基于高度計輔助的GNSS欺騙干擾檢測
2024-11-22 00:00:00徐奕禹陳長風袁雪林陳正坤周志健
系統工程與電子技術 2024年5期
摘 要:
氣壓高度計可以獲得精確高程數據,且不受外界電磁干擾,利用氣壓高度計輔助全球導航衛星系統(global navigation satellite system, GNSS)進行欺騙檢測具有顯著優勢。為了評估氣壓高度計在GNSS欺騙檢測中的能力并提高檢測概率,首先對系統誤差進行建模分析,并利用差分整合移動平均自回歸(autoregressive integrated moving average, ARIMA)模型對氣壓高度計和GNSS測量結果進行處理。同時,通過計算歐氏距離構建數據空間,提出一種基于移動方差的自適應門限檢測方法。試驗結果表明,在虛警率為10-6的情況下,檢測率達到了92%,所提方法能夠在高程信息上有效監測潛在的欺騙威脅,增強了GNSS系統的可靠性。
關鍵詞:
氣壓高度計; 衛星導航; 高度數據融合; 移動方差; 欺騙檢測
中圖分類號:
TN 967.1
文獻標志碼: A""" DOI:10.12305/j.issn.1001-506X.2024.05.03
GNSS spoofing jamming detection based on altimeter assistance
XU Yiyu1, CHEN Changfeng2, YUAN Xuelin1,*, CHEN Zhengkun1, ZHOU Zhijian1
(1. School of Electronic and Communication Engineering, Sun Yat-Sen University, Shenzhen 518107, China;
2. Southwest China Research Institute of Electronic Equipment, Chengdu 610036, China)
Abstract:
The barometric altimeter can obtain accurate elevation data without being affected by external electromagnetic interference. The use of barometric altimeters to assist the global navigation satellite system(GNSS) in spoofing detection has significant advantages. In order to evaluate the ability of the barometric altimeter in GNSS spoofing detection and improve detection probability, the system error is first modeled and analyzed, and the differential integrated autoregressive moving average (ARIMA) model is used to process the barometric altimeter and GNSS measurement results. Meanwhile, a self-adaptive threshold detection method based on moving variance is proposed by calculating Euclidean distance to construct a data space. The experimental results show that with a 1 alarm rate of 10-6, the detection rate reaches 92%, and the proposed method can effectively monitor potential spoofing threats on elevation information, which enhances the reliability of the GNSS system.
Keywords:
barometric altimeter; satellite navigation; altitude data fusion; moving variance; spoofing detection
0 引 言
目前,隨著全球導航衛星系統(global navigation sate-llite system, GNSS)的發展,衛星導航技術已被廣泛應用于各行各業,支撐著許多現代系統,可以為智能終端、汽車、飛機、游輪等提供定位和導航服務,也可以為電網和通信網絡等提供授時服務[1]。然而,衛星信號仍然具有許多明顯的缺陷,例如容易受到干擾和欺騙,這就將其脆弱性暴露了出來。
欺騙干擾指的是通過向目標設備發射由欺騙干擾機生成的虛假信號或經相關處理的真實衛星信號,誘使接收機鎖定該欺騙信號,并誤導目標得到錯誤的導航定位結果[2-3],以此達到欺騙目的。
近年來,欺騙干擾的案例層出不窮。例如,2017年,在黑海上航行的數十艘船只報告稱,其全球定位系統(global positioning system, GPS)設備出現故障,定位設備顯示這些船只停靠在內陸。2019年,芬蘭某些機場的GPS信號受到了有意干擾,導致大批民航客機上的導航設備受到影響,飛機滯飛。在無人駕駛領域,多項研究表明大部分無人駕駛汽車存在GNSS安全性漏洞。2020年,在特斯拉駕駛測試過程中,一輛使用自動駕駛導航(navigate on autopilot, NOA)系統的特斯拉Model 3由于被欺騙而駛離了預定路線。以上這些案例都有力地證明了GNSS信號的脆弱性[4],因此研究GNSS欺騙干擾檢測方法對GNSS安全、可靠而言意義重大。
目前,將輔助無源器件結合GNSS進行欺騙檢測已經成為研究熱點。Lee等[5]利用加速度計并通過監測其輸出信息與GPS輸出參數是否一致,實現對欺騙信號的檢測。Curran等[6]研究了慣性測量單元(inertial measurement unit, IMU)在GNSS欺騙檢測中的應用,并使用低成本的IMU輔助進行欺騙檢測。Lo 等[7]則使用了低成本加速度計來檢測慣性傳感器和GNSS位置之間的差異。雖然上述利用外界輔助信息的欺騙檢測方法在短時間內具有良好的抗欺騙干擾能力,但慣性設備的精度會隨時間的增加而不斷下降,需要定期校準,很難大范圍推廣應用。Borio和Lee等[8-9]研究了在智能終端中使用氣壓計等無源傳感器進行GNSS欺騙檢測,但沒有單獨驗證氣壓計所起的作用,而本文更深入地研究了氣壓高度計在GNSS欺騙檢測中所起的輔助作用。
對于測高而言,GNSS雖然能夠提供精度較高的用戶終端位置信息,但其輸出頻率較低。在峽谷、隧道、森林等復雜遮擋環境中,GNSS信號容易出現失鎖并造成捕獲困難或信號丟失,在垂直方向上的精度因子(dilution of precision, DOP)值較差[10-11],此時若欺騙干擾機發射欺騙信號,很容易實現對用戶位置等信息的欺騙。
氣壓高度計具有成本低、結構簡單、無累計誤差、不受無線電干擾等優點[12-14]。根據博世官方公布的BMP380氣壓計參數,該氣壓計的相對壓力精度為0.06 hPa,相當于0.5 m,遠小于GPS系統的垂直方向誤差[15]。因此,利用氣壓高度計輔助GNSS進行欺騙檢測便能彌補GNSS信號在垂直方向上DOP值較差這一缺陷,提高導航服務的精度、魯棒性以及連續性。
針對越來越復雜的欺騙干擾場景,本文提出了一種氣壓高度計輔助GNSS進行欺騙檢測的方法,利用整合移動平均自回歸(autoregressive integrated moving average, ARIMA)模型對氣壓高度計和GNSS測量結果進行降噪,提高數據精度與容錯性,并提出了基于移動方差的自適應門限檢測方法,該門限可以直接作為檢測參量進行GNSS欺騙信號檢測。
1 系統誤差模型及降噪處理
對欺騙信號的檢測、驗證可以視為二元信號檢測問題[16]。H0假設為欺騙信號不存在,H1假設為欺騙信號存在,這兩個假設可以描述如下:
=0,H0:欺騙信號不存在
1,H1:欺騙信號存在(1)
在該假設下,有4種可能出現的判決結果,本文只考慮利用虛警概率和檢測概率作為評價系統檢測性能的指標。其中,虛警概率Pfa是欺騙信號不存在而系統做出誤判的概率;檢測概率PD是欺騙信號存在且系統做出正確判斷的概率。后文將會詳細展開討論檢測概率與門限的推導。
數據處理過程和欺騙檢測原理如圖1所示。其中,氣壓高度計的海拔高度信息可以通過氣壓讀數并使用壓高方程進行計算獲得,而GNSS的海拔高度信息可以通過NMEA 0183協議中的全球定位系統固定數據(global positioning system fix data, GGA)語句獲取。在獲取數據后,通過求解兩者海拔高度間的歐氏距離并推算自適應門限,最后進行門限檢測,即可判斷欺騙信號是否存在。
在實際場景中,直接得到的高度計數據和導航數據會存在噪聲,并對最終結果產生影響,為了使最終結果精度更高,本文采用ARIMA模型對信號進行降噪處理,首先對各模型進行分析。
1.1 載體運動模型
針對手機等接收載體,首先將載體的運動狀態考慮進來,主要在垂直方向上建立載體運動狀態模型,其模型如下:
hreal=hideal+δa(2)
載體運動時的加速度可以看作一個零均值的平穩一階馬爾可夫過程[17-18],可表示為
jideal=-1τaaideal+na(3)
式中:hreal為載體的真實高度;δa為高度測量誤差;hideal為載體的理想運動高度;aideal為載體運動時的加速度;τa為一階馬爾可夫過程的相關時間;na為白噪聲。
1.2 氣壓-高度計算模型
海拔高度是指地面上某載體的位置高出海平面的垂直距離。用氣壓計測高,其基本原理是:在重力場內隨著海拔的增加,氣壓值呈指數減少,而當氣壓與溫度分布標準化時,可以認為氣壓高度計測得的高度即為海拔高度[19]。據實測,在地面層中,高度每升高100 m,氣壓平均降低0.93 kPa,在高層則小于此數值。表1展示了標準大氣下等壓面和高度的關系。
由于氣壓隨高度的變化會受到諸多因素的影響,常見的影響因素有溫度、時間、緯度等,因此國際上規定使用國際標準大氣ISO2533-1975來避免這些因素的影響。ISO2533-1975規定下的大氣滿足理想氣體方程,同時海拔高度以平均海平面作為參考高度,即零高度。在該條件下,某一點氣溫與高度的關系[20-21]可以表示為
Tr=T0+β(Hr-H0)(4)
式中:H0為標準海平面的高度,規定為0 m;Hr為待測點的海拔高度;T0為標準海平面的氣溫,取288.15 K;β為溫度梯度,取-0.006 5 K/m。
在實際應用中,可以用壓高方程來表示氣壓與高度之間的變化關系[22-24]:
Hr=H0+T0βPrP0-βRg-1(5)
式中:R為空氣氣體常數,取287.05 m2/(s2·K);g為重力加速度,取9.8 m/s2;P0為H0處的氣壓值,取101.325 kPa;Pr為氣壓高度計實時測量的氣壓值。
將各數值代入式(5)并化簡,可得待測點海拔高度Hr與待測點氣壓Pr的關系滿足:
Hr=44 331×1-Pr101.3250.19(6)
當實際生活中有高度測量的需求時,利用此壓高公式,只需代入氣壓高度計的氣壓值,便可直接獲得該點的海拔高度。
1.3 氣壓-高度誤差修正模型
由于國際標準大氣條件適用于待測點高度較低且溫度與參考平面變化幅度不大的情況。而在實際測量中,當待測點的實際大氣條件不滿足國際標準大氣條件時,氣壓-高度計算模型便會存在相應的原理性誤差,需要進行誤差修正。
當前已知的修正方法為修正海平面氣壓法[25-27],其原理為:將氣壓高度計輸出的氣壓值,按標準大氣條件修正到當前平均海平面下的氣壓和高度,即利用氣壓高度計輸出的實際氣壓P1與實際高度H1對標準大氣條件下的氣壓P0和海拔H0進行修正,得到當前平均海平面氣壓近似值P′0及海拔近似值H′0。
修正過程首先以當前平均海平面為基準,將實際氣壓值P1和高度值H1代入式(5),可得
H1=H′0+T′0βP1P′0-βRg-1(7)
式中:T′0為當前平均海平面的溫度。再以標準海平面為基準,將平均海平面參數P′0和H′0代入式(5),可得
H′0=H0+T0βP′0P0-βRg-1(8)
同時,利用當前平均海平面的溫度T′0修正標準海平面基準溫度T0,即有:
T′0=T0+β(H′0-H0)(9)
聯立式(7) ~式(9),便可求解得到修正后基準點的參考氣壓P′0、高度值H′0與溫度T′0。此時,式(5)可修正為
Hr=H′0+T′0βPrP′0-βRg-1(10)
由此,便得到了修正后的氣壓-高度計算模型,利用修正后新基準點的參數,可將氣壓高度計讀取的氣壓值P1代入式(10),重新計算得到氣壓高度計當前所在的高度H2,即可得到當前待測點的實際海拔高度。
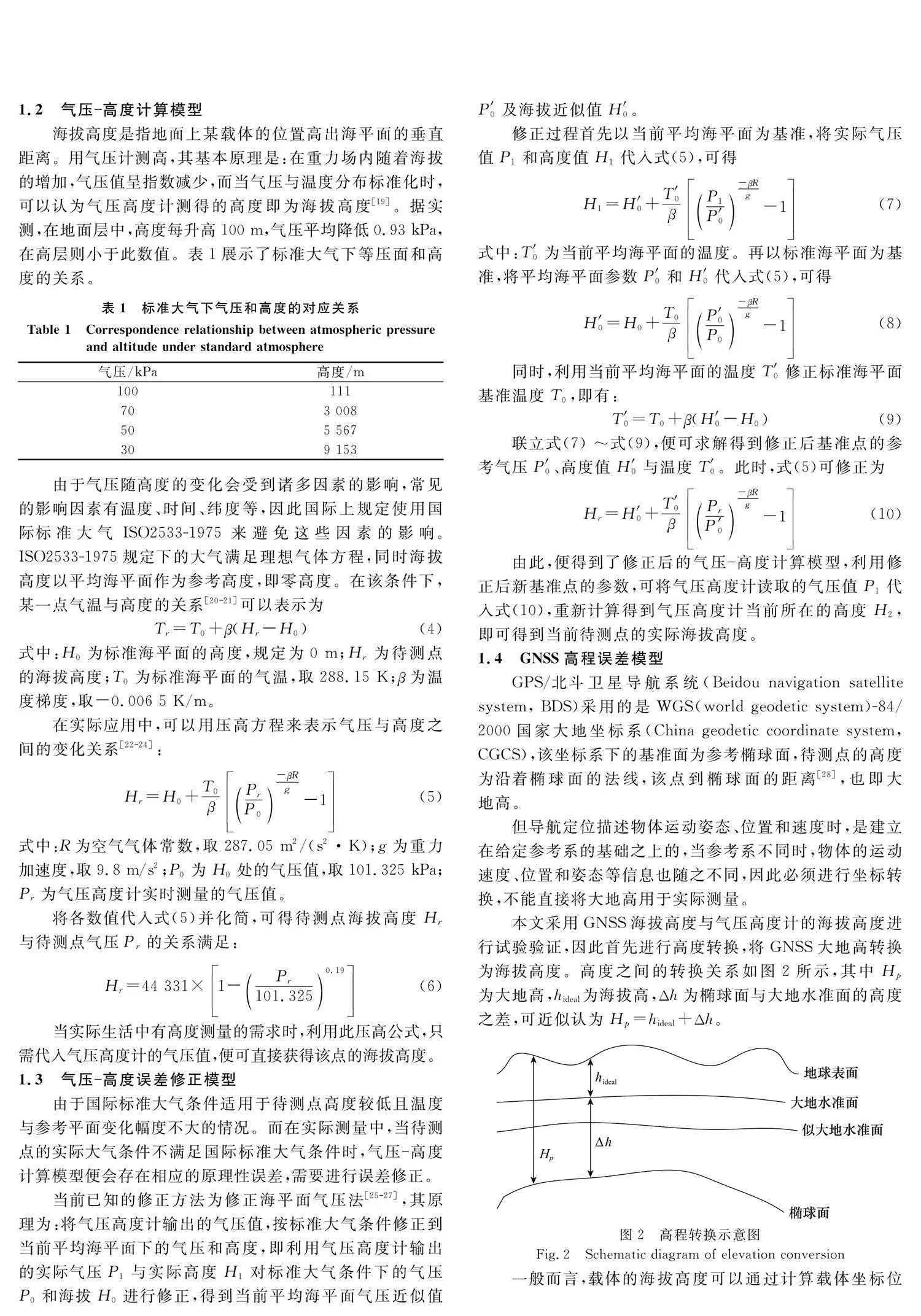
1.4 GNSS高程誤差模型
GPS/北斗衛星導航系統(Beidou navigation satellite system, BDS)采用的是WGS(world geodetic system)-84/2000國家大地坐標系(China geodetic coordinate system, CGCS),該坐標系下的基準面為參考橢球面,待測點的高度為沿著橢球面的法線,該點到橢球面的距離[28],也即大地高。
但導航定位描述物體運動姿態、位置和速度時,是建立在給定參考系的基礎之上的,當參考系不同時,物體的運動速度、位置和姿態等信息也隨之不同,因此必須進行坐標轉換,不能直接將大地高用于實際測量。
本文采用GNSS海拔高度與氣壓高度計的海拔高度進行試驗驗證,因此首先進行高度轉換,將GNSS大地高轉換為海拔高度。高度之間的轉換關系如圖2所示,其中Hp為大地高,hideal為海拔高,Δh為橢球面與大地水準面的高度之差,可近似認為Hp=hideal+Δh。
一般而言,載體的海拔高度可以通過計算載體坐標位置并轉換到用戶坐標系下得到。此時,可將GNSS的高度測量方程表示為
Hw=hideal+ns(11)
式中:ns為測量引入的噪聲,視為白噪聲。
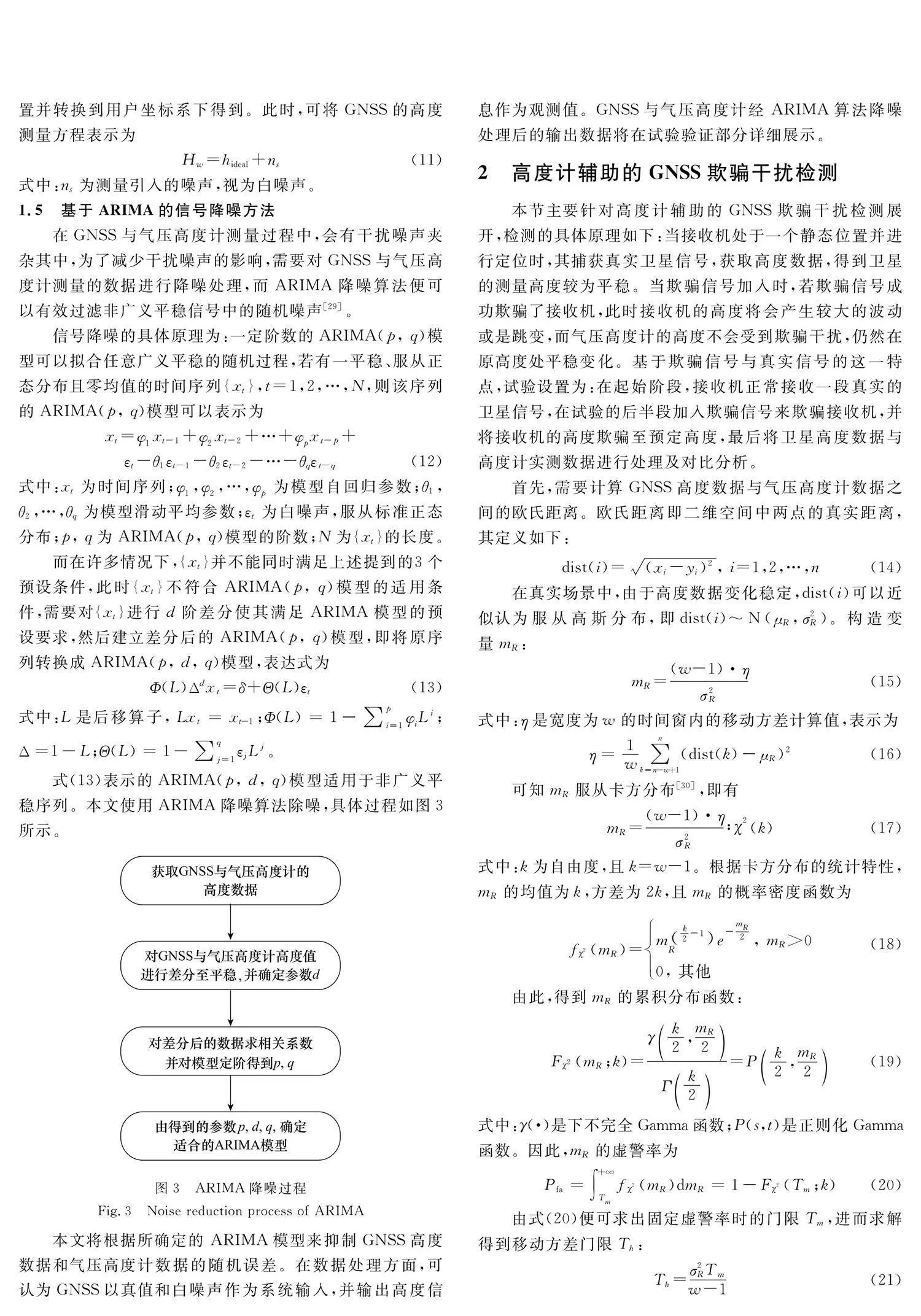
1.5 基于ARIMA的信號降噪方法
在GNSS與氣壓高度計測量過程中,會有干擾噪聲夾雜其中,為了減少干擾噪聲的影響,需要對GNSS與氣壓高度計測量的數據進行降噪處理,而ARIMA降噪算法便可以有效過濾非廣義平穩信號中的隨機噪聲[29]。
信號降噪的具體原理為:一定階數的ARIMA(p, q)模型可以擬合任意廣義平穩的隨機過程,若有一平穩、服從正態分布且零均值的時間序列{xt},t=1,2,…,N,則該序列的ARIMA(p, q)模型可以表示為
xt=φ1xt-1+φ2xt-2+…+φpxt-p+
εt-θ1εt-1-θ2εt-2-…-θqεt-q(12)
式中:xt為時間序列;φ1,φ2,…,φp為模型自回歸參數;θ1,θ2,…,θq為模型滑動平均參數;εt為白噪聲,服從標準正態分布;p, q為ARIMA(p, q)模型的階數;N為{xt}的長度。
而在許多情況下,{xt}并不能同時滿足上述提到的3個預設條件,此時{xt}不符合ARIMA(p, q)模型的適用條件,需要對{xt}進行d階差分使其滿足ARIMA模型的預設要求,然后建立差分后的ARIMA(p, q)模型,即將原序列轉換成ARIMA(p, d, q)模型,表達式為
Φ(L)Δdxt=δ+Θ(L)εt(13)
式中:L是后移算子,Lxt=xt-1;Φ(L)=1-∑pi=1φiLi;Δ=1-L;Θ(L)=1-∑qj=1εjLj。
式(13)表示的ARIMA(p, d, q)模型適用于非廣義平穩序列。本文使用ARIMA降噪算法除噪,具體過程如圖3所示。
本文將根據所確定的 ARIMA模型來抑制GNSS高度數據和氣壓高度計數據的隨機誤差。在數據處理方面,可認為GNSS以真值和白噪聲作為系統輸入,并輸出高度信息作為觀測值。GNSS與氣壓高度計經 ARIMA算法降噪處理后的輸出數據將在試驗驗證部分詳細展示。
2 高度計輔助的GNSS欺騙干擾檢測
本節主要針對高度計輔助的GNSS欺騙干擾檢測展開,檢測的具體原理如下:當接收機處于一個靜態位置并進行定位時,其捕獲真實衛星信號,獲取高度數據,得到衛星的測量高度較為平穩。當欺騙信號加入時,若欺騙信號成功欺騙了接收機,此時接收機的高度將會產生較大的波動或是跳變,而氣壓高度計的高度不會受到欺騙干擾,仍然在原高度處平穩變化。基于欺騙信號與真實信號的這一特點,試驗設置為:在起始階段,接收機正常接收一段真實的衛星信號,在試驗的后半段加入欺騙信號來欺騙接收機,并將接收機的高度欺騙至預定高度,最后將衛星高度數據與高度計實測數據進行處理及對比分析。
首先,需要計算GNSS高度數據與氣壓高度計數據之間的歐氏距離。歐氏距離即二維空間中兩點的真實距離,其定義如下:
dist(i)=(xi-yi)2, i=1,2,…,n(14)
在真實場景中,由于高度數據變化穩定,dist(i)可以近似認為服從高斯分布,即dist(i)~N(μR,σ2R)。構造變量mR:
mR=(w-1)·ησ2R(15)
式中:η是寬度為w的時間窗內的移動方差計算值,表示為
η=1w∑nk=n-w+1(dist(k)-μR)2(16)
可知mR服從卡方分布[30],即有
mR=(w-1)·ησ2R∶χ2(k)(17)
式中:k為自由度,且k=w-1。根據卡方分布的統計特性,mR的均值為k,方差為2k,且mR的概率密度函數為
fχ2(mR)=mk2-1Re-mR2, mR>0
0, 其他(18)
由此,得到mR的累積分布函數:
Fχ2(mR;k)=γk2,mR2Γk2=Pk2,mR2(19)
式中:γ(·)是下不完全Gamma函數;P(s,t)是正則化Gamma函數。因此,mR的虛警率為
Pfa=∫+∞Tmfχ2(mR)dmR=1-Fχ2(Tm;k)(20)
由式(20)便可求出固定虛警率時的門限Tm,進而求解得到移動方差門限Th:
Th=σ2RTmw-1(21)
式中:w為時間窗寬度。
得到移動方差門限后,便可計算檢測概率PD,這需要獲取欺騙環境下的η分布,該分布取決于欺騙攻擊的程度。由于接收機無法獲取欺騙信號的功率變化信息,當存在欺騙信號時,η的分布較為復雜,無法通過推導其概率密度函數來計算PD。因此,本文使用檢測率DR來替代PD。DR定義為時間窗內η(n)超過門限的次數與總樣本數之比,計算DR的具體方法如下:通過Pfa=∫+∞Tmfχ2(mR)dmR=1-Fχ2(Tm;k)計算出給定Pfa時的閾值Tm,并根據Th=σ2RTm/(w-1)計算得到移動方差門限Th,最后在每個檢測窗口處進行欺騙檢測,計算每個窗口處移動方差超過門限的個數。即
DR=Num{(η(n)>Th)}N(22)
此時,二元信號檢測問題進一步表述為,假設H0對應為真實信號與欺騙信號間的移動方差且沒有超過預先設定的門限值,即欺騙攻擊不存在。假設H1對應為真實信號與欺騙信號間的移動方差且超過預先設定的門限值,即欺騙攻擊存在。這兩個假設可以描述如下:
=var(real,spoofing)<Th,H0
var(real,spoofing)≥Th,H1(23)
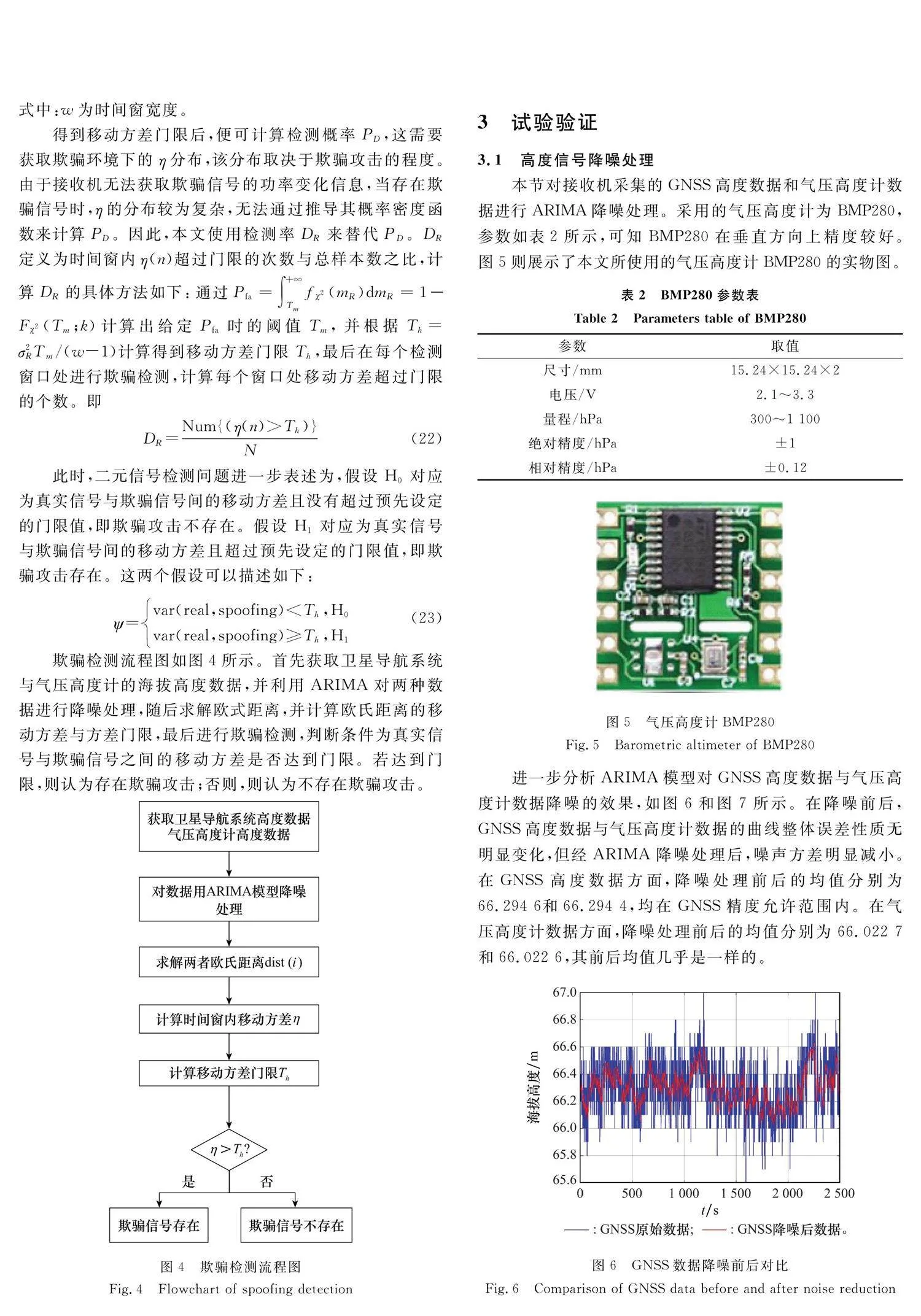
欺騙檢測流程圖如圖4所示。首先獲取衛星導航系統與氣壓高度計的海拔高度數據,并利用ARIMA對兩種數據進行降噪處理,隨后求解歐式距離,并計算歐氏距離的移動方差與方差門限,最后進行欺騙檢測,判斷條件為真實信號與欺騙信號之間的移動方差是否達到門限。若達到門限,則認為存在欺騙攻擊;否則,則認為不存在欺騙攻擊。
3 試驗驗證
3.1 高度信號降噪處理
本節對接收機采集的GNSS高度數據和氣壓高度計數據進行ARIMA降噪處理。采用的氣壓高度計為BMP280,參數如表2所示,可知BMP280在垂直方向上精度較好。圖5則展示了本文所使用的氣壓高度計BMP280的實物圖。
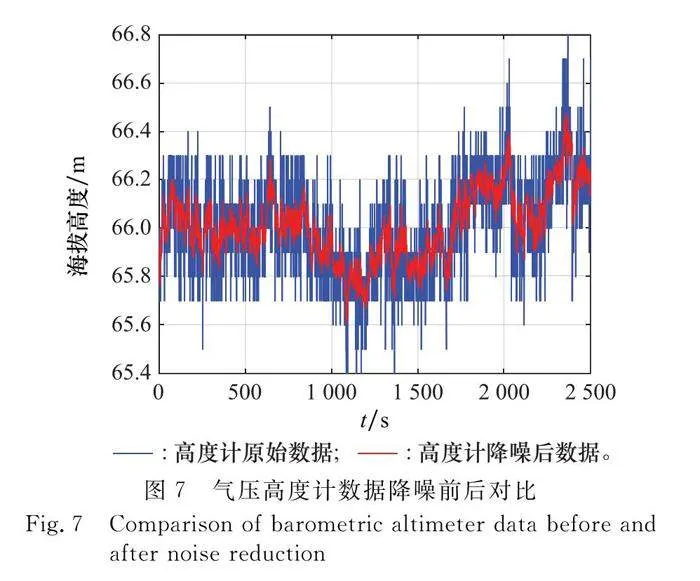
進一步分析ARIMA模型對GNSS高度數據與氣壓高度計數據降噪的效果,如圖6和圖7所示。在降噪前后,GNSS高度數據與氣壓高度計數據的曲線整體誤差性質無明顯變化,但經ARIMA降噪處理后,噪聲方差明顯減小。在GNSS高度數據方面,降噪處理前后的均值分別為66.294 6和66.294 4,均在GNSS精度允許范圍內。在氣壓高度計數據方面,降噪處理前后的均值分別為66.022 7和66.022 6,其前后均值幾乎是一樣的。
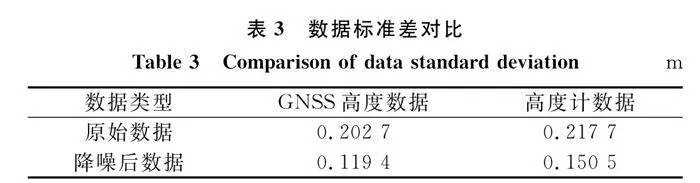
另外,從表3也可得知,經ARIMA降噪處理后的GNSS高度數據和氣壓高度計數據標準差更小,遠優于原始數據的標準差。這說明該降噪處理方法能夠有效抑制GNSS與氣壓高度計實測數據中的隨機噪聲,提高了數據精度和容錯性。
3.2 欺騙檢測結果分析
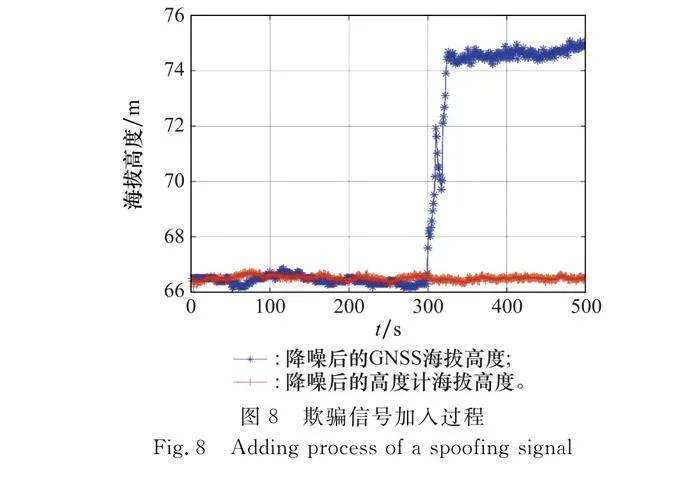
本節設置如下試驗來檢測接收機接收到的衛星信號中是否存在欺騙信號:在接收機接收的前半段時間內播發真實衛星信號,在后半段時間內加入欺騙衛星信號,并將得到的高度數據進行處理分析。試驗過程如圖8所示,前300 s時間內為接收機接收真實信號的情況,可以看到GNSS高度值與氣壓高度計高度值基本在一個小范圍內平穩變化。在300 s前后加入欺騙信號后,接收機接收到的GNSS高度值發生了明顯的跳變,由原來的66 m附近的定位高度跳變到75 m附近。由此可見,當加入欺騙信號時,衛星高度數據對比原真實衛星數據將會產生較大變化。而高度計數據在欺騙信號加入前后均無較大起伏波動,說明此時接收機的定位位置無明顯變化,參照GNSS高度數據和氣壓高度計測高數據,可以初步判斷有欺騙信號加入。
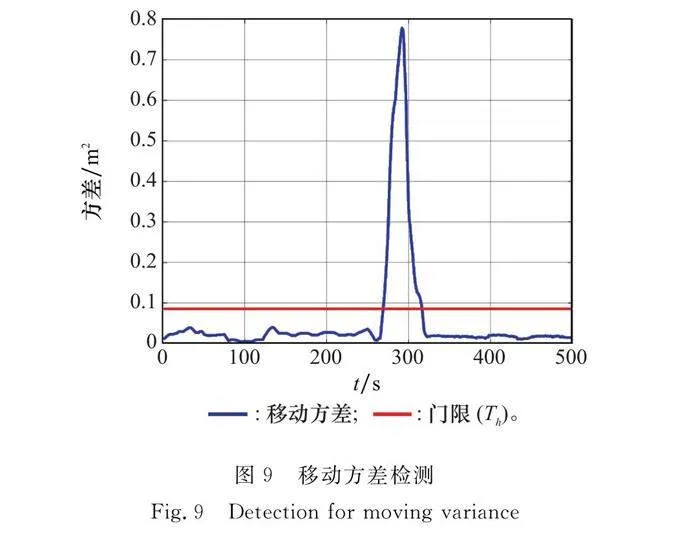
本文采用的是恒虛警率檢測,并設定虛警率Pfa為10-6,窗口寬度為35 s,并根據式(21)計算移動方差門限。由圖9所示,在欺騙信號未加入時,GNSS與氣壓高度計高度值之間的歐式距離方差值始終未超過門限,在欺騙信號加入的這段時間內,兩者歐氏距離的方差值發生了明顯激增,由原來0.03 m2左右的移動方差激增到峰值為0.78 m2的移動方差,遠遠超過了自適應門限Th。因此,判定此時有欺騙攻擊的存在。
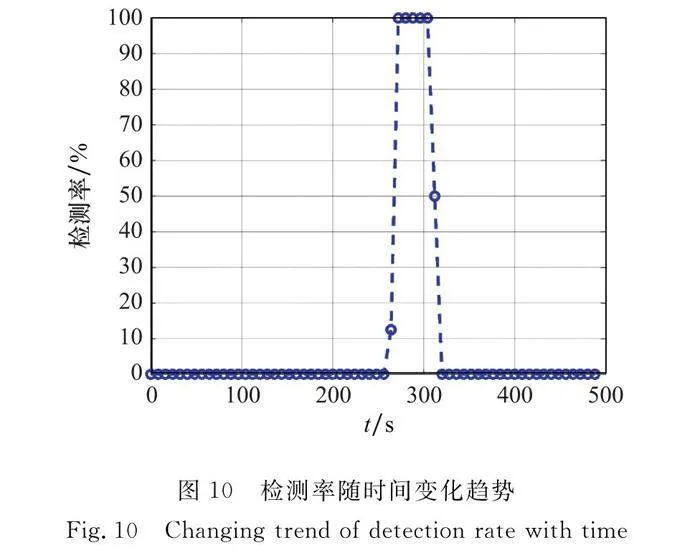
移動方差算法檢測效果如圖10所示,從圖中可知,基于移動方差的算法檢測率在前270 s內基本為0,在270 s至320 s時間范圍內的檢測率幾乎是100%。這是由于欺騙信號是在300 s前后加入的,此時GNSS與氣壓高度計高度值之間歐氏距離的方差發生了突變。在320 s之后,由于已經將接收機欺騙到預定高度,因此檢測率與前270 s的一致,基本為0。
本文使用接受者操作特征(receiver operating characteristic, ROC)曲線來衡量欺騙信號的檢測效果。ROC曲線描述了真正率(true positive rate, TPR)和假正率(1 positive rate, FPR)之間的關系。對于欺騙檢測而言,可以將其簡化為是否存在欺騙信號,也即分類問題。TPR和FPR定義分別如下:
TPR=TPTP+FN(24)
FPR=FPFP+TN(25)
式中:TP為真正,其對應真值為1且預測也為1的正確預測;FP為假正,其對應真值為0且預測為1的錯誤預測;TN為真負,其對應真值為0且預測也為0的正確預測;FN為假負,其對應真值為1且預測為0的錯誤預測。
ROC曲線下面積(area under curve, AUC)用于對模型的性能以及整體準確性進行評估。AUC值越接近1,模型性能越好[31],AUC定義如下:
AUC=S0-n0(n0+1)/2n0n1(26)
式中:n0是正樣本的數量;n1是負樣本的數量,且S0=∑n0i=1ri。
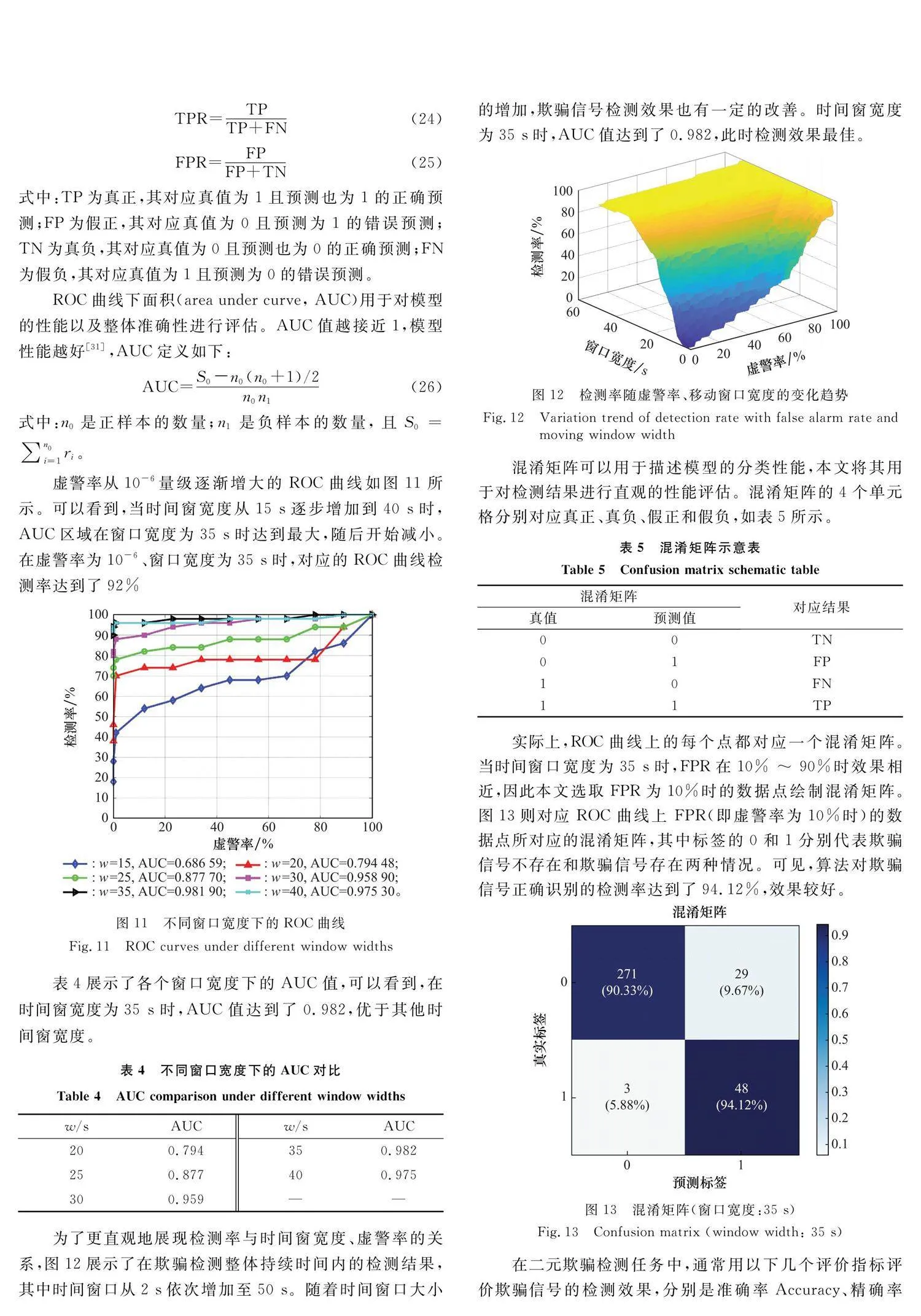
虛警率從10-6量級逐漸增大的ROC曲線如圖11所示。可以看到,當時間窗寬度從15 s逐步增加到40 s時,AUC區域在窗口寬度為35 s時達到最大,隨后開始減小。在虛警率為10-6、窗口寬度為35 s時,對應的ROC曲線檢測率達到了92%
表4展示了各個窗口寬度下的AUC值,可以看到,在時間窗寬度為35 s時,AUC值達到了0.982,優于其他時間窗寬度。
為了更直觀地展現檢測率與時間窗寬度、虛警率的關系,圖12展示了在欺騙檢測整體持續時間內的檢測結果,其中時間窗口從2 s依次增加至50 s。隨著時間窗口大小的增加,欺騙信號檢測效果也有一定的改善。時間窗寬度為35 s時,AUC值達到了0.982,此時檢測效果最佳。
混淆矩陣可以用于描述模型的分類性能,本文將其用于對檢測結果進行直觀的性能評估。混淆矩陣的4個單元格分別對應真正、真負、假正和假負,如表5所示。
實際上,ROC曲線上的每個點都對應一個混淆矩陣。當時間窗口寬度為35 s時,FPR在10% ~ 90%時效果相近,因此本文選取FPR為10%時的數據點繪制混淆矩陣。圖13則對應 ROC 曲線上 FPR(即虛警率為10%時)的數據點所對應的混淆矩陣,其中標簽的0和1分別代表欺騙信號不存在和欺騙信號存在兩種情況。可見,算法對欺騙信號正確識別的檢測率達到了94.12%,效果較好。
在二元欺騙檢測任務中,通常用以下幾個評價指標評價欺騙信號的檢測效果,分別是準確率Accuracy、精確率Precision、召回率Recall和F1分數[32],具體表示如下:
Accuracy=TP+TNTP+FN+FP+TN(27)
Precision=TPTP+FP(28)
Recall=TPTP+FN(29)
F1=2·Precision·RecallPrecision+Recall(30)
式中:準確率指系統正確預測的導航信號占總導航信號數的百分比;精確率指的是在所有被預測為欺騙信號的導航信號中,實際為欺騙信號的概率;召回率指實際為欺騙信號的所有導航信號中,被預測為欺騙信號的概率;F1分數則綜合兼顧了精確率和召回率這兩個指標。
表6顯示了不同窗口寬度下的欺騙檢測效果,從表6可知,在窗口寬度為35 s時,欺騙檢測效果優于其他窗口寬度,同時召回率達到了94.12%。值得一提的是,由于欺騙場景的總時長相比于無欺騙場景的時長更短,精確率總體較低,在這種情況下,即使是在窗口寬度為35 s的情況下,F1分數也只能達到75%。
4 結 論
本文使用ARIMA模型對GNSS數據與高度計數據進行降噪,提高了GNSS高度數據與氣壓高度計數據的精度,同時提出了一種基于移動方差的自適應門限檢測方法。試驗結果表明,在移動窗口寬度為35 s、虛警率為10-6的情況下,對欺騙信號的檢測率達到了92%。
低成本高度計已經獲得成功應用,根據高度計數據的實時反饋,可以對GNSS欺騙信號進行輔助檢測。本文所提基于氣壓高度計的 GNSS 欺騙檢測方法能夠在高程信息上有效地檢測可能存在的欺騙信號,增強了GNSS系統的可靠性。
參考文獻
[1] 邊少鋒, 胡彥逢, 紀兵. GNSS欺騙防護技術國內外研究現狀及展望[J]. 中國科學: 信息科學, 2017, 47(3): 275-287.
BIAN S F, HU Y F, JI B. Research status and prospect of GNSS spoofing protection technology at home and abroad[J]. Scientia Sinica Informationis, 2017, 47(3): 275-287.
[2] PSIAKI M L, HUMPHREYS T E. GNSS spoofing and detection[J]. Proceedings of the IEEE, 2016, 104(6): 1258-1270.
[3] BROUMANDAN A, LACHAPELLE G. Spoofing detection using GNSS/INS/Odometer coupling for vehicular navigation[J]. Sensors, 2018, 18(5): 1305.
[4] KHAN A M, IQBAL N, KHAN M F. Synthetic GNSS intermediate spoofing data generation using field recorded signals[J]. MethodsX, 2018, 18(5): 1305.
[5] LEE L, KWON K C, AN D S, et al. GPS spoofing detection using accelerometers and performance analysis with probability of detection[J]. International Journal of Control, Automation and Systems, 2015, 13(4): 951-959.
[6] CURRAN J T, BROUMENDAN A. On the use of low cost IMUs for GNSS spoofing detection in vehicular applications[C]∥Proc.of the International Technical Symposium on Navigation and Timing, 2017.
[7] LO S, CHEN Y H, REID T, et al. The benefits of low cost accelerometers for GNSS anti-spoofing[C]∥Proc.of the ION Pacific PNT Meeting, 2017: 775-796.
[8] BORIO D. An experimental evaluation of global navigation sate-llite system/inertial navigation system-verification strategies for vehicular applications[J]. IEEE Intelligent Transportation Systems Magazine, 2020, 12(3): 25-35.
[9] LEE D K, PETIT M, MIRALLES D, et al. Analysis of raw GNSS measurements derived navigation solutions from mobile devices with inertial sensors[C]∥Proc.of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation, 2019: 3812-3831.
[10] LEE D K, MIRALLES D, AKOS D, et al. Detection of GNSS spoofing using NMEA messages[C]∥Proc.of the European Navigation Conference, 2020.
[11] MIRALLES D, LEVIGNE N, AKOS D M, et al. Android raw GNSS measurements as the new anti-spoofing and anti-jamming solution[C]∥Proc.of the 31st International Technical Meeting of the Satellite Division of the Institute of Navigation, 2018: 334-344.
[12] 王昕. 導航接收機中氣壓高度計的設計與實現[D]. 西安: 中國科學院國家授時中心, 2015.
WANG X. Design and implementation of barometric altimeter in navigation receiver[D]. Xi’an: National Time Service Center, Chinese Academy of Sciences, 2015.
[13] XIA H, WANG X G, QIAO Y Y, et al. Using multiple barometers to detect the floor location of smart phones with built-in barometric sensors for indoor positioning[J]. Sensors, 2015, 15(4): 7857-7877.
[14] LEE D K, NEDELKOV F, AKOS D, et al. Barometer based GNSS spoofing detection[C]∥Proc.of the 33rd International Technical Meeting of the Satellite Division of the Institute of Navigation, 2020: 3268-3282.
[15] ENGE P K. The global positioning system: signals, measurements and performance[J]. International Journal of Wireless Information Networks, 1994, 1(2): 83-105.
[16] 王文益, 龔婧, 王金銘. 基于SCB方差的GNSS欺騙式干擾檢測算法[J]. 系統工程與電子技術, 2021, 43(8): 2254-2262.
WANG W Y, GONG J, WANG J M. GNSS spoofing inter-ference detection based on variance of SCB[J]. Systems Engineering and Electronics, 2021, 43(8): 2254-2262.
[17] 胡遠遷, 張全, 牛小驥. 基于一階高斯-馬爾可夫模型的IMU零偏相關時間對GNSS/INS組合導航結果的影響[J]. 科學技術與工程, 2018, 18(34): 236-241.
HU Y Q, ZHANG Q, NIU X J. Influence of IMU zero partial correlation time based on first-order Gauss-Markov model on GNSS/INS integrated navigation results[J].Science Technology and Engineering, 2018, 18(34): 236-241.
[18] RAVEH D E. CFD-based models of aerodynamic gust response[J]. Journal of Aircraft, 2007, 44(3): 888-897.
[19] NASSAR S, EL-SHEIMY N. A combined algorithm of improving INS error modeling and sensor measurements for accurate INS/GPS navigation[J]. GPS Solutions, 2006, 10(1): 29-39.
[20] QIN H T, ZHANG H T, NIU Y J, et al. Altitude data fusion algorithm based on INS and GNSS and barometer[C]∥Proc.of the IEEE 3rd International Conference on Civil Aviation Safety and Information Technology, 2021: 85-90.
[21] LIU X X, ZHAO X B, PANG C L. Research on SINS/GNSS/CNS/pressure altimeter federated filtering adaptive fault tole-rance method[C]∥Proc.of the China Satellite Navigation Conference, 2022: 444-454.
[22] YE L Y, YANG Y K, MA J G, et al. A distributed formation joint network navigation and positioning algorithm[J]. Mathematics, 2022, 10(10): 1627.
[23] DREVELLE V, BONNIFAIT P. A set-membership approach for high integrity height-aided satellite positioning[J]. GPS Solutions, 2011, 15(4): 357-368.
[24] YUN J, PARK B. A technique for finding indoor rescuer using GNSS and barometer sensors on android smart phones in building disaster situations[C]∥Proc.of the 34th International Technical Meeting of the Satellite Division of the Institute of Navigation, 2021: 1961-1980.
[25] WU P, FENG L, TONG H B, et al. Approximate position estimation method of weak-signal receiver of global navigation satellite systems assisted by barometric altimeter[J]. Traitement du Signal, 2022, 39(3): 945-950.
[26] GUO H, WEI D Y, OUYANG G Z, et al. Research on barometric altimeter assisting GNSS navigation for urban environments[C]∥Proc.of the China Satellite Navigation Conference, 2018: 799-811.
[27] SIMONETTI M, CRESPILLO O G. Robust modeling of geodetic altitude from barometric altimeter and weather data[C]∥Proc.of the 34th International Technical Meeting of the Sate-llite Division of the Institute of Navigation, 2021: 1176-1189.
[28] 魯郁. 北斗/GPS雙模軟件接收機原理與實現技術[M]. 北京: 電子工業出版社, 2016.
LU Y. The principle and realization technology of BDS/GPS dual-mode software receiver[M]. Beijing: Publishing House of Electronics Industry, 2016.
[29] BENVENUTO D, GIOVANETTI M, VASS-ALLO L, et al. Application of the ARIMA model on the COVID-2019 epidemic dataset[J]. Data in Brief, 2020, 29: 105340.
[30] SUN C, WAYN C J, DEMPSTER A G, et al. Moving variance-based signal quality monitoring method for spoofing detection[J]. GPS Solutions, 2018, 22(3): 83.
[31] HAND D J, TILL R J. A simple generalisation of the area under the ROC curve for multiple class classification problems[J]. Machine Learning, 2001, 45(2): 171-186.
[32] ZHU X F, HUA T, YANG F, et al. Global positioning system spoofing detection based on support vector machines[J]. IET Radar, Sonar Navigation, 2022, 16(2): 224-237.
作者簡介
徐奕禹(1998—),男,碩士研究生,主要研究方向為導航安全、衛星導航欺騙干擾檢測。
陳長風(1991—),男,工程師,碩士,主要研究方向為電子對抗技術、導航技術。
袁雪林(1979—),男,副教授,博士,主要研究方向為導航安全、UWB精密測量、室內定位。
陳正坤(1991—),男,博士研究生,主要研究方向為GNSS多波束智能感知、GNSS/INS深組合導航、智能可信導航。
周志健(1998—),男,碩士研究生,主要研究方向為新型導航接收機設計。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
光學精密工程(2016年6期)2016-11-07 09:07:19