無人機邊緣計算:架構、多址接入與計算卸載
2024-11-27 00:00:00劉鵬濤雷菁劉偉
系統工程與電子技術 2024年9期

摘 要:
無人機(unmanned aerial vehicle, UAV)邊緣計算技術將UAV平臺與移動邊緣計算技術相結合,充分利用UAV的靈活性和機動性,為用戶設備提供及時有效的計算服務。從UAV邊緣計算的網絡架構入手,提出基于網絡功能虛擬化和軟件定義網絡的技術架構。針對UAV邊緣計算的關鍵技術,總結對比UAV邊緣計算中不同的多址接入方案,并從不同的優化目標出發,對基于經典非凸優化、博弈論以及人工智能方法的計算卸載策略進行總結和分析。最后,探討和展望未來的研究方向。
關鍵詞:
無人機; 移動邊緣計算; 網絡架構; 多址接入; 計算卸載
中圖分類號:
TN 92
文獻標志碼: A""" DOI:10.12305/j.issn.1001-506X.2024.09.31
Unmanned aerial vehicle-enabled edge computing: architecture, multiple access and computation offloading
LIU Pengtao, LEI Jing*, LIU Wei
(College of Electronic Science and Technology, National University of Defense
Technology, Changsha 410073, China)
Abstract:
Unmanned aerial vehicle (UAV)-enabled edge computing combines mobile edge computing technology with UAV platform. It can provide timely and effective computing services for wireless devices by taking advantages of the flexible deployment and mobility of UAV. Starting with the network architecture of UAV-enabled edge computing, the technical architecture based on network function virtualization and software-defined networks is proposed. For the key technologies of UAV-enabled edge computing, different multiple access schemes in UAV-enabled edge computing network are compared. Furthermore, according to different optimization objectives, the computation offloading strategies based on classical non-convex optimization, game theory, and artificial intelligence are summarized and analyzed. Finally, the future research direction is discussed and prospected.
Keywords:
unmanned aerial vehicle (UAV); mobile edge computing; network architecture; multiple access; computation offloading
0 引 言
近年來,無人機(unmanned aerial vehicle, UAV)通信系統的發展呈現出迅猛的勢頭。這一技術領域的突飛猛進不僅推動了UAV行業的快速發展,也為各個領域帶來了新的可能性和前景。首先,UAV通信系統在軍事領域發揮著越來越重要的作用。軍事部隊利用UAV進行偵察、監視、目標定位等任務,而這些任務的成功執行離不開高效可靠的通信系統。其次,在商業領域,UAV通信系統的迅速發展也催生了諸多應用。從快遞配送到農業植保,UAV在商業運營中的應用場景日益豐富。隨著消費級UAV市場的不斷擴大,普通消費者對UAV通信系統的需求也與日俱增。在娛樂、攝影等領域,UAV已經成為了常見的工具,而其通信系統的穩定性、傳輸速度等方面的提升,將進一步滿足用戶對于UAV功能和性能的需求。UAV通信系統的發展不僅僅受益于UAV本身技術的進步,同時也離不開通信技術的創新。隨著5G、物聯網、邊緣計算等新一代通信技術的不斷成熟[1],UAV通信系統的性能將得到極大的提升,從而為UAV的廣泛應用打下更加堅實的基礎。
另一方面,隨著信息技術的快速發展,終端設備的數量不斷增加。移動互聯網服務的爆炸式增長催生了各種需要大量計算的應用程序,如虛擬現實、增強現實、自動駕駛、人工智能、數據分析等應用。終端的計算任務對時延要求越來越高,這給計算能力有限的終端用戶帶來了沉重的計算負擔,算力資源受限與低時延要求的矛盾越來越突出。現有的云計算面臨著核心網傳輸時延過長的問題,無法及時滿足終端設備數據流量爆炸式增長的計算處理需求。而移動邊緣計算(mobile edge computing, MEC)[2]可以將云端的計算資源下沉到網絡邊緣,減少核心網帶寬占用,為終端用戶提供及時有效的計算服務,降低任務計算時間。傳統的MEC系統通常將MEC服務器部署于基站、接入點等網絡邊緣位置。由于其固定的架構,存在靈活性差、部署成本高的問題。然而,未來的網絡不僅需要能夠適應動態和異構的環境,還應該能夠以快速和高可靠的方式支持熱點區域和臨時的任務計算。最近研究表明,MEC服務器也可以搭載于UAV[3]。Axellio公司針對UAV開發出了一款輕量級邊緣計算平臺FabricXpress[4]。
相較于傳統的地面MEC網絡,UAV輔助的MEC(UAV-MEC)網絡有以下優勢:① UAV可以在荒野、沙漠、受災地域、軍事行動等多數情況下靈活部署。② UAV能夠與地面用戶、基站建立視距鏈路(line of sight, LoS)[5],從而擴大服務覆蓋范圍、提高數據傳輸的穩定性和可靠性,并有助于提高計算性能。③ UAV的移動性能夠適應用戶設備數量、位置和服務需求的不斷變化,從而為移動用戶提供無縫計算服務,保證計算服務的連續性,并可為其他計算資源受限的UAV提供支持。此外,在UAV進行搜索和救援時,處理圖像所需的計算能力和存儲能力較強,以人臉識別為代表的任務需求需要實時上傳視頻并進行決策。對于計算能力有限的UAV,可以將這些計算密集型任務轉移至MEC服務器、空閑的UAV、地面基站或接入點。
目前,已經有一些關于UAV和邊緣計算的相關研究綜述文章。在UAV的綜述中,文獻[6]對UAV網絡中多種接入技術進行全面的總結與對比。文獻[7]回顧非正交多址接入(non-orthogonal multiple access, NOMA)在UAV網絡中的應用。在邊緣計算的綜述中,文獻[8]提出MEC技術的實現依賴于網絡功能虛擬化(network function virtualization, NFV)和軟件定義網絡(software defined network, SDN),并將虛擬化的資源通過虛擬功能網元(virtual network function, VNF)執行。文獻[9]針對MEC中的計算卸載方案進行分析總結。在UAV-MEC網絡的綜述中,文獻[10]簡要介紹UAV-MEC網絡的體系架構、任務卸載的工作原理、計算卸載時采用的不同接入方案。文獻[11]提出一種融合UAV和邊緣計算的網絡架構,并簡單分析總結多用戶接入技術與計算卸載策略。文獻[12]探索一種基于SDN的UAV-MEC框架。文獻[13]對UAV-MEC網絡的資源優化問題進行綜述,提出基于軟件定義UAV網絡的總體架構。文獻[14]中簡要概述UAV搭載MEC設備的基本網絡架構,重點對現有的卸載算法進行了調查和分析對比。文獻[15]總結多UAV-MEC網絡中多址接入與計算卸載決策。文獻[16]總結利用智能方法解決UAV-MEC網絡中以最小化能耗、最小化時延、最大化任務處理數為目標的資源優化問題。限于篇幅和側重點,上述綜述文章只是簡單地介紹UAV-MEC網絡中的技術架構和多用戶接入方案。本文的創新之處在于針對UAV-MEC網絡的技術架構進行詳細的介紹,從多用戶接入的角度出發,詳細對比多種接入方案,并分析其對計算卸載時延與能耗性能的影響,給出多種最新的計算卸載策略。通過詳細描述UAV-MEC網絡的技術架構,更好地了解該網絡的組成部分。通過對比不同的接入方案,綜述給出對計算卸載性能的影響,為讀者提供了深入分析、選擇接入方案和計算卸載策略的依據。本文首先總結UAV-MEC網絡的技術架構以及應用場景,然后從多址接入方案、計算卸載策略這兩方面介紹和分析網絡中的關鍵技術,最后將會探討未來的挑戰以及發展方向。
1 UAV-MEC架構與應用場景
本節將搭建UAV-MEC網絡的技術架構,并介紹UAV-MEC網絡的實際應用場景。
1.1 UAV-MEC技術架構
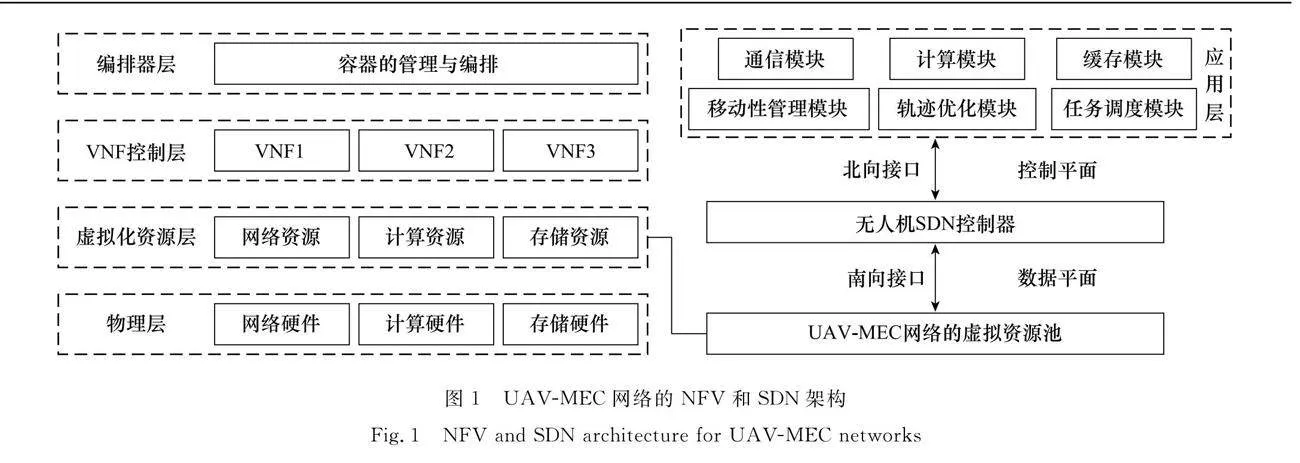
根據前文所述,MEC技術的實現依賴于NFV和SDN。然而,由于UAV自身體積小且高速移動,將邊緣計算平臺搭載于UAV面臨著一定的挑戰。因此,本節將結合NFV和SDN的特點,將其引入UAV網絡中,搭建適應UAV-MEC網絡的技術架構。以NFV和SDN這兩個關鍵技術為支撐UAV搭載輕量級移動計算平臺、實現任務計算功能,為UAV-MEC網絡從理論到實踐起了重要的推動作用。通過NFV,可以使得MEC服務器根據計算任務的需求變化動態調整提供的計算資源,方便實現多UAV之間的通信、計算資源的高效共享。通過SDN,可以實現控制平面與數據平面的分離,方便獲取區域內各個終端用戶的狀態以及動態變化情況,實現計算任務的有效分配。適應UAV-MEC網絡技術架構如圖1所示。
1.1.1 UAV-MEC網絡功能虛擬化
NFV技術實現了硬件和軟件應用程序的隔離,使用戶能夠在硬件上運行由多個虛擬機組成的仿真環境,并通過訪問物理資源進行操作。物理層由計算硬件、存儲硬件和網絡硬件組成。通過將硬件映射為虛擬化格式,可以更加方便地訪問和管理計算資源。將NFV技術引入UAV-MEC網絡,可以將UAV中配備的MEC服務器的硬件資源抽象為虛擬化的計算資源,形成包括虛擬計算、虛擬存儲和虛擬節點的虛擬化層,并將請求的資源提供給VNF執行。
利用NFV技術,配備MEC服務器的UAV可以通過創建多個虛擬機或輕量級的容器,實現有效的計算資源虛擬化分割,為多個終端設備的不同類型任務提供計算服務。文獻[17]提出了通過NFV技術,優化UAV的部署和飛行控制,確保UAV提供服務的可靠性和用戶服務質量(quality of service, QoS)需求。借鑒文獻[11-12]的思想,本文提出UAV-MEC網絡可以虛擬化為物理層、虛擬化資源層、VNF控制層和編排器層。物理層是機載的MEC服務器網絡、計算、存儲平臺。虛擬化資源層將硬件平臺資源抽象為虛擬化的資源。VNF控制層是通過VNF進行虛擬化計算、存儲資源的管理與調度。編排器層是對虛擬化的容器進行編排,使之能夠順利地接收終端設備的計算任務,并及時調整計算資源的分配。
1.1.2 UAV-MEC SDN
SDN的核心思想是將控制平面與數據平面分離,使得控制平面負責上層的控制決策,而數據平面負責數據的接收與轉發。通過開放式的可編程接口,可以實現多控制器以及多實體設備的通信。將SDN引入UAV-MEC網絡能夠有效降低UAV的負載,簡化UAV-MEC網絡的結構。
通過SDN,能夠有效地管理網絡資源,降低UAV負載,實現對UAV節點進行集中控制。根據文獻[12]所述,UAV集群中的通信、計算和存儲資源通過NFV虛擬成UAV-MEC網絡的資源池。SDN的南向接口負責與數據平面(即虛擬的資源池)進行通信,為SDN控制器收集關于系統整體狀態信息,包括計算任務、UAV和MEC服務器之間的通信和計算資源。SDN控制器部署于UAV集群的簇頭位置,負責管理整體的資源分配、任務卸載、軌跡規劃等功能。SDN的北向接口負責與應用平面(即資源池的分配,UAV動作)進行通信,分發控制指令。應用平面執行相應的動作。在UAV-MEC網絡中,SDN控制器可劃分為通信模塊、計算模塊、緩存模塊、移動性管理模塊、軌跡優化模塊和任務調度模塊。
(1) 通信模塊:負責地面終端設備、基站、地面控制器與UAV的通信,或UAV集群之間的通信,以及通信資源(頻帶,干擾管理,功率)的分配與調度。
(2) 計算模塊:利用輕量化的MEC平臺,滿足UAV自身或其他用戶終端的圖像處理、目標識別等任務的計算能力,以及負責任務卸載決策的執行。
(3) 緩存模塊:利用經典優化算法、強化學習等方法,對區域用戶的內容的流行度進行判斷,并執行緩存決策,更新緩存文件。
(4) 移動性管理模塊:當用戶設備以及UAV動態移動時,終端設備可能會離開UAV的服務范圍,通過移動性管理模塊,可以提前將任務或計算結果交給其他UAV,保證流暢的任務卸載服務。
(5) 軌跡規劃模塊:UAV執行任務時,根據多個終端的計算請求以及UAV集群中其他UAV的位置,規劃飛行軌跡,并執行優化的軌跡策略。
(6) 任務調度模塊:當UAV能源不足或配備的MEC計算資源不足時,可以通過任務調度模塊,將部分任務卸載到MEC服務器空閑的地面基站或UAV。
1.2 UAV-MEC應用場景
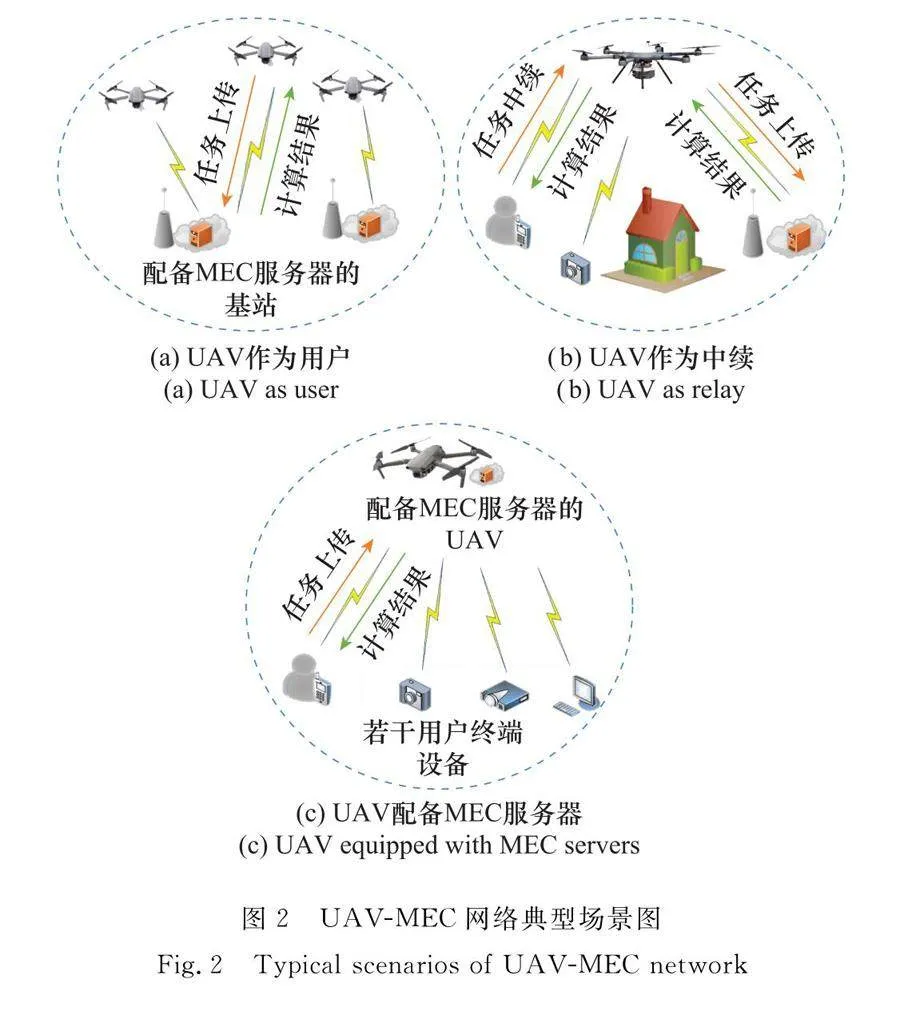
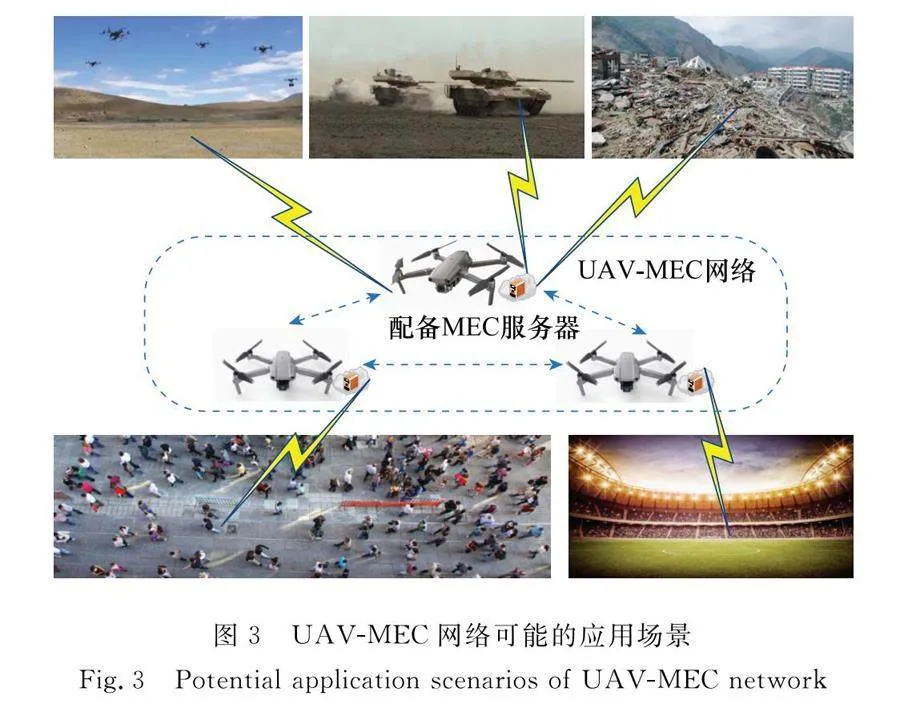
在UAV-MEC網絡中,UAV可以被視為攜帶計算任務的用戶、協助用戶卸載計算任務的中繼以及執行計算任務的MEC服務器。圖2展示了UAV在UAV-MEC網絡中的典型交互場景。UAV-MEC的應用場景有偏遠地區、戰場偵察、緊急救援、智能人群監控、城市熱點保障等,如圖3所示。其中,前3個應用場景是不適合建立地面MEC網絡或地面MEC網絡遭到破壞的情況。此時,UAV-MEC網絡成為了一種理想的替代方案。而后2個應用場景中,UAV-MEC網絡相比地面MEC網絡有更大的優勢,可以通過兩者的協同提供更優質的計算保障服務。
(1) 偏遠地區。在荒野、沙漠、森林、火山和其他復雜地形等偏遠地區情況下,建立地面MEC網絡難度較大并且性價比低。在這些地方,UAV會執行例如動物追蹤、植被樹冠分析、火山探測、核輻射評估等任務。部分數據由UAV的攝像機收集得到,另一部分數據則是由位于這些區域的傳感器傳輸到UAV獲得的。通過UAV-MEC網絡,可以及時處理收集到的數據,生成準確的實時結果信息。
(2) 戰場偵察。在戰場上,短時會有大量時延敏感型任務請求,例如需要實時準確估計對方勢力的位置,對目標進行識別。使用搭載MEC服務器的UAV集群,可以直接將收集到的圖像、截獲的通信信號,在MEC平臺進行處理,迅速得到結果,并反饋到相關服務請求的用戶設備。
(3) 緊急救援。在遇到自然災害如洪水地震時,地面MEC網絡可能被破壞。利用配備紅外攝像頭的UAV集群進行緊急救援時,可以通過識別體溫或圖像營救幸存者,此時需要及時處理圖像識別、人臉識別等任務。在這種情況下,首先需要對圖像進行增強、處理,然后應用計算密集型的計算機視覺算法。相比傳輸到云端,利用UAV-MEC網絡可以大大降低時間。
(4) 智能人群監控。UAV-MEC網絡可以用于基于人臉識別的人群監控,在大量人群中識別出指定的可疑分子。在城市繁華的中心區域,通過對大量監控攝像頭或UAV的圖像處理,識別罪犯和發現任何其他可疑的人類活動,保護人群安全。文獻[18]開發基于UAV-MEC網絡人群監控的實物平臺,實驗表明該平臺可以降低能耗并顯著提高系統響應能力。
(5) 城市熱點保障。在熱點地區,如體育場比賽或露天音樂節,大量觀眾可能有興趣錄制、上傳、共享或下載高質量的視頻。在這些情況下,可能會有眾多的用戶設備同時請求計算密集型服務。UAV-MEC網絡可以靈活部署并協助地面的MEC網絡,提供計算和內容緩存服務,提高用戶服務質量。
2 關鍵技術與進展
UAV-MEC網絡,使得終端用戶設備能夠將其計算任務卸載到配備MEC服務器的UAV進行處理,這為應對任務及時處理提供了一種有效的解決方案。在UAV-MEC網絡需要通過無線鏈路進行終端用戶和UAV之間的數據傳輸。相比地面傳輸,UAV在空中覆蓋范圍更大,需要服務的用戶數更多。在實時救災或戰場偵察時,海量的用戶設備同時接入UAV,對UAV-MEC網絡造成了巨大的壓力,因此相比地面的MEC網絡,UAV與地面設備之間需要更具有魯棒性、支持大并發數的多址接入方案。并且,UAV-MEC網絡需要支持高效的計算卸載,UAV負載和電池受限,如何在飛行過程針對最小化任務完成時間、系統能耗以及權衡時延能耗的優化目標制定計算卸載策略合理地服務設備,也是學術界關注的重點。下面以多址接入技術和計算卸載策略為代表分析研究現狀。
2.1 多址接入技術
多址接入技術可以分為正交多址接入(orthogonal multiple access, OMA)和NOMA。下面將分別介紹OMA和NOMA接入方案下的UAV-MEC系統。
2.1.1 OMA
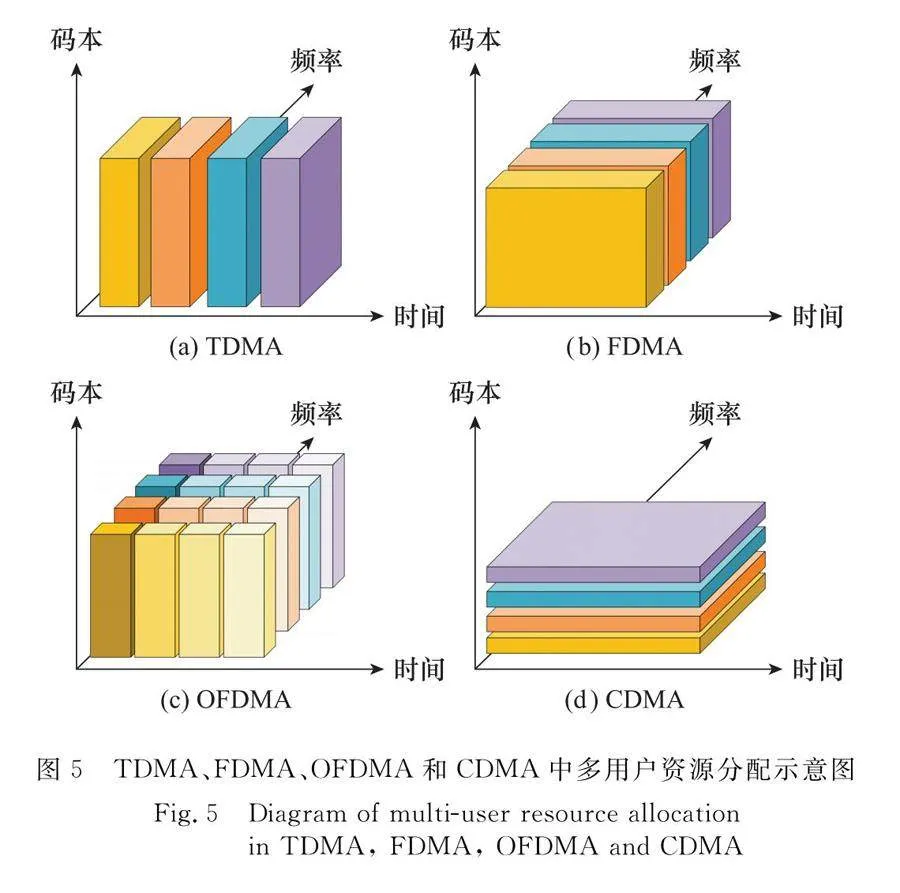
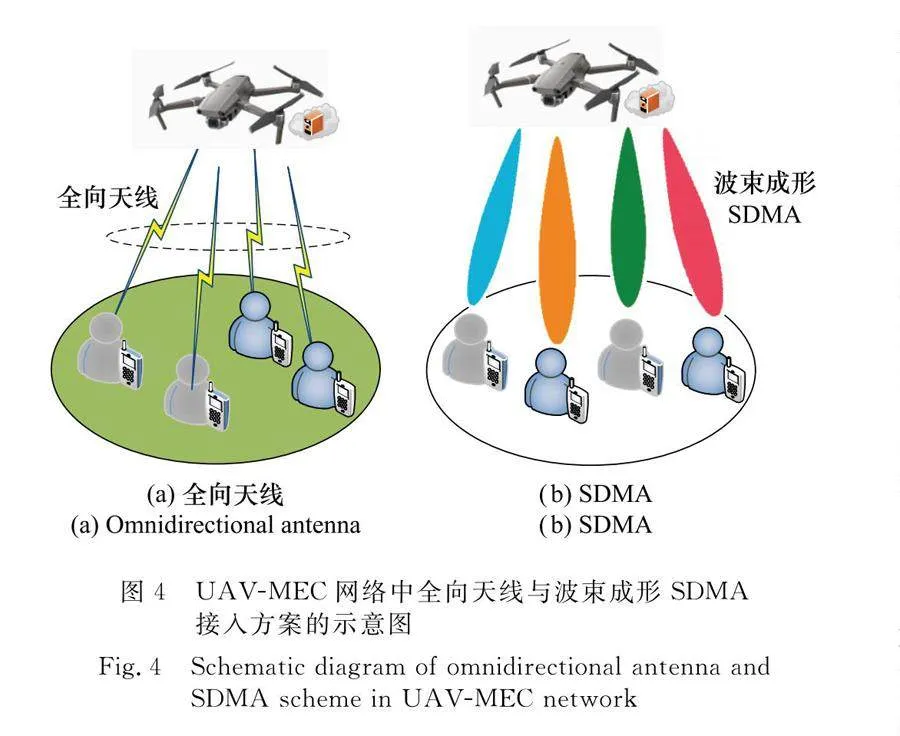
在傳統的UAV和邊緣計算網絡[6]中通常采用OMA方式,包括時分多址(time division multiple access, TDMA),頻分多址(frequency division multiple access, FDMA),正交FDMA(orthogonal FDMA, OFDMA),碼分多址(code division multiple access, CDMA)和空分多址(space division multiple access, SDMA)。在TDMA中,不同的時隙被分配給與UAV通信的不同用戶。在FDMA和OFDMA中,不同的頻帶或正交的子載波被分配給用戶[19],而在CDMA中,不同的設備有不同的正交碼。在SDMA中,使用波束成形對用戶組進行空間分離,為每個組提供全時間或頻率資源。圖4為UAV-MEC網絡中全向天線與SDMA的示意圖,其中UAV采用全向天線與多設備進行通信時,會在其他資源域進行多用戶的區分,具體如圖5所示。
文獻[20]研究一種基于UAV的MEC系統,為了提高UAV的能效,提出一種基于TDMA接入方案的工作排隊模型,該模型允許UAV-MEC系統中不同用戶設備的并行傳輸和執行任務;利用塊坐標下降(block coordinate descent, BCD)法、拉格朗日對偶算法和流水作業排序算法,聯合優化UAV飛行節點關聯、計算資源分配、UAV懸停時間、無線供電時間和UAV飛行節點服務順序,實現UAV總能耗的最小化。文獻[21]從物理層安全的角度研究基于TDMA方案的UAV-MEC系統,為了解決多變量高度耦合的非凸問題,采用BCD算法對UAV的軌跡和計算資源進行聯合優化,優化TDMA方案最小安全計算能力最大化的問題。
在UAV-MEC系統中在以強視距路徑為主、頻率選擇性小的空對地信道時更適合FDMA接入方案[22]。文獻[23]研究UAV與基站協同為物聯網設備提供MEC服務,在任務卸載過程中,使用FDMA方案以帶寬區分多用戶設備;通過聯合優化UAV的位置、通信和計算資源分配,以及任務卸載決策,利用連續凸近似(sucessive convex approximation,SCA)算法求解一個以所有物聯網設備業務時延和UAV能耗加權之和最小為目標的優化問題。文獻[24]考慮具備時間敏感性任務的設備需求,研究基于FDMA的UAV-MEC網絡,該網絡由多UAV為用戶設備提供協同卸載服務;利用BCD和交替迭代算法,對UAV的飛行軌跡、資源分配和卸載決策進行聯合優化,使系統總能耗最小。
文獻[25]研究OFDMA接入方案下UAV-MEC系統中的延遲感知調度問題,通過對時分雙工(time division duplex, TDD)和頻分雙工(frequency division duplex, FDD)兩種模式的研究,提出基于對偶理論的備選搜索優化和SCA的算法,解決基于下行傳輸功率和子載波分配的資源分配問題,該算法可以快速收斂并具有較小的計算復雜度。文獻[26]討論OFDMA框架下MEC網絡中計算效率加權和最大化問題,并推導最優子信道和功率分配方案的閉式表達式。文獻[27]研究地面MEC服務器和UAV-MEC網絡協同工作,地面用戶在保證最小計算量的情況下,將剩余的任務分配給地面服務器和基于OFDMA方案的UAV服務器,通過優化用戶設備占用OFDMA方案的正交頻帶以及發射功率使得設備與UAV之間傳輸速率的最大化。
針對UAV群實時空中監視網絡對距離和吞吐量的需求,文獻[28]將CDMA方案引入IEEE 802.11ah標準,以適應UAV群體通信場景下的多個用戶設備多路訪問,從而為傳輸視頻和其他有效載荷信息提供不同數據速率的多用戶通信能力。文獻[29]研究基于CDMA接入方案的UAV-MEC系統,設備通過CDMA接入UAV的MEC服務器,不同的正交碼允許多個用戶同時有效地共享頻譜資源;在卸載決策和資源競爭的約束下,提出一個基于博弈論的方案最小化時間延遲和能量消耗的加權和并證明了納什均衡的存在性。
文獻[30]中建立基于SDMA接入的UAV-MEC網絡的聯合通信計算優化模型以及實物平臺,該模型包括具有MEC能力的集中式頂部UAV(top UAV, T-UAV)和分布式底部UAV群(bottom UAV, B-UAV)。對于負載和飛行能力更強的固定翼T-UAV,可以部署多個相控陣天線并發產生不同波束,以支持SDMA通信。在每個相控子陣天線面板上集成多個射頻集成電路,確保接收T-UAV的主瓣束指向每個發射機B-UAV的方向。針對毫米波束狀波束的特點,利用基于全球定位系統等位置感知技術和UAV攝像機圖像處理技術的空間正交技術,實現多架B-UAV以獨立波束訪問T-UAV的目標。利用隨機幾何方法,推導基于UAV群三維分布的單個鏈路和一組鏈路的成功傳輸概率,并利用排隊理論,得到最優響應延遲。
2.1.2 NOMA
傳統的OMA方式保證了多設備并發通信之間的正交性,以避免用戶之間的干擾[31]。然而,這種正交設計會受到服務用戶數量的限制,降低了系統的頻譜效率,不能滿足設備大量接入與高頻譜利用率。用戶設備有時需要等待一個可用的正交資源塊來被授予訪問權,這對于計算任務時延要求嚴格的用戶是不可接受的。而NOMA可以通過劃分發射功率或碼本,使用相同的時隙和頻率資源容納更多的用戶與搭載MEC服務器的UAV通信[32]。
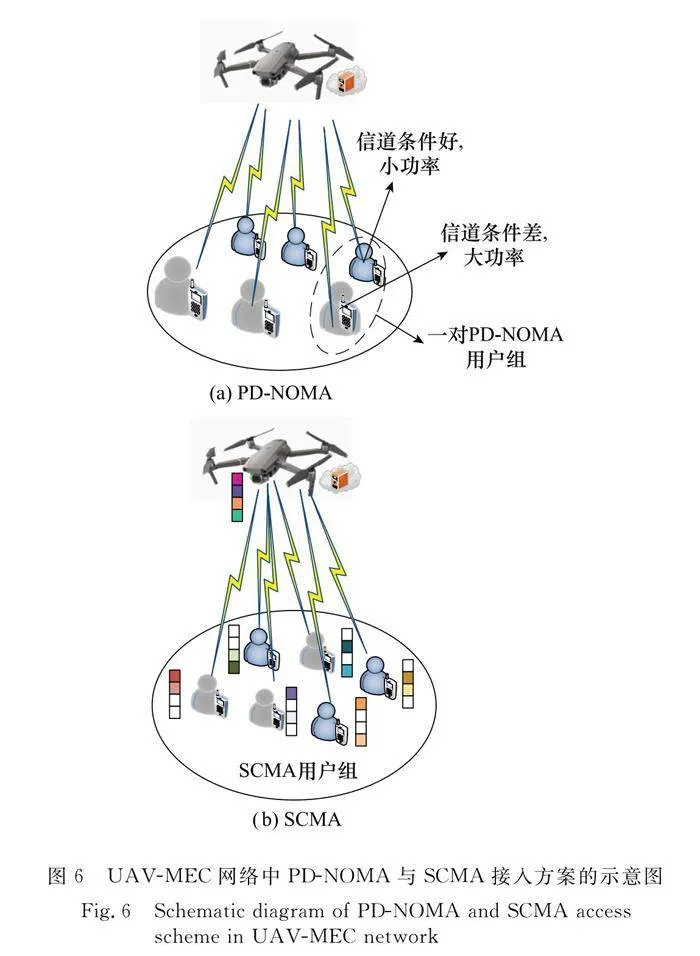
NOMA可以分為功率域NOMA(power-domain NOMA, PD-NOMA)和碼域NOMA(code-domain NOMA, CD-NOMA)。PD-NOMA 通過優化功率分配在功率域進行多用戶復用,實施嚴格的功率控制,在接收端利用連續干擾消除(successive interference cancelation, SIC)算法,利用不同的信道增益依次解出各個用戶設備的信號。速率分拆多址技術(rate splitting multiple access, RSMA)結合了前文所提的SDMA以及PD-NOMA,通過對用戶消息的拆分以及多用戶通用消息和用戶私有消息解碼實現非正交傳輸。CD-NOMA技術是通過一定的構造準則,如交織、稀疏擴頻、擾碼、信道編碼等,獲得一系列非正交序列后分配給不同用戶,使其能夠獲得更高的頻譜效率以及抗過載能力。稀疏碼多址接入(sparse code multiple access, SCMA)技術是一類將多維調制和稀疏擴頻技術相結合的性能優異的CD-NOMA技術。
圖6展示了UAV-MEC網絡中PD-NOMA與SCMA接入方案。針對PD-NOMA方案在UAV-MEC網絡的實際應用,采用預分組的方法通過對信道的預知信息,將一個信道條件差的和信道條件好的用戶分為一組,組內用戶設備采用差異的功率。對于SCMA為代表的CD-NOMA方案,根據碼本的大小,將不同的用戶分配不同的碼本并疊加傳輸,接收端利用消息傳遞算法(message passing algorithm, MPA)求解各個用戶的信號。與OMA相比,NOMA可以提高用戶的傳輸速率和頻譜利用率。由于NOMA能夠適應大規模連接,基于NOMA技術的UAV-MEC系統可以為大規模接入網絡(如傳感器網絡和物聯網)中的眾多移動終端提供靈活的計算服務。
在基于NOMA的UAV-MEC系統中,用戶設備通過NOMA協議將任務數據上傳到UAV MEC服務器,UAV完成任務計算后將結果返回到終端設備。NOMA協議引入了設備之間的干擾,當上傳任務數據量大時,隨機分配任務數據可能會導致設備之間產生較強的干擾,從而增加設備之間的能量消耗,導致任務計算時間增加。在任務時間容忍度和多設備的發射功率固定的情況下,計算資源的分配也會直接影響計算延遲并對設備的能耗產生影響。UAV的動態軌跡決定了用戶設備與UAV之間的信道增益,這對任務數據的傳輸時間以及UAV的能量消耗有很大的影響。因此,需要聯合優化NOMA的功率或碼本分配、UAV軌跡、任務數據分配和計算資源分配,最小化UAV的能耗同時降低任務計算時間、最大化計算任務的處理數[33]。
為了探討設備接入策略對系統能耗的影響,文獻[34]研究UAV-MEC網絡上行傳輸中TDMA、OFDMA和NOMA接入方案;在UAV動作、發射功率和比特因果關系的約束條件下,聯合優化比特分配、UAV軌跡、UAV功率分配和資源分配,從能量消耗的角度研究了UAV-MEC系統;針對TDMA和OFDMA方案,利用SCA技術得到一個次優方案;針對NOMA方案,將原始問題分解為兩個子問題,并通過對兩個子問題的交替優化發展出一種高效的迭代算法;相比之下,NOMA方案比TDMA、OFDMA節省了更多的UAV能耗,但是NOMA接收端采用的SIC技術可能會導致額外的實現復雜度。文獻[35]研究TDMA和NOMA兩種接入方案下,UAV-MEC系統能量最小化的問題;當終端任務的時延限制為2.7 s時,相比TDMA,NOMA方案的能量消耗降低了18.75%。當終端任務的時延要求很嚴格時,TDMA的性能會優于NOMA性能,原因是由于NOMA接收復雜度更高,更短的任務截止時間會限制NOMA的性能,導致更大的能耗。文獻[36]為了支持UAV-MEC網絡中眾多設備接入,以及處理上行場景中終端產生的大量數據流量,采用NOMA 接入方案;與OMA相比,所提方案的能耗降低了16.66%。文獻[37]指出利用NOMA方案,在8個用戶的UAV-MEC網絡中,加權能耗比OMA減少了約20%,并隨著用戶數量的增加,優勢會進一步擴大。文獻[38]將RSMA引入UAV-MEC網絡,用戶可以將其任務卸載到空中MEC平臺計算,通過優化RSMA的卸載決策、分拆比、解碼順序使響應時延和處理能耗最小化,結果表明系統能耗優于PD-NOMA方案。
針對用戶接入策略對任務計算延遲的作用,文獻[39]將NOMA引入UAV-MEC網絡中提高頻譜效率,在考慮UAV能耗和設備QoS的前提下,進行聯合軌跡和計算卸載優化,最小化所有用戶任務的總延遲。文獻[40]建模一對PD-NOMA用戶組的上傳時間和同信道干擾之間的相互作用,通過半定松弛和凹凸過程迭代確定NOMA用戶配對和卸載決策,該方案能有效地抑制同信道干擾,降低用戶平均上傳時延并增加待上傳用戶數量。文獻[41-42]提出針對SCMA的碼本分配優化算法,驗證在MEC網絡中SCMA方案比OFDMA接入可以減少數據的上傳時間,從而使得整體任務計算時延降低。文獻[43]研究基于NOMA接入方案的UAV-MEC系統,在滿足UAV覆蓋率的前提下,最大化所有物聯網設備的計算率的問題;該框架采用NOMA方案,使多個設備能夠同時將其任務傳輸給UAV,相比TDMA方案,提高物聯網設備的任務計算率。文獻[44]將RSMA技術引入UAV的下行傳輸中,通過優化RSMA的預編碼、分拆速率,最大化用戶加權和數據速率,證明RSMA相對于NOMA的優勢。文獻[45]提出一種RSMA輔助MEC方案,用戶能夠利用RSMA將計算任務卸載到MEC服務器,求出成功計算概率的封閉表達式,相比現有的OMA與NOMA方案,RSMA能夠提高成功計算概率。UAV-MEC網絡中多址接入技術總結對比如表1所示。
2.2 計算卸載策略
在UAV-MEC網絡中,計算卸載是指通過無線接入方案,將計算任務所需數據從用戶設備上傳到配備MEC服務器的UAV或基站并執行的過程[46]。計算卸載的目的主要是為了加快計算任務的執行時間,降低系統能耗,從而更好地提高用戶體驗。根據設備的計算任務模型,計算卸載可以分為整體卸載和部分卸載。整體卸載適用于高度集成或者不可分割的任務(如復雜數學運算)。這種類型的任務必須整體在本地執行或者卸載到MEC服務器。部分卸載是將用戶的復雜任務分成若干功能模塊,每個子任務分別執行計算卸載決策。
設備的計算卸載策略應該包含以下決策:① 是否應該將任務上傳到MEC服務器?② 該任務是否可以分割?即決定該任務可以整體卸載還是部分卸載。③ 將該任務上傳到哪個MEC服務器?當UAV-MEC網絡中有多個MEC服務器存在時,尋找一個計算資源空閑且信道好的MEC服務器更利于計算卸載。④ 根據哪種優化目標決定計算卸載策略?不同任務對完成時間的限制是不同的,應當根據系統能耗、資源狀態以及任務的時延要求選擇恰當的優化目標。在UAV-MEC網絡中,請求計算卸載服務的用戶設備往往有時延敏感型、資源密集型和數據密集型任務,計算任務的完成時間以及用戶設備和UAV消耗的能量是評價UAV-MEC系統中用戶QoS的指標。計算卸載決策結果由系統能量消耗和完成計算任務時延決定。計算卸載策略的目標主要分為降低時延、降低能耗以及權衡時延與能量三方面。
2.2.1 以降低時延為目標的計算卸載策略
終端用戶設備具備時延敏感型任務時,可以采用以降低時延為目標的計算卸載策略。在UAV-MEC網絡中,當進行計算卸載時,任務的完成時間包括上傳到UAV的傳輸時間、UAV MEC服務器計算時間以及回傳時間。當本地運行時,任務的完成時間為設備本地計算時間。此時,需要設計有效計算卸載策略,既充分利用UAV-MEC的計算能力滿足各用戶的任務時延要求,又避免多用戶擁擠搶占計算資源、導致整體時間變長的情況。
文獻[47]采用部分卸載的方式,計算任務分為兩部分,一部分由UAV完成,其他部分由本地計算;通過共同優化UAV軌跡、部分卸載任務的比率和用戶調度變量,最小化用戶設備任務的最大時延之和;在引入輔助變量的基礎上,提出一種改進的基于懲罰對偶分解的算法;仿真分析表明,該算法的復雜度較低,且降低了設備任務的時延。文獻[48]探討基于毫米波回程的低延遲UAV-MEC網絡,采用聯合交替方向乘子法(alternating direction method of multipliers, ADMM)、Dinkelbach算法和SCA算法求解最小化任務時延的問題,得到最優的卸載策略;所提算法能夠較好地完成設備的時間敏感型任務。文獻[49]研究UAV輔助的超高可靠低延遲計算卸載的問題,利用SCA算法解決UAV優化布局的規劃問題以及在UAV能量受限的情況下進行資源分配和計算卸載決策的問題。文獻[50]考慮UAV-MEC網絡中多UAV協同提供計算服務,以最小化所有設備之間的最大任務完成延遲為目標,提出一種基于BCD和SCA技術的迭代算法來獲得近似最優解。文獻[51]研究多UAV邊緣云協同卸載的延遲最小化問題,采用凸近似方法使原始問題易于處理,利用李雅普諾夫優化方法進行在線任務卸載決策。為了實現UAV之間的合作,文獻[52]提出一種穩定匹配算法,將計算任務卸載問題轉化為雙邊匹配問題,利用迭代算法,使每架UAV與最適合卸載的設備相匹配,有效降低了平均時延。文獻[53]提出一種基于Stackelberg博弈方法求解多層UAV-MEC網絡中計算卸載決策問題,配備MEC服務器的UAV通過考慮其他UAV的行為來優化其定價,以最大化收入;每個用戶設備選擇最佳的計算任務卸載策略,最大限度地減少延遲;仿真結果表明,該方案能有效地降低UAV的卸載時延。文獻[54]在UAV-MEC系統中,將復雜的計算任務分解為具有相互依賴性的典型任務流;通過考慮UAV任務、動態網絡狀態和能量約束的相互依賴性,建立平均任務響應時間最小化問題,并將其建模為馬爾可夫決策過程;每次任務到達或任務執行完成時,方案應該決定下一個任務執行的無人機MEC服務器,實現協同任務卸載,提出了多智能體強化學習(multi-agent reinforcement learning, MARL)算法的計算卸載策略;基于MARL的計算卸載策略具有較好的收斂性,能夠顯著降低平均任務響應時間并能適應動態環境。
2.2.2 以降低能耗為目標的計算卸載策略
資源密集型計算任務占有較多的通信和計算資源的同時會消耗大量的能量,此時終端可以采用降低能耗為目標的計算卸載策略。在UAV-MEC系統中,用戶設備以及UAV的電池都是有限的,UAV在飛行的同時,還需要提供計算服務,續航能力無法得到有效的保證。當進行計算卸載時,完成任務消耗的能量包括設備上傳到UAV消耗的能量、UAV維持飛行消耗的能量、UAV-MEC服務器計算消耗的能量以及回傳消耗的能量。當本地運行時,任務消耗的能量為設備本地計算能耗。設計有效的計算卸載策略,在滿足計算任務時延要求下,能夠降低用戶設備以及UAV的能耗,更加適合實際場景應用。
文獻[55]考慮UAV-MEC系統中,最小化物聯網設備的能量消耗以及UAV的能量消耗問題;在所有物聯網設備任務的時延約束和通信計算容量資源的限制下,使用BCD算法交替求解得出最佳的任務分配策略;仿真結果表明,該方法顯著降低了系統功耗。文獻[56]研究UAV增強邊緣計算網絡的能量最小化問題,將該優化問題表述為混合整數非凸優化問題,并提出一種基于BCD和SCA技術的迭代優化算法,降低完成任務的總能耗,驗證任務卸載的必要性。文獻[57]在UAV計算卸載策略、資源分配和飛行軌跡調度的約束下,最小化移動用戶設備和UAV的平均加權能耗;利用李雅普諾夫優化法分析計算任務隊列,并利用交替迭代優化法求解出了計算卸載策略。文獻[58]研究基于多UAV聯盟的UAV-MEC網絡的計算卸載問題,針對分層卸載特征,給出一個離散的多領導者多跟隨者的能量最小化Stackelberg博弈,并證明納什均衡的存在性;仿真結果表明,與現有的一些方法相比,所提算法能夠實現較低的網絡能耗。文獻[59]將人工智能引入UAV-MEC網絡,實現智能任務的卸載和資源的分配;深度強化學習(deep reinforcement learning, DRL)是UAV-MEC系統中高效決策的無模型解決方案,如任務卸載決策和計算資源分配;深度神經網絡(deep neural network, DNN)的擬合能力為UAV-MEC系統的計算任務預測提供一種方法;預測結果可用于進一步提高多UAV協同卸載的性能。文獻[60]針對UAV-MEC系統,利用長短期記憶網絡(long short term memory,LSTM)進行計算任務預測,并在此基礎上提出能耗最優的3層計算卸載算法;實驗表明,該算法可以根據任務所需的時延、UAV高度和數據大小,動態規劃UAV-MEC網絡的計算卸載策略,從而有效降低UAV的能耗。文獻[61]提出一個基于博弈理論和DRL算法框架用于多UAV與地面基站協同網絡的計算卸載;該框架可以通過馬爾可夫決策過程求解多UAV與地面基站MEC服務器協同的計算卸載最優策略。
2.2.3 權衡時延和能耗的計算卸載策略
根據前述,時延和能耗是UAV-MEC網絡中的重要性能指標。當設備有復雜的計算任務需要執行時,往往能耗和時延都會影響用戶服務體驗質量,因此權衡能耗和時延的計算卸載策略也是一個重要的研究方向。
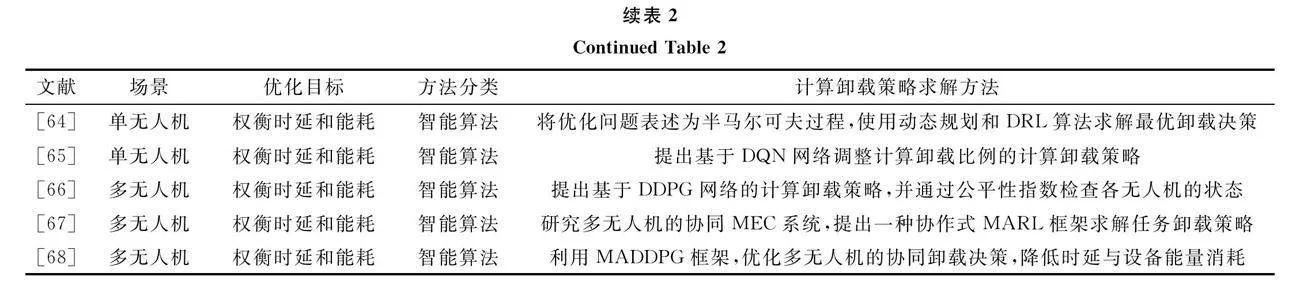
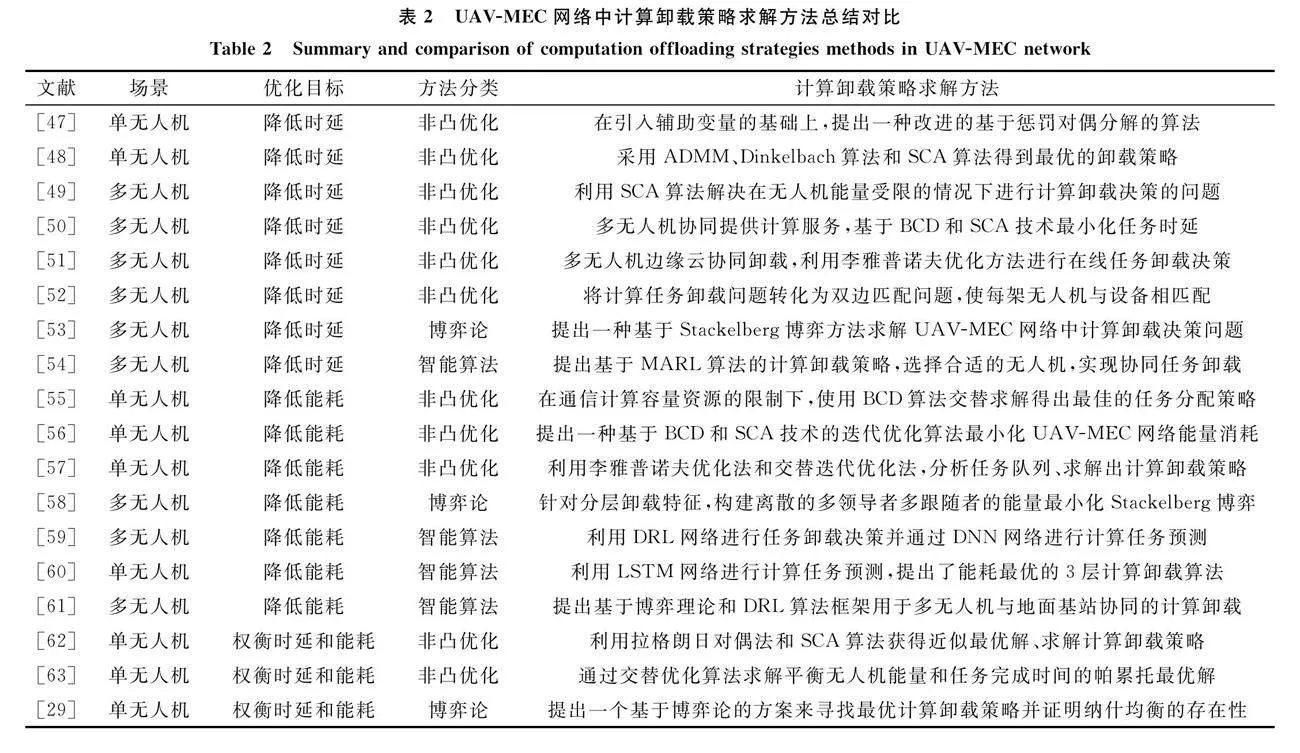
文獻[62]研究UAV-MEC具體場景,其中每個終端可以使用3種計算策略,即本地計算、卸載部分任務到 UAV 進行計算、通過UAV中繼將任務卸載到基站,文中通過優化計算卸載比特分配、時隙調度、和功率分配以及UAV軌跡權衡時延和能耗加權和,并利用拉格朗日對偶法和SCA算法獲得近似最優解。文獻[63]研究計算卸載和資源分配的聯合設計,通過交替優化算法求解了權衡UAV能量和任務完成時間的帕累托最優解,仿真結果證實所提解決方案能夠達到UAV在MEC系統中完成時間和能量消耗之間的權衡。文獻[29]研究UAV-MEC系統中最小化時間延遲和能量消耗的加權和的問題;提出一個基于博弈論的方案來尋找最優計算卸載策略并證明納什均衡的存在性;仿真結果表明,該博弈論方案能夠達到接近最優的性能。文獻[64]考慮UAV作為用戶設備的場景,機載資源有限的處理能力和能量存儲,使復雜信號的實時分析受到限制;此時,UAV可以對接邊緣計算資源,卸載計算任務,降低對傳感器輸入的響應時間,降低能耗;而動態的信道條件和邊緣服務器擁塞情況可能會影響任務卸載的性能;提出一個基于網絡、計算負荷參數和當前狀態的最優卸載決策框架,將時延和能耗的優化問題表述為半馬爾可夫過程的最優停止時間問題,并使用動態規劃和DRL方法求解該問題。文獻[65]提出一種基于深度Q網絡(deep Q network,DQN)調整計算卸載比例的策略,降低UAV-MEC網絡中任務延遲和能量消耗的線性加權和。文獻[66]考慮一個配備MEC服務器的多UAV集群網絡,每個UAV集群簇頭作為一個智能體,以分布式方法分配計算資源給終端設備;提出一種基于無模型DRL的協同計算卸載與資源分配方案,其中每個智能體基于深度確定性策略梯度(deep deterministic policy gradient, DDPG)網絡訓練并學習高效的計算卸載策略,通過公平性指數檢查各UAV的狀態, 文中目標是通過自適應學習,最大限度地減少任務的執行延遲和能量消耗,并獲得有效的計算卸載策略。文獻[67]研究多UAV的協同MEC系統,提出一種協作式MARL框架求解任務卸載策略使任務執行延遲和能量消耗之和最小化。文獻[68]提出一種多智能體DDPG(multi-agent DDPG, MADDPG)框架,共同優化多UAV的飛行路線和物聯網設備的協同卸載決策,降低任務處理延遲和設備能量消耗。表2總結對比了上述文獻中不同計算卸載策略的求解方法。
3 未來研究方向
UAV-MEC網絡具備部署靈活、在網絡邊緣及時提供計算能力、降低任務處理時延等優點。雖然已經有大量研究人員對UAV-MEC網絡的相關問題進行了研究,但是該方向尚處于起步階段,仍然存在一些尚未解決的問題。
(1) UAV-MEC網絡實際部署架構。本文綜述了現有文獻,并初步提出UAV-MEC網絡中基于NFV和SDN的技術框架,但距離實際應用還有一定距離。如何考慮UAV上通信模塊與邊緣計算平臺的任務數據傳遞與重構,研究更符合實際情況的部署架構,使得UAV-MEC網絡從理論到實際應用值得進一步的探索。并且在實際環境中,許多用戶設備都使用不同的通信協議和模式交互。由于通信協議以及任務表達方式多樣性,整體系統的協調性是一種挑戰。因此,需要進一步研究實際環境中各個用戶設備與UAV服務器之間的通信協議與計算任務表達方式的轉換,確保實際應用的可行性。
(2) UAV-MEC網絡性能分析模型。現有的研究考慮理想的LoS鏈路,在未來的工作中可以考慮復雜的飛行和通信模型,如考慮到用戶的移動性和衰落因素,利用瑞利、萊斯與Nakagami-m信道衰落模型。在更貼合實際的信道模型基礎下,如何利用隨機幾何的方法針對網絡設備容量、吞吐量、覆蓋率、可靠性和中斷率等性能參數分析是一個具有挑戰性的問題。
(3) UAV-MEC網絡中適應更高過載率、更大吞吐量、免授權和低復雜度的多址接入方式。未來網絡中,可能會有大量用戶同時請求計算資源。目前,OMA接入方式在面對大量的設備過載接入的時候,頻帶資源占用消耗嚴重,導致傳輸速率下降,部分設備計算任務時延要求難以滿足。而NOMA技術可以對抗用戶數量劇增后造成的過載現象,但其接收端的復雜度較高且免授權的NOMA技術仍需研究。為了同時服務更多用戶,增加用戶任務上傳的速率,進而降低任務完成的時間以及能耗,需要研究更適應于UAV通信網絡的多址接入方式。
(4) UAV-MEC網絡中安全計算卸載與數據隱私框架。由于網絡中數據傳輸是通過無線方式實現的,容易受到很多安全威脅,并且無授權的連接會侵犯系統的隱私。因此,如何針對惡意的請求計算服務的節點進行檢測,并保證數據的安全防止竊聽,有必要提出和設計安全機制來提高UAV-MEC網絡的安全性。區塊鏈技術利用分布式資源來維護共享數據的安全,引入區塊鏈的技術,可以識別威脅系統隱私的各種攻擊和惡意用戶節點,能夠增強穩定性和安全性。UAV-MEC網絡中的抗干擾技術以及結合驗證與計算卸載任務相關的安全認證的身份驗證流程也是一種解決方案。
(5) UAV集群協同與空天地協同計算方案。由于用戶設備快速移動以及對任務的高度動態需求,UAV網絡中的協同行為具有重要意義。在UAV集群中,如何制定整體的計算卸載決策是一個關鍵的問題。UAV集群的計算卸載決策有集中式和分布式兩種方式。在集中式方式中,UAV集群的簇頭配備一個中央控制器,負責收集各個UAV反饋的狀態信息,并以集中式方式做出所有決策。但集中式的方式容易遭遇網絡堵塞以及損毀的問題。基于此,分布式方法是一個可行的解決方案,可以利用多智能體強化學習以及“集中式訓練、分布式執行”的方式,決定計算卸載決策,并且做到多UAV服務器之間的任務無縫切換。考慮地面以及衛星MEC服務器存在計算資源的情況,UAV可以將任務卸載或中繼到具有所需計算資源的地面以及衛星基站,構建空天地協同計算方案,進一步降低計算任務的時延與能耗。
4 結束語
近年來,UAV-MEC網絡受到國內外研究學者的廣泛關注,其具備部署靈活、及時提供計算服務等優點。本文對近幾年UAV-MEC網絡的研究進行了總結歸納。首先,總結提出了基于NFV和SDN的網絡技術架構以及該網絡適用的應用場景。然后,對比了網絡中多種接入方案,并對最新的計算卸載策略進行了總結和分析。最后,針對UAV-MEC網絡提出了未來研究方向。
參考文獻
[1] LI A, DAI L B, YU L S, Resource allocation for multi-UAV-assisted mobile edge computing to minimize weighted energy consumption[J]. IET Communications, 2022, 16(17): 2070-2081.
[2] MAO Y Y, YOU C S, ZHANG J, et al. A survey on mobile edge computing: the communication perspective[J]. IEEE Communications Surveys and Tutorials, 2017, 19(4): 2322-2358.
[3] 李安, 戴龍斌, 余禮蘇, 等. 加權能耗最小化的無人機輔助移動邊緣計算資源分配策略[J]. 電子與信息學報, 2022, 44(11): 3858-3865.
LI A, DAI L B, YU L S, et al. Resource allocation for unmanned aerial vehicle-assisted mobile edge computing to minimize weighted energy consumption[J]. Journal of Electronics amp; Information Technology, 2022, 44(11): 3858-3865.
[4] 卞穎穎. 5G通信技術促進軍用無人機發展[J]. 軍事文摘, 2019(7): 20-23.
BIAN Y Y. 5G communication technology boosts the development of military drones[J]. Military Digest, 2019(7): 20-23.
[5] 余雪勇, 朱燁, 邱禮翔, 等. 基于無人機輔助邊緣計算系統的節能卸載策略[J]. 系統工程與電子技術, 2022, 44(3): 1022-1029.
YU X Y, ZHU Y, QIU L X, et al. Energy efficient offloading strategy for UAV aided edgecomputing systems[J]. Systems Engineering and Electronics, 2022, 44(3): 1022-1029.
[6] JAAFAR W, NASER S, MUHAIDAT S, et al. Multiple access in aerial networks: from orthogonal and non-orthogonal to rate-splitting[J]. IEEE Open Journal of Vehicular Technology, 2020, 1: 372-392.
[7] NEW W K, LEOW C Y, NAVAIE K, et al. Application of NOMA for cellular-connected UAVs: opportunities and challenges[J]. SCIENCE CHINA Information Sciences, 2021, 64(4): 22-35.
[8] 李子姝, 謝人超, 孫禮, 等. 移動邊緣計算綜述[J]. 電信科學, 2018, 34(1): 87-101.
LI Z S, XIE R C, SUN L, et al. A survey of mobile edge computing[J]. Telecommunication Science, 2018, 34(1): 87-101.
[9] 張依琳, 梁玉珠, 尹沐君, 等. 移動邊緣計算中計算卸載方案研究綜述[J]. 計算機學報, 2021, 44(12): 2406-2430.
ZHANG Y L, LIANG Y Z, YIN M J, et al. Survey on the methods of computation offloading in mobile edge computing[J]. Chinese Journal of Computers, 2021, 44(12): 2406-2430.
[10] ABRAR M, AJMAL U, ALMOHAIMEED Z M, et al. Energy efficient UAV-enabled mobile edge computing for IoT devices: a review[J]. IEEE Access, 2021, 9: 127779-127798.
[11] 莫鴻彬, 李猛. 無人機邊緣計算網絡: 架構, 關鍵技術與挑戰[J]. 廣東通信技術, 2021, 41(4): 54-59.
MO H B, LI M. Edge computing networks for unmanned aerial vehicles: architecture, key technologies and challenges[J]. Guangdong Communications Technology, 2021, 41(4): 54-59.
[12] 邱銘. 基于無人機移動邊緣計算的軟件定義網絡架構分析[J]. 電子世界, 2020(5): 62-63.
QIU M. Architecture analysis of software-defined network for UAV-based mobile edge computing[J]. Journal of Electronic World, 2020(5): 62-63.
[13] LIN C, HAN G, SHAH S B H, et al. Integrating mobile edge computing into unmanned aerial vehicle networks: an SDN-enabled architecture[J]. IEEE Internet of Things Magazine, 2021, 4(4): 18-23.
[14] HUDA S M A, MOH S. Survey on computation offloading in UAV-enabled mobile edge computing[J]. Journal of Network and Computer Applications, 2022, 201: 103341.
[15] LIU Z W, CAO Y, GAO P, et al. Multi-UAV network assisted intelligent edge computing: challenges and opportunities[J]. China Communications, 2022, 19(3): 258-278.
[16] 董超, 沈赟, 屈毓錛. 基于無人機的邊緣智能計算研究綜述[J]. 智能科學與技術學報, 2020, 2(3): 227-239.
DONG C, SHEN Y, QU Y Z. A survey of edge intelligent computing based on UAV[J]. Journal of Intelligent Science and Technology, 2020, 2(3): 227-239.
[17] BEKKOUCHE O, BAGAA M, TALEB T. Toward a UTM-based service orchestration for UAVs in MEC-NFV environment[C]∥Proc.of the IEEE Global Communications Confe-rence, 2019.
[18] MOTLAGH N H, BAGAA M, TALEB T. UAV-based IoT platform: a crowd surveillance use case[J]. IEEE Communications Magazine, 2017, 55(2): 128-134.
[19] XU Y J, YANG M, YANG Y, et al. Max-min energy-efficient optimization for cognitive heterogeneous networks with spectrum sensing errors and channel uncertainties[J]. IEEE Wireless Communications Letters, 2021, 11(6): 1113-1117.
[20] DU Y, YANG K, WANG K Z, et al. Joint resources and workflow scheduling in UAV-enabled wirelessly-powered MEC for IoT systems[J]. IEEE Trans.on Vehicular Technology, 2019, 68(10): 10187-10200.
[21] XU Y, ZHANG T K, YANG D C, et al. Joint resource and trajectory optimization for security in uav-assisted MEC systems[J]. IEEE Trans.on Communications, 2021, 69(1): 573-588.
[22] SUN C, NI W, WANG X. Joint computation offloading and trajectory planning for UAV-assisted edge computing[J]. IEEE Trans.on Wireless Communications, 2021, 20(8): 5343-5358.
[23] YU Z, GONG Y M, GONG S M, et al. Joint task offloading and resource allocation in UAV-enabled mobile edge computing[J]. IEEE Internet of Things Journal, 2020, 7(4): 3147-3159.
[24] LI W T, ZHAO M X, WU Y H, et al. Collaborative offloading for UAV-enabled time-sensitive MEC networks[J]. EURASIP Journal on Wireless Communications and Networking, 2021, 2021: 1.
[25] LIU S Y, YANG T T. Delay aware scheduling in UAV-enabled OFDMA mobile edge computing system[J]. IET Communications, 2020, 14(18): 3203-3211.
[26] WU Y H, WANG Y H, ZHOU F H, et al. Computation efficiency maximization in OFDMA-based mobile edge computing networks[J]. IEEE Communications Letters, 2020, 24(1): 159-163.
[27] XU Y, ZHANG T K, LIU Y W, et al. UAV-assisted MEC networks with aerial and ground cooperation[J]. IEEE Trans.on Wireless Communications, 2021, 20(12): 7712-7727.
[28] KHAN S, SAAD W, ZEESHAN M, et al. Implementation and analysis of multicode multicarrier code division multiple access (MC-MC CDMA) in IEEE 802. 11ah for UAV swarm communication[J]. Physical Communication, 2020, 42: 101159.
[29] ZHANG K Y, GUI X L, REN D W, et al. Energy-latency tradeoff for computation offloading in UAV-assisted multiaccess edge computing system[J]. IEEE Internet of Things Journal, 2021, 8(8): 6709-6719.
[30] ZHANG Q X, CHEN J R, JI L, et al. Response delay optimization in mobile edge computing enabled UAV swarm[J]. IEEE Trans.on Vehicular Technology, 2020, 69(3): 3280-3295.
[31] XU Y J, HU R Q, LI G Q. Robust energy-efficient maximization for cognitive NOMA networks under channel uncertainties[J]. IEEE Internet of Things Journal, 2020, 7(9): 8318-8330.
[32] XU Y J, QIN Z J, GUI G, et al. Energy efficiency maximization in NOMA enabled backscatter communications with QoS guarantee[J]. IEEE Wireless Communications Letters, 2020, 10(2): 353-357.
[33] DIAO X B, ZHENG J C, WU Y, et al. Joint trajectory design, task data, and computing resource allocations for NOMA-based and UAV-assisted mobile edge computing[J]. IEEE Access, 2019, 7: 117448-117459.
[34] HUA M, HUANG Y M, WANG Y, et al. Energy optimization for cellular-connected multi-UAV mobile edge computing systems with multi-access schemes[J]. Journal of Communications and Information Networks, 2018, 3(4): 33-44.
[35] JEONG S, SIMEONE O, KANG J. Mobile edge computing via a UAV-mounted cloudlet: optimization of bit allocation and path planning[J]. IEEE Trans.on Vehicular Technology, 2018, 67(3): 2049-2063.
[36] BUDHIRAJA I, KUMAR N, TYAGI S, et al. Energy consumption minimization scheme for NOMA-based mobile edge computation networks underlaying UAV[J]. IEEE Systems Journal, 2021, 15(4): 5724-5733.
[37] ZHANG X C, ZHANG J, XIONG J, et al. Energy-efficient multi-UAV-enabled multiaccess edge computing incorporating NOMA[J]. IEEE Internet of Things Journal, 2020, 7(6): 5613-5627.
[38] TRUONG T P, DAO N N, CHO S. HAMEC-RSMA: enhanced aerial computing systems with rate splitting multiple access[J]. IEEE Access, 2022, 10: 52398-52409.
[39] GUO F X, ZHANG H L, JI H, et al. Joint trajectory and computation offloading optimization for UAV-assisted MEC with NOMA[C]∥Proc.of the IEEE Conference on Computer Communications Workshops, 2019.
[40] SHENG M, DAI Y P, LIU J Y, et al. Delay-aware computation offloading in NOMA MEC under differentiated uploading delay[J]. IEEE Trans.on Wireless Communications, 2020, 19(4): 2813-2826.
[41] LIU P T, AN K, LEI J, et al. SCMA-based multiaccess edge computing in IoT systems: an energy-efficiency and latency tradeoff[J]. IEEE Internet of Things Journal, 2022, 9(7): 4849-4862.
[42] LIU P T, LEI J, LIU W. An optimization scheme for SCMA-based multi-access edge computing[C]∥Proc.of the IEEE 93rd Vehicular Technology Conference, 2021.
[43] FENG W M, TANG J, ZHAO N, et al. Hybrid beamforming design and resource allocation for UAV-aided wireless-powered mobile edge computing networks with NOMA[J]. IEEE Journal on Selected Areas in Communications, 2021, 39(11): 3271-3286.
[44] JAAFAR W, NASER S, MUHAIDAT S, et al. On the downlink performance of RSMA-based UAV communications[J]. IEEE Trans.on Vehicular Technology, 2020, 69(12): 16258-16263.
[45] CHEN P X, LIU H W, YE Y H, et al. Rate-splitting multiple access aided mobile edge computing with randomly deployed users[J]. IEEE Journal on Selected Areas in Communications, 2023, 41(5): 1549-1564.
[46] XU Y, GU B, HU R Q, et al. Joint computation offloading and radio resource allocation in MEC-based wireless-powered backscatter communication networks[J]. IEEE Trans.on Vehicular Technology, 2021, 70(6): 6200-6205.
[47] HU Q Y, CAI Y L, YU G D, et al. Joint offloading and trajectory design for UAV-enabled mobile edge computing systems[J]. IEEE Internet of Things Journal, 2019, 6(2): 1879-1892.
[48] YU Y, BU X Y, YANG K, et al. UAV-aided low latency mobile edge computing with mmWave backhaul[C]∥Proc.of the IEEE International Conference on Communications, 2019.
[49] HABER E E, ALAMEDDINE H A, ASSI C, et al. UAV-aided ultra-reliable low-latency computation offloading in future IoT networks[J]. IEEE Trans.on Communications, 2021, 69(10): 6838-6851.
[50] ZHENG G Y, XU C, WEN M W, et al. Service caching based aerial cooperative computing and resource allocation in multi-UAV enabled mec systems[J]. IEEE Trans.on Vehicular Technology, 2022, 71(10): 10934-10947.
[51] BAI Z Y, LIN Y F, CAO Y, et al. Delay-aware cooperative task offloading for multi-UAV enabled edge-cloud computing[J]. IEEE Trans.on Mobile Computing, 2024, 23(2): 1034-1049.
[52] CHEN W W, SU Z, XU Q L, et al. VFC-based cooperative UAV computation task offloading for post-disaster rescue[C]∥Proc.of the IEEE Conference on Computer Communications, 2020: 228-236.
[53] LIU J F, LI L X, YANG F C, et al. Minimization of offloading delay for two-tier UAV with mobile edge computing[C]∥Proc.of the 15th International Wireless Communications amp; Mobile Computing Conference, 2019: 1534-1538.
[54] ZHU S C, GUI L, ZHAO D M, et al. Learning-based computation offloading approaches in UAVs-assisted edge computing[J]. IEEE Trans.on Vehicular Technology, 2021, 70(1): 928-944.
[55] ALSENWI M, TUN Y K, RAJ-PANDEY S, et al. UAV-assisted multi-access edge computing system: an energy-efficient resource management framework[C]∥Proc.of the International Conference on Information Networking, 2020: 214-219.
[56] GUO H Z, LIU J J. UAV-enhanced intelligent offloading for internet of things at the edge[J]. IEEE Trans.on Industrial Informatics, 2020, 16(4): 2737-2746.
[57] ZHANG J, ZHOU L, TANG Q, et al. Stochastic computation offloading and trajectory scheduling for UAV-assisted mobile edge computing[J]. IEEE Internet of Things Journal, 2019, 6(2): 3688-3699.
[58] CHEN J X, WU Q H, XU Y H, et al. A multi-leader multi-follower Stackelberg game for coalition-based UAV MEC networks[J].IEEE Wireless Communications Letters, 2021, 10(11): 2350-2354.
[59] YANG Z, CHEN M Z, LIU X, et al. AI-driven UAV-NOMA-MEC in next generation wireless networks[J]. IEEE Wireless Communications, 2021, 28(5): 66-73.
[60] WU G X, MIAO Y M, ZHANG Y, et al. Energy efficient for UAV-enabled mobile edge computing networks: intelligent task prediction and offloading[J]. Computer Communications, 2020, 150: 556-562.
[61] ASHERALIEVA A, NIYATO D. Hierarchical game-theoretic and reinforcement learning framework for computational offloading in UAV-enabled mobile edge computing networks with multiple service providers[J]. IEEE Internet of Things Journal, 2019, 6(5): 8753-8769.
[62] ZHANG T K, XU Y, LOO J, et al. Joint computation and communication design for UAV-assisted mobile edge computing in IoT[J]. IEEE Trans.on Industrial Informatics, 2020, 16(8): 5505-5516.
[63] ZHAN C, HU H, SUI X F, et al. Completion time and energy optimization in the UAV-enabled mobile-edge computing system[J]. IEEE Internet of Things Journal, 2020, 7(8): 7808-7822.
[64] CALLEGARO D, LEVORATO M. Optimal edge computing for infrastructure-assisted UAV systems[J]. IEEE Trans.on Vehicular Technology, 2021, 70(2): 1782-1792.
[65] CHEN L M, KUANG X Y, ZHU F S, et al. Intelligent mobile edge computing networks for Internet of Things[J]. IEEE Access, 2021, 9: 95665-95674.
[66] SEID A M, BOATENG G O, ANOKYE S, et al. Collaborative computation offloading and resource allocation in multi-UAV-assisted IoT networks: a deep reinforcement learning approach[J]. IEEE Internet of Things Journal, 2021, 8(15): 12203-12218.
[67] ZHAO N, YE Z Y, PEI Y Y, et al. Multi-agent deep reinforcement learning for task offloading in UAV-assisted mobile edge computing[J]. IEEE Trans.on Wireless Communications, 2022, 21(9): 6949-6960.
[68] YU K J, CUI Q M, ZHANG Z Y, et al. Efficient UAV/satellite-assisted IoT task offloading: a multi-agent reinforcement learning solution[C]∥Proc.of the 27th Asia Pacific Conference on Communications, 2022: 83-88.
作者簡介
劉鵬濤(1997—),男,博士研究生,主要研究方向為通信計算資源分配、先進傳輸技術。
雷 菁(1968—),女,教授,博士,主要研究方向為現代通信技術、信息論與編碼。
劉 偉(1979—),男,副教授,博士,主要研究方向為現代通信技術、5G物聯網。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
電子制作(2018年11期)2018-08-04 03:26:08
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
工業設計(2016年12期)2016-04-16 02:52:00