無人機集群曲線虛擬管道空間滿足規劃
2024-11-22 00:00:00肖士博齊國元鄧嘉豪蘇鵬鵬賈晶童
系統工程與電子技術 2024年10期
摘 要:虛擬管道寬度直接影響了管道內無人機的流速,但目前虛擬管道規劃的方法并不能保證管道寬度,容易造成堵塞,嚴重影響無人機通行效率。對此,提出一種虛擬管道空間滿足規劃方法,可以在包含障礙物的環境中得到一條滿足虛擬管道空間要求的管道生成線。主要包括路徑搜索和軌跡優化,基于快速探索隨機樹*(rapidly exploring random tree RRT*)搜索,通過空間檢測判斷每段路徑周圍是否有足夠空間,若無足夠空間則重新拓展搜索,替換掉空間不足的路徑段。在軌跡優化過程中,使用均勻B樣條參數化軌跡,并設計碰撞代價函數和光滑代價函數,使軌跡遠離障礙物,為虛擬管道規劃提供足夠空間。仿真測試驗證了所提方法在大規模集群中的優越性和魯棒性。在仿真測試中,15架無人機集群通行時間平均降低20%。
關鍵詞: 虛擬管道; 四旋翼飛行器; 運動規劃; 路徑搜索; 均勻B樣條; 空間滿足
中圖分類號: TP 29 文獻標志碼: A""" DOI:10.12305/j.issn.1001-506X.2024.10.29
Space satisfaction planning for curved virtual tube of unmanned
aerial vehicle swarm
XIAO Shibo QI Guoyuan DENG Jiahao SU Pengpeng JIA Jingtong2
(1. School of Control Science and Engineering, Tiangong University, Tianjin 300387, China;
2. School of Electronics and Information Engineering, Tiangong University, Tianjin 300387, China)
Abstract: The width of the virtual tube directly affects the flow rate of unmanned aerial vehicles in the tube. However, current virtual tube planning methods cannot guarantee the tube width, which leads to blockages that severely impact the efficiency of unmanned aerial vehicle passage. In this regard, a method for planning a virtual tube space is proposed that can generate a tube generation path meeting the virtual tube space requirements in an environment containing obstacles. The method mainly includes path searching and trajectory optimization. It is based on the rapidly exploring random tree* (RRT*) search, where space detection is used to determine whether there is sufficient space around each segment of the path. The search is then re-expanded, replacing path segments with insufficient space if the space is not enough. In the trajectory optimization process, a uniform B-spline is used to parameterize the trajectory, and a collision cost function and a smoothing cost function are designed to keep the trajectory away from obstacles, providing enough space for virtual tube planning. Simulation tests verify the superiority and robustness of the proposed method in large-scale swarms, with the reduction of 20% of average passage time of a swarm containing 15 unmanned aerial vehicles.
Keywords: virtual tube; quadrotor aircraft; motion planning; path searching; uniform B-spline; space satisfaction
0 引 言
無人機技術的快速發展使無人機集群在各個方面得到了應用,如軍事行動、物流運輸、區域搜索等[14]。
無人機集群需要避免相互碰撞且躲避障礙物。基于控制的防碰撞方法根據全局路徑和當前局部信息直接引導智能體移動,計算量和通訊負擔較低,更適用于大型多智能體集群[57]。Quan等[8]提出虛擬管道,在無人機通過障礙物時構建一段虛擬管道以確保安全通行,并使用分布式控制使機器人在管道內通行且相互避免碰撞。Gao等[9]針對包含障礙物的復雜環境,提出面對集群的四邊形連接的虛擬管道,設置分布式控制的函數,可以引導集群在管道內朝著終點運動并相互不碰撞。Quan等[10]提出曲線虛擬管道,并在管道內設置勢場,引導機器人集群。相較于其他方法,虛擬管道計算量低,對于機器人集群尤其大規模集群有著顯著的優勢。Mao等[11]在虛擬管道工作基礎之上,設置正則約束條件,生成正則曲線虛擬管道,避免管道在轉向中的突刺,防止機器人在管道內死鎖,提高通行效率。
虛擬管道的集中式規劃需要一條管道生成線,也就是一條無碰撞的平滑軌跡。虛擬管道的規劃質量直接影響了最終的通行效率,然而虛擬管道的規劃不同于普通的移動機器人規劃。目前,管道生成線主要使用的是機器人運動規劃常用的方法。首先,使用A*算法[12]、快速探索隨機樹*(rapidly exploring random tree RRT*)算法[13]等經典路徑規劃算法搜索路徑,然后通過Minimum-Snap[14]生成多項式軌跡。這種方法所得到的軌跡主要針對的是單個機器人,并不考慮軌跡周圍空間,虛擬管道需要沿著生成線拓展一定空間,在障礙物密集或者包含狹窄空間的環境中容易導致管道過于狹窄。其次,現有方法所得軌跡通常離障礙物較近,如遇到復雜環境,受限于管道收縮率,所規劃的虛擬管道會有很長的狹窄段甚至全段狹窄,嚴重影響了通行效率甚至不可通行。降低A*算法的地圖分辨率或者增大障礙物碰撞體積可以獲得更大的路徑空間,但會丟失很多可通行的路徑,且會提高搜索失敗率。因此,設計一種針對虛擬管道的規劃算法是必要的。
根據路徑搜索、軌跡優化的整體設計思路。首先,設計一種不同于現有算法的路徑搜索算法,需要在搜索路徑時考慮路徑周圍空間大小。得到初始路徑后,還需要將路徑參數化為無碰撞且平滑的軌跡,基于多項式的Minimum-Snap生成軌跡是一種成熟的方法,而且可以通過閉式求解快速得到最優解[15]。同時,文獻[15]為解決軌跡經過狹窄空間或時間設置不合理出現“Overshoot”而導致碰撞的問題,在碰撞段迭代插入路徑點,使軌跡逐步趨近初始路徑以避免碰撞。添加約束條件也可以避免“Overshoot”的碰撞問題,常見的硬約束有安全飛行走廊[1617]。相比多項式而言,B樣條的凸包性質可以很好地避免碰撞[18]。在軌跡生成的優化問題中,只需優化控制點即可控制整條軌跡,這種方法在機器人運動規劃中得到了廣泛應用[1921]。設計合理的優化函數可以保證軌跡兩側有足夠的空間生成虛擬管道。
本文主要貢獻如下:
(1) 基于RRT*,提出一種專門面對虛擬管道的路徑搜索算法,可以考慮空間大小,避免路徑進入狹窄空間,保證了虛擬管道的寬度。
(2) 使用均勻B樣條參數化軌跡,并設計代價函數,使最終的管道生成線可以遠離障礙物且光滑。
經過仿真測試和對比,驗證所提方法的有效性和魯棒性。
1 虛擬管道
虛擬管道可以保證移動機器人集群既不與環境中障礙物碰撞,又不與集群內其他機器人碰撞,是機器人集群一種高效的方法[8]。虛擬管道采用集中式規劃,在包含障礙物的環境中規劃出一條無碰撞的軌跡,以該軌跡為管道生成線虛擬管道。集群內機器人設置分布式集群控制,通過管道內向量場以及控制器可以保證管道內機器人在管道內不發生相互碰撞且朝向管道終點線移動。虛擬管道相較于其他集群方法計算量低,尤其適合在大規模機器人集群中應用。目前,虛擬管道在機器人集群的很多方面得到了應用,如目標合圍[22]、交叉管道[23]和最優管道規劃[24]、無人機競速[25]等。
虛擬管道的集中式規劃通常需要一條無碰撞的光滑軌跡作為管道生成線,因此該軌跡的質量直接影響機器人集群的通行效率。目前,管道生成線的規劃方法包含兩部分,使用A*搜索出一條無碰撞路徑,之后使用Minimum-Snap將路徑優化為軌跡。該方法生成的軌跡主要針對單個機器人,軌跡周圍空間也是根據單個機器人體積生成,若要依據該軌跡生成虛擬管道,很有可能會出現周圍空間不足的現象,進而導致虛擬管道過窄甚至生成失敗。
2 虛擬管道路徑搜索
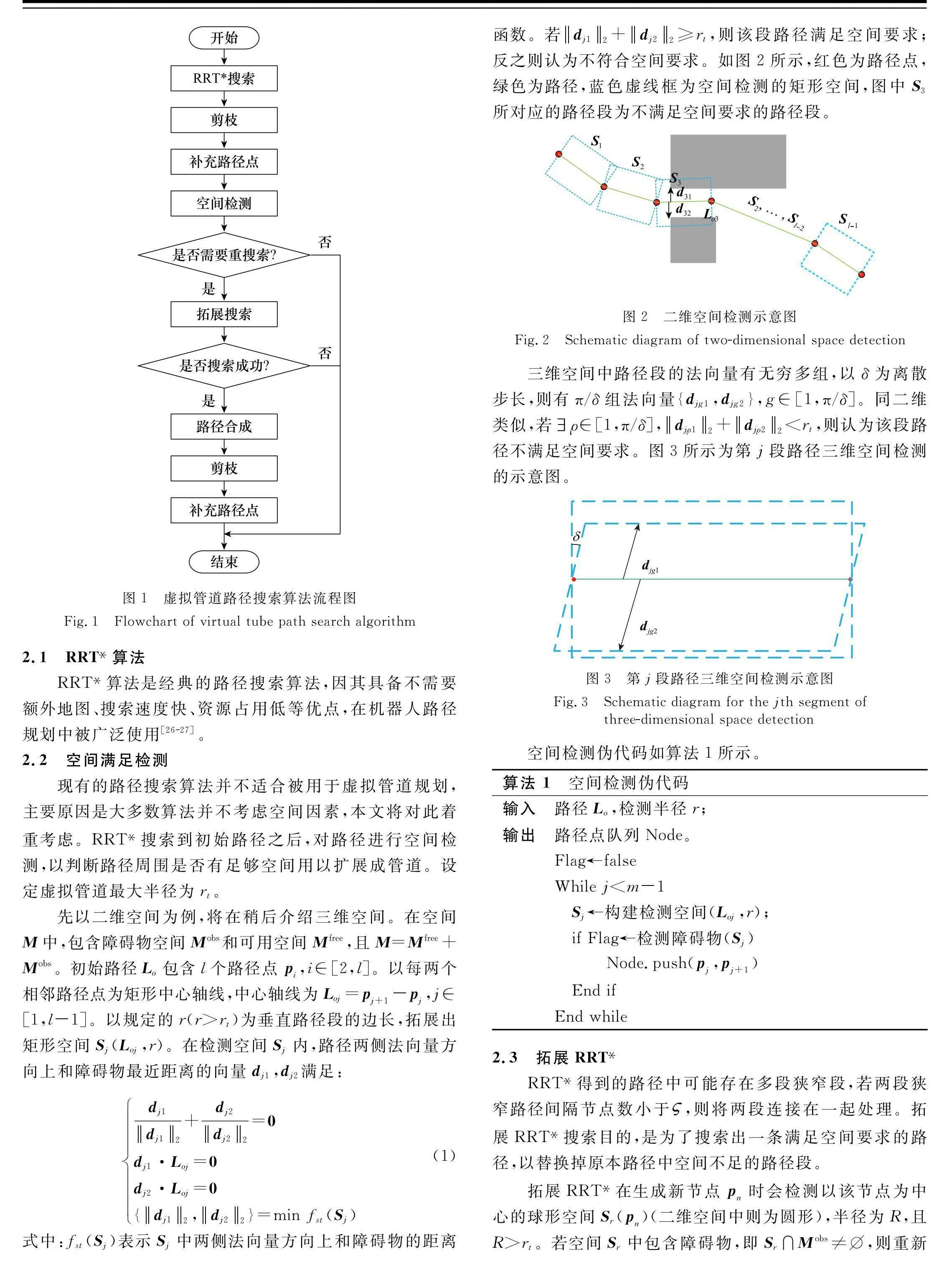
本文所提基于RRT*的路徑搜索算法整體流程圖如圖1所示。為方便說明,以二維空間路徑搜索為例。首先,使用RRT*搜索初始路徑,代價函數不做修改。為方便后續處理和保證路徑質量,對搜索到的路徑進行剪枝處理。根據拓展步長,在剪枝后的路徑中均勻插入路徑點,避免兩個相鄰路徑點間距過遠。然后,以每兩個相鄰路徑點拓展矩形檢測空間,對空間不足的路徑段,記錄其兩端路徑點。重啟RRT*搜索,以空間檢測兩端記錄的路徑點為起點和目標點。這次搜索時,在每個隨機點檢索該點周圍圓形空間,若圓形空間內包含障礙物,則認為是不滿足空間要求的隨機點,重新生成隨機點。最后,剔除第一次搜索的路徑中空間不足的路徑段,并連接重搜索的路徑,得到最終路徑。
2.1 RRT*算法
RRT*算法是經典的路徑搜索算法,因其具備不需要額外地圖、搜索速度快、資源占用低等優點,在機器人路徑規劃中被廣泛使用[2627]。
2.2 空間滿足檢測
現有的路徑搜索算法并不適合被用于虛擬管道規劃,主要原因是大多數算法并不考慮空間因素,本文將對此著重考慮。RRT*搜索到初始路徑之后,對路徑進行空間檢測,以判斷路徑周圍是否有足夠空間用以擴展成管道。設定虛擬管道最大半徑為rt。
先以二維空間為例,將在稍后介紹三維空間。在空間M中,包含障礙物空間Mobs和可用空間Mfree,且M=Mfree+Mobs。初始路徑Lo包含l個路徑點pi,i∈[2,l]。以每兩個相鄰路徑點為矩形中心軸線,中心軸線為Loj=pj+1-pj,j∈[1,l-1]。以規定的r(rgt;rt)為垂直路徑段的邊長,拓展出矩形空間Sj(Loj,r)。在檢測空間Sj內,路徑兩側法向量方向上和障礙物最近距離的向量dj1,dj2滿足:
dj1dj12+dj2dj22=0
dj1·Loj=0
dj2·Loj=0
{dj12,dj22}=min fst(Sj)(1)
式中:fst(Sj)表示Sj中兩側法向量方向上和障礙物的距離函數。若dj12+dj22≥rt,則該段路徑滿足空間要求;反之則認為不符合空間要求。如圖2所示,紅色為路徑點,綠色為路徑,藍色虛線框為空間檢測的矩形空間,圖中S3所對應的路徑段為不滿足空間要求的路徑段。
三維空間中路徑段的法向量有無窮多組,以δ為離散步長,則有π/δ組法向量{djg1,djg2},g∈[1,π/δ]。同二維類似,若ρ∈[1,π/δ],djρ12+djρ22lt;rt,則認為該段路徑不滿足空間要求。圖3所示為第j段路徑三維空間檢測的示意圖。
空間檢測偽代碼如算法1所示。
算法 1 空間檢測偽代碼
輸入 路徑Lo,檢測半徑r;
輸出 路徑點隊列Node。
Flag←1
While jlt;m-1
Sj←構建檢測空間(Loj,r);
if Flag←檢測障礙物(Sj)
Node.push(pj,pj+1)
End if
End while
2.3 拓展RRT*
RRT*得到的路徑中可能存在多段狹窄段,若兩段狹窄路徑間隔節點數小于,則將兩段連接在一起處理。拓展RRT*搜索目的,是為了搜索出一條滿足空間要求的路徑,以替換掉原本路徑中空間不足的路徑段。
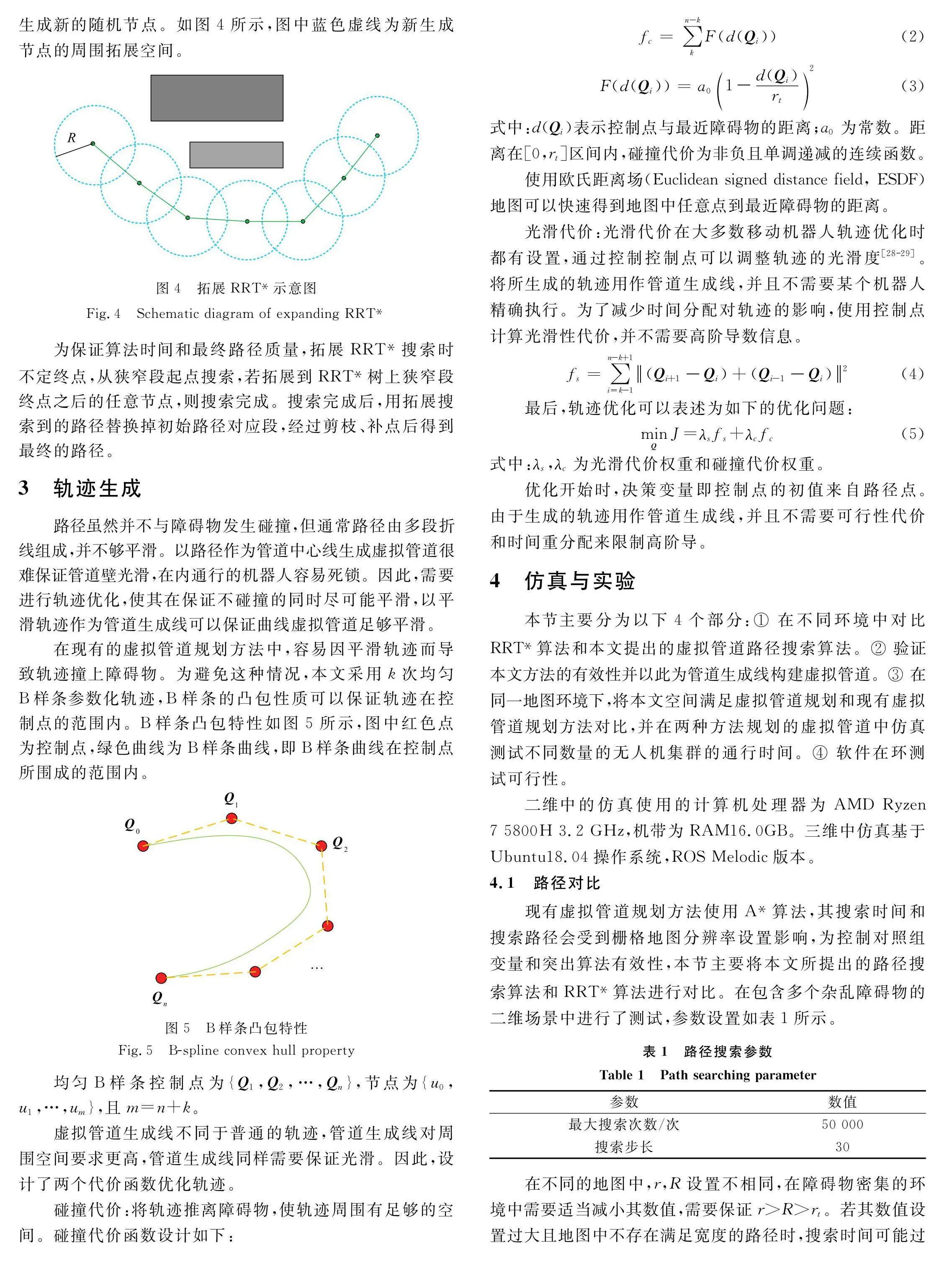
拓展RRT*在生成新節點pn時會檢測以該節點為中心的球形空間Sr(pn)(二維空間中則為圓形),半徑為R,且Rgt;rt。若空間Sr中包含障礙物,即Sr∩Mobs≠,則重新生成新的隨機節點。如圖4所示,圖中藍色虛線為新生成節點的周圍拓展空間。
為保證算法時間和最終路徑質量,拓展RRT*搜索時不定終點,從狹窄段起點搜索,若拓展到RRT*樹上狹窄段終點之后的任意節點,則搜索完成。搜索完成后,用拓展搜索到的路徑替換掉初始路徑對應段,經過剪枝、補點后得到最終的路徑。
3 軌跡生成
路徑雖然并不與障礙物發生碰撞,但通常路徑由多段折線組成,并不夠平滑。以路徑作為管道中心線生成虛擬管道很難保證管道壁光滑,在內通行的機器人容易死鎖。因此,需要進行軌跡優化,使其在保證不碰撞的同時盡可能平滑,以平滑軌跡作為管道生成線可以保證曲線虛擬管道足夠平滑。
在現有的虛擬管道規劃方法中,容易因平滑軌跡而導致軌跡撞上障礙物。為避免這種情況,本文采用k次均勻B樣條參數化軌跡,B樣條的凸包性質可以保證軌跡在控制點的范圍內。B樣條凸包特性如圖5所示,圖中紅色點為控制點,綠色曲線為B樣條曲線,即B樣條曲線在控制點所圍成的范圍內。
均勻B樣條控制點為{Q1,Q2,…,Qn},節點為{u0,u1,…,um},且m=n+k。
虛擬管道生成線不同于普通的軌跡,管道生成線對周圍空間要求更高,管道生成線同樣需要保證光滑。因此,設計了兩個代價函數優化軌跡。
碰撞代價:將軌跡推離障礙物,使軌跡周圍有足夠的空間。碰撞代價函數設計如下:
fc=∑n-kkF(d(Qi))(2)
F(d(Qi))=a01-d(Qi)rt2(3)
式中:d(Qi)表示控制點與最近障礙物的距離;a0為常數。距離在[0,rt]區間內,碰撞代價為非負且單調遞減的連續函數。
使用歐氏距離場(Euclidean signed distance field, ESDF)地圖可以快速得到地圖中任意點到最近障礙物的距離。
光滑代價:光滑代價在大多數移動機器人軌跡優化時都有設置,通過控制控制點可以調整軌跡的光滑度[2829]。將所生成的軌跡用作管道生成線,并且不需要某個機器人精確執行。為了減少時間分配對軌跡的影響,使用控制點計算光滑性代價,并不需要高階導數信息。
fs=∑n-k+1i=k-1(Qi+1-Qi)+(Qi-1-Qi)2(4)
最后,軌跡優化可以表述為如下的優化問題:
minQ J=λsfs+λcfc(5)
式中:λs,λc為光滑代價權重和碰撞代價權重。
優化開始時,決策變量即控制點的初值來自路徑點。由于生成的軌跡用作管道生成線,并且不需要可行性代價和時間重分配來限制高階導。
4 仿真與實驗
本節主要分為以下4個部分:① 在不同環境中對比RRT*算法和本文提出的虛擬管道路徑搜索算法。② 驗證本文方法的有效性并以此為管道生成線構建虛擬管道。③ 在同一地圖環境下,將本文空間滿足虛擬管道規劃和現有虛擬管道規劃方法對比,并在兩種方法規劃的虛擬管道中仿真測試不同數量的無人機集群的通行時間。④ 軟件在環測試可行性。
二維中的仿真使用的計算機處理器為AMD Ryzen 7 5800H 3.2 GHz,機帶為RAM16.0GB。三維中仿真基于Ubuntu18.04操作系統,ROS Melodic版本。
4.1 路徑對比
現有虛擬管道規劃方法使用A*算法,其搜索時間和搜索路徑會受到柵格地圖分辨率設置影響,為控制對照組變量和突出算法有效性,本節主要將本文所提出的路徑搜索算法和RRT*算法進行對比。在包含多個雜亂障礙物的二維場景中進行了測試,參數設置如表1所示。
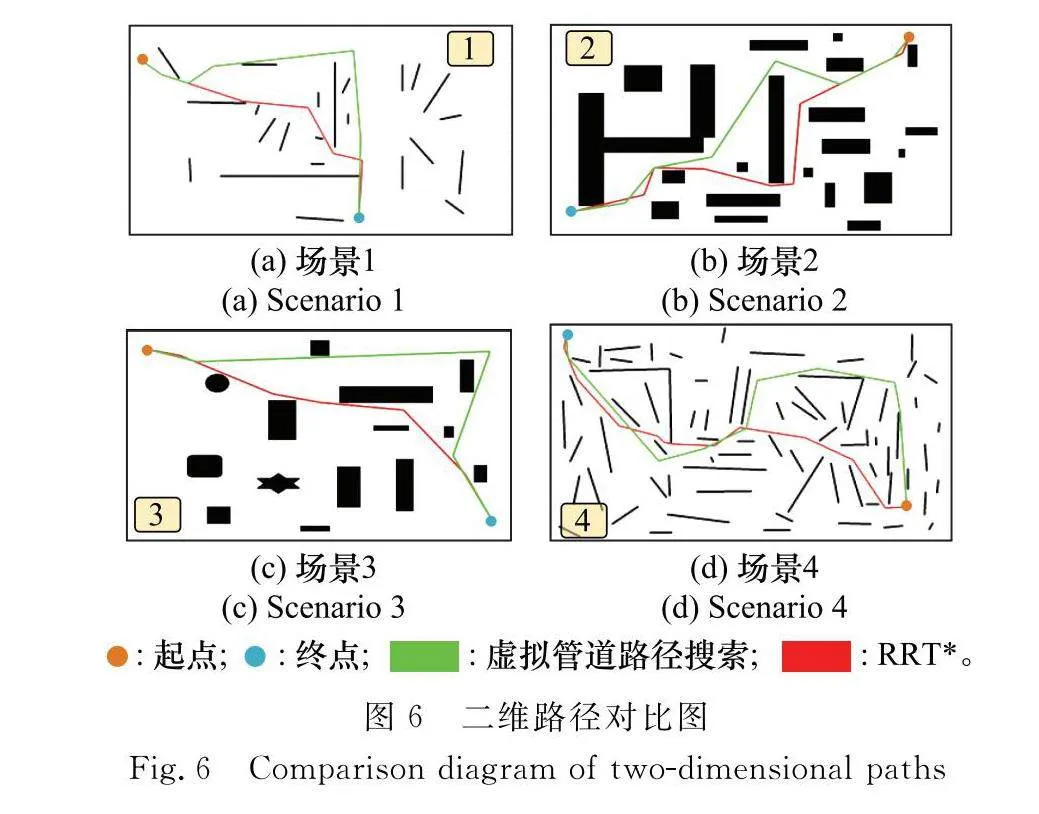
在不同的地圖中,r,R設置不相同,在障礙物密集的環境中需要適當減小其數值,需要保證rgt;Rgt;rt。若其數值設置過大且地圖中不存在滿足寬度的路徑時,搜索時間可能過長并失敗。在不同尺寸、障礙物形狀、障礙物數量、障礙物密度的地圖中的搜索結果如圖6所示,圖中黑色為障礙物。
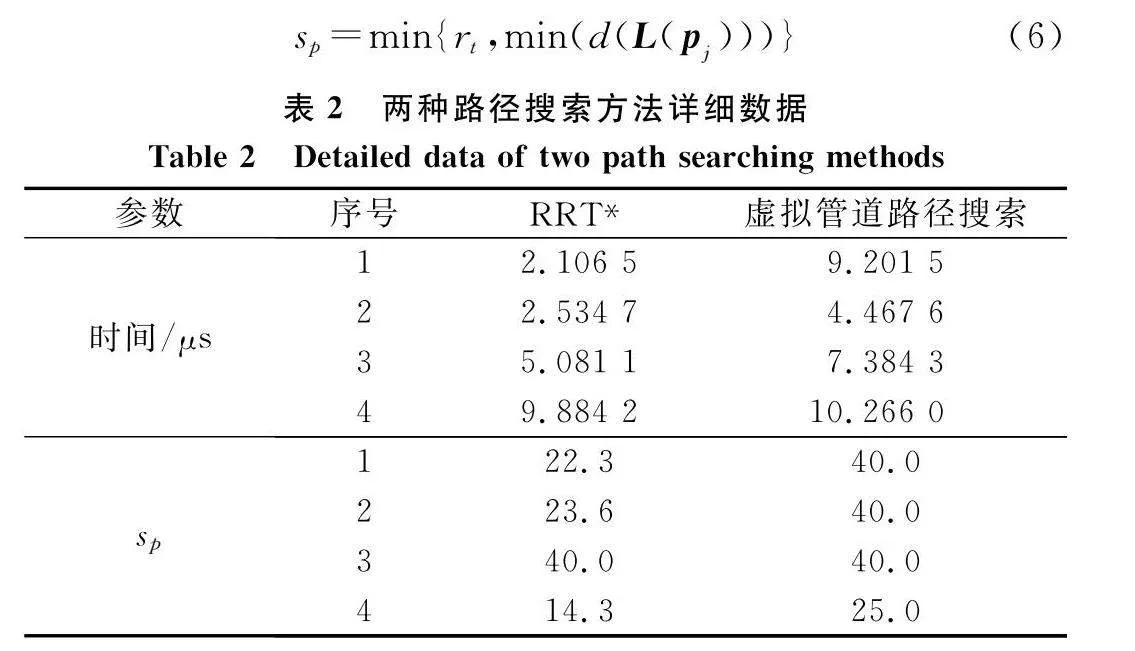
圖6可知,相比RRT*搜索出的路徑,本文所提出的虛擬管道路徑搜索的路徑周圍空間更大,避開了狹窄空間。表2為詳細數據,sp為路徑L上每個離散點p在路徑段兩側法向量方向上到障礙物的距離之和的最小值,即路徑在最狹窄處的空間大小。
sp=min{rt,min(d(L(pj)))}(6)
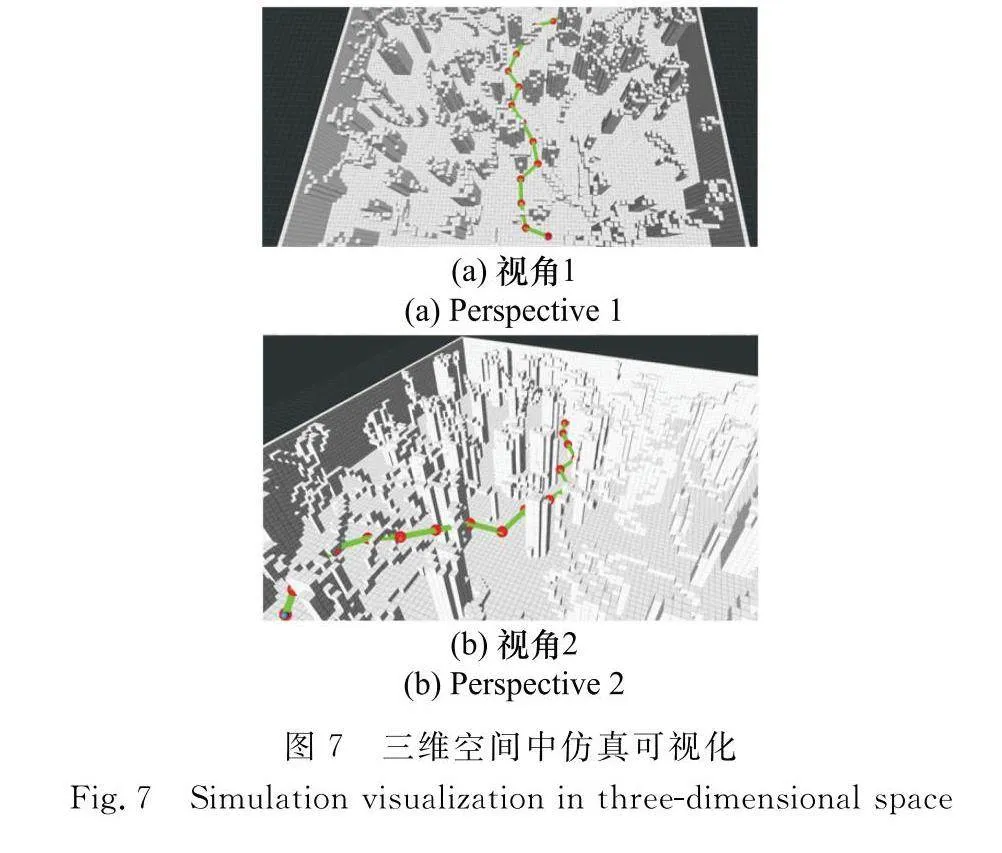
將所提出的虛擬管道路徑搜索在三維空間中驗證,程序采用C++11標準。如圖7所示,基于ROS中Rviz可視化界面,在包含密集障礙物的三維環境中,所提方法可以搜索到一條滿足空間要求的路徑。
4.2 軌跡與虛擬管道
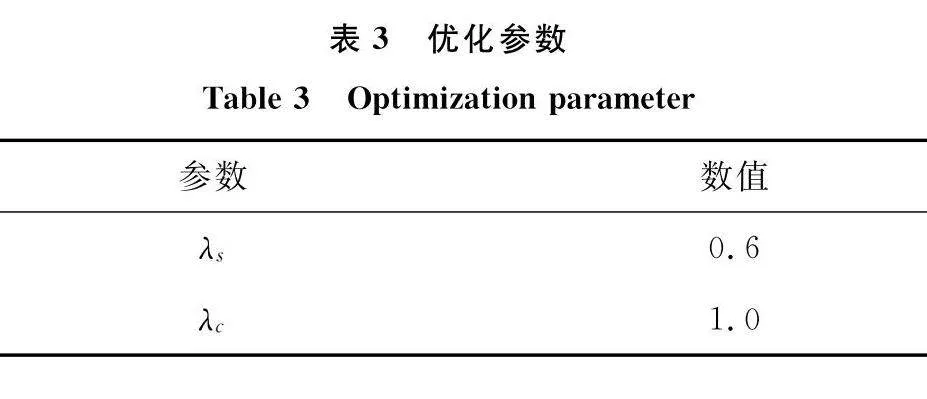
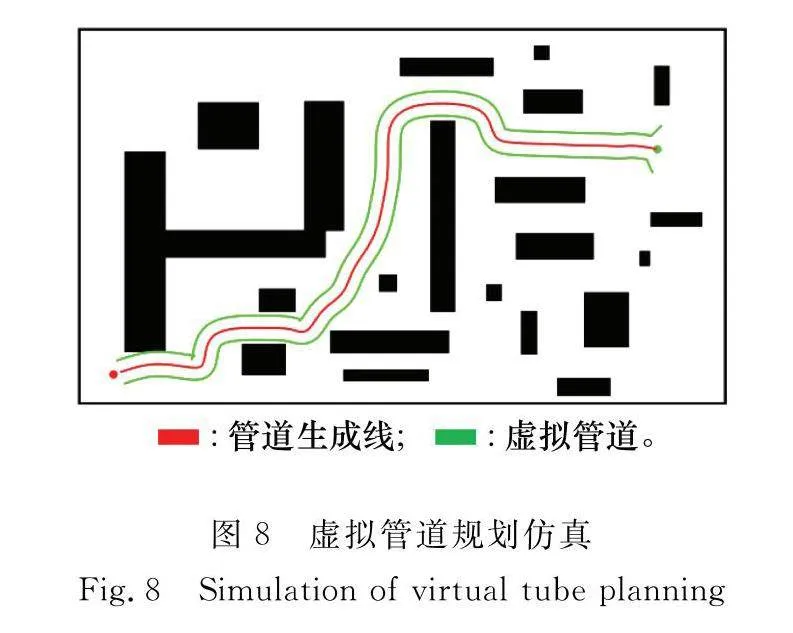
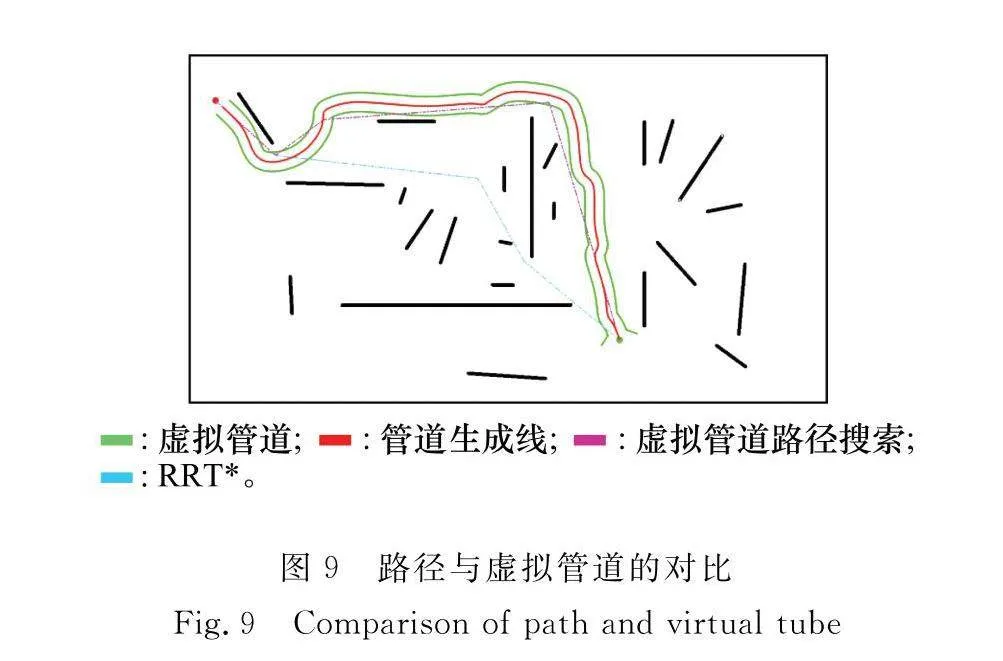
軌跡優化參數設置如表3所示,優化問題求解使用梯度下降法。由圖8和圖9可知,優化后的軌跡可以遠離障礙物,為虛擬管道提供了足夠的空間。得益于管道生成線兩側有足夠的空間,規劃的虛擬管道基本避免了因距離障礙物過近而收縮管道,避免了狹窄的虛擬管道。合理地設置管道最大半徑和搜索參數設置,可以保證管道全程為最大半徑而不收縮。本文主要討論管道的規劃,虛擬管道的生成和集群分布式控制采用已有方法[1011]。
4.3 管道通行測試與對比
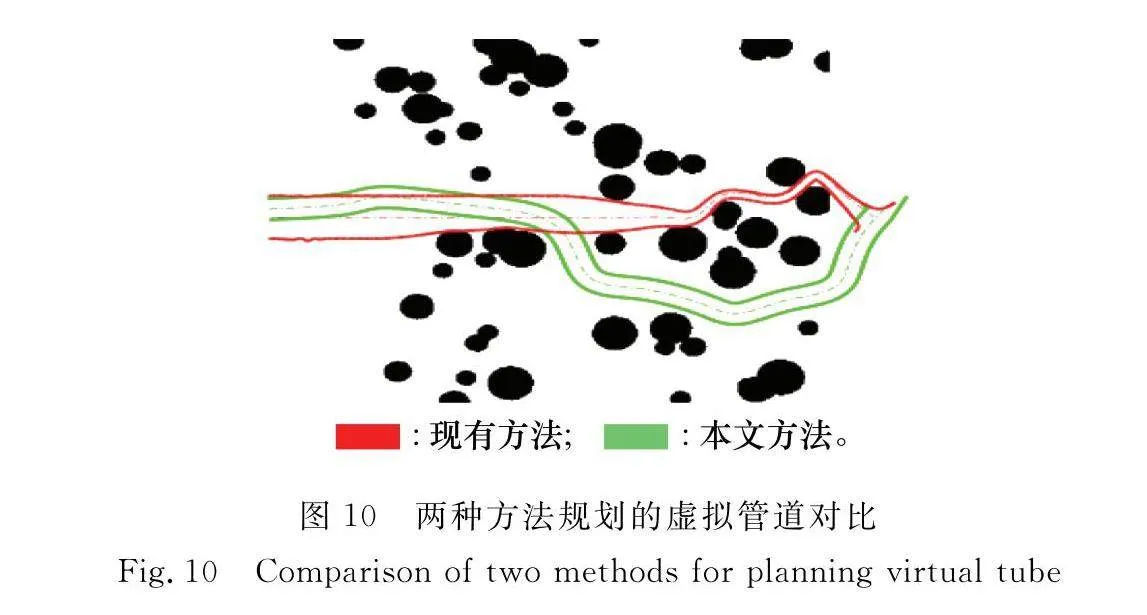
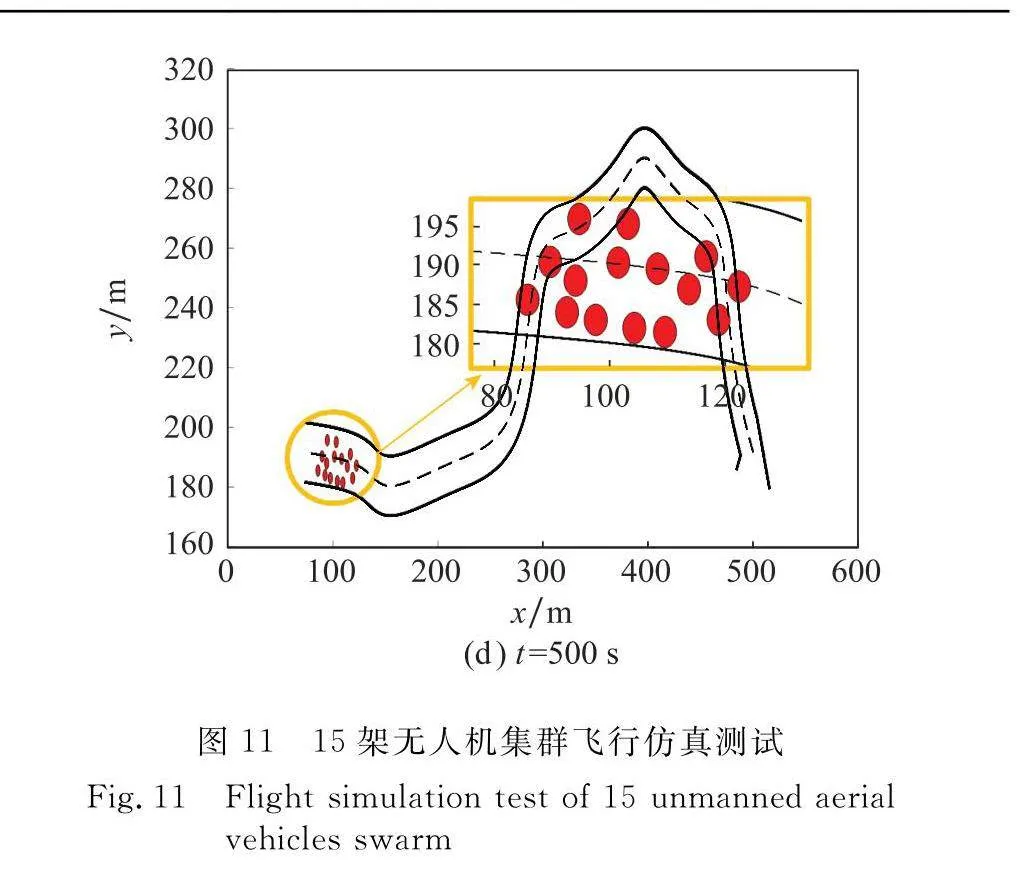
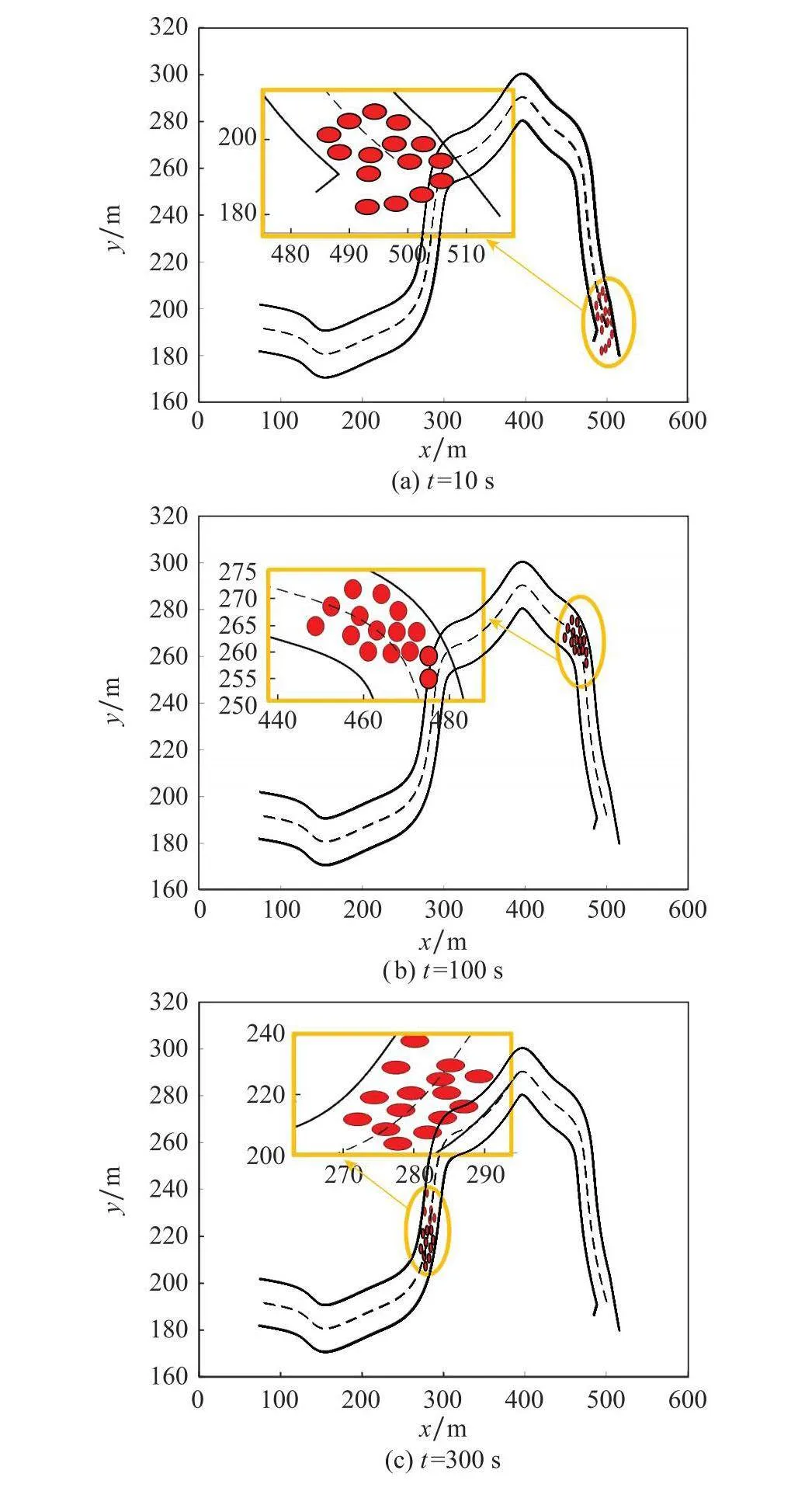
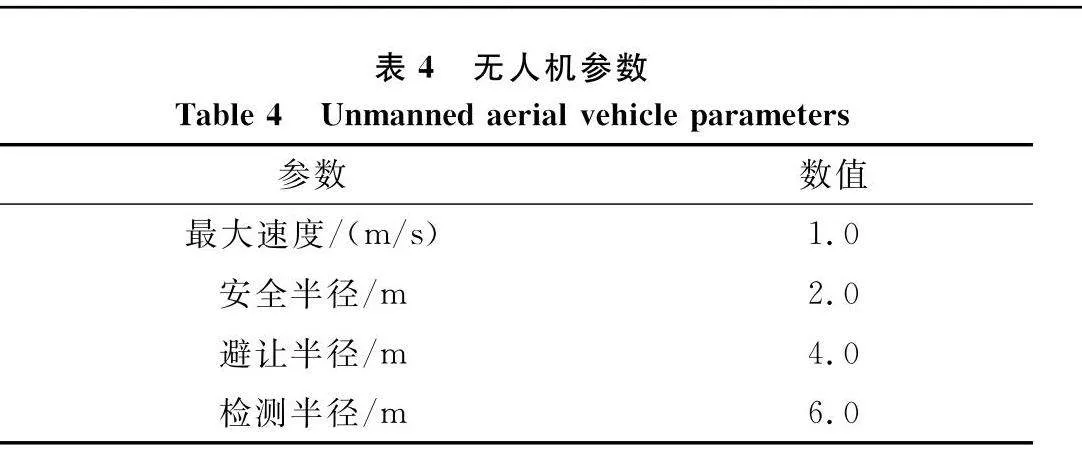
基于文獻[9]中虛擬管道通行設計,在本文所規劃的虛擬管道中仿真測試不同數量的集群。首先,在若干包含障礙物的地圖中設置起始點[500,192],終點[70,192],最大管道寬度均設置為20,其他參數設置如表4所示。如圖10所示,紅色實線為現有方法規劃的非正則曲線虛擬管道,采用A*加Minimum-Snap;綠色實線為本文方法規劃的虛擬管道。在虛擬管道中最多測試了15架無人機的集群,如圖11所示,展示了4個時刻的通行狀態。
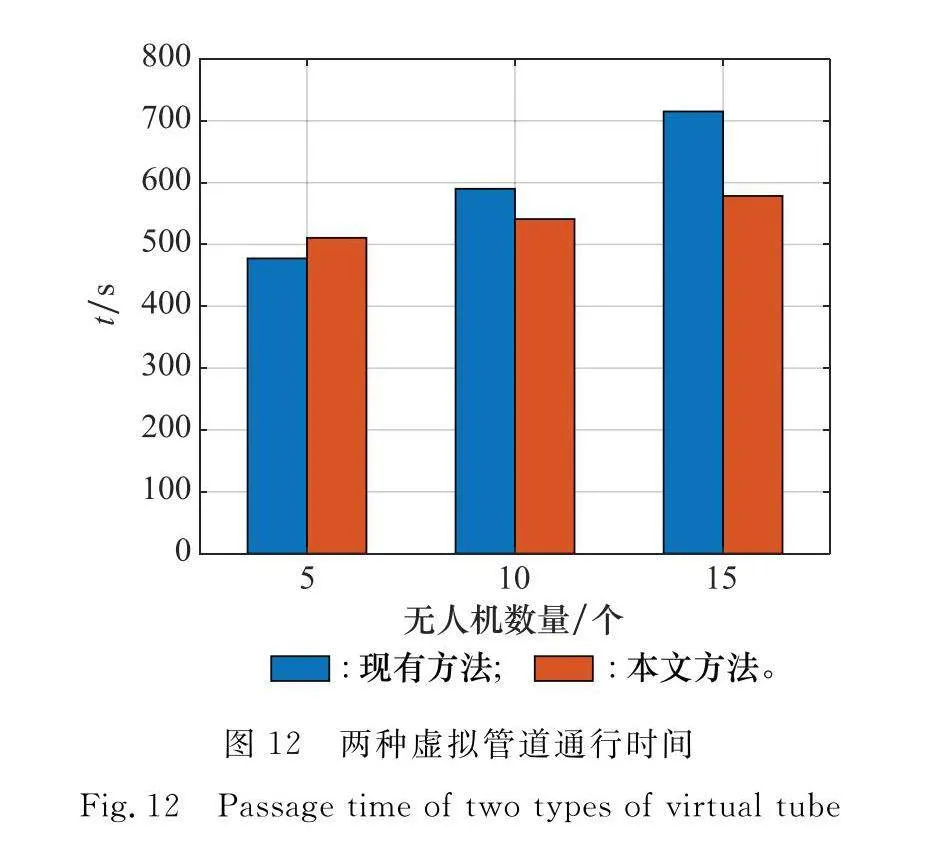
不同數量的無人機集群在兩種管道內的通行時間如圖12所示,圖中橫坐標為集群內無人機數量,縱坐標為全部飛機通過虛擬管道終點線的時間。隨著集群規模逐步擴大,對管道寬度要求也逐漸提高,狹窄的虛擬管道容易出現堵塞,本文所提方法所規劃的虛擬管道在通行時間方面的優勢越來越顯著。更寬的管道允許更多的無人機并行通過,大大提升了管道流速。
4.4 軟件在環仿真
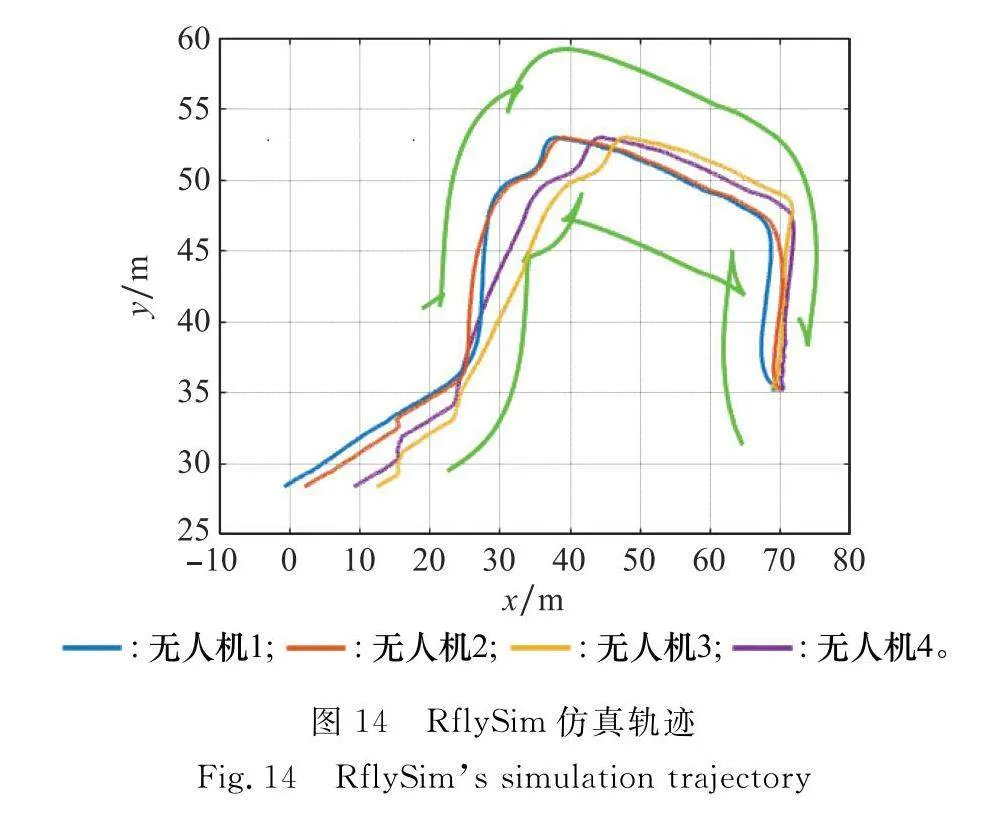
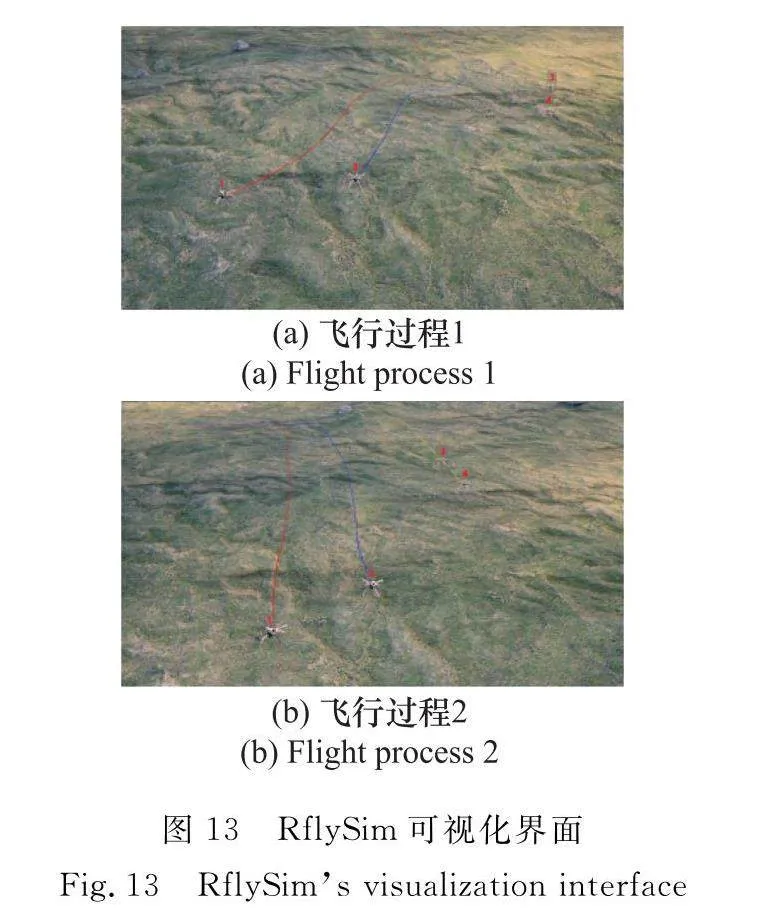
在RflySim[30]可視化仿真平架中測試了虛擬管道飛行,仿真界面如圖13所示。生成的虛擬管道為二維,Z軸為定高。所得仿真數據如圖14所示,綠色是虛擬管道兩側的管道壁,圖中彩色的曲線簇為4架無人機在仿真中的軌跡曲線。所有無人機起飛后,以虛擬管道起點入口為目標點,使所有飛機到達管道起點,在該過程中以及到達時不考慮碰撞。待所有飛機到達管道入口起點處,切換虛擬管道的分布式控制,無人機集群在管道內自主飛行,逐步接近虛擬管道終點線。通過RflySim可視化仿真平架可以實時觀測飛行界面。
由圖14可知,無人機可以在虛擬管道內飛行而不發生碰撞,同時更寬的虛擬管道允許更多的飛機并行通過。由可視化仿真界面可以看出,無人機1和無人機2基本保持并排飛行,提高了通行效率。由于無人機3和無人機4在轉向的外側,且集群內所有個體最大速度設置相同,因此無人機3和無人機4逐步落后。若為更大規模的集群,虛擬管道的空間將充分利用,最大程度地提高無人機集群的通行效率。
5 結 論
本文提出一種虛擬管道空間滿足規劃方法,可以在包含障礙物的環境中搜索出一條滿足空間要求的虛擬管道。本文方法主要包括基于RRT*的空間滿足路徑搜索以及軌跡優化。通過仿真驗證測試,證實所提出的虛擬管道規劃方法可以提高無人機集群的通行效率,降低通行時間。隨著無人機體積或無人機集群規模的增加,所提方法的優勢越來越顯著。
參考文獻
[1] 齊小剛, 周雨桐, 劉立芳. 無人機集群對地作戰任務可靠性評估[J]. 系統工程與電子技術, 2023, 45(9): 29712978.
QI X G, ZHOU Y T, LIU L F. Evaluation of the reliability of UAV swarm for ground combat missions[J]. Systems Engineering and Electronics, 2023, 45(9): 29712978.
[2] 張洪海, 任真蘋, 馮謳歌, 等. 城市低空物流無人機飛行計劃預先調配[J]. 系統工程與電子技術, 2023, 45(9): 28022811.
ZHANG H H, REN Z P, FENG O G, et al. Logistics unmanned aerial vehicle flight plan pre-allocation in urban low-altitude airspace[J]. Systems Engineering and Electronics, 2023, 45(9): 28022811.
[3] 王寧, 李哲, 梁曉龍, 等. 通信距離受限條件下的無人機集群協同區域搜索[J]. 系統工程與電子技術, 202 44(5): 16151625.
WANG N, LI Z, LIANG X L, et al. Cooperative region search of UAV swarm with limited communication distance[J]. Systems Engineering and Electronics, 202 44(5): 16151625.
[4] CHUNG S J, PARANJAPE A A, DAMES P, et al. A survey on aerial swarm robotics[J]. IEEE Trans.on Robotics, 2018, 34(4): 837855.
[5] MIAO Z, THAKUR D, ERWIN R S, et al. Orthogonal vector field-based control for a multi-robot system circumnavigating a moving target in 3D[C]∥Proc.of the IEEE 55th Conference on Decision and Control, 2016: 60046009.
[6] WANG L, AMES A D, EGERSTEDT M. Safety barrier certificates for collisions-free multirobot systems[J]. IEEE Trans.on Robotics, 2017, 33(3): 661674.
[7] VASARHELYI G, VIRAGH C, SOMORJAI G, et al. Optimized flocking of autonomous drones in confined environments[J]. Science Robotics, 2018, 3(20): eaat3536.
[8] QUAN Q, FU R, LI M X, et al. Practical distributed control for VTOL UAVs to pass a virtual tube[J]. IEEE Trans.on Intelligent Vehicles, 202 7(2): 342353.
[9] GAO Y, BAI C G, QUAN Q. Distributed control for a multi-agent system to pass through a connected quadrangle virtual tube[J]. IEEE Trans.on Control of Network Systems, 202 10(2): 693705.
[10] QUAN Q, GAO Y, BAI C G. Distributed control for a robotic swarm to pass through a curve virtual tube[J]. Robotics and Autonomous Systems, 2023, 162: 104368.
[11] MAO P D, QUAN Q. Making robotics swarm flow more smoothly: a regular virtual tube model[C]∥Proc.of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2022: 44984504.
[12] TSENG F H, LIANG T T, LEE C H, et al. A star search algorithm for civil UAV path planning with 3G communication[C]∥Proc.of the IEEE 10th International Conference on Intelligent Information Hiding and Multimedia Signal Processing, 2014: 942945.
[13] KARAMAN S, WALTER M R, PEREZ A, et al. Anytime motion planning using the RRT[C]∥Proc.of the IEEE International Conference on Robotics and Automation, 2011: 14781483.
[14] MELLINGER D, KUMAR V. Minimum snap trajectory gene-ration and control for quadrotors[C]∥Proc.of the IEEE International Conference on Robotics and Automation, 2011: 25202525.
[15] RICHTER C, BRY A, ROY N. Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments[C]∥Proc.of the 16th International Symposium for Robotics Research, 2016: 649666.
[16] LIU S, WATTERSON M, MOHTA K, et al. Planning dynamically feasible trajectories for quadrotors using safe flight corridors in 3-D complex environments[J]. IEEE Robotics and Automation Letters, 2017, 2(3): 16881695.
[17] PARK J, KIM H J. Online trajectory planning for multiple quadrotors in dynamic environments using relative safe flight corridor[J]. IEEE Robotics and Automation Letters, 2020, 6(2): 659666.
[18] GAO F, WU W, LIN Y, et al. Online safe trajectory generation for quadrotors using fast marching method and Bernstein basis polynomial[C]∥Proc.of the IEEE International Confe-rence on Robotics and Automation, 2018: 344351.
[19] ZHOU B Y, GAO F, WANG L Q, et al. Robust and efficient quadrotor trajectory generation for fast autonomous flight[J]. IEEE Robotics and Automation Letters, 2019, 4(4): 35293536.
[20] ZHOU X, WANG Z P, YE H K, et al. EGO-planner: an ESDF-free gradient-based local planner for quadrotors[J]. IEEE Robotics and Automation Letters, 2020, 6(2): 478485.
[21] ZHOU B, PAN J, GAO F, et al. Raptor: robust and perception-aware trajectory replanning for quadrotor fast flight[J]. IEEE Trans.on Robotics, 202 37(6): 19922009.
[22] GAO Y, BAI C G, ZHANG L, et al. Multi-UAV cooperative target encirclement within an annular virtual tube[J]. Aerospace Science and Technology, 202 128: 107800.
[23] FU R, QUAN Q, LI M X, et al. Practical distributed control for cooperative multicopters in structured free flight concepts[J]. IEEE Trans.on Intelligent Transportation Systems, 202 24(4): 42034216.
[24] MAO P D, FU R, QUAN Q. Optimal virtual tube planning and control for swarm robotics[J]. The International Journal of Robotics Research, 2024, 43(5): 602627.
[25] LYU S L, GAO Y, CHE J X, et al. Autonomous drone racing: time-optimal spatial iterative learning control within a virtual tube[C]∥Proc.of the IEEE International Conference on Robotics and Automation, 2023: 31973203.
[26] 楊小草, 都延麗, 步雨濃, 等. 基于層次分解的在線三維RRT*協同航路規劃[J]. 系統工程與電子技術, 2023, 45(5): 14091419.
YANG X C, DU Y L, BU Y N, et al. Online three-dimensional RRT* cooperative route planning based on hierarchical decomposition[J]. Systems Engineering and Electronics, 2023, 45(5): 14091419.
[27] 高升, 艾劍良, 王之豪. 混合種群RRT無人機航跡規劃方法[J]. 系統工程與電子技術, 2020, 42(1): 101107.
GAO S, AI J L, WANG Z H. Mixed population RRT algorithm for UAV path planning[J]. Systems Engineering and Electronics, 2020, 42(1): 101107.
[28] WANG Z P, ZHOU X, XU C, et al. Geometrically constrained trajectory optimization for multicopters[J]. IEEE Trans.on Robotics, 202 38(5): 32593278.
[29] QUINLAN S, KHATIB O. Elastic bands: connecting path planning and control[C]∥Proc.of the IEEE International Conference on Robotics and Automation, 1993: 802807.
[30] WANG S, DAI X H, KE C X, et al. RflySim: a rapid multicopter development platform for education and research based on Pixhawk and Matlab[C]∥Proc.of the IEEE International Conference on Unmanned Aircraft Systems, 2021: 15871594.
作者簡介
肖士博(1999—),男,碩士研究生,主要研究方向為四旋翼無人機運動規劃。
齊國元(1970—),男,教授,博士,主要研究方向為無人機底層控制、集群避障、非線性系統控制。
鄧嘉豪(1998—),男,博士研究生,主要研究方向為無人機抗擾控制、集群控制。
蘇鵬鵬(1999—),男,碩士研究生,主要研究方向為無人機抗擾控制、集群控制。
賈晶童(1997—),男,博士研究生,主要研究方向為無人機集群避障。