這只神奇的機械“小蟲子”。
BHMbot小檔案
全名:北航機器昆蟲BHMbot
尺寸:2厘米
重量:自重0.34克,集成微型電池、控制電路、通訊電路等模塊后總重1.76克
開發者:北航能源與動力工程學院智能推進實驗室
主要用途:航空發動機結構損傷檢測、災后搜救、信息偵察等
特長:運動速度快,背負自身質量5.5倍(2克)重物后速度可達25倍身長每秒(和空載的速度相當),與普通蟑螂運動速度相當
Buff:控制策略簡潔高效,能輕松實現沿復雜路徑爬行、遙控爬行
強勁動力從何而來?
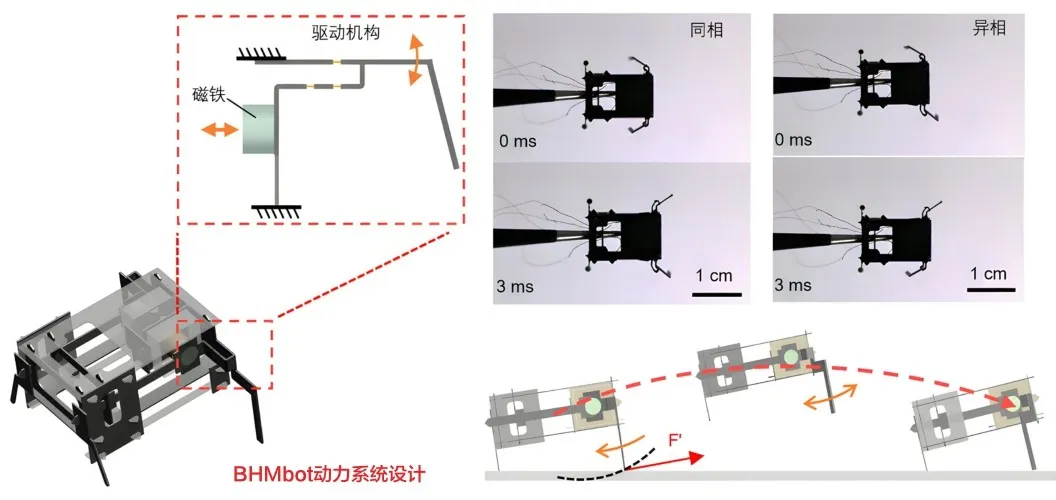
BHMbot采用了兩個電磁驅動器作為核心動力來源,其獨特的動力方案成功解決了微型機器昆蟲承載后速度驟降的難題。對于尺寸在厘毫米級的微型機器昆蟲,目前國際上面臨的首要技術挑戰,是“微型動力系統”的研發。大多數微型機器昆蟲在背負微型能源(電池)、控制電路后速度驟降(下降幅度超過90%),甚至根本無法實現爬行。BHMbot采用振動類電磁驅動器作為動力核心,在交流電的作用下,電磁驅動器輸出高頻率振動,通過靈巧的傳動機構設計,將驅動器的振動輸出轉化為BHMbot前腿的擺動,前腿通過與地面的相互作用實現前進。
從爬行步態來看,BHMbot采用了與哺乳動物類似的奔跑步態。自然界的哺乳動物(如獵豹、犬類等)和部分昆蟲(如蟑螂等),在捕食或逃避天敵時往往都采用奔跑步態實現快速前進。在奔跑過程中,身體通過腿部與地面的周期性作用實現騰空,形成類似于彈跳前進的運動方式。BHMbot同樣采用上述奔跑步態實現快速前進,當前腿擠壓地面時,地面提供給BHMbot向前騰空的作用力,機器昆蟲前進的速度由其單次彈跳的距離和每秒彈跳的次數決定。空載時,BHMbot單次彈跳距離較長,與此對應的騰空時間也較長,因而在一秒內機器昆蟲彈跳的次數有限;當背負載荷時,機器昆蟲單次彈跳距離縮短,單次彈跳所需的時間也縮短,在一秒內可以彈跳的次數更多。彈跳頻率和彈跳距離的互補式設計使BHMbot在承載后速度依然可以維持較高水平。

高效控制怎樣實現?
除了驚人的爬行速度外,BHMbot的另一卓越性能是爬行方向控制性能。對于厘毫米級的微型機器昆蟲而言,現有的通用方案一般是采用多個驅動器控制機器昆蟲的腿部運動。然而,過多驅動器必然會提高結構的復雜性,不利于機器昆蟲的微型化。針對這一難題,BHMbot采用了與人行走轉彎類似的控制方案,通過2個電磁驅動器即可同時實現機器昆蟲的驅動和方向控制。人在行走過程中,若左右兩條腿的速度保持一致,就可以近似沿一條直線行走;當需要左拐或右拐時,人只需要在行走過程中微調左右腿的速度差。BHMbot便采用了上述控制方案,當左轉彎時,它的左側腿部的速度小于右側的速度,同理,當右轉彎時,右側腿部的速度小于左側的速度。在該控制策略下,機器昆蟲無需調整腿部運動方式,僅需控制兩側速度的差異就能輕松實現方向控制。
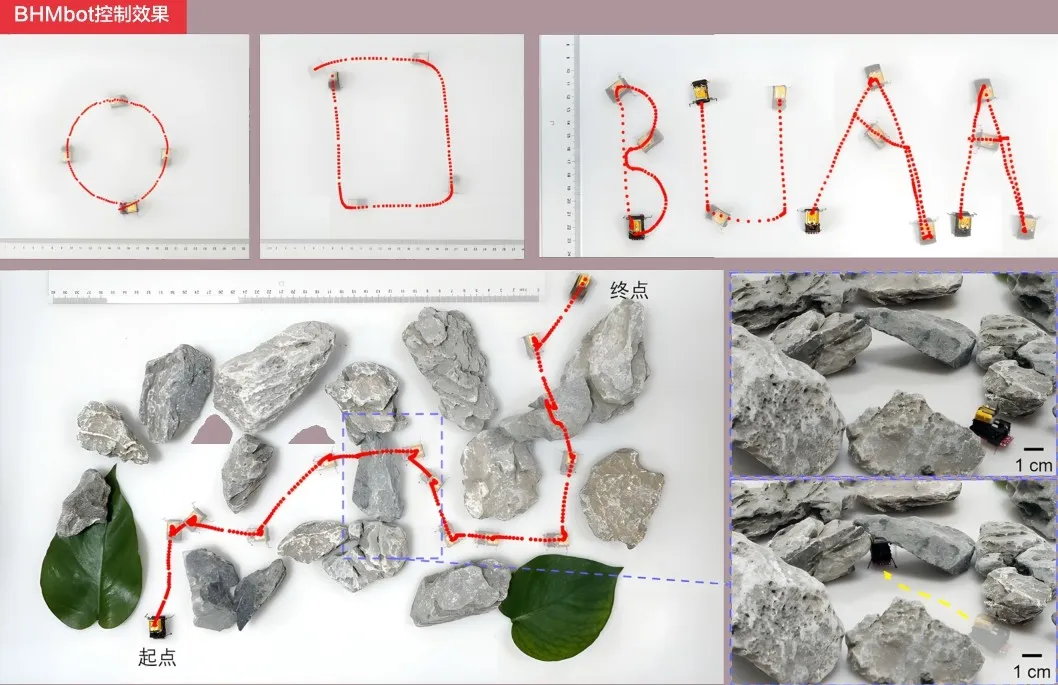
基于上述控制方案,研發團隊針對BHMbot的無線控制研發了微型控制電路,同時集成了遙控通訊的功能。目前,BHMbot提供兩種操縱模式,第一種模式是程序控制,在爬行任務開始之前,為BHMbot預設一段軌跡代碼(如圓、矩形、字母軌跡等),當BHMbot工作時,可沿規定軌跡運動;第二種模式是實時遙控控制,操縱員實時發送操縱指令,BHMbot即可遵循遙控指令實現爬行。

為“上崗”接受重重考驗
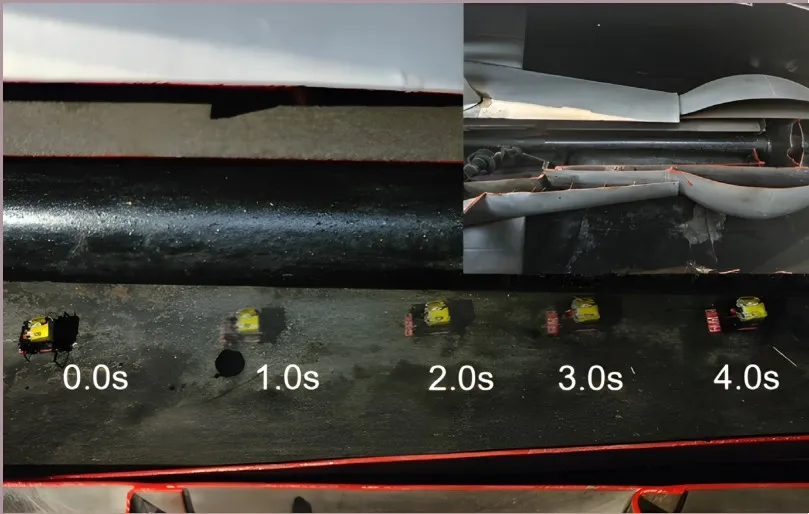
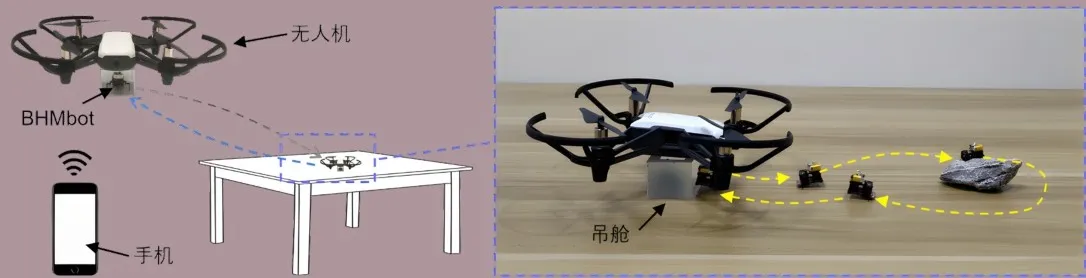
在快速機動、無線控制的能力保證下,BHMbot目前已實現在特定實驗場景的功能驗證。首先,是災后搜救場景驗證,BHMbot攜帶著微型麥克風爬行至模擬廢墟,采集廢墟中發出的SOS信號并將其實時回傳至控制端,任務結束后BHMbot返回至起始點。其次,是航空發動機內部爬行驗證,面對航空發動機結構損傷檢測,考慮到拍攝圖像的需求,BHMbot目前成功集成了一款微型攝像頭并能實現圖像的實時回傳。此外,當BHMbot遠距離執行任務時,可通過無人機將其投放至指定位置,完成任務后,它會爬行進入無人機吊艙并通過無人機返回。
盡管BHMbot已在實驗室條件下實現了快速爬行、無線控制、傳感集成等功能,但距離實際應用還存在一定差距。為實現在航空發動機內開展結構損傷檢測,未來還需針對BHMbot吸附爬行(類似于壁虎)和自主避障控制功能開展研發;考慮單個BHMbot作業區域有限,未來應用時往往需要多個BHMbot協同工作,因此,集群控制和集群智能也是BHMbot未來發展的方向之一。
作者單位 北京航空航天大學