基于數據合成的飛行器結構損傷狀態快速識別方法
2024-11-25 00:00:00王浩淵粟華李鵬龔春林
系統工程與電子技術 2024年11期





摘要: 針對當前飛行器結構健康監測過程中存在的識別流程復雜、識別準確度低的問題,提出一種基于數據合成的飛行器結構損傷狀態快速識別方法。建立數字孿生結構損傷快速識別模型構建流程,構建飛行器結構數字模型。基于數據合成思想,提出一種對傳感器數據的可信度評價方法,建立具有可解釋性的生成-判別模型,解決了因樣本數據不足導致的學習準確率低的問題。引入分類邊界模糊化方法,使用判別模型確定模糊化區域以提升神經網絡識別的穩定性。最后,以某無人機為例,對所提識別方法進行驗證。結果表明,該方法能夠高效構建結構損傷狀態數據庫并提升識別泛化能力和穩定性,對損傷狀態的識別準確率超過99%。
關鍵詞: 數字孿生; 結構健康監測; 損傷檢測; 數據合成; 神經網絡
中圖分類號: V 11
文獻標志碼: A
DOI:10.12305/j.issn.1001-506X.2024.11.19
Rapid identification method for aircraft structural damage patterns based on data synthesis
WANG Haoyuan1, SU Hua1,2,*, LI Peng3, GONG Chunlin1,2
(1. School of Astronautics, Northwestern Polytechnical University, Xi’an 710072, China;
2. Shaanxi Aerospace Flight Vehicle Design Key Laboratory, Xi’an 710072, China;
3. Xi’an Institute of Modern Control Technology, Xi’an 710065, China)
Abstract: In response to the complexity of the identification process and the low accuracy of identification in the current health monitoring process of aircraft structures, a rapid identification method for aircraft structural damage patterns based on data synthesis is proposed. A digital twin structure damage rapid identification model construction process is established to construct a digital model of aircraft structure. Based on the idea of data synthesis, a credibility evaluation method for sensor data is proposed, and an interpretable generative-discriminative model is established to solve the problem of low learning accuracy due to insufficient sample data. The method of fuzzy classification boundary is introduced, and the discriminative model is used to determine the fuzzy area to improve the stability of neural network identification. Finally, the proposed identification method is verified with a certain drone as an example. The results show that this method can efficiently build a structural damage pattern database and improve the generalization ability and stability of identification, with an identification accuracy rate of over 99% for damage patterns.
Keywords: digital twin; structural health monitoring; damage detection; data synthesis; neural network
0 引 言
隨著航空航天技術的發展,飛行器結構越來越輕量化[1-2],飛行速度逐漸提高,未來高價值飛行器處于極端飛行條件下時,可能出現結構的突變性損傷,危及飛行安全。目前的飛行器結構健康管理主要由對結構進行定期檢修保養[3]和結構健康監測(structural health monitoring, SHM)技術[4-5]兩部分組成。傳統地面檢修要求對飛行器周期性停機維護,流程復雜、耗費時間長,且需要大量經過長期培訓的專業檢修人員。而SHM技術采用嵌入或附著在結構上的傳感器[6-7],對系統進行檢測和分析,使用傳感器測量的結構響應信息來監測結構的材料屬性和幾何特征的變化,是一種非破壞性的原位結構評估方法[8-12],近年來得到了大量研究和關注。
SHM技術具有原位監測和在線診斷的能力,對確保飛行器結構完整性、可靠性和安全性有重大意義[13]。飛行器在面對突變型損傷時,需要實時獲取結構健康狀態并動態規劃飛行任務,避免損傷的進一步擴大乃至發生飛行器的損毀,飛行器需要具備實時感知整體結構損傷狀態的能力。但當前SHM技術硬件系統復雜、成本高昂[14-15],且多關注于細觀結構損傷情況,缺少高效的飛行器結構整體狀態識別方法。
而數字孿生[16-17]作為一種新的數據驅動范式,通過建立物理實體的高保真數字鏡像和機器學習的方法實現對物理實體的信息進行數據挖掘和可視化,實時地檢測實體狀態。數字孿生是以數字化的方式建立物理實體多學科的動態虛擬模型,是對物理實體的數字化表示[18]。Dang等[19]提出一種基于云計算和深度學習技術的結構健康檢測數字孿生框架,對結構執行實時監測和主動維護。Ye等[20]提出一種用于可重復使用航天器結構健康管理的數字孿生框架,并證明數字孿生可以減少識別的不確定性。Kapteyn等[21]提出一種基于組件的簡化模型庫和通過貝葉斯狀態估計來創建數據驅動的物理數字孿生方法。王子一等[22]提出一種基于概率神經網路(probabilistic neural network, PNN)的數字孿生機翼損傷狀態快速識別與監測方法。
當前,數據驅動的結構數字孿生方法已經能夠實現對飛行器結構損傷的準確表達和預測,但當飛行器結構較為復雜、區塊劃分較多或損傷等級劃分更細時,由于一般掌握的數據為飛行器實測數據和仿真數據,樣本規模較小,若使用簡單識別模型學習會導致分類精度不足,若使用復雜模型或深度學習方法訓練則會導致模型過擬合。
當前解決樣本量很少的小樣本學習問題常用數據增強的方法[23],包括基于無標簽數據[24-25]、基于特征增強[26]、基于數據合成[27]這三類方法。數據合成方法即在已有樣本集的基礎上生成增廣樣本集,常用的方法為生成對抗網絡(generative adversarial network, GAN)[28],GAN方法使用生成器生成合成數據,使用判別器判別數據的真實性,以實現生成接近真實數據的合成數據。Jiang等[29]基于Transformer思想提出改進的對抗生成模型TransGAN,增強了模型的全局表達能力。數據合成方法能夠通過生成合成數據來解決小樣本結構檢測問題,但當前基于GAN思想的數據合成方法計算量巨大,且可解釋性不足,不能給出判定樣本真實性的準確依據。
針對以上問題,本文提出一種基于數據合成的飛行器結構損傷狀態快速識別方法。引入數字孿生思想,構建飛行器結構數字孿生模型,設計了數字孿生結構損傷快速識別模型構建流程。采用數據合成方法的生成、判別思想,使用可解釋性的模型作為合成方法的生成器和判別器,并提出對合成數據的可信度判別依據,實現生成可信度高的合成數據加入訓練集,提升訓練后識別模型的泛化能力。引入分類邊界模糊化方法,使用判別器來確定邊界模糊化系數,解決邊界分類不穩定問題。最后,以某型無人機為案例驗證了該方法的有效性。
1 飛行器結構損傷快速識別流程
本文旨在對飛行器整體結構的健康狀態進行識別,以模塊化的方式建立飛行器物理實體整體的數字孿生模型[30-31],該數字模型刻畫了飛行器的結構健康狀態,并使用簡單傳感器獲取的數據,對模型進行動態更新,以保證該模型實時反映飛行器的結構損傷情況。
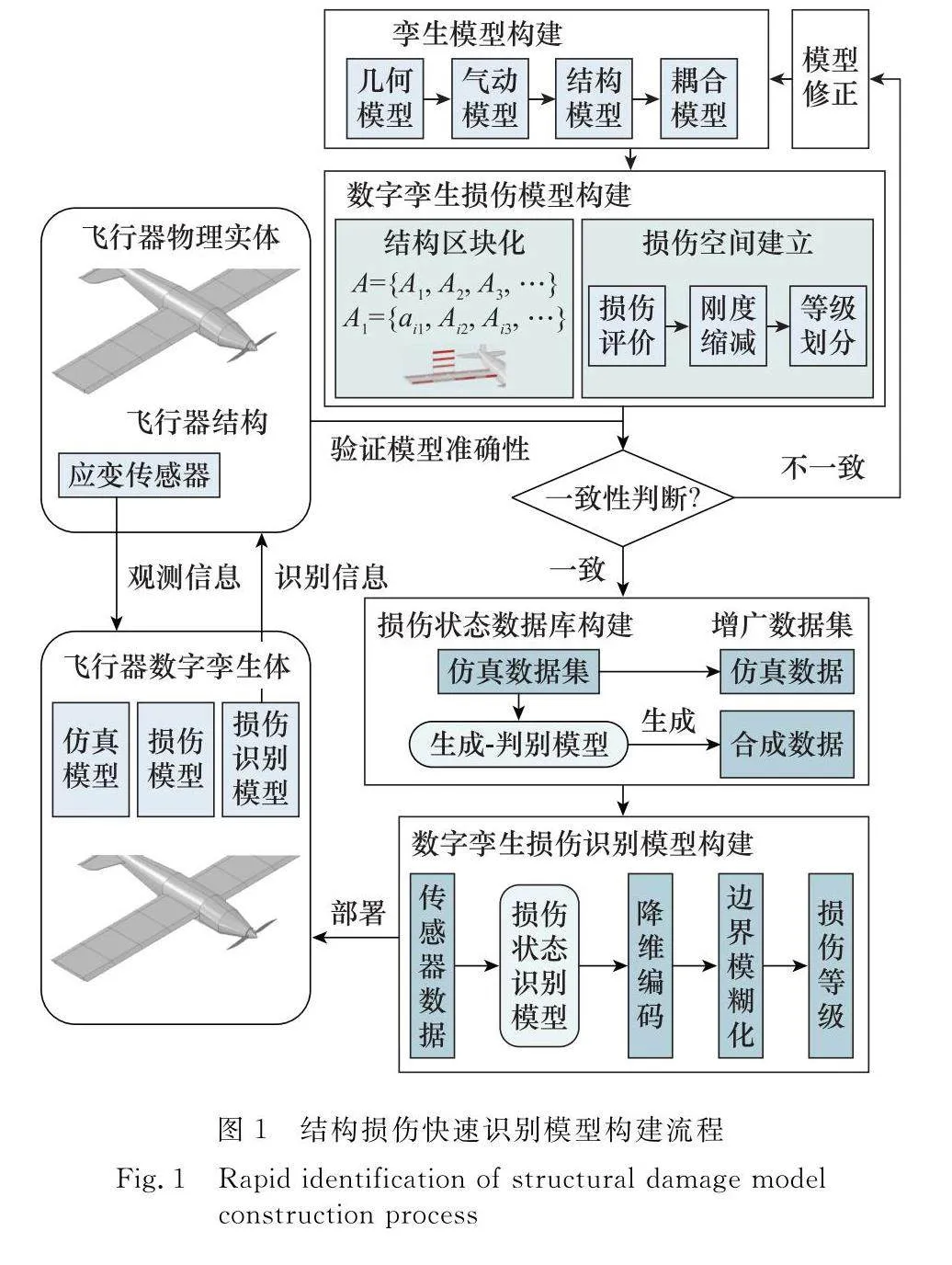
本文的結構損傷快速識別模型構建流程如圖1所示,包含以下5個步驟:數字孿生仿真模型構建、數字孿生損傷模型構建、模型一致性判斷、損傷狀態數據庫構建、數字孿生損傷識別模型構建。完成構建后,進行飛行器數字孿生體的部署。
1.1 數字孿生仿真模型構建
飛行器數字孿生仿真模型的構建流程分如下:幾何模型構建、氣動模型構建、結構模型構建、耦合模型構建和模型校準。數字孿生模型使用有限元方法對飛行器進行物理仿真,依此建立飛行器的多物理場耦合模型。
1.2 數字孿生損傷模型構建
飛行器數字孿生損傷模型使用常用的區塊剛度縮減模型,對結構劃分區塊并通過區塊剛度縮減的方式表示結構的損傷。
1.2.1 飛行器區塊化建模
使用結構剛度損失的方式表達每個區塊的損傷情況,既可以表達損傷的位置信息,又可以很好地反映損傷對結構影響的嚴重程度。飛行器數字孿生體使用總裝配體-部件-區塊的結構層次建模,其表示為
A={A1,A2,…,ANA}
Ai={ai,1,ai,2,…,ai,NAi} (1)
式中:A表示飛行器總裝配體;Ai表示裝配體中的各部件,i為部件序號;NA表示部件總數;ai,j表示部件Ai中的所劃分的第l號損傷區塊,NAi為部件Ai的區塊數。
1.2.2 數字孿生體損傷空間建立
結構的細觀損傷有多種模式,包括斷裂、分層、缺失、退化等,這些損傷的影響都可以表征為結構剛度的改變,通過結構剛度的損失度信息來表示飛行器結構損傷的嚴重程度。結構剛度損失向量B為
B=(s1,s2,…,sn)
sl=El0-ElEl0·100% (2)
式中:sl表示了第l個區塊的剛度損失系數,sl∈[0,1],值越大則表示損傷越嚴重;n為部件區塊總數;El0表示第l個區塊無損傷時的剛度;El表示第l個區塊的當前剛度。
飛行器結構數字孿生體采用損傷等級表示區塊的損傷程度,通過將剛度損失向量B轉化為損傷等級向量Bc,實現使用類別數據來表示部件的損傷狀態。損傷等級向量的表示為
Bc=(k1,k2,…,kn)
kl∈{0,1,…,Lmax-1} (3)
式中:kl表示了第l個區塊的損傷等級;Lmax-1表示區塊最嚴重損傷的損傷等級。具體的損傷度和損傷狀態轉換關系可根據實際結構力學試驗來確定。
1.3 模型一致性判斷
完成數字孿生仿真模型和損傷模型的構建后,通過飛行器物理模型的實測數據對以上模型進行一致性判斷。若和實際物理模型的一致性較低,則返回對仿真模型進行修正;若一致性較高則構建損傷狀態數據庫。
1.4 損傷狀態數據庫構建
為了得到損傷狀態識別模型的訓練數據,需要建立數字孿生損傷狀態數據庫M。目前的方法為對飛行器在大量隨機損傷狀態下進行仿真,當損傷模型的復雜度增加時,為了保證識別模型的訓練效果,數據庫的規模也需要相應的增大。本文提出基于生成-判別模型的損傷狀態數據庫增廣方法,僅需要對損傷狀態少量隨機采樣,對仿真結果應用合成方法就可以得到大規模的增廣訓練數據庫,顯著提升識別模型的訓練效果。
1.5 數字孿生損傷狀態識別模型構建
數字孿生體要做到實時地表示飛行器物理實體的結構狀態,需要獲取結構傳感器觀測數據,快速識別結構損傷狀態,更新數字孿生體。傳感器的觀測信息由向量qt表示:qt∈Q。qt表示在t時刻傳感器的觀測數據;Q為傳感器的取值空間。
將損傷狀態識別模型用映射T表示,該識別模型的數學定義為
T:Q→M
本文使用反向傳播(back propagation, BP)神經網絡作為識別模型T,通過T識別出結構損傷狀態從而更新數字孿生體。
2 基于數據合成的損傷識別方法
由于對大量隨機損傷狀態進行高精度的有限元仿真所需要的計算資源較大,為了獲得足夠規模的損傷狀態數據庫作為訓練集,對數據庫進行數據合成。
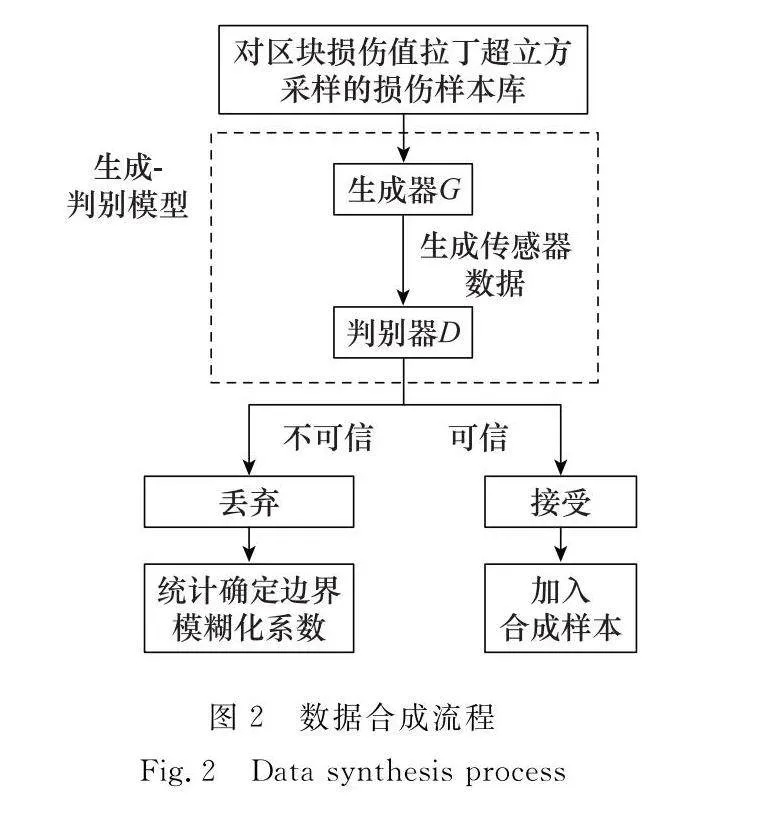
本文采用了基于生成-判別思想的數據增廣方法,數據的合成流程如圖2所示。使用Kriging模型作為生成器生成數據,使用近鄰樣本可信度評價模型作為判別器對合成數據進行篩選,實現對訓練樣本的數據合成處理,獲得增廣損傷狀態數據庫。擴大數據集的規模能夠大幅度提升識別模型的泛化能力。
2.1 基于Kriging模型的數據生成器
Kriging模型是一種通過已知試驗點信息來預測未知試驗點響應的無偏估計模型[32],本文使用Kriging模型構建生成器G的生成方法:
q~=G(B)=Gk(Β)+gn,
gn~N(0,σ2)
Σn=diag(σ21,σ22,…,σ2n)(4)
式中:B為隨機的損傷狀態;q~為生成的傳感器數據;G(·)表示從損傷狀態到生成傳感器數值的生成函數,Gk(·)為用仿真數據構建的Kriging模型;gn為添加的高斯誤差;Σn為gn所對應的協方差矩陣。
通過隨機采樣m個損傷狀態作為采樣損傷狀態Msample∈M,將損傷向量B的值作為樣本點數據,仿真得到的傳感器數據qsample∈M作為樣本點響應,其表示的映射關系為T的逆映射:
T~:M→Q
將該逆映射對應的函數:區塊損傷向量到傳感器數據,記為T~(B),使用生成器建立該函數的近似模型,再隨機生成大量區塊損傷向量作為試驗點,并使用生成器計算其響應值(傳感器數值),實現基于仿真數據的數據合成。
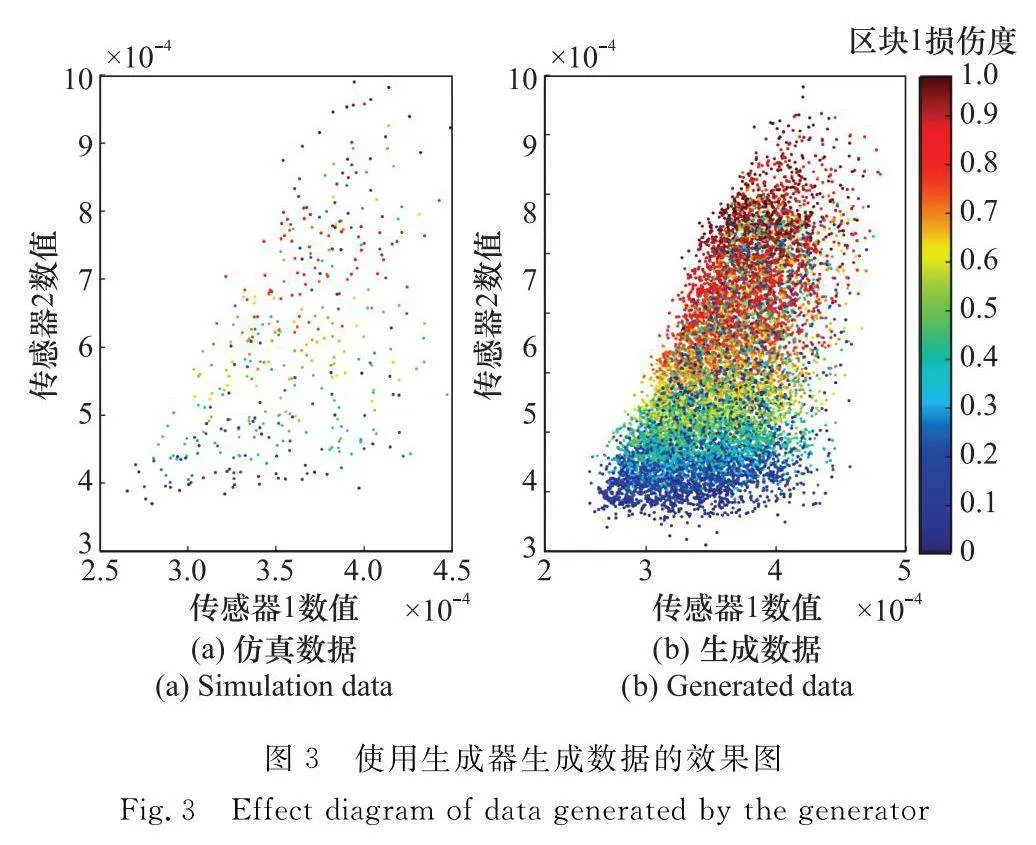
圖3展示了使用生成器進行數據合成的效果:取Nsim=500,Ngen=10 000,以傳感器1、傳感器2的值為橫、縱坐標,以區塊1的剛度縮減值展示插值結果。
圖3(a)中,中央及下方部分樣本之間的區塊損傷度變化較大,需要更多的生成樣本以實現對損傷的準確識別;圖3(a)中的上方部分,因為區塊的損傷較大,導致相同剛度差異下傳感器數值的差異更大,造成樣本點更為稀疏,但由于區塊損傷度變化較小,故該區域相對稀疏的生成樣本不會影響識別準確率。由圖3(b)中可知生成數據良好滿足以上分布規律。
2.2 基于近鄰樣本可信度評價的數據判別器
K近鄰(K-nearest neighbors, KNN)模型是一種通過未知點與已知點距離信息來預測未知點類別的機器學習方法[33],本文基于KNN的思想,提出一種基于近鄰樣本的合成數據可信度評判方法。判別模型能夠評價生成數據對每個損傷區塊的可信度,以進行篩選,提升對損傷識別模型的訓練效果。
2.2.1 判別器模型及可信度評價方法
記判別器使用到的數據中,仿真數據集為Dsim={(x1,y1),(x2,y2),…,(xNsim,yNsim)},合成數據集為Dgen={(x1,y1),(x2,y2),…,(xNgen,yNgen)},其中數據的特征x為傳感器數據q,數據標簽y為樣本的損傷類別。對于生成數據(x,y),本文的判別模型為
D(x,y)=I∑nl=1Rl(x,y)gt;n2(5)
式中:Rl(x,y)為對生成數據關于第l個區塊的可信度評價模型;n/2為容許的最低可信度;I(·)為指示函數,當大于條件滿足時取值為1,否則為0。Rl(x,y)的取值范圍為[0,1],若數據的可信度較高則說明數據位于類別區域的內部;可信度較低則說明生成數據位于分類邊界附近,可能會影響損傷狀態分類模型的學習效果。D(x,y)取值為1表示接受數據(x,y),取值為0則丟棄數據。
可信度評價模型Rl(x,y)的具體定義為
Rl(x,y)=Rsiml(x,y)·Rgenl(x,y)
Rsiml(x,y)=∑(xi,yi)∈N1I(y=yi), i=1
Rgenl(x,y)=∑(xi,yi)∈NkI(y=yi)kl, i=1,2,…,kl(6)
式中:Rsiml(x,y)為生成數據基于仿真數據集Dsim的可信度評價;Rgenl(x,y)為生成數據基于合成數據集Dgen的可信度評價;N1表示數據集Dsim中x的最近鄰點;Nk表示數據集Dgen中x最近鄰的kl個點的集合。
2.2.2 基于網格搜索法的參數確定
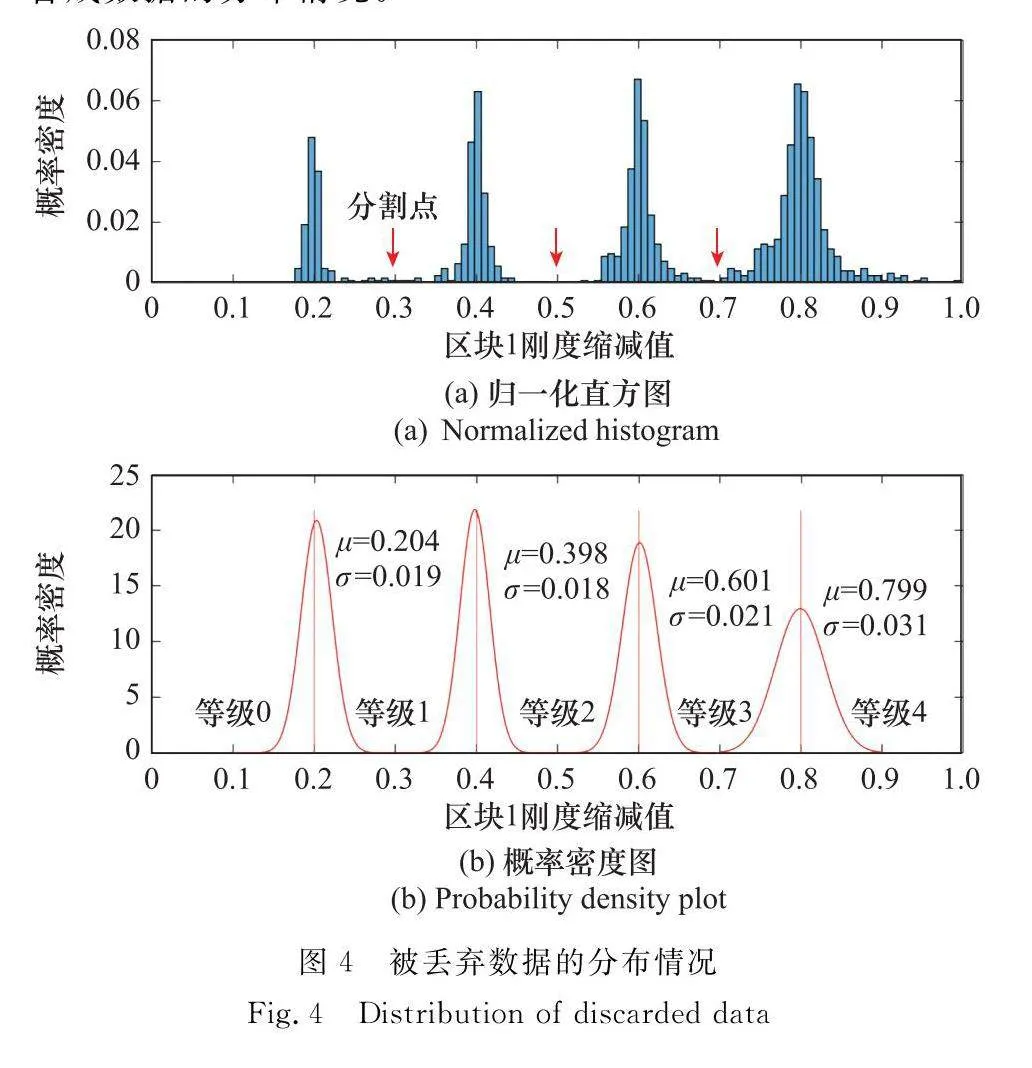
以區塊1為例,使用判別器D1(·)對第2.1節生成的合成數據進行判別篩選(取k1=10)。圖4展示了被丟棄的合成數據的分布情況。
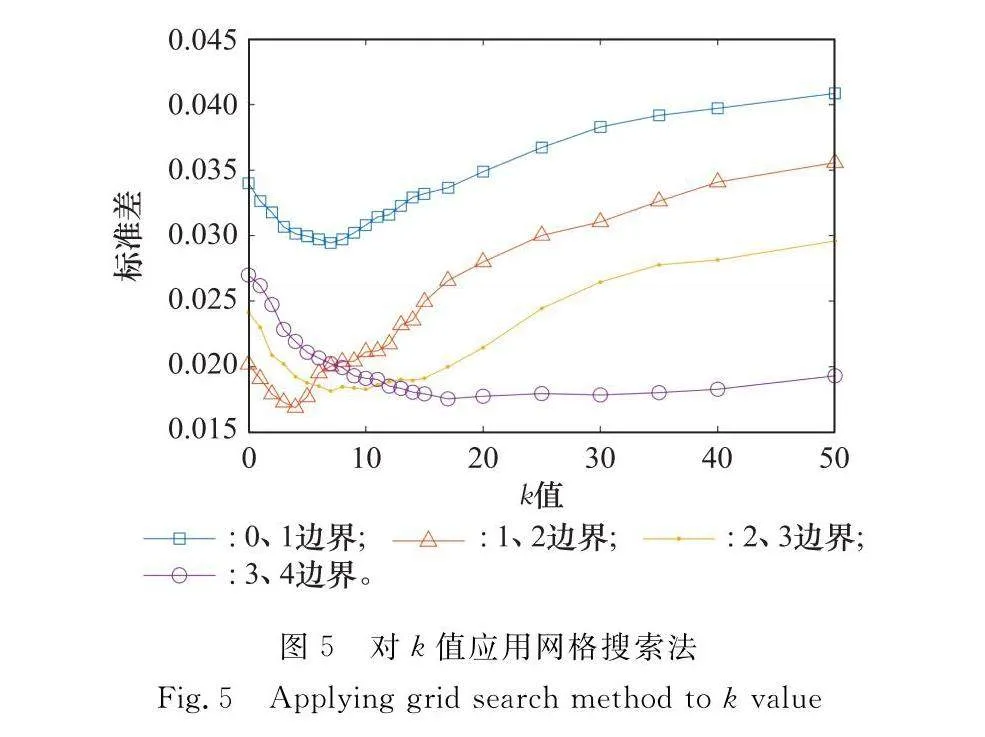
被丟棄的合成數據集中分布于每個損傷等級的交接處,以各損傷等級的中值分割數據,每一段的數據分布近似于正態分布,可計算得到其均值和標準差(如圖4所示)。超參數kl取值的不同會影響被丟棄數據的分布,常用網格搜索法確定。基于網格搜索法分析kl對標準差的影響,如圖5所示。
各邊界數據分布的標準差在k1∈[4,20]范圍內出現最小值,考慮到計算成本可選擇損傷等級0、1邊界的最小值點k1=7作為k的合適取值。kl的取值取決于仿真數據集Dsim和合成數據集Dgen的影響,因此需要根據具體數據集搜索確定。
2.3 數字孿生損傷狀態識別模型
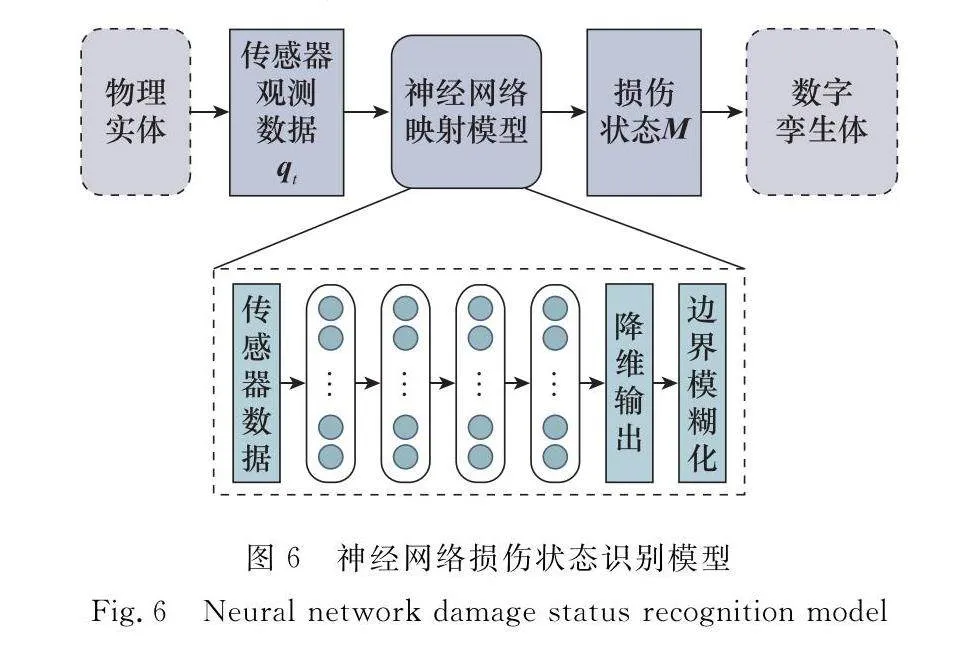
損傷狀態識別模型通過飛行器物理實體定期發送的傳感器觀測數據來識別飛行器的損傷狀態,實現動態更新數字孿生體,實時地反映結構的健康狀態。本文的識別方法基于每個時刻觀測的傳感器數據獨立預測,對漸變型結構退化和突變性損傷有著相同的識別準確性和穩定性。神經網絡模型采用BP神經網絡(BP neural network, BPNN),訓練使用自適應矩估計(adaptive moment estimation, Adam)優化方法,相較于傳統的隨機梯度下降(stochastic gradient descent, SGD)方法,Adam在內存占用方面更為節省且計算效率更高,適用于處理大規模數據和參數優化問題。使用神經網絡學習前文得到的增廣損傷狀態數據庫,構建數字孿生體的更新模型。神經網絡損傷狀態識別模型如圖6所示。
該神經網絡模型包括輸入層、4層全連接層和輸出層,全連接層使用ReLU函數引入非線性特征。傳感器觀測數據由輸入層傳入神經網絡,輸出層輸出識別出的損傷狀態。
2.4 損傷狀態降維編碼方法
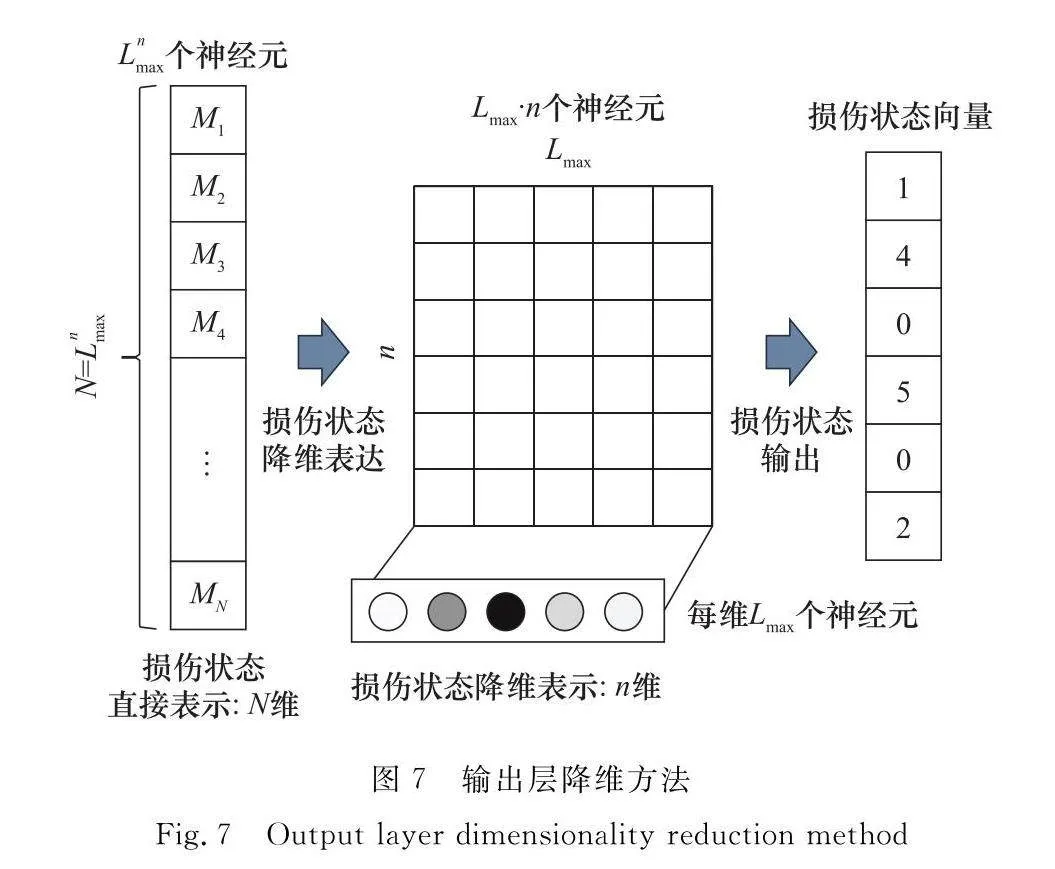
神經網絡的輸出層需要表達結構的損傷狀態,由于本數字孿生體共存在N=Lnmax種組合損傷狀態,為了使神經網絡映射模型T能夠簡明地輸出狀態信息,使用損傷狀態降維編碼方法。應用該編碼方法后的輸出層維度等于損傷區塊數n,每一個維度對應一個損傷區塊,其包含的神經元數等于損傷等級數Lmax,輸出值最大神經元的序號表示該區塊的損傷等級。輸出層總共所需的神經元數目為n·Lmax,圖7展示了該降維方法的示意。
該降維編碼方法大幅度減少了神經網絡的參數規模,從而實現了減少訓練和識別損傷狀態的計算量。
3 邊界模糊化方法
在神經網絡對區塊的剛度縮減值映射到損傷等級的過程中,由于對損傷等級的硬性劃分,在損傷等級邊界附近存在著分類不穩定現象。使用邊界模糊化方法,通過判別器篩選丟棄數據在邊界的分布定義邊界不確定性區間,實現對損傷等級的軟性分類,提高分類的穩定性。
3.1 邊界樣本誤分類現象
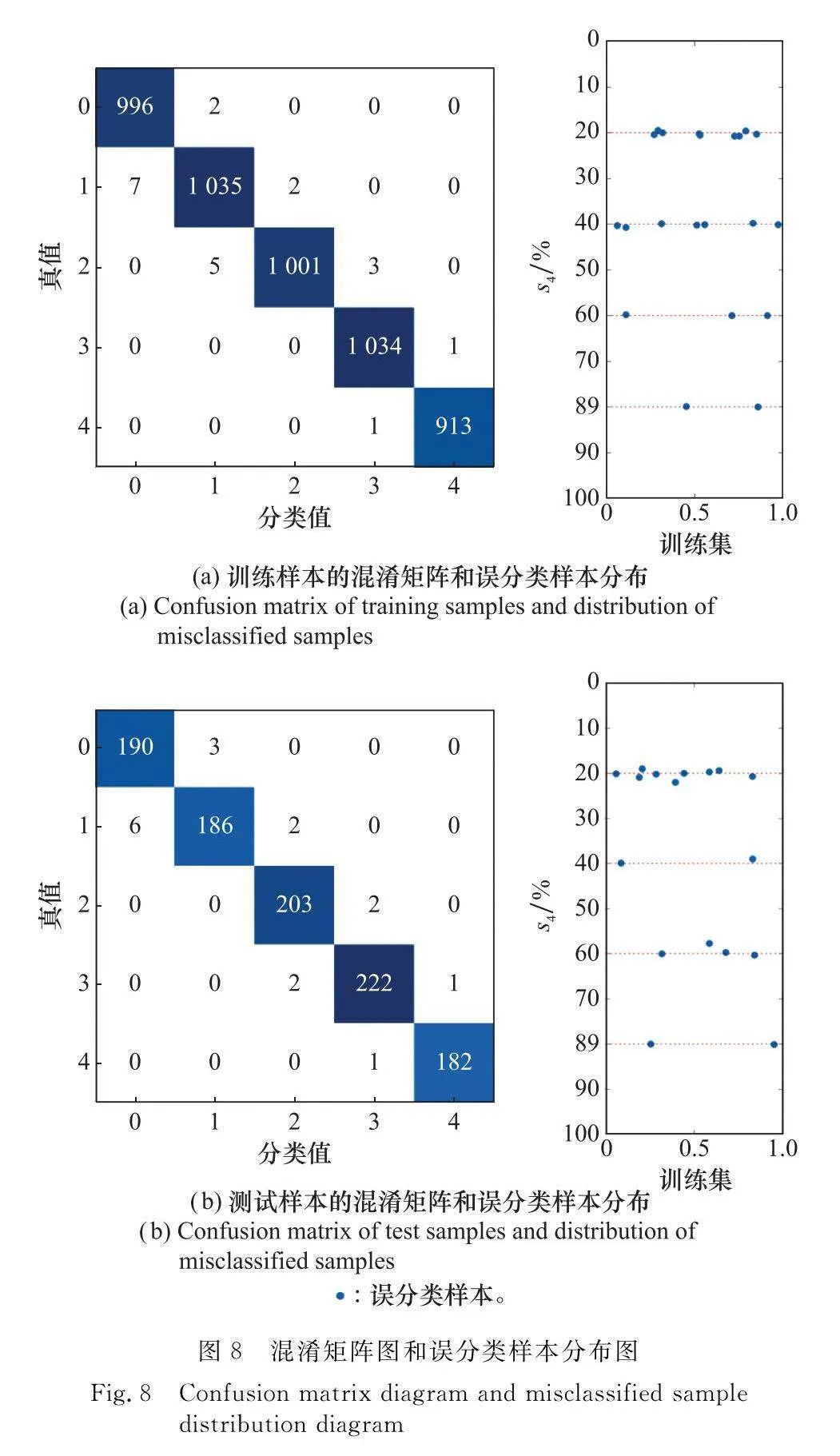
以區塊1為例,圖8展示了神經網絡對訓練樣本和測試樣本進行損傷等級分類的混淆矩陣圖。混淆矩陣圖的橫坐標為神經網絡的損傷等級分類結果,縱坐標為區塊損傷等級的真值,矩陣圖每個區域中的數字為樣本數,矩陣圖對角線處為進行了準確識別的樣本數。圖8的右半部分為區塊1誤分類樣本的分布圖,4根虛線分別對應混淆矩陣中5個損傷等級之間的相鄰邊界,可以發現所有的錯誤識別都在損傷等級的邊界附近,說明神經網絡錯誤地將損傷狀態分類到了真值的相鄰類別。
3.2 損傷等級邊界模糊化方法
邊界樣本誤分類現象實質上為決策行為在樣本值接近類別閾值時出現的不確定性現象。該損傷識別模型的誤分類很大程度上來自于這一現象,假設結構的一損傷區塊處于兩個損傷等級的界限上時,分類得到的區塊損傷等級會在兩個相鄰等級間浮動,這一問題是由分類邊界的硬性劃分導致的。本文通過損傷等級模糊化方法來解決這一問題:計算每一個損傷等級邊界不確定性區域,讓每個損傷區間包含不確定性區域形成模糊化損傷區間。不確定性區域的中心和寬度由第2.2節中判別器篩選后被丟棄數據在邊界附近的分布確定:
Lkl={B,sl∈[sk-1l,skl]}
kl=B,sl∈μk-1l-σk-1l2,μkl+σkl2 (7)
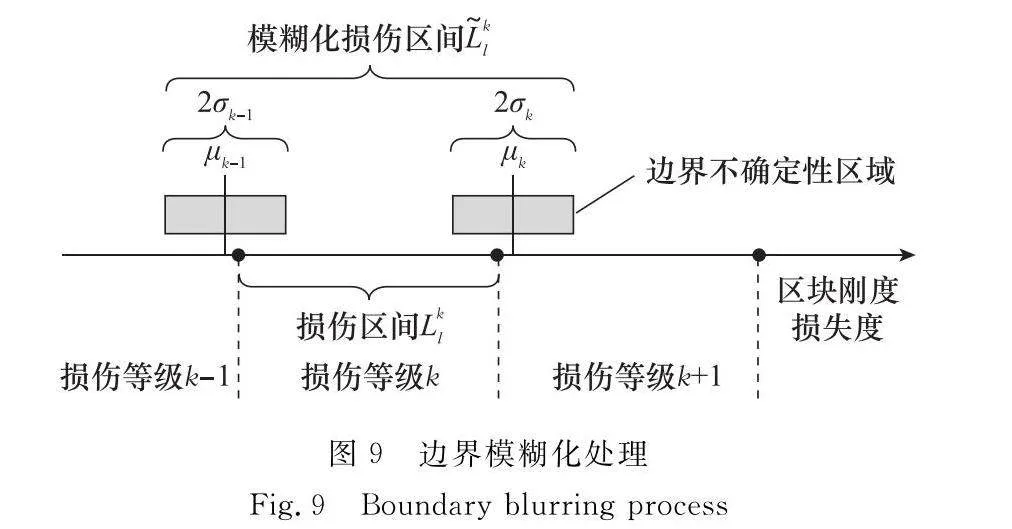
式中:Lkl為第l個損傷區塊的第k個損傷等級;B為損傷向量;sk-1l和skl為該區間內剛度損失度的取值范圍;kl表示邊界模糊化后的損傷等級;μkl和σkl分別為邊界模糊化區域的中值和半寬度,其值分別為第l個損傷區塊的第k個損傷等級右側邊界丟棄數據的均值和方差。圖9為邊界模糊化處理的示意圖,展示了模糊化損傷區間的產生方式。
當一樣本位于模糊化損傷區間kl中時,即使該樣本真值不在原本的損傷區間Lkl中,將樣本損傷等級分類為k也將視為可接受的。
4 無人機案例研究
以某型無人機為例,為本文方法提供驗證案例。第4.1節介紹案例無人機的基本信息和傳感器布置,第4.2節介紹無人機的部件模塊化和損傷等級定義方案,第4.3節介紹了損傷狀態數據庫的建立過程,包括對飛行工況的計算流體力學(computational fluid dynamics, CFD)分析、損傷狀態仿真及樣本合成的精度驗證和增廣損傷狀態數據庫的建立,第4.4節驗證神經網絡識別模型的準確度和邊界模糊化方法對識別穩定性的提升效果。
4.1 無人機物理實體
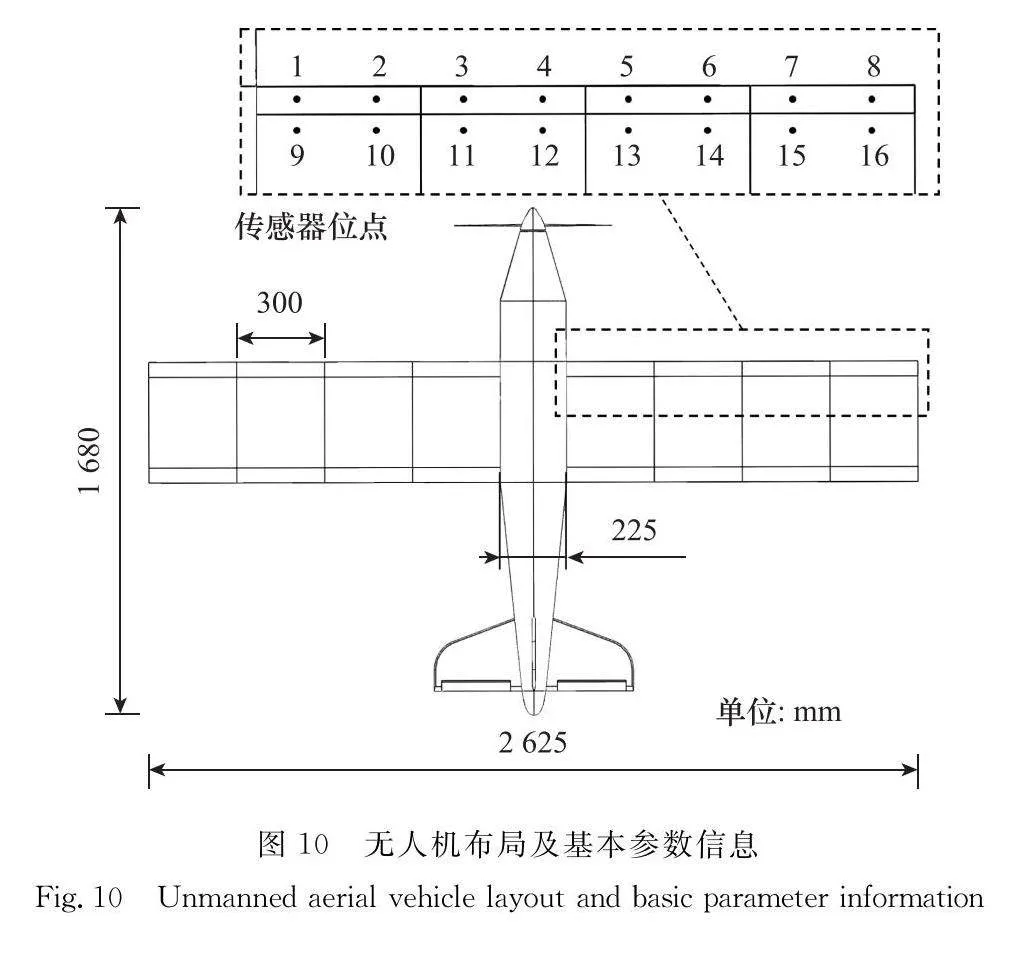
無人機使用電機驅動螺旋槳作為動力,安裝平直矩形機翼,每個機翼有兩個翼梁,沿展向分為4段區域。圖10展示了無人機的基本參數信息和傳感器布置方式。
傳感器安裝在無人機的機翼蒙皮內側,并沿翼梁延申方向均勻分布;因使用區塊剛度縮減表示翼梁結構損傷,翼梁仿真的應變分布和實際會有差別,為了減少其影響則不將傳感器安裝在翼梁上,而是選擇安裝在靠近翼梁的機翼蒙皮表面。圖10中每個黑色圓點表示一個傳感器,每側共安裝有16個應變傳感器。
4.2 結構模塊化建模
該無人機可通過位于機翼蒙皮上的傳感器實現對各主要部件的損傷識別,本案例以機翼前翼梁為對象,驗證方法的應用可行性和識別準確性。
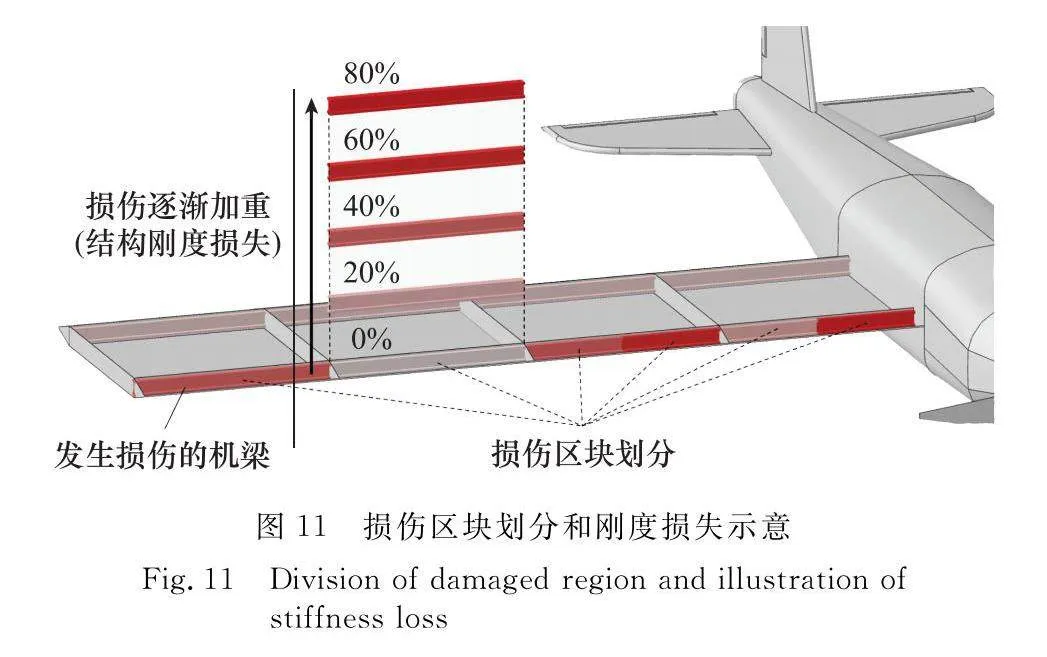
翼梁在翼根處應變較大,沿展向變化快速;在翼梢處應變較小,且沿展向變化平緩。因而翼梁的結構損傷更容易發生在翼根處,且需要的定位準確度更高。基于以上分析,將翼梁結構沿展向切分,區塊數n=6,靠近翼梢一半為每個隔斷設置1個區塊,靠近翼根一半為每個隔斷設置2個區塊。區塊劃分的數學表示為
A={A1,A2,A3…,ANA}
A1={a1,1,a1,2,a1,3,a1,4,a1,5,a1,6}(8)
式中:A1表示機翼前梁;a1,1~a1,6等表示前梁中所劃分的各損傷區塊。區塊劃分方案如圖11所示。
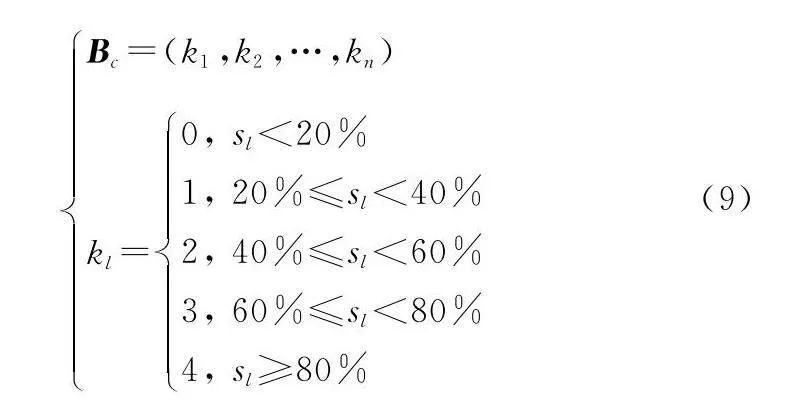
無人機的區塊損傷等級定義為
Bc=(k1,k2,…,kn)
kl=0, sl<20%
1, 20%≤sl<40%
2, 40%≤sl<60%
3, 60%≤sl<80%
4, sl≥80% (9)
式中:kl表示了第l個區塊的損傷等級;每個區塊的損傷等級數Lmax=5。
4.3 損傷狀態數據庫建立
本文通過CFD分析來計算飛行器機翼的氣動載荷,使用結構有限元仿真的方法采樣機翼的損傷狀態。
4.3.1 飛行工況仿真
為計算機翼的載荷,對飛行器在典型工況下進行空氣動力學仿真。
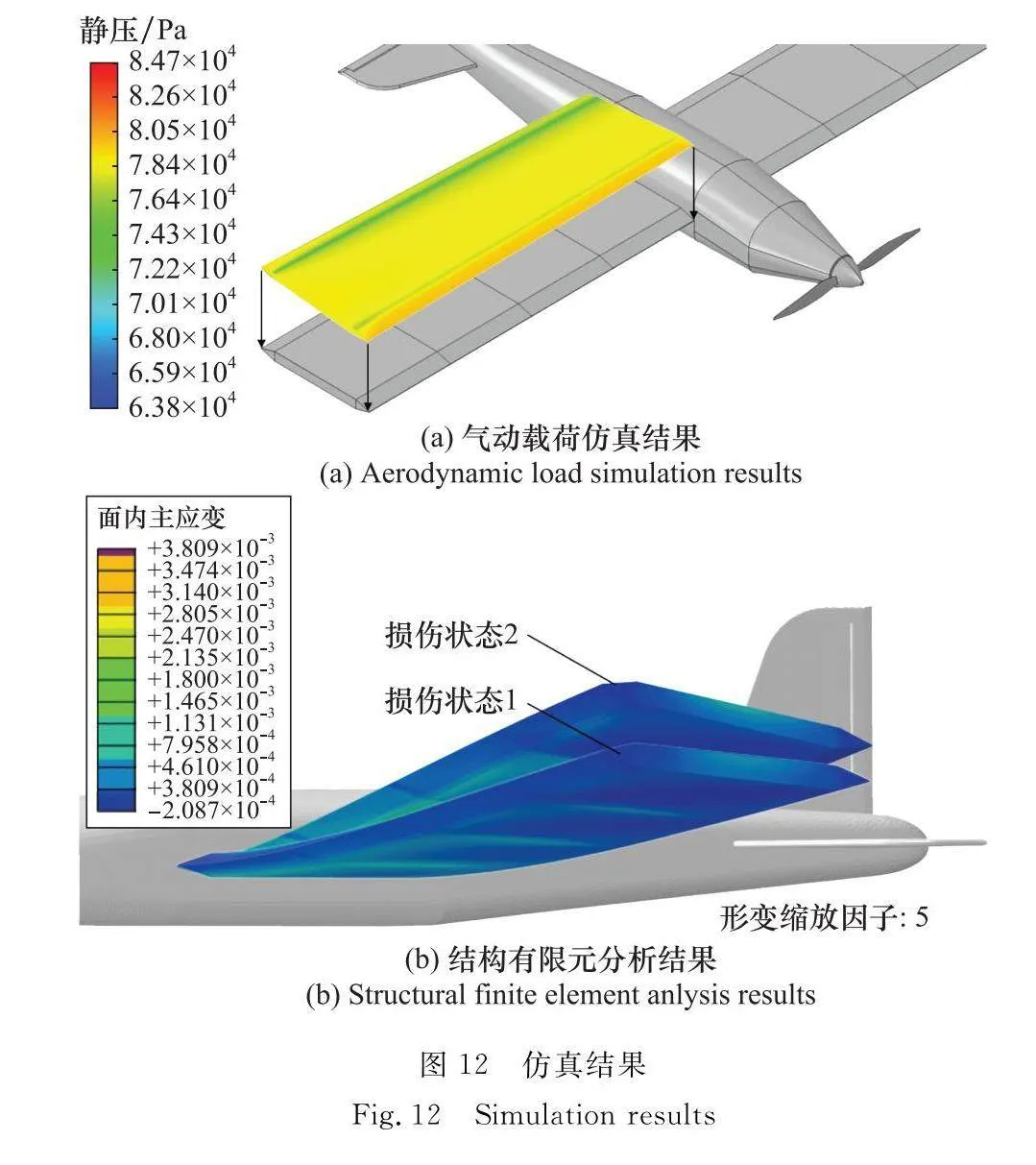
限定飛行器飛行高度為2 000 m,馬赫數為0.3,攻角為4°,建立CFD分析模型。使用Fluent軟件進行氣動仿真計算,再使用單向流固耦合的方式將Fluent氣動載荷加載到Abaqus軟件的結構模型上用于結構有限元分析。仿真的計算結果如圖12所示。
4.3.2 損傷狀態仿真及樣本合成
對Nsim組隨機損傷狀態進行結構有限元仿真,得到每種損傷狀態對應的傳感器數值,作為損傷狀態數據庫的仿真數據部分。使用仿真數據作為設計點,再隨機生成Ngen組區塊剛度縮減值作為插值點(試驗點),應用生成-判別模型進行合成并篩選,得到試驗點損傷狀態對應的傳感器數值,作為增廣損傷狀態數據庫。
驗證數據集和測試數據集均為規模為1 000組隨機損傷狀態及對應的仿真結果。對于本案例,數據點為損傷度向量B(6維),數據點的響應為傳感器觀測向量q(16維)。
4.3.3 增廣數據庫對識別的提升效果
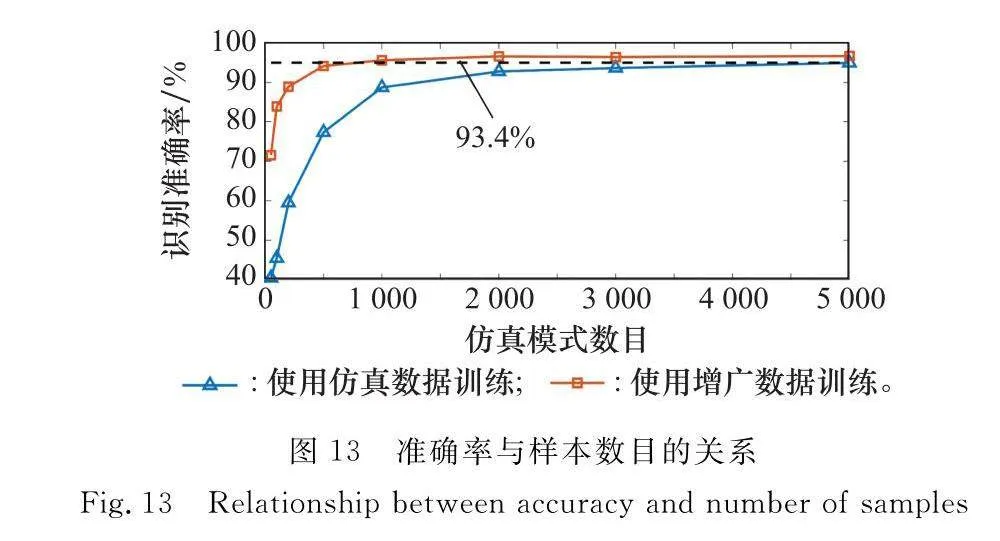
為了測試該合成方法的效果,以最終訓練得到的識別模型對每個區塊的識別準確率的平均值為評判標準,針對不同仿真次數生成相同規模的數據庫,進行識別準確率的對比驗證。
固定篩選后生成數據的規模為10 000個,對比使用不同數量的仿真樣本測試合成對識別準確率的影響。圖13展示了測試結果。圖13中,三角形折線為僅用仿真樣本訓練出的識別模型對測試樣本的識別準確率,正方形折線為使用增廣數據集訓練出的識別模型的準確率。結果表明,使用生成判別模型對仿真損傷狀態數據庫進行合成,對訓練得到的損傷狀態識別模型的準確率實現了顯著的提升。使用5 000個仿真結果作為訓練樣本的訓練效果(識別準確率94.95%),等同于僅使用不到1 000個仿真結果再進行合成后得到的訓練樣本的訓練效果。
4.4 神經網絡損傷狀態識別
4.4.1 神經網絡模型及訓練
選擇神經網絡全連接層層數為4,每層50個神經元。為了降低陷入局部極小值的概率,采用了小批量訓練方法,每個批量的大小為16,訓練的初始步長為0.002,每完成300次迭代后步長乘以0.2,共完成900次迭代后結束訓練。損失函數采用均方根誤差(mean square error, MSE)函數。
4.4.2 應用邊界模糊化方法進行模式識別
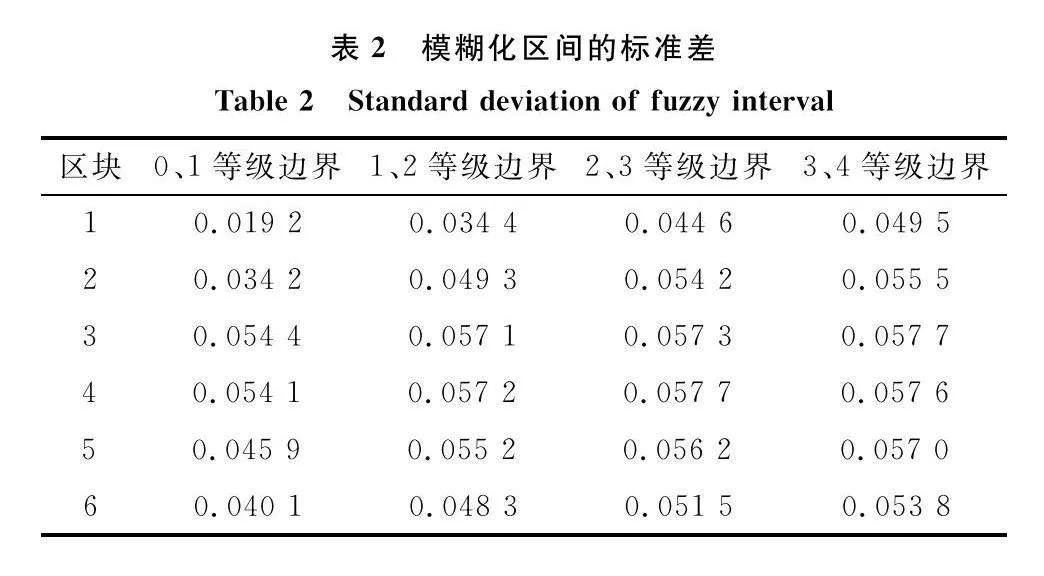
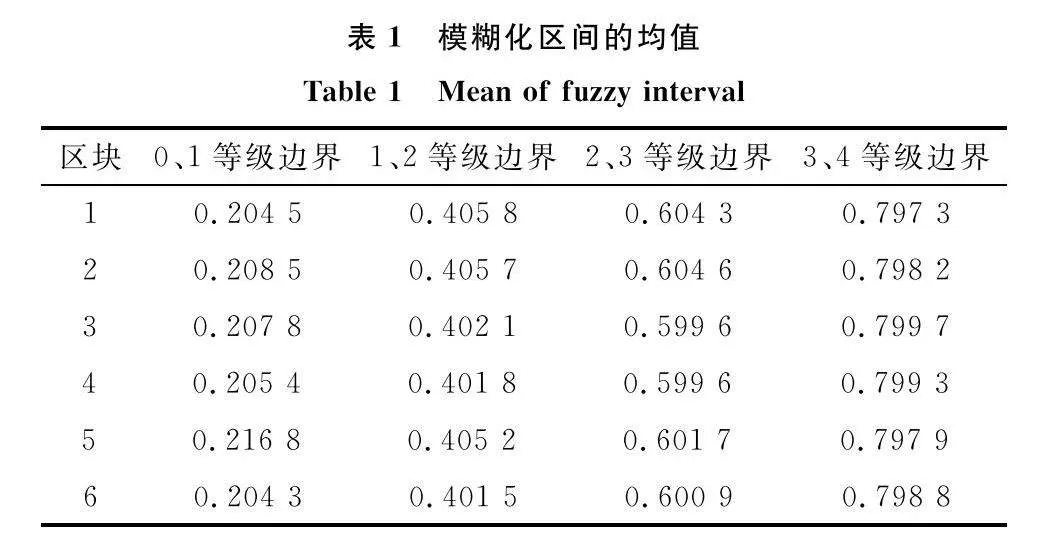
以1 000個仿真樣本數據合成10 000個合成樣本數據點為情形,應用第3.2節中的邊界模糊化方法。首先使用第2.2.2節中的網格搜索法確定判別模型的系數k=[1,2,1,2,1,2],所得到的模糊化區間的均值和標準差如表1和表2所示。
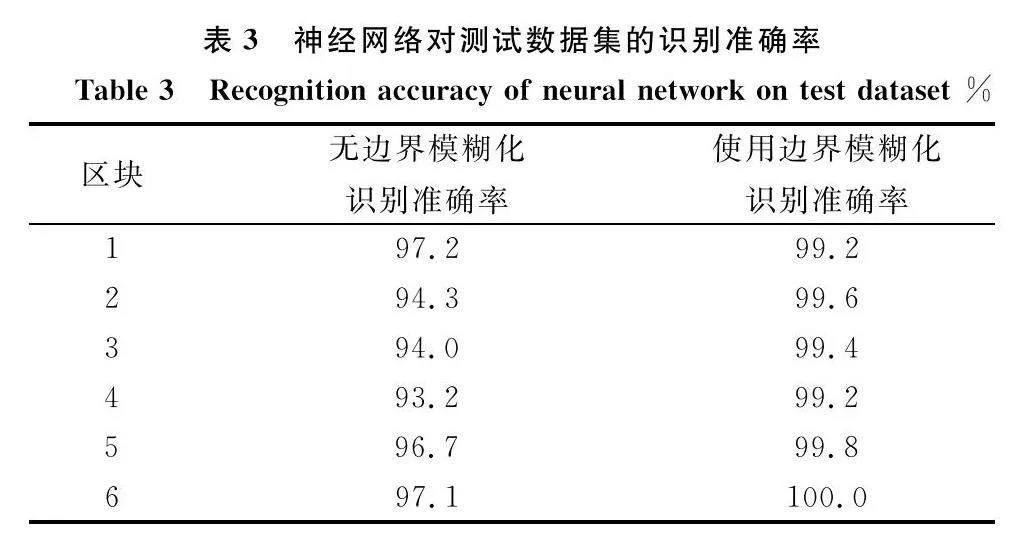
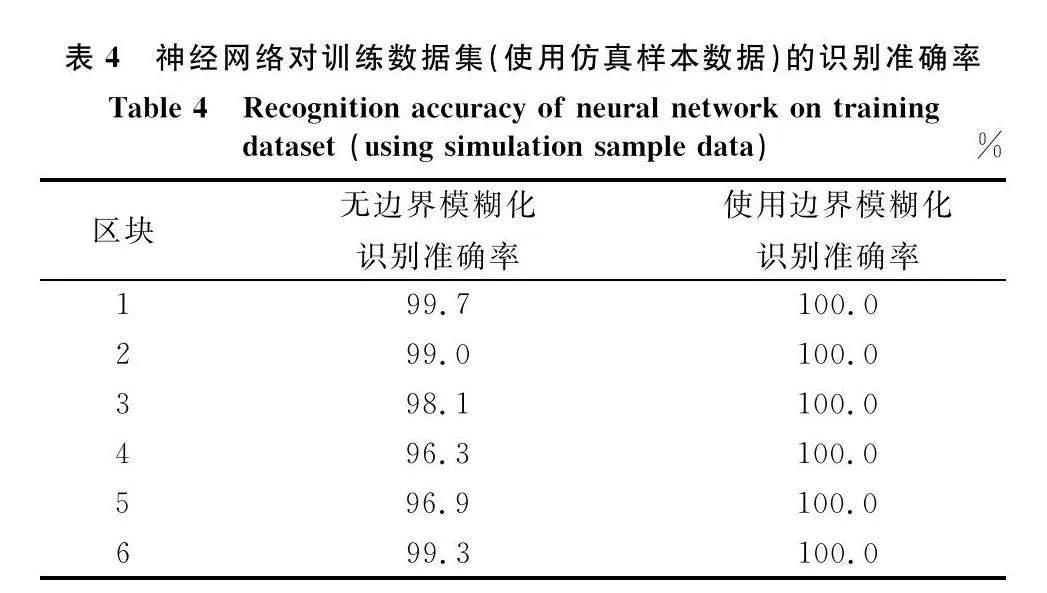
使用增廣數據集訓練并測試神經網絡損傷識別模型,經過實際測試,表3和表4為神經網絡識別準確率的測試結果。
在使用邊界模糊化方法后,神經網絡對測試數據的準確度均在99%以上,且對訓練數據的準確度均達到100%。通過定義模糊化系數對損傷區間進行模糊化操作,可以消除硬性劃分損傷等級帶來的邊界不穩定現象,使分類方式更合理。
5 結束語
本文針對當前飛行器結構損傷狀態識別復雜性高且實時性差的問題,提出一種基于數據驅動的飛行器結構損傷狀態快速識別方法。
(1) 構建一種基于簡單傳感器和數據合成方法的飛行器結構損傷快速識別模型,引入數字孿生思想,以數據合成的方法來解決現有飛行器結構健康檢測硬件系統復雜、實時性較差的問題。
(2) 引入生成-判別模型作為數據合成方法建立增廣損傷狀態數據庫,提出對生成數據的可信度評價指標,對生成數據進行可信度評價并篩選,擴大訓練數據規模,解決小樣本情形下的損傷狀態識別問題。
(3) 提出基于判別模型的邊界模糊化區域確定方法來解決損傷等級硬性劃分帶來的邊界分類不穩定現象,提升識別的穩定性。
通過為一個無人機開發數字孿生模型驗證了以上方法,結果表明:使用本文方法能夠在保證識別準確率的前提下大幅度減少仿真次數,并提升神經網絡的識別能力和穩定性。使用邊界模糊化后對無人機損傷狀態的識別準確率超過99%。對于復雜結構和工況下飛行器結構數字孿生模型的構建和更新依然是需要繼續研究的難點。此外,本文只使用了應變傳感器作為觀測數據來源,對于其他類型或者更多數量的傳感器如何優化布局和選擇還需要進一步研究。
參考文獻
[1]張衛紅, 唐長紅. 航空航天裝備的輕量化: 挑戰與未來[J]. 航空學報, 2024, 45(5): 9-15, 4.
ZHANG W H, TANG C H. Lightweighting of aerospace and aeronautical equipment: challenges and perspectives[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 9-15, 4.
[2]王博, 郝鵬, 田闊, 等. 航空航天結構輕量化設計與實驗方法研究進展[J]. 宇航學報, 2023, 44(4): 596-606.
WANG B, HAO P, TIAN K, et al. Research progress on lightweight design and experimental methods for aerospace structures[J]. Journal of Astronautics, 2023, 44(4): 596-606.
[3]VAN D W T, DENG Q, SANTOS B F. Robust long-term aircraft heavy maintenance check scheduling optimization under uncertainty[J]. Computers amp; Operations Research, 2022, 141: 105667.
[4]YANG Z Y, YANG H J, TIAN T, et al. A review in guided-ultrasonic-wave-based structural health monitoring: from fundamental theory to machine learning techniques[J]. Ultrasonics, 2023, 133: 107014.
[5]FIGUEIREDO E, BROWNJOHN J. Three decades of statistical pattern recognition paradigm for SHM of bridges[J]. Structural Health Monitoring, 2022, 21(6): 3018-3054.
[6]MONTAZERIAN H, RASHIDI A. Integrated sensors in advanced composites: a critical review[J]. Critical Reviews in Solid State and Materials Sciences, 2020, 45(3): 187-238.
[7]JU M, DOU Z, LI J W, et al. Piezoelectric materials and sensors for structural health monitoring: fundamental aspects, current status, and future perspectives[J]. Sensors, 2023, 23(1): 543.
[8]SIMON J, KURIN T, MOLL J, et al. Embedded radar networks for damage detection in wind turbine blades: validation in a full-scale fatigue test[J]. Structural Health Monitoring, 2023, 22(6): 4252-4263.
[9]何存富, 鄭明方, 呂炎, 等. 超聲導波檢測技術的發展、應用與挑戰[J]. 儀器儀表學報, 2016, 37(8): 1713-1735.
HE C F, ZHENG M F, LYU Y, et al. Development, applications and challenges in ultrasonic guided waves testing technology[J]. Chinese Journal of Scientific Instrument, 2016, 37(8): 1713-1735.
[10]REN Y Q, QIU L, YUAN S F, et al. A diagnostic imaging approach for online characterization of multi-impact in aircraft composite structures based on a scanning spatial-wavenumber filter of guided wave[J]. Mechanical Systems and Signal Processing, 2017, 90: 44-63.
[11]REN B Y, LISSENDEN C J. PVDF multielement lamb wave sensor for structural health monitoring[J]. IEEE Trans.on Ultrasonics, Ferroelectrics, and Frequency Control, 2016, 63(1): 178-185.
[12]PAK C G. Wing shape sensing from measured strain[J]. American Institute of Aeronautics and Astronautics, 2016, 54(3): 1068-1077.
[13]杜飛, 徐超, 魚則行. 可重復使用運載器結構健康監測技術研究進展[J]. 宇航學報, 2019, 40(10): 1177-1186.
DU F, XU C, YU Z X. Research progress on structural health monitoring technology for reusable launch vehicles[J]. Journal of Astronautics, 2019, 40(10): 1177-1186.
[14]梁棟, 袁慎芳, 常琦, 等. 基于黑板協作的多區域沖擊監測[J]. 系統工程與電子技術, 2011, 33(3): 700-706.
LIANG D, YUAN S F, CHANG Q, et al. Multi-region impact monitoring based on blackboard coordination[J]. Systems Engineering and Electronics, 2011, 33(3): 700-706.
[15]ERIC U. Fiber optic smart structures[J]. Proceedings of the IEEE, 1996, 84(6): 884-894.
[16]李鵬, 潘凱, 劉小川. 美國空軍機體數字孿生計 劃的回顧與啟示[J]. 航空科學技術, 2020, 31(9): 1-10.
LI P, PAN K, LIU X C. Retrospect and enlightenment of the AFRL airframe digital twin program[J]. Aeronautical Science amp; Technology, 2020, 31(9): 1-10.
[17]LI L N, SOHAIB A, ANDREW W, et al. Digital twin in aerospace industry: a gentle introduction[J]. IEEE Access, 2021, 10: 9543-9562.
[18]TAO F, XIAO B, QI Q L, et al. Digital twin modeling[J]. Journal of Manufacturing Systems, 2022, 64: 372-389.
[19]DANG H V, TATIPAMULA M, NGUYEN H X. Cloud-based digital twinning for structural health monitoring using deep learning[J]. IEEE Trans.on Industrial Informatics, 2021, 18(6): 3820-3830.
[20]YE Y M, YANG Q A, YANG F, et al. Digital twin for the structural health management of reusable spacecraft: a case study[J]. Engineering Fracture Mechanics, 2020, 234: 107076.
[21]KAPTEYN M G, KNEZEVIC D J, HUYNH D B P, et al. Data-driven physics-based digital twins via a library of component-based reduced-order models[J]. International Journal for Numerical Methods in Engineering, 2022, 123(13): 2986-3003.
[22]王子一, 粟華, 龔春林, 等. 數字孿生機翼損傷模式快速識別與監測方法[J]. 航空動力學報, 2024, 39(6): 112-120.
WANG Z Y, SU H, GONG C L, et al. Rapid identification and monitors of digital twin wings damage patterns[J]. Journal of Aerospace Power, 2024, 39(6): 112-120.
[23]WANG J Y, LIU K X, ZHANG Y C, et al. Recent advances of few-shot learning methods and applications[J]. Science China Technological Sciences, 2023, 66(4): 920-944.
[24]劉建偉, 劉媛, 羅雄麟. 半監督學習方法[J]. 計算機學報, 2015, 38(8): 1592-1617.
LIU J W, LIU Y, LUO X L. Semi-supervised learning methods[J]. Chinese Journal of Computers, 2015, 38(8): 1592-1617.
[25]RAMIREZ-SANZ J M, MAESTRO- PRIETO J A, ARNAIZ-GONZALEZ A, et al. Semi-supervised learning for industrial fault detection and diagnosis: a systemic review[J]. ISA Transactions, 2023, 143: 255-270.
[26]LIU B, WANG X D, DIXIT M, et al. Feature space transfer for data augmentation[C]∥Proc.of the IEEE Conference on Computer Vision and Pattern Recognition, 2018: 9090-9098.
[27]王鈺清, 陸文凱, 劉金林, 等. 基于數據增廣和CNN的地震隨機噪聲壓制[J]. 地球物理學報, 2019, 62(1): 421-433.
WANG Y Q, LU W K, LIU J L, et al. Random seismic noise attenuation based on data augmentation and CNN[J]. Chinese Journal of Geophysics, 2019, 62(1): 421-433.
[28]GOODFELLOW I, POUGET-ABADIE J, MIRZA M, et al. Generative adversarial nets[C]∥Proc.of the Advances in Neural Information Processing Systems, 2014: 2672-2680.
[29]JIANG Y F, CHANG S Y, WANG Z Y. TransGAN: two pure transformers can make one strong GAN, and that can scale up[C]∥Proc.of the Advances in Neural Information Processing Systems, 2021: 14745-14758.
[30]王鵬, 楊妹, 祝建成, 等. 面向數字孿生的動態數據驅動建模與仿真方法[J]. 系統工程與電子技術, 2020, 42(12): 2779-2786.
WANG P, YANG M, ZHU J C, et al. Dynamic data driven modeling and simulation method for digital twin[J]. Systems Engineering and Electronics, 2020, 42(12): 2779-2786.
[31]方偉光, 聶兆偉, 劉宸寧, 等. 數字孿生驅動的武器裝備智能保障技術研究[J]. 系統工程與電子技術, 2023, 45(4): 1247-1260.
FANG W G, NIE Z W, LIU C N, et al. Research on digital twin driven intelligent weaponry support technology[J]. Systems Engineering and Electronics, 2023, 45(4): 1247-1260.
[32]韓忠華. Kriging模型及代理優化算法研究進展[J]. 航空學報, 2016, 37(11): 3197-3225.
HAN Z H. Kriging surrogate model and its application to design optimization: a review of recent progress[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(11): 3197-3225.
[33]ALTMAN N S. An introduction to kernel and nearest-neighbor nonparametric regression[J]. The American Statistician, 1992, 46(3): 175-185.
作者簡介
王浩淵(2000—),男,碩士研究生,主要研究方向為飛行器結構健康檢測。
粟 華(1985—),男,副研究員,博士,主要研究方向為飛行器總體設計、數字孿生飛行器設計、多學科設計優化應用。
李 鵬(1984—),男,高級工程師,碩士,主要研究方向為飛行器總體設計。
龔春林(1980—),男,教授,博士,主要研究方向為飛行器設計理論、方法和應用。
