面向空地中繼網絡優化的無人機運動控制方法
2024-11-22 00:00:00陶燦燦周銳
系統工程與電子技術 2024年5期





摘 要:
本文提出一種基于模型的通信中繼無人機運動控制方法,旨在提高地面車輛編隊的網絡連通性和通信性能。通過聯合考慮未知多用戶移動性、環境對信道特性的影響以及接收信號的不可用到達角信息來解決中繼無人機運動控制問題。該方法主要由兩部分構成:① 利用圖論中的最小生成樹構建網絡連接性并定義通信性能指標,該網絡連接性同時考慮了地面節點與無人機的通信鏈路及地面節點與地面節點的通信鏈路;② 針對移動節點的通信中繼,提出一種改進粒子群優化(particle swarm optimization, PSO)和非線性模型預測控制(nonlinear model predictive control, NMPC)相結合的中繼無人機運動控制策略,其中移動節點的未來位置由卡爾曼濾波器進行預測。在單一環境和復雜環境下的仿真結果表明,所提出的運動控制方法可以驅使無人機到達或跟蹤最優中繼位置的運動并提高網絡性能,同時論證了考慮環境對信道的影響是有益的。
關鍵詞:
無人機; 中繼通信; 運動控制; 最小生成樹; 非線性模型預測控制; 改進粒子群優化
中圖分類號:
TP 301
文獻標志碼: A""" DOI:10.12305/j.issn.1001-506X.2024.05.24
A method of UAV motion control to optimize air-ground relay network
TAO Cancan*, ZHOU Rui
(School of Automation Science and Electrical Engineering, Beihang University, Beijing 100191, China)
Abstract:
In this paper, a model-based motion control method for communication relay unmanned aerial vehicle is proposed to improve the network connectivity and communication performance of ground vehicle formation. The problem of relay unmanned aerial vehicle motion control is solved by considering the unknown multi-user mobility, the impact of the environment on the channel characteristics and the unavailable arrival angle information of the received signal. The method is mainly composed of two parts: (i) The minimum spanning tree in graph theory is used to construct network connectivity and define communication performance indicators. The network connectivity takes into account the communication links between ground nodes and unmanned aerial vehicles and between ground nodes and ground nodes; (ii) For the communication relay of mobile nodes, a relay unmanned aerial vehicle motion control strategy combining improved particle swarm optimization (PSO) and nonlinear model predictive control (NMPC) is proposed, in which the future position of mobile nodes is predicted by a Kalman filter. The simulation results in a single and complex environment show that the proposed motion control method can drive the unmanned aerial vehicle to reach or track the optimal relay position and improve the network performance. At the same time, it is beneficial to consider the influence of environment on the channel.
Keywords:
unmanned aerial vehicle; relay communication; motion control; minimum spanning tree; nonlinear model predictive control (NMPC); improved particle swarm optimization (PSO)
0 引 言
近幾十年來,在各種任務中利用協同多智能體實現目標顯示出極大的優勢,這些任務種類繁多,包括民用搜索與救援[1]、環境傳感與監測[2]、監視與偵察[3]、野外消防[4]以及其他科學研究。多智能體系統的一個關鍵要求是實現和優化用于信息交換目的的通信質量。然而,距離的增加和周圍地形、建筑物等障礙會嚴重影響無線通信的質量,使得用戶很難實現這一要求[5]。
為了解決這個問題,可以部署通信中繼來支持系統的信號傳輸[6]。配備無線收發器的無人機被認為是實現這一目的的理想選擇,使用無人機作為通信中繼的優勢有:① 相對于地面或衛星中繼,具有更好的中繼性能[7],例如與受到地形或建筑物等障礙物影響的地對地情況相比,地對空通信中的信號衰減較小;② 無需人工參與的無人機中繼,具有強生存力和高適應性的優勢,特別是在惡劣環境中[8];③ 無人機速度快,機動靈活,可以在需要時快速部署,例如在部分通信鏈路故障時,可以通過中繼無人機快速恢復通信。
然而,中繼無人機運動控制問題與無線信號傳播的屬性密切相關,受環境影響,且無人機自身有運動約束,使得控制中繼無人機的運動成為一個真正的挑戰。
人們對使用無人機作為通信中繼越來越感興趣,并提出多種方法來優化無人機中繼網絡的性能。Ono等人[9]提出一種可變速率中繼方法,在發生災害時實現多個地面節點之間的通信,其中設計了中繼無人機的轉彎半徑和飛行高度。Mozaffari等人[10]提出一個用于優化中繼無人機部署和運動控制的框架,旨在從地面物聯網設備高效節能地收集數據。Krijestorac等人[11]研究了使用深度強化學習方法將無人機連接到位置未知的用戶的中繼部署問題。
其他人則專注于使用無人機作為移動用戶的中繼。Zeng等人[12]提出一種聯合優化發射功率和中繼軌跡的迭代算法,用于最大化移動中繼系統中的吞吐量。Chamseddine等人[13]提出一種移動地面單元的導引律,利用接收信號強度和到達角信息,在不知道地面單元位置的情況下將無人機驅動到最佳中繼位置。Wu等人[14]提出一種基于模型的無人機通信中繼自適應運動控制方法,旨在提高空中多用戶系統的網絡性能。Kim等人[15]和Lun[16]等人提出一種移動節點的中繼無人機運動控制方法,旨在提高艦艇編隊的通信質量。Bor-Yaliniz等人[17]提出一種混合整數非線性優化方法,用于優化面向地面蜂窩節點的中繼無人機三維定位問題,并給出了該問題的一個計算高效的數值解。Ladosz等人[18]提出一種基于學習和模型的混合信道預測方法,用于城市環境下通信中繼無人機的軌跡規劃,實現了更好的性能。Wu等人[19]提出一種基于梯度法和最小二乘估計的中繼無人機運動控制方法,旨在提高地面多用戶系統的網絡性能。
然而,上述研究工作中或是假設用戶是靜態的,這在許多無人機輔助的多智能體系統應用中無法滿足,因為智能體的運動通常由任務決定;或是信道模型過于簡化,會導致優化后的網絡性能較差;或是未考慮復雜環境區域對無線信道的影響,如城市環境中的建筑密度;或是只考慮了無人機與地面節點之間的通信鏈路,而沒有考慮地面節點與地面節點之間的通信鏈路。
在這一背景下,本文提出一種中繼無人機運動控制方法,在考慮無人機運動約束的情況下,將單個無人機驅動到預期位置,以保持網絡的連通性并實現最佳的通信性能。主要有以下兩點貢獻:① 聯合考慮未知多用戶移動性、環境復雜性、接收信號的不可用到達角(angle of arrival, AoA)信息,并且在優化網絡性能的同時,考慮無人機與地面無人車之間的通信鏈路及地面無人車與地面無人車之間的通信鏈路。② 提出一種由最小生成樹(minimum spanning tree, MST)[20]、改進粒子群優化(particle swarm optimization, PSO)和非線性模型預測控制(nonlinear model predictive control, NMPC)相結合的中繼無人機運動控制策略。通過利用地面無人車的運動估計、當前無人機的狀態以及環境信道狀態,找到特定時間范圍內的控制輸入序列,從而優化網絡連接。
1 系統模型
本文研究的動機是利用無人機的通信中繼能力來擴展通信鏈路和提高通信質量[21],主要是針對地面無人車編隊。當地面無人車在缺少衛星通信、彼此相距較遠的惡劣環境中執行任務時,中繼無人機可以為其提供有效的通信連接。
1.1 空地中繼場景
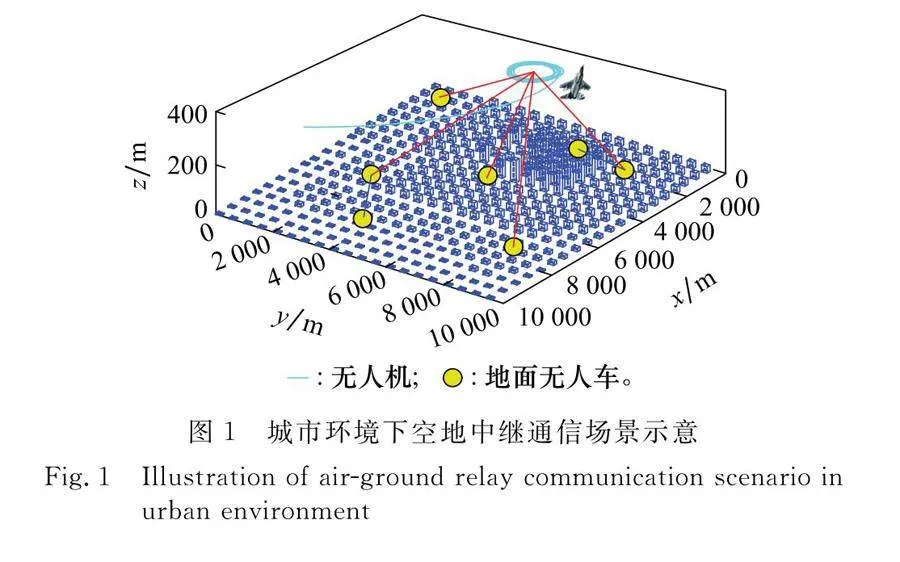
考慮城市環境下由N輛地面無人車ni∈N={n1,n2,…,nN}和一架無人機組成的空地中繼網絡,地面無人車編隊在區域Ω∈R2內執行任務。由于地面無人車之間的通信易受到周圍地形、障礙物、高樓等的影響,因此由配備了更高性能通信設備的固定翼無人機在空中充當中繼,以在地面無人車編隊之間提供更高質量的通信鏈路。值得注意的是,大多數以前關于無人機作為通信中繼的研究,都只考慮了無人機與用戶節點之間的通信鏈路,本文不同之處在于還同時考慮了用戶節點與用戶節點之間的通信鏈路。或者說,本文是在所有可用的通信鏈路中,尋找能夠讓所有節點保持連通的最佳通信網絡。
本文對應的空地中繼示意場景[22]如圖1所示,黃色的圓點代表地面無人車,假設其正在執行自己的任務,長方體是建筑物,紅色實線表示中繼無人機與地面無人機之間的通信鏈路,藍色實線表示地面無人車與地面無人車之間的通信鏈路,青色實線表示中繼無人機的飛行軌跡。
另外,與旋翼機相比,固定翼無人機速度更快,操作范圍更廣。然而,其具有運動約束,例如最小飛行速度和轉彎半徑等。本文使用固定翼無人機作為通信中繼,后續設計中都考慮了這些約束。
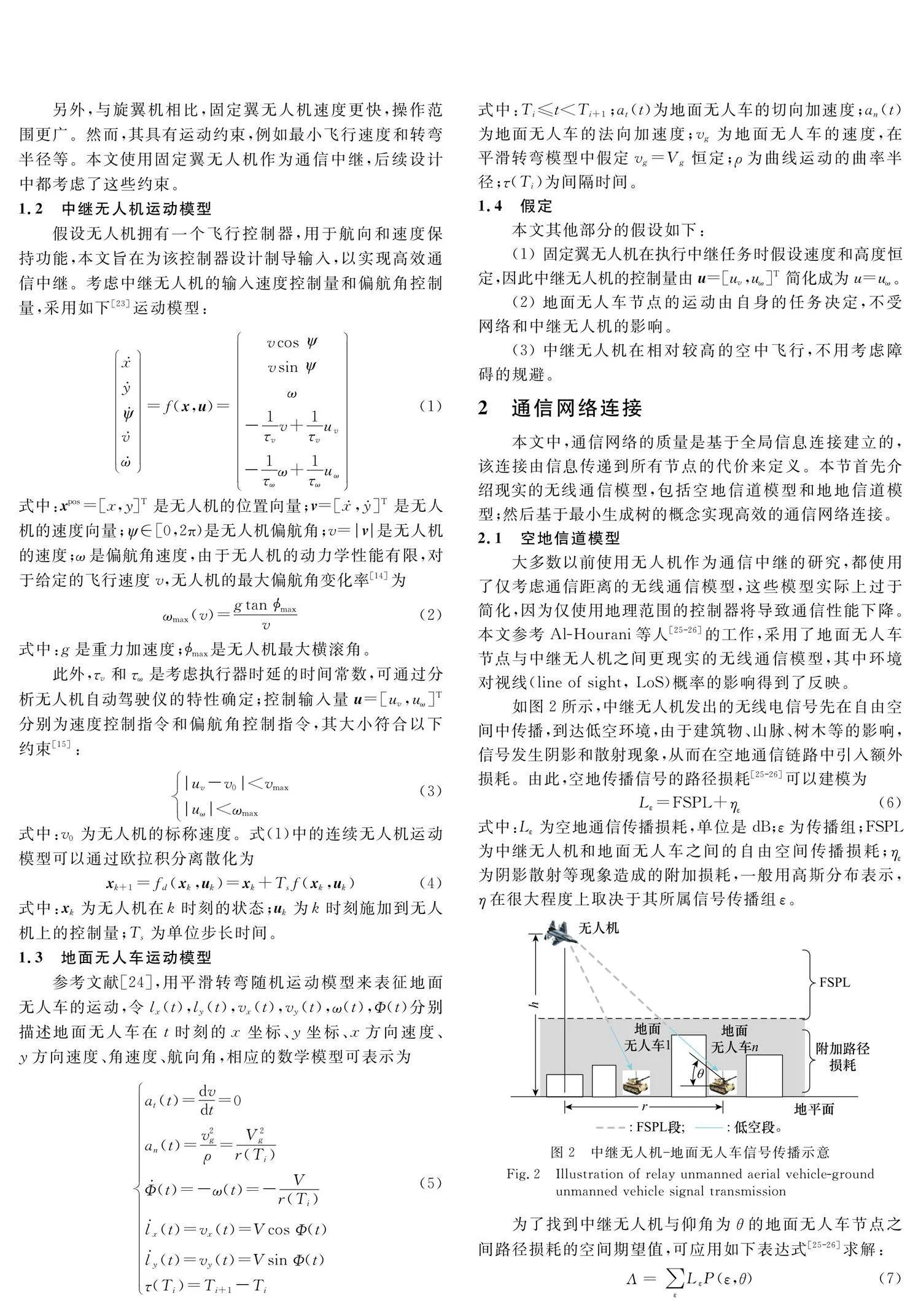
1.2 中繼無人機運動模型
假設無人機擁有一個飛行控制器,用于航向和速度保持功能,本文旨在為該控制器設計制導輸入,以實現高效通信中繼。考慮中繼無人機的輸入速度控制量和偏航角控制量,采用如下[23]運動模型:
3.2.4 改進PSO-NMPC的中繼無人機運動控制
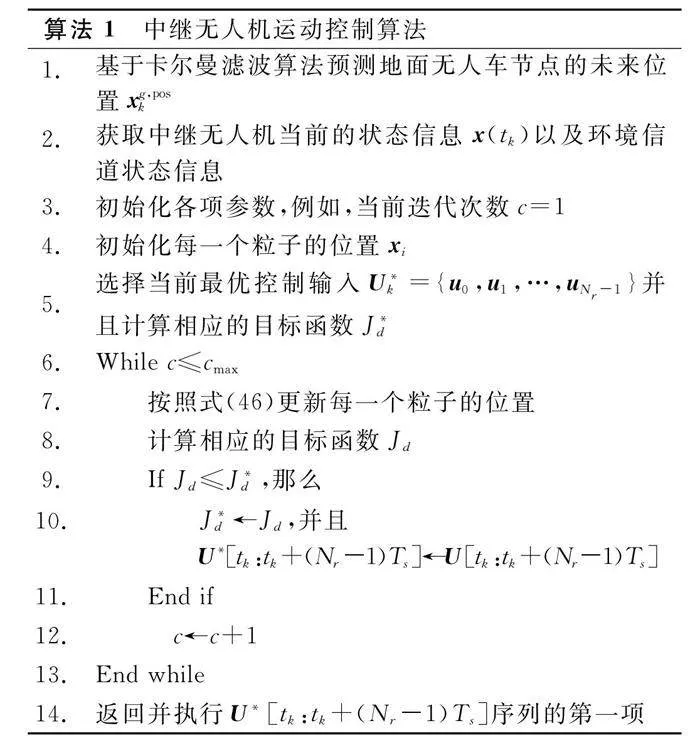
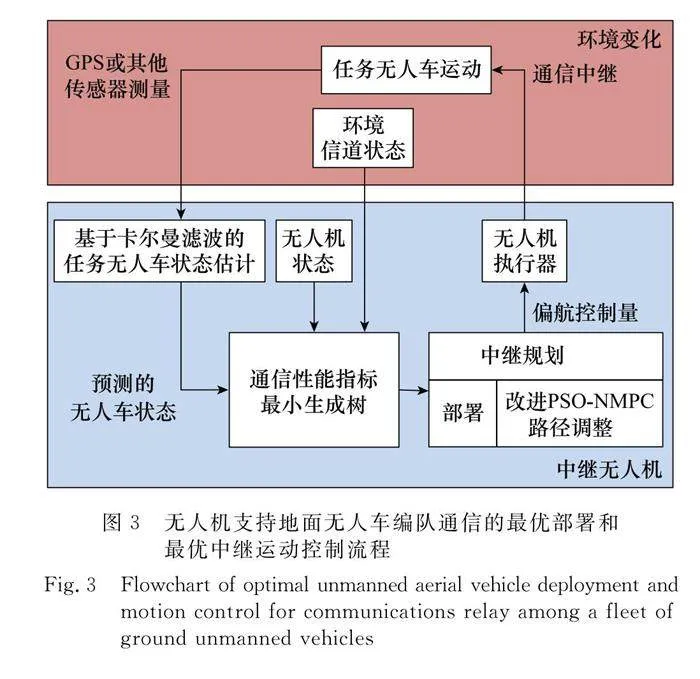
NMPC算法在處理模型復雜、帶約束的多變量非線性優化控制時效果顯著,代價是計算量比較大,而PSO算法具有并行處理、尋優速度快的特點,并且為了進一步提高PSO算法的尋優能力,本文在第3.2.3節中改進了慣性權重ω的取值,進一步提高了算法的尋優速度,同時引入了極值擾動算子改善陷入局部極值的情況。因此,在使用中繼無人機支持移動的地面無人車編隊通信的場景下,考慮到地面無人車編隊的運動和固定翼無人機的約束,本文提出基于改進PSO-NMPC的中繼無人機運動控制策略,將ΔU作為改進PSO算法的優化變量,種群中各個粒子的維數D就等于預測時域Nr,并選取式(34)~式(38)作為計算各個粒子適應度的目標函數,實現步驟如下。
步驟 1
通過利用傳感器數據和濾波技術獲得地面無人車節點的運動狀態估計;
步驟 2
基于預測的地面無人車編隊的位置、無人機當前的狀態、當前控制輸入序列以及環境信道狀態,計算目標函數的值;
步驟 3
利用改進PSO算法迭代優化目標函數,得到最優控制輸入序列U*k;
步驟 4
執行最優控制輸入序列的第一項,并更新狀態;
步驟 5
重復上述步驟直到任務結束。
整個尋優過程對應的偽代碼如算法1所示,基于改進PSO-NMPC算法的中繼無人機運動控制流程如圖3所示。
4 仿真結果與討論
4.1 問題和參數
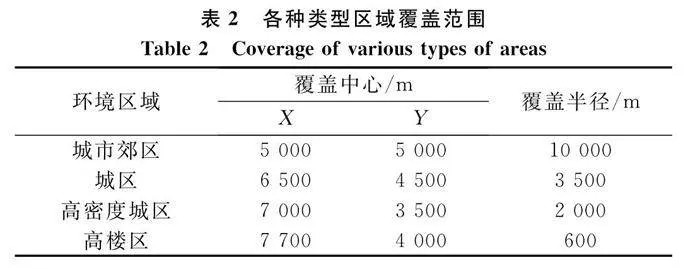
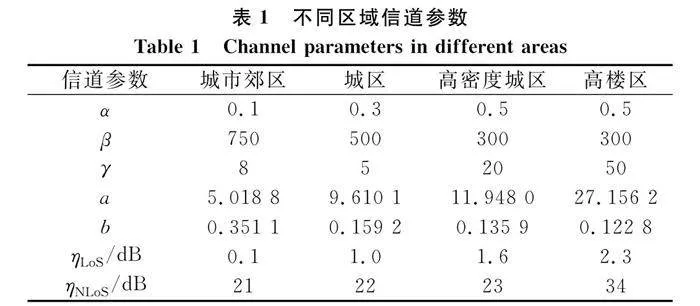
本節通過仿真實驗來驗證提出的中繼無人機支持地面無人車編隊通信的最優部署和最優運動控制方法的可行性,其中平滑轉彎模型[24]用于表示地面無人車節點的運動,中繼無人機無法知道運動用戶的速度和運動方向,只能夠知道其位置。環境區域被分為四種典型類型,即城市郊區、城區、高密度城區、高樓區,其對應的信道參數[25-26]如表1所示,覆蓋范圍如表2所示。
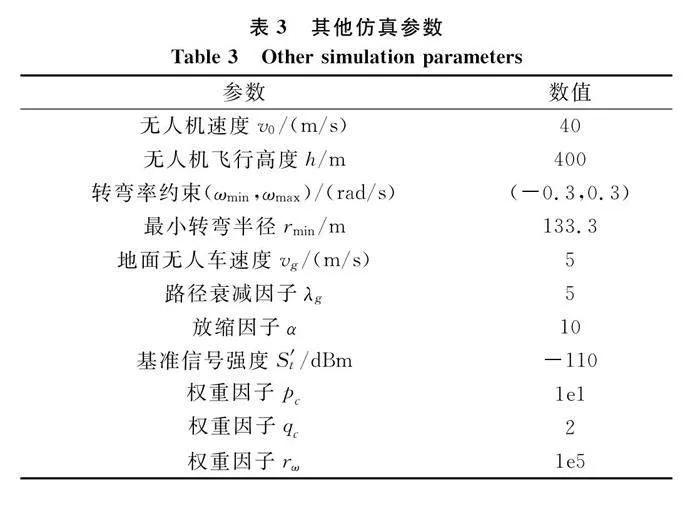
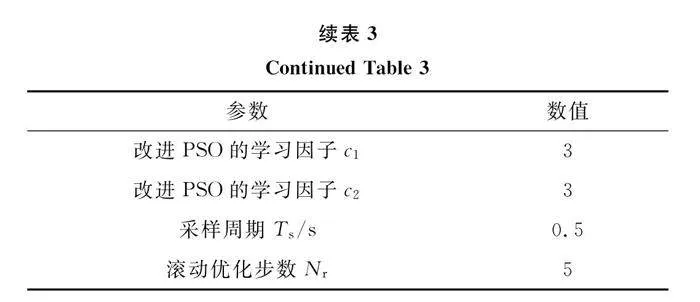
中繼無人機為固定翼,存在運動約束,用于仿真的其他參數如表3所示。注意,隨著地面無人車數量的增加,在網絡中找到最小生成樹解決方案的時間會增加,從而增加整個優化過程的時間。同時,中繼無人機將需要更高的通信帶寬來獲取所有地面無人車節點的信息。因此,所提出的算法可以覆蓋的最大的地面無人車節點數量,需要根據實際的計算和通信資源來決定。對于地面無人車數量過多的情形,有兩種解決方案,一種是通過聚類將地面無人車分類成多個不同的簇,每個簇指派一架無人機進行中繼;另一種解決方案是指派多架無人機為大規模地面無人車集群進行中繼。
另外,性能和采樣時間之間也存在權衡,采樣頻率越快,全局信息連接的性能表現就會越好。但NMPC就需要更重的計算負荷,因為在給定的周期內,滾動優化的步數變得更多。由于地面無人車的移動速度低于空中無人機,為通信中繼產生引導指令的頻率低于中繼無人機自身的飛行控制指令的頻率。基于此,本文仿真使用的采樣時間為Ts=0.5 s。然而,當地面無人車節點在快速移動時,則需要更短的采樣周期來覆蓋空地之間的中繼。在實際應用中,應根據地面無人車節點的數量和中繼無人機的機載計算能力,來確定預測控制的采樣時間Ts。
4.2 靜態節點下中繼部署效果驗證及對比
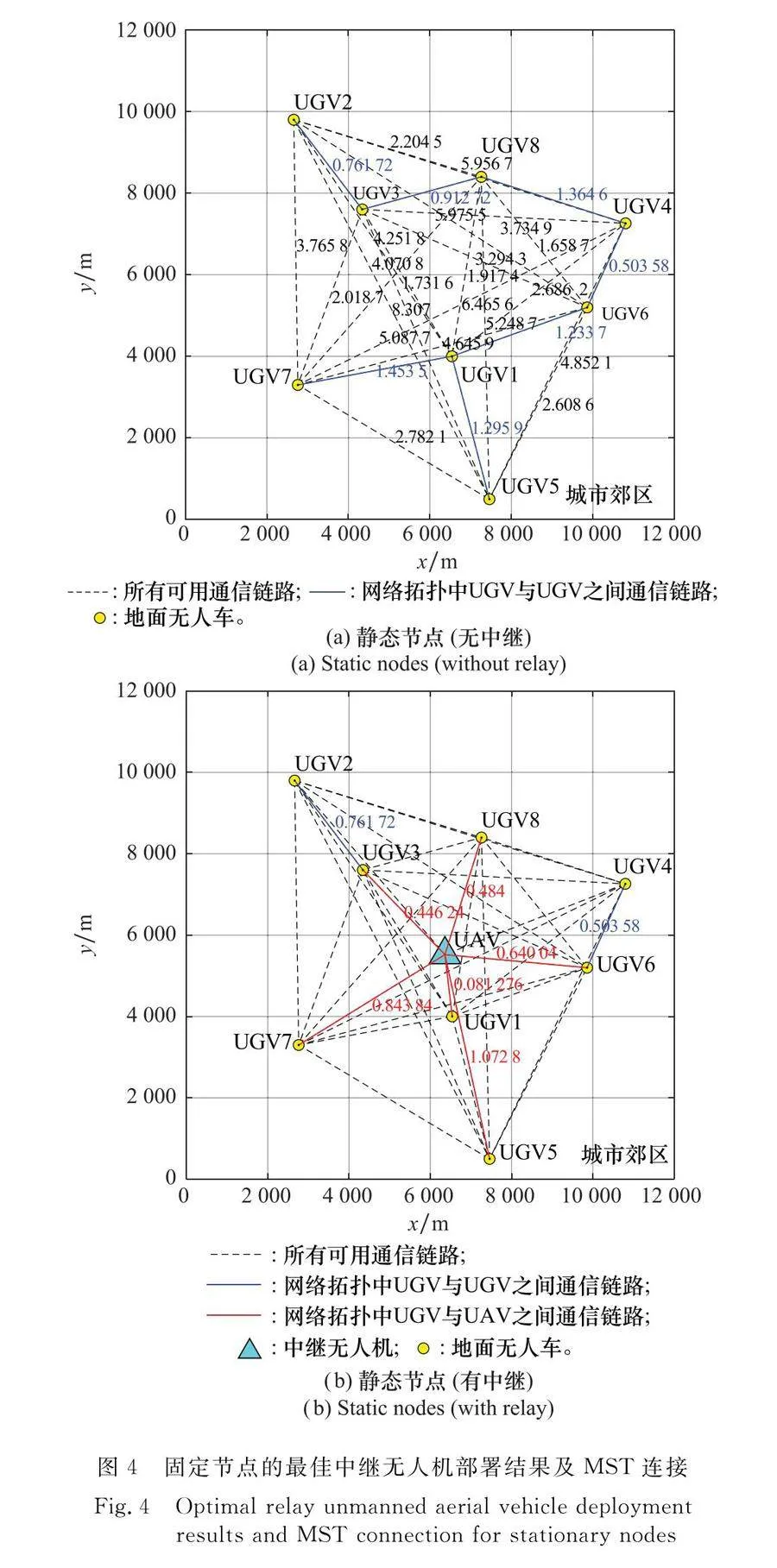
使用中繼無人機支持靜止地面無人車通信是一種簡單且常見的情形,實驗1中,使用無人機作為中繼來支持八輛靜止地面無人車的通信,其中地面無人車的位置分別為(6 540,4 000)、(2 660,9 800)、(4 340,7 600)、(10 800,7 260)、(7 460,500)、(9 860,5 200)、(2 760,3 300)、(7 260,8 400),單位是m,發射功率都為PT=100 mW,信號頻率為fc=2 GHz。
如圖4(a)所示,八輛地面無人車(UGV1~UGV8)分布在12 km×14 km的區域內。圖4(a)中的黑色虛線表示地面無人車節點之間所有可用的通信鏈路,線上的數字顯示了每條通信鏈路傳遞消息的代價,代價越小,信號強度就越大,通信質量也就越好。圖4(a)中的藍色實線顯示了在沒有中繼無人機時,表征八輛地面無人車之間通信網絡拓撲關系的最小生成樹。本例中,全局信息連接的總代價為J=7.525 7。
圖4(b)顯示了在同樣的城市郊區環境下,用單架無人機給地面無人車編隊進行通信中繼的優化MST連接及通信代價。其中,紅色實線表示中繼無人機與地面無人車節點之間的空地通信鏈路,藍色實線表示地面無人車與地面無人車之間的地地通信鏈路。通過無人機優化最佳中繼位置,全局信息連接的總代價變為J=4.833 5。
對比圖4 (a)和圖4(b)可知,部署一個中繼無人機輔助地面無人車編隊通信后,整個網絡的全局信息連接總代價從無中繼時的J=7.525 7,顯著降低到有中繼后的J=4.833 5。這意味著僅為地面無人車編隊部署一個無人機節點進行中繼,就可以提高55%的通信質量,可以預期的是,用于中繼的無人機越多,全局信息連接的成本就越小。
上述實驗1中的兩個對比實驗驗證了本文提出的中繼無人機最優部署和運動控制方法在固定節點下的可行性與高效性。下面接著討論本文方法在移動節點下的實際表現并進行對比實驗分析。
4.3 移動節點下中繼運動控制效果驗證及對比
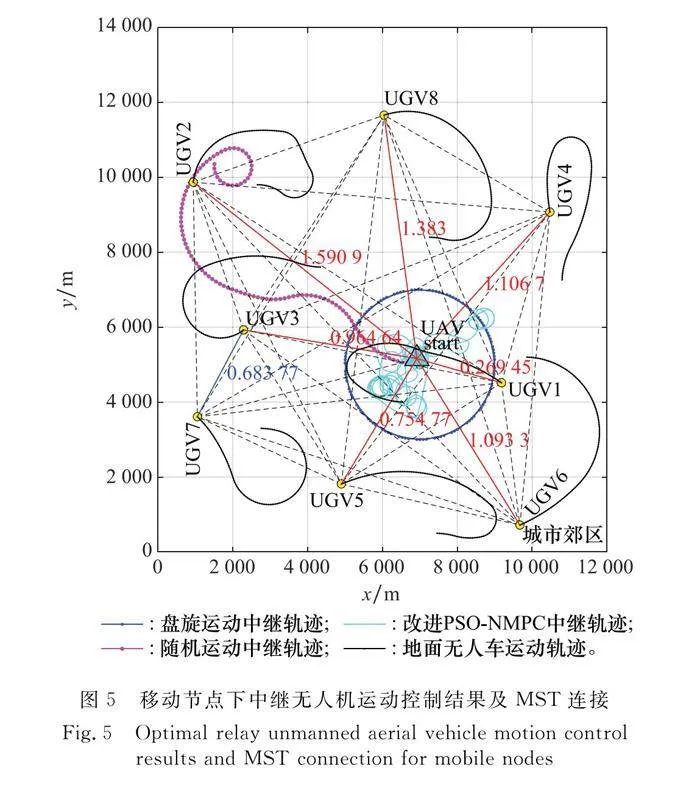
實驗2中,使用無人機作為中繼來支持8輛移動地面無人車的通信,其中地面無人車的運動軌跡根據平滑轉彎模型[24]隨機給出,運動速度為vg=5 m/s,每個地面無人車的發射功率為PT=100 mW。中繼無人機的初始位置為(7 000,5 000),單位是m,飛行速度v0=40 m/s,期望的繞飛半徑為300 m,仿真時間設為1 320 s。
為了突出本文所提方法在移動節點下的中繼運動控制效果,將本文提出的基于改進PSO-NMPC算法的中繼無人機運動控制策略、無人機繞固定中間點盤旋中繼策略、無人機隨機運動中繼策略在相同條件下分別進行仿真實驗,其中,無人機隨機運動由平滑轉彎模型[24]給出。3種中繼策略下的仿真結果如圖5所示,對應的全局信息連接代價曲線如圖6所示。
觀察圖5和圖6可以發現,隨著地面無人車編隊的運動,無人車之間相距越來越遠,保持整個網絡連通的通信代價逐漸變大。在初始時間,由于三種方法都是從相同起點附近出發,本文算法對應的通信性能優勢不明顯,然而隨著時間的推移,本文算法的路徑對應的通信性能越來越優,例如當第960 s時,本文算法對應的全局信息連接代價為J=7.732 4,而同時刻盤旋中繼策略和隨機運動中繼策略對應的全局信息連接代價分別為J=10.499 7和J=12.606 3。相比無人機盤旋中繼策略,本文算法的通信性能提高了35.78%;相比無人機隨機運動中繼策略,本文算法的通信性能提高了63.03%。
另外,從圖6中可看到,隨機運動中繼和盤旋中繼對應的全局信息連接代價曲線在時間大于600 s后會產生波動起伏,這是因為隨機運動中繼和盤旋中繼都沒有根據地面無人車節點的運動自適應調整中繼無人機的運動,而本文提出的算法由于綜合考慮多種影響因素,所以性能穩定。
上述實驗2中的對比結果表明,本文提出的基于改進PSO-NMPC算法的中繼無人機運動控制方法能夠有效支持運動地面無人車編隊的通信。下面接著討論本文方法在復雜動態環境下控制中繼無人機支持地面無人車編隊通信的實際效果,驗證環境對信道及中繼通信的影響,并重點關注隨著編隊內車輛進入不同類型的城市環境區域,整個空地中繼網絡的通信拓撲的實時變化。
4.4 復雜環境下通信拓撲的實時變化
實驗3在實驗2的基礎上,為了突顯本文所提中繼無人機運動控制方法在復雜多變的城市環境下也能夠有效支持地面無人車編隊的通信,對城市區域劃分了4種類型,分別為城市郊區、城區、高密度城區、高樓區,其對應的信道參數[25-26]如第4.1節中表1所示,覆蓋范圍如第4.1節中表2所示,其他實驗參數同實驗2。
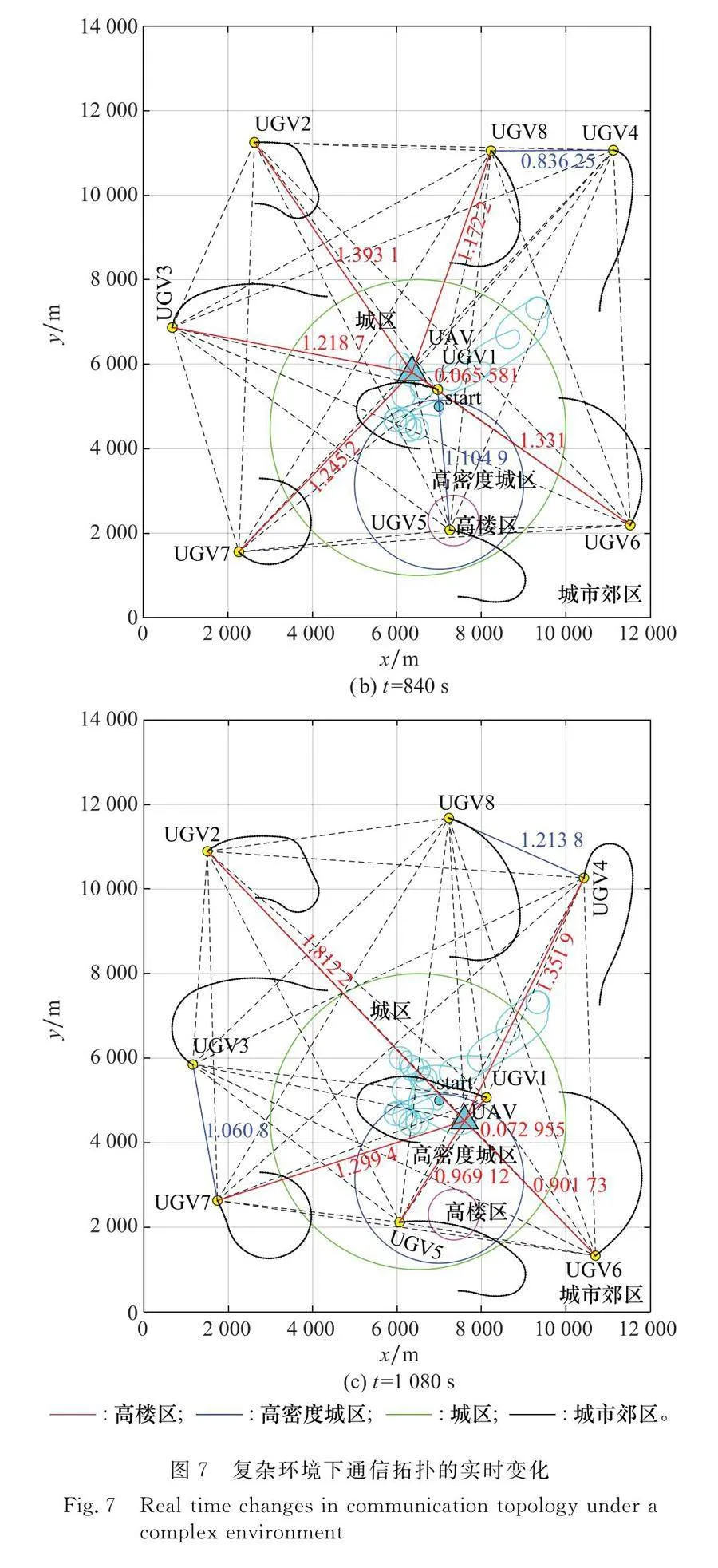
選取了實驗過程中3個時間節點的仿真結果圖,如圖7(a)~圖7(c)所示。圖7中,不同顏色的圓圈表示不同類型環境的覆蓋范圍,其中紫色圓圈內的區域類型為高樓區,藍色圓圈內的區域類型為高密度城區,綠色圓圈內的區域類型為城區,剩余環境的區域類型為城市郊區。
觀察圖7(a)~圖7(c)可知,隨著地面無人車編隊的運動,在各個時刻地面無人車(UGV1~UGV8)將進入不同的城市環境區域。圖7(a)中,地面無人車UGV5還未進入通信條件最差的高樓區,注意到此時地面無人車UGV5與中繼無人機有直接的通信鏈路。然而在圖7(b)中,地面無人車UGV5已經運動到高樓區域。根據表1中所示的經驗信道參數與式(9)、式(13)中的空地信道模型,該區域內通信環境由于高密度和高海拔的建筑使得信道中LoS概率較小,進而導致此區域內用戶通信環境較為惡劣,如果其直接與中繼無人機建立通信鏈路,通信質量將非常差。而圖7(b)中,中繼無人機確實斷開了與地面無人車UGV5的直接通信鏈路,取而代之的是通過地面無人車UGV1與地面無人車UGV5進行通信。在圖7(c)中,地面無人車UGV5已經離開高樓區域,中繼無人機又恢復了與地面無人車UGV5的直接通信鏈路。
這與上述理論分析相匹配,驗證了本文提出的中繼無人機運動控制方法在復雜城市環境下的可行性,即空地中繼網絡能夠根據環境信道的變化動態調整網絡的通信拓撲,并控制無人機飛行到使整個網絡保持連通的同時通信性能最優的中繼位置,同時驗證了設計中繼無人機運動控制方法時考慮環境對信道特性的影響是有意義的,而這些在實際的通信中繼任務中是十分重要的。
4.5 不同信道模型下中繼通信性能的比較
由于大多數以前使用無人機作為通信中繼的研究,都使用了僅考慮通信距離的無線通信模型或者其他過于簡化的信道模型,導致通信性能下降。為了體現信道模型對中繼通信控制結果的影響并突出本文采用的現實信道模型可以獲得更好的中繼通信性能,本次實驗4在實驗3的基礎上,對基于本文信道模型的中繼無人機運動控制、基于距離信道模型的中繼無人機運動中繼以及無中繼這3種情形分別進行仿真實驗,全局信息連接代價隨時間變化的對比曲線如圖8所示。
觀察圖7以及圖8中的3條曲線可知,隨著地面無人車編隊的運動,地面無人車越來越分散,相互之間的通信變得越來越難,無中繼情形下的通信代價始終處于三者中最高的位置,基于距離信道模型的中繼對比無中繼情形,整個網絡的全局信息連接代價已經有了明顯的降低,而基于本文信道模型的空地中繼通信,全局信息連接的代價始終處于一個最低的位置,中繼通信的控制效果最好。
從圖8中還可以看到,基于距離模型的中繼情境下,全局信息連接代價曲線隨時間會產生波動,這是因為當地面無人車進入不同環境類型的城市區域時,基于距離模型的中繼只根據距離將無人機驅使到最佳位置,而這個中繼位置由于忽略了環境類型對信道的影響,可能與某些地面無人車節點的通信鏈路質量很差,導致整個網絡的通信性能產生了跳躍。相反,基于本文模型的中繼,由于考慮的環境對信道的影響,所以性能穩定。
5 結 論
(1) 針對提高空地中繼網絡通信連通性和通信性能,提出一種改進PSO和NMPC相結合的中繼無人機優化控制方法。數值仿真結果表明,所提出的運動控制方法可以驅使無人機到達或跟蹤最優中繼位置的運動,顯著改善靜態和動態環境下網絡的通信質量和連接性。
(2) 基于圖論中最小生成樹概念構建了全局信息連接的代價,可以方便準確地評估中繼網絡的通信性能。另外,該網絡連接性不僅考慮了無人機與地面節點之間的通信鏈路,還考慮了地面節點與地面節點之間的通信鏈路,更具實際應用價值。
(3) 復雜動態環境下的對比仿真實驗結果表明,考慮環境對信道特性的影響是有益的,可以在復雜城市環境下獲得更好的網絡性能。
參考文獻
[1] ALJEHANI M, INOUE M. Communication and autonomous control of multi-UAV system in disaster response tasks[C]∥Proc.of the 11th KES International Conference on Agent and Multi-Agent Systems: Technology and Applications, 2017: 123-132.
[2] XU G B, SHI Y J, SUN X Y, et al. Internet of things in marine environment monitoring: a review[J]. Sensors, 2019, 19(7): 69-89.
[3] PARK J H, CHOI S C, AHN I Y, et al. Multiple UAVs-based surveillance and reconnaissance system utilizing IoT platform[C]∥Proc.of the IEEE International Conference on Electronics, Information, and Communication, 2019.
[4] HU J Y, NIU H L, CARRASCO J, et al. Fault-tolerant coope-rative navigation of networked UAV swarms for forest fire mo-nitoring[J]. Aerospace Science and Technology, 2022, 123(6): 265-276.
[5] FU X W, BI H Y, GAO X G. Multi-UAVs cooperative localization algorithms with communication constraints[J]. Mathematical Problems in Engineering, 2017, 9(3): 1943539.
[6] LI B, ZHAO S J, MIAO R Q, et al. A survey on unmanned aerial vehicle relaying networks[J]. IET Communications, 2021, 15(10): 1262-1272.
[7] MOZAFFARI M, SAAD W, BENNIS M, et al. Mobile unmanned aerial vehicles (UAVs) for energy-efficient internet of things communications[J]. IEEE Trans.on Wireless Communications, 2017, 16(11): 7574-7589.
[8] WON J, KIM D Y, PARK Y I, et al. A survey on UAV placement and trajectory optimization in communication networks: from the perspective of air-to-ground channel models[J]. ICT Express, 2022, 9(3): 385-397.
[9] ONO F, OCHIAI H, MIURA R. A wireless relay network based on unmanned aircraft system with rate optimization[J]. IEEE Trans.on Wireless Communications, 2016, 15(11): 7699-7708.
[10] MOZAFFARI M, SAAD W, BENNIS M, et al. Mobile unmanned aerial vehicles (UAVs) for energy-efficient internet of things communications[J]. IEEE Trans.on Wireless Communications, 2017, 16(11): 7574-7589.
[11] KRIJESTORAC E, HANNA S, CABRIC D. Uav access point placement for connectivity to a user with unknown location using deep rl[C]∥Proc.of the IEEE Globecom Workshops, 2019.
[12] ZENG Y, ZHANG R, LIM T J. Throughput maximization for UAV-enabled mobile relaying systems[J]. IEEE Trans.on Communications, 2016, 64(12): 4983-4996.
[13] CHAMSEDDINE A, AKHRIF O, CHARLAND-ARCAND G, et al. Communication relay for multiground units with unmanned aerial vehicle using only signal strength and angle of arrival[J]. IEEE Trans.on Control Systems Technology, 2017, 25(1): 286-293.
[14] WU G, GAO X, FU X W, et al. Mobility control of unmanned aerial vehicle as communication relay in airborne multi-user systems[J]. Chinese Journal of Aeronautics, 2019, 32(6): 1520-1529.
[15] KIM S, OH H, SUK J, et al. Coordinated trajectory planning for efficient communication relay using multiple UAVs[J]. Control Engineering Practice, 2014, 29(8): 42-49.
[16] LUN Y B, YAO P, WANG Y X. Trajectory optimization of SUAV for marine vessels communication relay mission[J]. IEEE Systems Journal, 2020, 14(4): 5014-5024.
[17] BOR-YALINIZ R I, EL-KEYI A, YANIKOMEROGLU H. Efficient 3-D placement of an aerial base station in next generation cellular networks[C]∥Proc.of the IEEE International Conference on Communications, 2016.
[18] LADOSZ P, OH H, ZHENG G, et al. A hybrid approach of learning and model-based channel prediction for communication relay UAVs in dynamic urban environments[J]. IEEE Robotics and Automation Letters, 2019, 4(3): 2370-2377.
[19] WU G F, GAO X G, WAN K F. Mobility control of unmanned aerial vehicle as communication relay to optimize ground-to-air uplinks[J]. Sensors, 2020, 20(8): 172-194.
[20] POP P C. The generalized minimum spanning tree problem: an overview of formulations, solution procedures and latest advances[J]. European Journal of Operational Research, 2020, 283(1): 1-15.
[21] 吳高峰, 高曉光, 符小衛. 一種基于多無人機的中繼節點布置問題建模與優化方法[J]. 航空學報, 2017, 38(11): 241-253.
WU G F, GAO X G, FU X W. A modeling and optimization method for relay node arrangement problem based on multiple UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(11): 236-248.
[22] LADOSZ P, OH H, CHEN W H. Optimal positioning of communication relay unmanned aerial vehicles in urban environments[C]∥Proc.of the IEEE International Conference on Unmanned Aircraft Systems, 2016: 1140-1147.
[23] WU J F, WANG H L, LI N, et al. Distributed trajectory optimization for multiple solar-powered UAVs target tracking in urban environment by adaptive grasshopper optimization algorithm[J]. Aerospace Science and Technology, 2017, 70(3): 497-510.
[24] WAN Y, NAMUDURI K, ZHOU Y, et al. A smooth-turn mobility model for airborne networks[J]. IEEE Trans.on Vehicular Technology, 2013, 62(7): 3359-3370.
[25] AL-HOURANI A, KANDEEPAN S, JAMALIPOUR A. Modeling air-to-ground path loss for low altitude platforms in urban environments[C]∥Proc.of the IEEE Global Communications Conference, 2014: 2898-2904.
[26] AL-HOURANI A, KANDEEPAN S, LARDNER S. Optimal LAP altitude for maximum coverage[J]. IEEE Wireless Communications Letters, 2014, 3(6): 569-572.
[27] CHENG X, HUANG Z W, CHEN S Z. Vehicular communication channel measurement, modelling, and application for beyond 5G and 6G[J]. IET Communications, 2020, 14(19): 3303-3311.
[28] BITHAS P S, NIKOLAIDIS V, KANATAS A G, et al. UAV-to-ground communications: channel modeling and UAV selection[J]. IEEE Trans.on Communications, 2020, 68(8): 5135-5144.
[29] MUSLIMOV T Z, MUNASYPOV R A. Multi-UAV cooperative target tracking via consensus-based guidance vector fields and fuzzy MRAC[J]. Aircraft Engineering and Aerospace Technology, 2021, 93(7): 1204-1212.
[30] GUANG Z, BI X Z, ZHAO H Y, et al. Non-cooperative maneuvering spacecraft tracking via a variable structure estimator[J]. Aerospace Science and Technology, 2018, 79(4): 352-363.
[31] 宋敏, 戴靜, 孔韜. 基于NMPC的無人機自主防撞控制方法[J]. 系統工程與電子技術, 2019, 41(9): 2092-2099.
SONG M, DAI J, KONG T. Autonomous collision avoidance control method for UAV based on NMPC[J]. Systems Engineering and Electronics, 2019, 41(9): 2092-2099.
作者簡介
陶燦燦(1992—),男,博士研究生,主要研究方向為空地協同任務規劃、中繼通信、空地協同控制。
周 銳(1968—),男,教授,博士,主要研究方向為無人機自主控制、任務規劃與管理、多飛行器協同控制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
光學精密工程(2016年6期)2016-11-07 09:07:19