基于CL-RRT與MPC的艦載機牽引系統路徑規劃
2024-11-22 00:00:00孫家瑋余明暉楊大鵬湯皓泉卞大鵬
系統工程與電子技術 2024年5期



摘 要:
針對艦載機在甲板狹小、復雜環境下的調運過程,結合閉環快速隨機搜索樹(close loop rapidly exploring random trees, CL-RRT)和模型預測控制(model predictive control, MPC)提出一種艦載機牽引系統的路徑規劃算法。首先,在CL-RRT中采用純追蹤器與線性二次型(linear quadratic, LQ)控制器得到系統的控制輸入并向前仿真得到規劃路徑。其次,將已得路徑進行等比縮放與插值作為MPC的初始解。最后,設置MPC的目標函數等并解得最終路徑。展開自定義三個場景下的仿真實驗,通過與CL-RRT算法的實驗結果進行比較,驗證本文算法的優越性。實驗結果表明,所提算法可有效解決因采樣隨機性帶來解質量不佳的問題,提升艦載機在甲板上的調運效率與安全性。
關鍵詞:
艦載機牽引系統; 閉環快速隨機搜索樹; 模型預測控制; 路徑規劃
中圖分類號:
V 37
文獻標志碼: A""" DOI:10.12305/j.issn.1001-506X.2024.05.27
Path planning of carrier aircraft traction system based on CL-RRT and MPC
SUN Jiawei1, YU Minghui1,*, YANG Dapeng2, TANG Haoquan2, BIAN Dapeng3
(1. School of Artificial Intelligence and Automation, Huazhong University of Science and Technology,
Wuhan 430074, China; 2. China Ship Development and Design Center, Wuhan 430064, China;
3. The Second Military Representative Office of Naval Equipment Department in Wuhan, Wuhan 430064, China)
Abstract:
The transport process of carrier aircraft is difficult because the environment of deck is narrow and complex. A path planning algorithm for the carrier aircraft traction system is proposed combining close loop rapidly exploring random trees (CL-RRT) and model predictive control (MPC). Firstly, the pure pursuit controller and linear quadratic (LQ) controller are used in CL-RRT to obtain the control input of the system, and the planned path is obtained by forward simulation. Secondly, the obtained path is scaled and interpolated as the initial solution of MPC. Finally, the objective function and so on of MPC is set and the final path is solved. The simulation experiment of three customized scenarios is carried out to verify the superiority of the proposed algorithm by comparing with the experimental results of CL-RRT algorithm. Experimental results show that the proposed algorithm can effectively solve the problem of poor solution quality caused by randomness of sampling, and improve the efficiency and safety of carrier aircraft on deck.
Keywords:
carrier aircraft traction system; close loop rapidly exploring random trees (CL-RRT); model predictive control (MPC); path planning
0 引 言
航空母艦是近現代國防力量的重要保障,航母甲板上的艦載機作為海上主要的作戰設備,其數量與出動回收的效率對于海面安全保障以及作戰效率都有著巨大的影響。狹小的甲板空間、密集的保障資源和艦島等障礙物成為了影響艦載機調運效率的主要約束。因此,為艦載機在擁擠的甲板空間上規劃一條安全高效的調運路徑對航母戰斗力的提升具有重大意義[1]。依靠飛行甲板上的空勤指揮會使得調運效率降低,實現艦載機調運的自動化與智能化等問題已成為當前研究的熱點之一[2-4]。
目前,艦載機在飛行甲板上的路徑規劃更多地被看作機器人平面內運動的避碰問題。傳統機器人的移動避碰路徑規劃算法包括人工勢場法、啟發式算法、節點搜索法、圖搜索算法及最優控制法等。張智等[5]構建艦載機模型并得出目標間距離計算以及碰撞檢測方法,基于人工勢場法建立艦載機牽引系統的路徑規劃避碰模型。Wu等[6]通過建立艦載機與牽引車的運動模型,提出一種動態多步優化算法,配合蟻群算法進行路徑規劃。薛均曉等[7]針對高度異構、動態的航母甲板作業場景中的艦載機避障問題,提出一種結合預測算法和深度強化學習的避障方法。劉鈺[8]應用了逆向強化學習方法解決艦載機甲板路徑規劃,建立示教系統進行大量演示數據的采集。宮雪[9]建立艦載機牽引系統的模型,使用多種快速隨機搜索樹(rapidly exploring random trees, RRT)變體與混合A*算法對艦載機進行路徑規劃并進行比較。劉亞杰等[10]基于Dijkstra和凸殼算法實現了艦載機的靜態路徑規劃。張競等[11]通過建立路徑規劃的數學模型,基于幾何學理論和Dijkstra算法設計最優路徑的搜索算法。劉潔等[12]建立了艦載機調運的運動模型,并將軌跡規劃問題轉化為時間-能量最優化問題,提出保辛偽譜(symplectic pseudospectral method, SPM)法,并應用于軌跡規劃問題中。韓維等[13]針對甲板復雜布列環境建立凸殼障礙膨脹模型,結合啟發式與最優控制方法,進行艦載機甲板路徑規劃研究。
近來,在自動駕駛與移動機器人方向,眾多路徑規劃算法被提出,其中以A*[14]算法與Dijkstra[15]算法為代表的圖搜索算法,通過將環境單元分解計算所需起始位置與目標位置間的最短路徑。但此算法無法保證艦載機牽引系統所需的目標位姿。
以人工勢場法為代表的函數算法[16],通過設置勢場函數,使目標位置吸引計算對象,障礙物排斥計算對象從而生成規劃路徑。未考慮艦載機牽引系統的運動約束并且會因障礙物和目標合力相同使得系統陷入局部震蕩。
以強化學習為代表的智能算法,通過對象系統與環境的不斷交互與獎懲獲得收益,并通過大量訓練計算最大收益的動作集,從而得到最終的規劃路徑[7]。此類算法難以找到適合的獎懲機制,并需要進行大量訓練,計算量較大。
目前較為熱門的節點采樣算法[17-18],通過在系統的狀態空間中采樣獲得其可用位姿,并通過碰撞檢測以及回溯求得最終路徑。但傳統的采樣算法僅對空間中的狀態進行采樣,而節點之間并無約束關系,這會導致最終規劃的路徑不符合系統的運動約束,使得路徑精確度大大降低,艦載機牽引系統難以按照給出的路徑行進;除此之外,由于采樣的隨機性可能導致最終的規劃路徑解質量較差以及路線不平滑等問題。
上述路徑規劃算法可使所求路徑全局避碰,但如圖搜索算法與節點所搜法[12-13]等無法保證模型的運動學和位姿約束,像強化學習、人工勢場及隨機采樣等算法[12-13,16-18]無法保證所得路徑解的質量,可能導致劣質解。
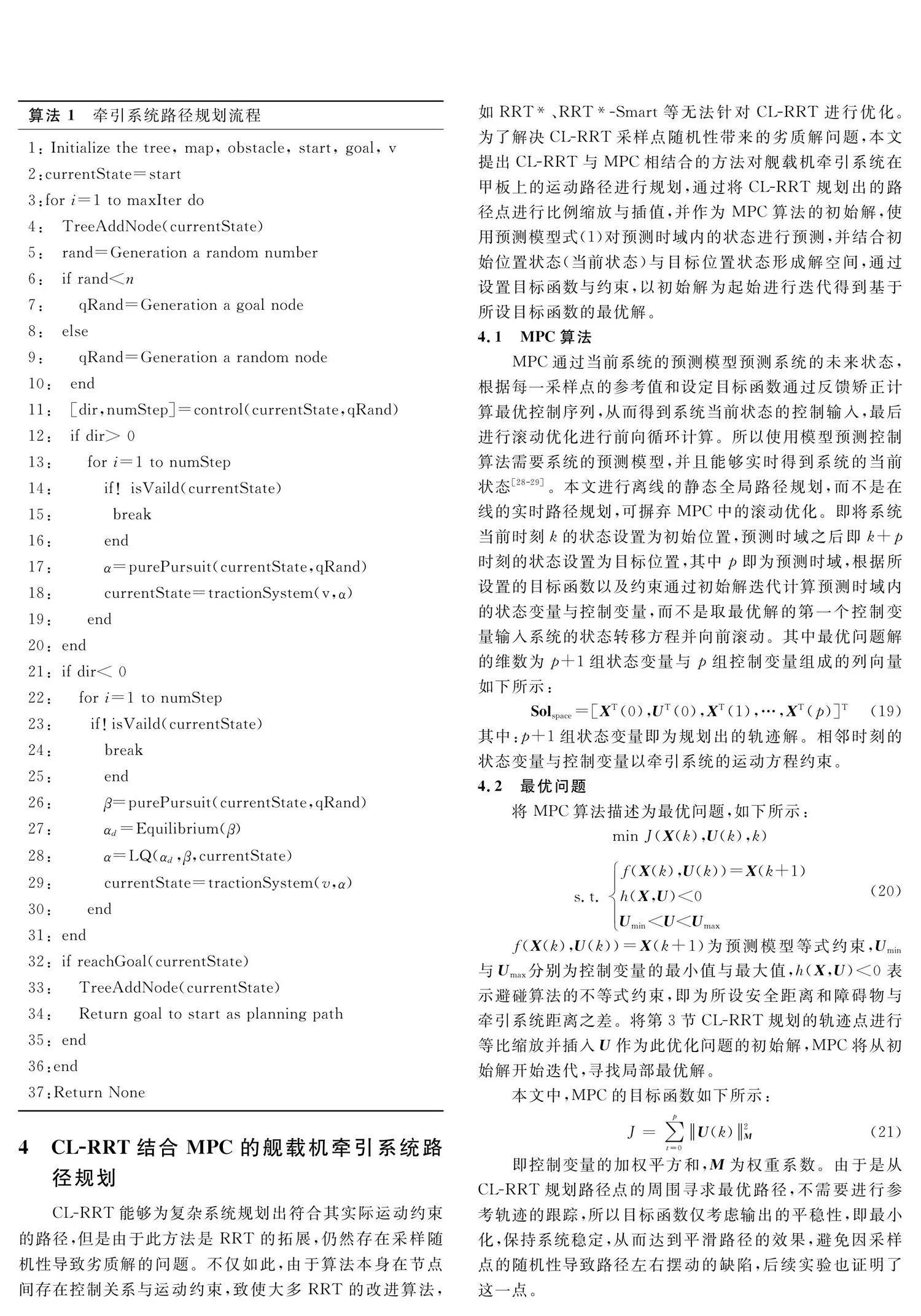
為規劃出符合艦載機牽引系統運動約束的路徑并有效處理因采樣隨機性導致最終路徑解質量不佳的問題,本文提出一種閉環RRT(close loop RRT, CL-RRT)結合模型預測控制(model predictive control, MPC)的艦載機牽引系統路徑規劃算法。首先根據CL-RRT框架,使用純追蹤器與線性二次型(linear quadratic, LQ)控制器結合的方法控制牽引系統的穩定性及牽引車與艦載機之間的平衡關系,從而保證牽引系統移動時的運動約束,再通過隨機采樣、避碰檢測以及向前仿真得到避碰路徑;其次將所得路徑進行等比縮放計算出預測時域的長度以及相應的狀態變量,并進行插值作為后續MPC算法的初始解;最后設置MPC的目標函數、等式與不等式約束形成最優問題,通過從所設初始解處根據目標函數在約束范圍內迭代求最優解的方式解決因CL-RRT算法隨機采樣導致解質量不佳的問題,從而得到滿足艦載機牽引系統運動學約束的最優路徑。
本文結構安排為:第1節對航母甲板上艦載機的工作內容以及存在問題作大致描述;第2節對艦載機牽引系統進行建模;第3節使用CL-RRT算法為牽引系統規劃路徑;第4節使用MPC算法對CL-RRT算法的規劃結果進行優化;第5節在3個場景下進行仿真實驗并分析仿真結果;第6節歸納總結文章內容。
1 問題表述
航母甲板一般劃分為多個功能區如著艦區、停機區及起飛區等。艦載機在回收后分別在不同的區域執行相應的保障任務,并準備下一波次的出動。艦載機在發動機關機后的運動一般由牽引車拖運完成,如艦載機在飛行甲板與機庫之間的調運以及站位轉移等。因此,在有限的甲板空間上為艦載機牽引系統規劃一條符合系統運動約束并且高效安全的路徑,對提高航母的作戰能力具有重大意義。
2 艦載機牽引系統建模
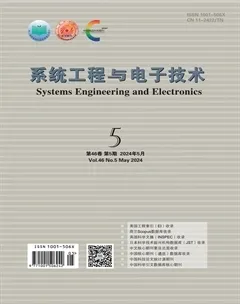
本文的研究對象為折翼艦載機在航母甲板上的路徑規劃。艦載機的外輪廓一般采用其特征圓表示,如圖1(a)所示,這會增大艦載機的碰撞范圍導致規劃路徑的掃掠面積增大。本文將艦載機的外輪廓簡化為凸多邊形,如圖1(b)所示,這樣可減小艦載機的平面面積使得甲板空間的利用率更高。
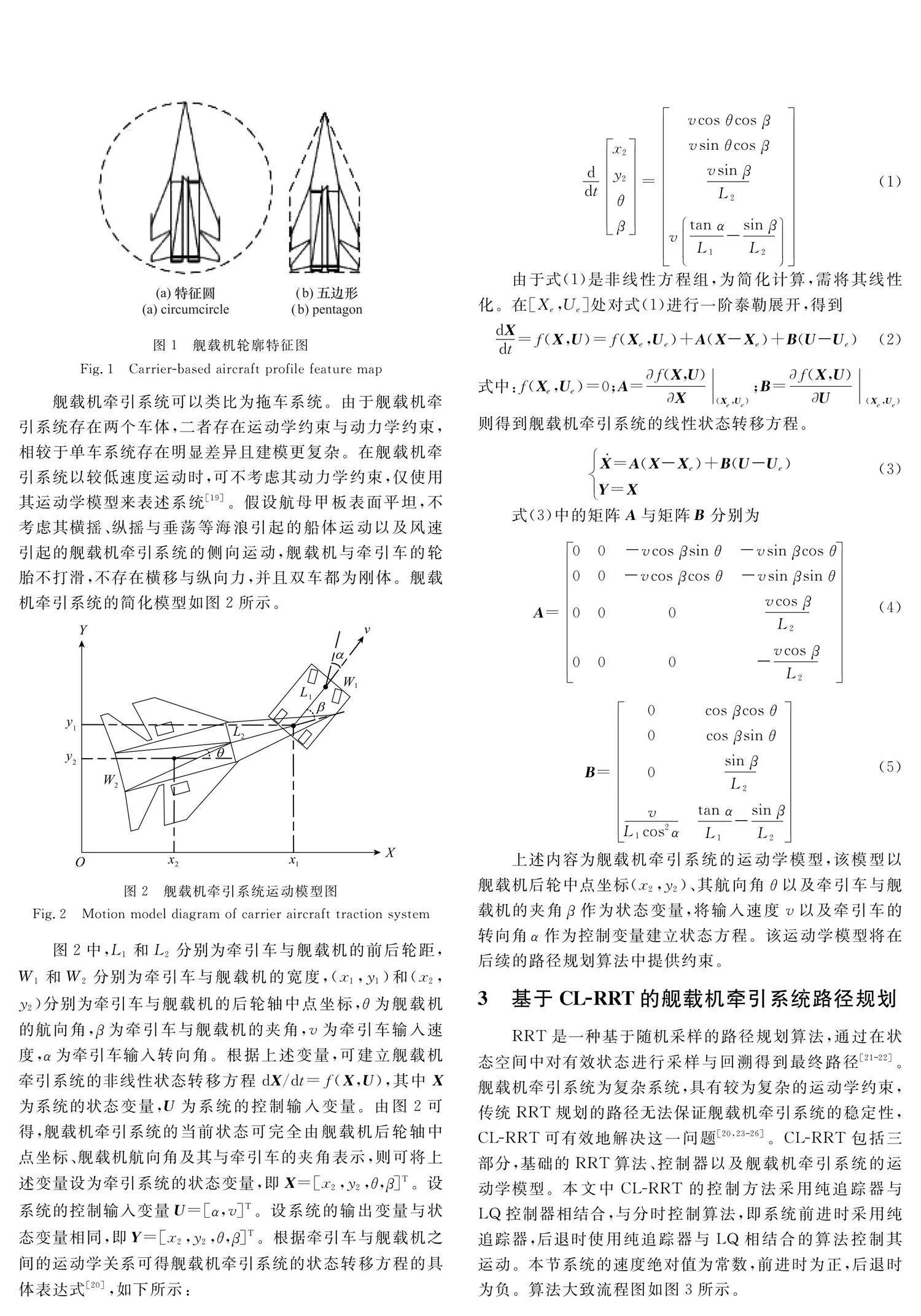
艦載機牽引系統可以類比為拖車系統。由于艦載機牽引系統存在兩個車體,二者存在運動學約束與動力學約束,相較于單車系統存在明顯差異且建模更復雜。在艦載機牽引系統以較低速度運動時,可不考慮其動力學約束,僅使用其運動學模型來表述系統[19]。假設航母甲板表面平坦,不考慮其橫搖、縱搖與垂蕩等海浪引起的船體運動以及風速引起的艦載機牽引系統的側向運動,艦載機與牽引車的輪胎不打滑,不存在橫移與縱向力,并且雙車都為剛體。艦載機牽引系統的簡化模型如圖2所示。
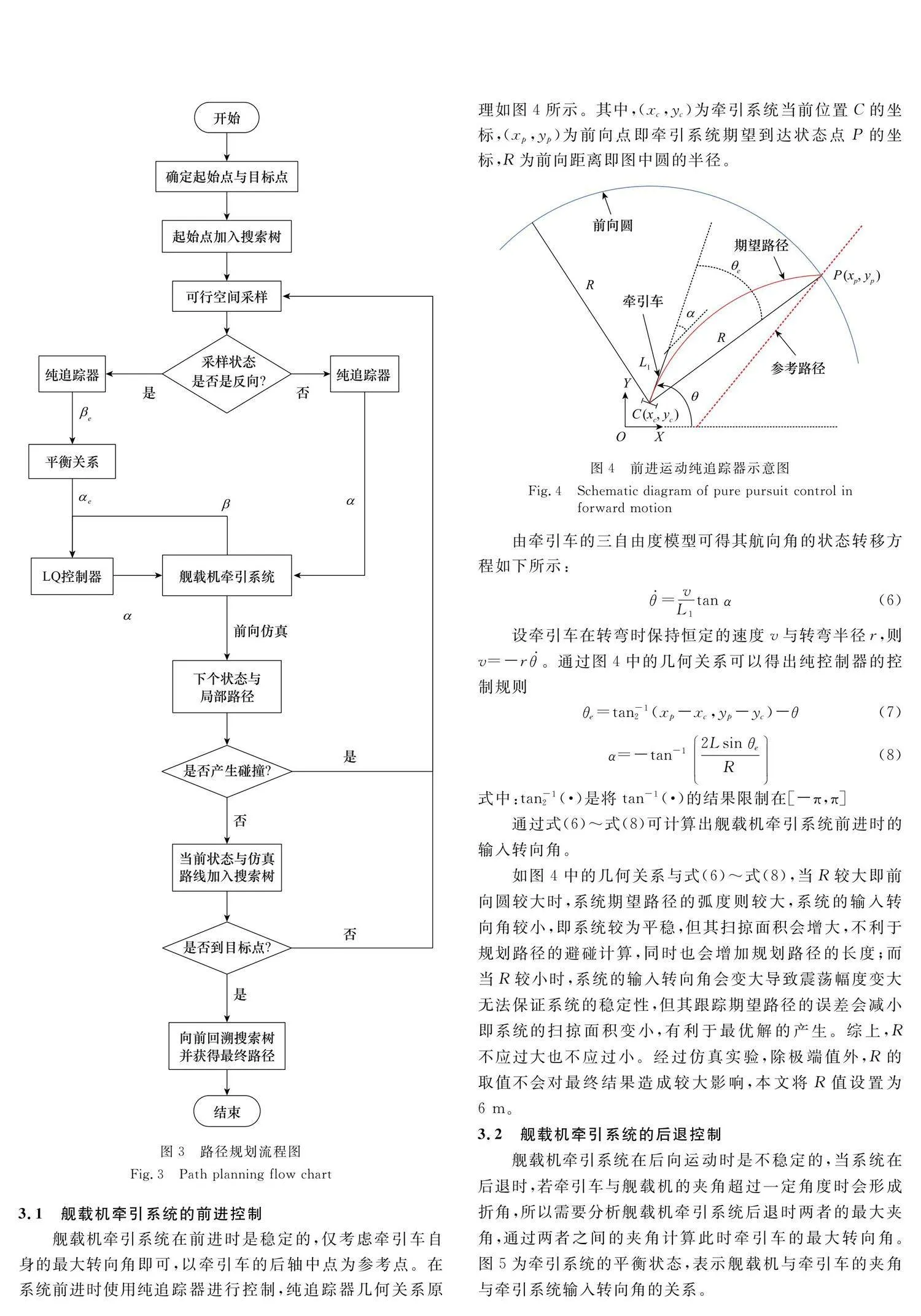
圖2中,L1和L2分別為牽引車與艦載機的前后輪距,W1和W2分別為牽引車與艦載機的寬度,(x1,y1)和(x2,y2)分別為牽引車與艦載機的后輪軸中點坐標,θ為艦載機的航向角,β為牽引車與艦載機的夾角,v為牽引車輸入速度,α為牽引車輸入轉向角。根據上述變量,可建立艦載機牽引系統的非線性狀態轉移方程dX/dt=f(X,U),其中X為系統的狀態變量,U為系統的控制輸入變量。由圖2可得,艦載機牽引系統的當前狀態可完全由艦載機后輪軸中點坐標、艦載機航向角及其與牽引車的夾角表示,則可將上述變量設為牽引系統的狀態變量,即X=[x2,y2,θ,β]T。設系統的控制輸入變量U=[α,v]T。設系統的輸出變量與狀態變量相同,即Y=[x2,y2,θ,β]T。根據牽引車與艦載機之間的運動學關系可得艦載機牽引系統的狀態轉移方程的具體表達式[20],如下所示:
5 仿真結果及分析
本節對上述算法進行仿真實驗,通過3個場景實現。分別使用RRT*算法、CL-RRT算法以及CL-RRT結合MPC算法對艦載機牽引系統進行路徑規劃并將規劃結果對比分析,以艦載機路徑的長度、掃掠面積與運動過程中牽引車輸入轉向角的變化過程作為評價指標來判斷算法的優劣。
本次仿真采用第2節分析的折翼艦載機模型。仿真實驗為航母甲板上的單架艦載機由牽引車從初始位置無碰撞地牽引至目標位置,并保證艦載機符合相應位姿,航母甲板上停靠的艦載機為牽引系統需要避免碰撞的障礙物。設牽引車前后輪距L1=5 m、寬W1=5 m,艦載機前后輪距L2=10 m、寬W2=10 m。根據第3節和第4節的分析,CL-RRT算法中,設速度vc=1.5 m/s,經仿真測試,設R=6 m,權重值Q=10;MPC算法中,系統轉向角范圍-αlim≤α≤αlim、系統夾角范圍-π/2≤β≤π/2,牽引車速度范圍-1.5 m/s≤v≤1.5 m/s,經仿真測試,設比例系數a=0.18、權重矩陣M=10
01。
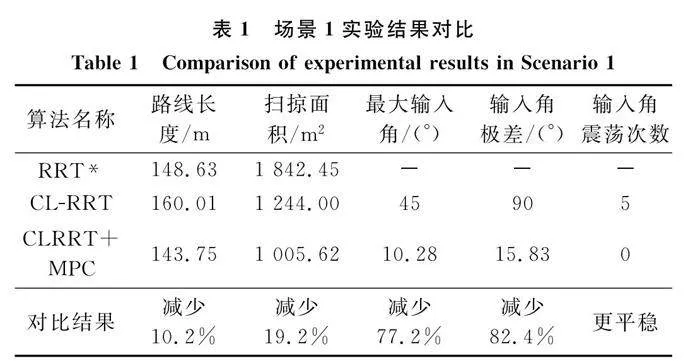
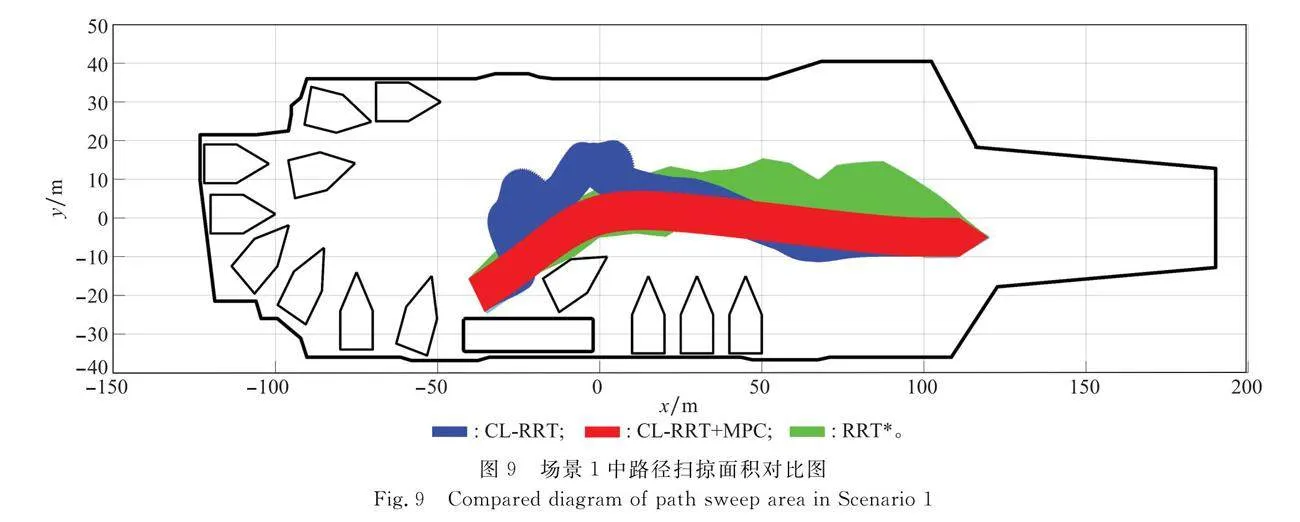
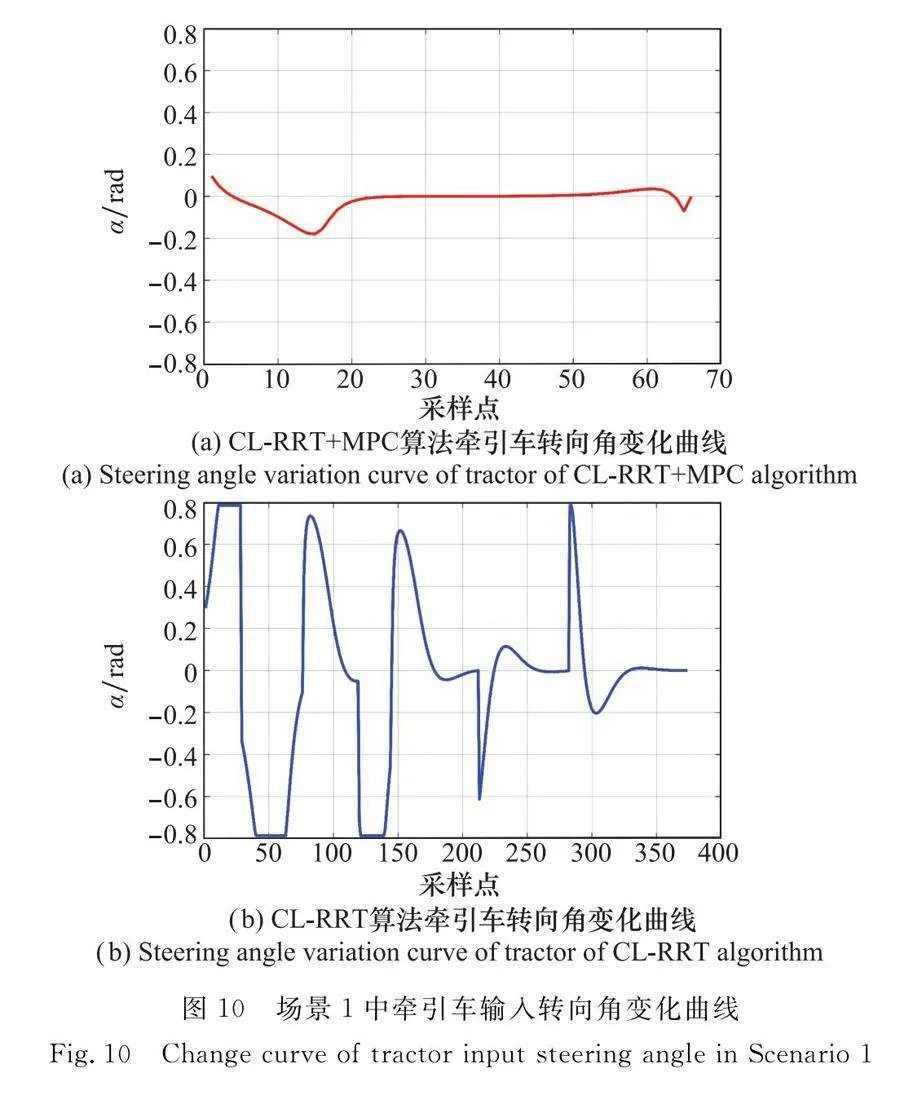
場景1下的仿真實驗結果如圖8~圖10以及表1所示,牽引系統初始狀態變量為[-38,20,π/6,0]T,目標狀態變量為[100,-5,0,0]T。觀察圖8~圖9,不難發現,使用RRT*算法的路徑不平滑,存在的折線較多,并且其掃掠面積圖不符合艦載機牽引系統的運動約束。而使用CL-RRT算法與結合算法均能規劃出符合系統運動學約束的避碰軌跡路線。但是通過對比,僅使用CL-RRT算法得到的軌跡因采樣點的隨機性會使得路線的長度以及艦載機所占甲板面積增大,即牽引系統會行駛一些無效路線,產生左右搖擺的情況,這不利于系統保持穩定,增加安全隱患,同時也降低了甲板的空間利用率和艦載機的調運效率。而由本文提出算法規劃出的路徑則更加平穩,幾乎沒有涉及甲板上多余的區域,提高了艦載機牽引系統的安全性和平穩性同時也使得路線更加高效。圖10所示為牽引車前輪輸入轉向角的變化曲線,通過對比可得,在僅用CL-RRT算法規劃的路徑中,牽引車輸入轉向角的震蕩幅度較大,震蕩次數明顯較多。而在使用本文提出算法規劃的路徑中,牽引車的輸入轉向角則更加平穩,僅在轉彎處發生輸入轉向角的變化,并且變化的幅度較小,即系統的穩定性更高。觀察表1中的實驗對比結果,相較于CL-RRT規劃算法,CL-RRT結合MPC算法的路徑長度與掃掠面積分別減少了10.2%與19.2%,輸入平穩性方面,牽引車的輸入轉向角最大值與極差分別減少77.2%與82.4%,這表示使用結合算法規劃的路徑在效率和安全性方面都明顯優于僅用CL-RRT算法規劃的路徑。
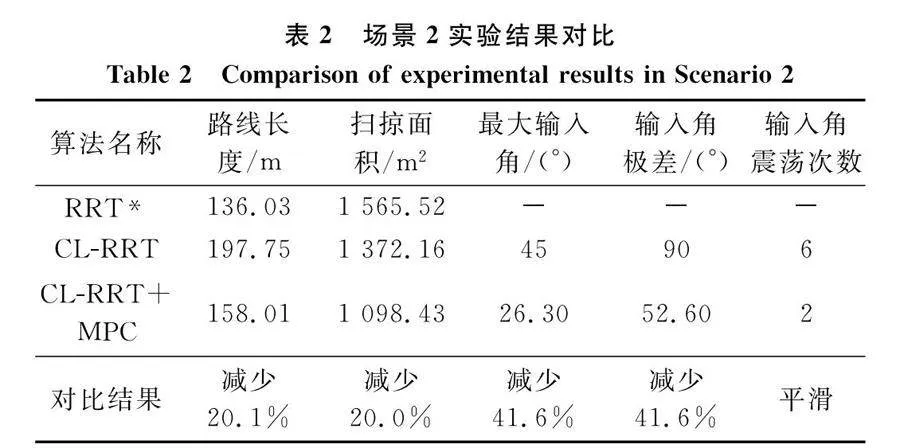
場景2下的仿真實驗結果如圖11與表2所示,牽引系統的初始狀態變量為[-60,-20,π/3,0]T,目標狀態變量為[60,-34,π/2,0]T,如圖11中淺藍色的艦載機外輪廓所示,障礙物主要為兩者之間停靠的5架艦載機。通過對圖11中的規劃路線觀察,不難發現,RRT*算法規劃出的路徑依然不符合系統的運動約束。而紅色的軌跡曲線在路線長度與路線掃掠面積方面均優于藍色的軌跡曲線,即紅色曲線實現了對甲板空間更高效地利用。結合表2中的仿真實驗結果對比,在路徑效率方面,結合算法規劃路徑的長度與掃掠面積分別減少了20.1%與20%,在穩定性方面,系統的最大輸入角與輸入角極差均減少了41.6%,輸入角的震蕩次數也明顯減少。
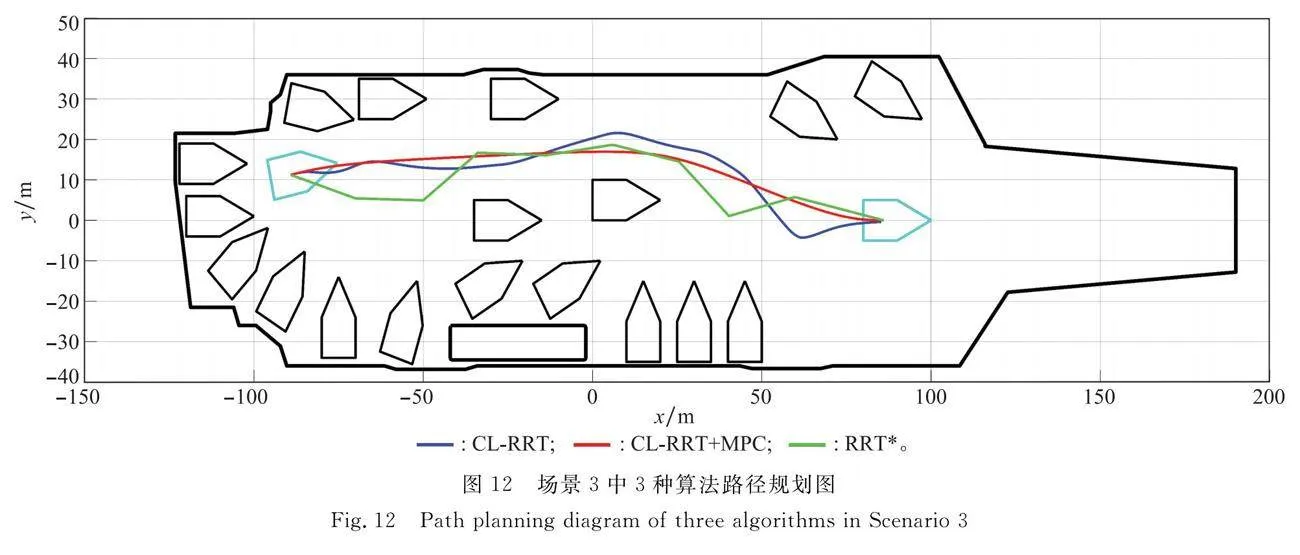
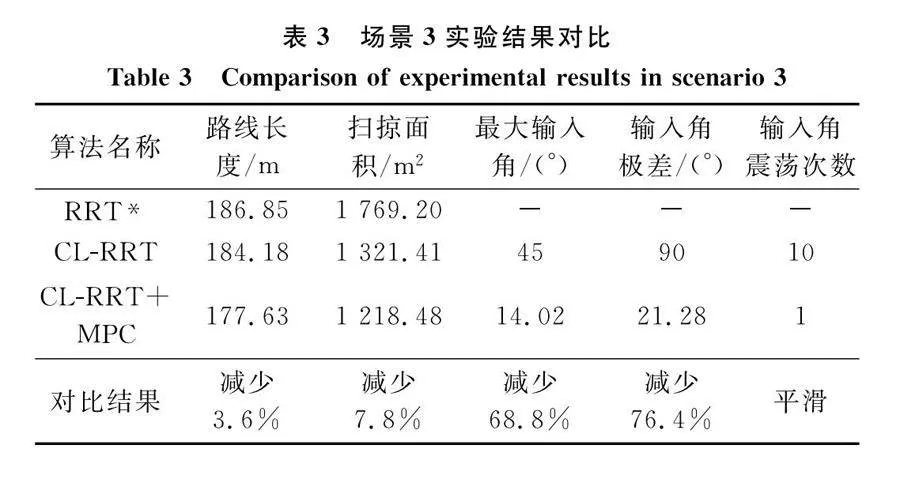
場景3的仿真結果如圖12與表3所示,系統的初始狀態變量為[-95,10,π/15,0]T,目標狀態變量為[80,0,0,0]T,飛行甲板上停靠的艦載機相較于前兩個場景數量更多,布列情況更復雜。與之前場景的結果相似,除RRT*外的兩種算法規劃的路線都能實現無碰撞地從初始位置運動至目標位置,但CL-RRT規劃的路徑更占用甲板空間,路線更長,并且有左右搖擺現象,不利于保持系統的穩定。結合表3的對比數據,使用本文提出算法規劃的路線長度更短,掃路面積更小,即艦載機在甲板占用面積更小,路線效率更高,不僅如此,系統運動過程中的最大輸入角減小68.8%,輸入角極差減小76.4%,輸入角的震蕩次數也由原來的10次優化為1次,系統的輸入平穩性明顯改善,路徑也更平滑。
6 結 論
本文使用CL-RRT結合MPC算法對艦載機牽引系統進行路徑規劃。由于牽引系統為復雜系統,本身具有復雜的約束關系,傳統規劃算法規劃出的路徑難以符合系統本身的運動約束。CL-RRT算法在基礎RRT上拓展,在搜索樹的節點向前伸展時增加控制器,使得節點之間存在符合系統運動約束的控制關系。但由于本身隨機采樣的局限性,所得軌跡存在解劣質的缺陷。通過將CL-RRT規劃的路徑軌跡作為MPC算法的初始解,并通過設置目標函數與模型約束,求解預測時域內的狀態變量與控制變量,得到初始解附近的局部最優解,從而得到優化后的路徑軌跡,實現平滑路徑的效果。通過設計的仿真實驗,驗證了本文提出的算法具有以下優點:① 可規劃出符合艦載機牽引系統運動約束的路徑;② 有效地解決采樣算法采樣的隨機性帶來的路線冗余問題;③ 使得艦載機牽引系統的運動軌跡更加平滑,運動過程更平穩。
本文算法處理的是單艦載機的路徑規劃,對于多艦載機的全局路徑規劃,即飛行甲板上的動態規劃,還需要更深層次的研究。
參考文獻
[1] WANG X W, LIU J, SU X C, et al. A review on carrier aircraft dispatch path planning and control on deck[J]. Chinese Journal of Aeronautics, 2020, 33(12): 3039-3057.
[2] MICHINI B,HOW J P. A human-interactive course of action planner for aircraft carrier deck operations[C]∥Proc.of the AIAA Information Technology, 2011: 1515-1525.
[3] ZHANG Z, LIN S L, DONG R, et al. Designing a human-computer cooperation decision planning system for aircraft carrier deck scheduling[C]∥Proc.of the AIAA Information Technology,2015.
[4] WU Y, SUN L G, QU X J. A sequencing model for a team of aircraft landing on the carrier[J]. Aerospace Science and Technology, 2016, 54(1): 72-87.
[5] 張智, 林圣琳, 邱兵, 等. 艦載機牽引系統甲板調運避碰路徑規劃[J]. 系統工程與電子技術, 2014, 36(8): 1551-1557.
ZHANG Z, LIN S L, QIU B, et al. Collision avoidance path planning of carrier aircraft traction system in dispatching on deck[J]. Systems Engineering and Electronics, 2014, 36(8): 1551-1557.
[6] WU Y, QU X J. Obstacle avoidance and path planning for carrier aircraft launching[J]. Chinese Journal of Aeronautics, 2015, 28(3): 695-703.
[7] 薛均曉, 孔祥燕, 郭毅博, 等. 基于深度強化學習的艦載機動態避障方法[J]. 計算機輔助設計與圖形學學報, 2021, 33(7): 1102-1112.
XUE J X, KONG X Y, GUO Y B, et al. Dynamic obstacle avoidance method for carrier aircraft based on deep reinforcement learning[J]. Journal of Computer-Aided Design amp; Computer Graphics, 2021, 33(7): 1102-1112.
[8] 劉玨. 基于逆強化學習的艦載機牽引車路徑規劃研究[D]. 哈爾濱: 哈爾濱工程大學, 2017.
LIU Y. Research on path planning of carrier aircraft tractor based on inverse reinforcement learning[D]. Harbin: Harbin Engineering University, 2017.
[9] 宮雪. 艦載機牽引系統的路徑規劃與軌跡跟蹤研究[D]. 武漢: 華中科技大學, 2021.
GONG X. Research on path planning and trajectory tracking of tractor-carrier aircraft system[D]. Wuhan: Huazhong University of Science and Technology, 2021.
[10] 劉亞杰, 李忠猛, 陳曉山. 考慮空間約束的機庫艦載機調運路徑規劃方法[J]. 海軍工程大學學報, 2014, 3(26): 100-103.
LIU Y J, LI Z M, CHEN X S. Path planning for transferring shipborne aircraft restricted to hangar space[J]. Journal of Naval University of Engineering, 2014, 3(26): 100-103.
[11] 張競, 吳宇, 屈香菊. 艦載機牽引系統路徑規劃方法[J]. 北京航空航天大學學報, 2018, 44(10): 2125-2133.
ZHANG J, WU Y, QU X J. Path planning method for traction system on carrier aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(10): 2125-2133.
[12] 劉潔, 董獻洲, 韓維, 等. 采用牛頓迭代保辛偽譜算法的艦載機甲板路徑規劃[J]. 浙江大學學報(工學版), 2020, 54(9): 1827-1838.
LIU J, DONG X Z, HAN W, et al. Trajectory planning for carrier aircraft on deck using Newton symplectic pseudo-spectral method[J]. Journal of Zhejiang University (Engineering Science), 2020, 54(9): 1827-1838.
[13] 韓維, 劉子玄, 蘇析超, 等. 結合啟發式與最優控制的艦載機甲板路徑規劃算法[J]. 系統工程與電子技術, 2023, 45(4): 1098-1110.
HAN W, LIU Z X, SUN X C, et al. Deck path planning of carrier-based aircraft based on heuristic and optimal control[J]. Systems Engineering and Electronics, 2023, 45(4): 1098-1110.
[14] DIJKSTRA E W. A note on two problems in connexion with graphs[J]. Numerische Mathematik, 1959, 1(1): 269-271.
[15] HART P, NILSSON N, RAPHAEL B. A formal basis for the heuristic determination of minimum cost paths[J].IEEE Trans.on Systems Science Cybernetics, 1968, 4(2): 100-107.
[16] HUPTYCH M, ROCK S. Online path planning in dynamic environments using the curve shortening flow method[J]. Production Engineering, 2015, 9(5/6): 613-621.
[17] WU Z P, MENG Z J, ZHAO W L, et al. Fast-RRT: a RRT-based optimal path finding method[J]. Applied Sciences-Basel, 2021, 11(24): 11777-11794.
[18] GAN Y, ZHANG B, KE C, et al. Research on robot motion planning based on RRT algorithm with nonholonomic constraints[J]. Neural Processing Letters, 2021, 53(4): 3011-3029.
[19] KARKEE M, STEWARD B L. Study of the open and closed loop characteristics of a tractor and a single axle towed implement system[J]. Journal of Terramechanics, 2010, 47(6): 379-393.
[20] LJUNGQVIST O. Motion planning and stabilization for a reversing truck and trailer system[D]. Sweden: Linkoping University, 2015.
[21] LAVALL S M, KUFFNER J J. Randomized kinodynamic planning[J]. International Journal of Robotics amp; Research, 2001, 5(15): 378-400.
[22] TAHIROVIC A, MAGNANI G. A roughness-based RRT for mobile robot navigation planning[J]. IFAC Proceedings Vo-lumes, 2011, 1(44): 5944-5949.
[23] LEONARD J, HOW J, TELLER S, et al. A perception-driven autonomous urban vehicle[J]. Journal of Field Robotics, 2008, 25(10): 727-774.
[24] KUWATA Y, TEO J, FIORE G, et al. Real-time motion planning with applications to autonomous urban driving[J]. IEEE Trans.on Control Systems Technology, 2009, 17(5): 1105-1118.
[25] MANAV A C. LAZOGLU I. A novel cascade path planning algorithm for autonomous truck-trailer parking[J]. IEEE Trans.on Intelligent Transportation Systems, 2023, 23(7): 6821-6835.
[26] TAHERI E, FERDOWSI M H, DANESH M. Closed-loop randomized kinodynamic path planning for an autonomous underwater vehicle[J]. Applied Ocean Research, 2019, 83(7): 48-64.
[27] LJUNG L, GLAD T. Control theory-multivariable and nonli-near methods[M]. London: Taylor and Francis, 2000.
[28] KIM J C, PAE D S, LIM M T. Obstacle avoidance path planning algorithm based on model predictive control[C]∥Proc.of the IEEE 18th International Conference on Control, Automation and Systems, 2018: 141-143.
[29] LIU Z Y, ZHU D Q, YAN M Z. An AUV path planning algorithm based on model predictive control and obstacle restraint[C]∥Proc.of the 14th International Conference on Intelligent Robotics and Applications, 2021, 13016: 617-627.
[30] DIMITRI P B. Reinforcement learning and optimal control[M]. Beijing: Tsinghua University Press, 2020.
作者簡介
孫家瑋(1998—),男,碩士研究生,主要研究方向為艦載機的調度。
余明暉(1971—),男,副教授,博士,主要研究方向為決策支持系統、系統優化。
楊大鵬(1981—),男,高級工程師,碩士,主要研究方向為艦載機的出動回收能力建模、仿真與評估。
湯皓泉(1989—),男,高級工程師,本科,主要研究方向為艦船航空保障。
卞大鵬(1976—),男,工程師,碩士,主要研究方向為艦船航空保障。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
公民與法治(2020年11期)2020-07-25 02:02:06
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
領導決策信息(2018年50期)2018-02-22 06:17:16
家庭影院技術(2017年9期)2017-09-26 03:41:45
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16