基于優化粒子群算法的微納衛星電機參數整定
2024-12-03 00:00:00周航王昊金仲和
電機與控制學報 2024年10期



















摘 要:針對傳統PID控制器控制無刷電機時系統響應慢、速度波動大的問題,以及手動整定大規模電機參數繁瑣重復的問題,采用了一種基于粒子群優化算法的無刷直流電機PID參數整定方法,用于確定電機閉環控制系統中PI控制器的參數。首先建立磁場定向控制技術驅動的無刷直流電機控制系統仿真模型,然后在此模型上應用優化粒子群算法進行參數整定優化的迭代過程,得到整定后的控制器參數結果。分析優化粒子群算法整定后的電機速度響應和力矩輸出情況,并與傳統手動整定結果和其他算法的整定結果進行對比。實驗結果表明,提出的優化粒子群算法整定的控制器速度響應更快并且輸出力矩更穩定,并且對電機參數的小幅度變化有魯棒性,該方法可以適用于大規模同類別同批次的電機控制器參數標定。
關鍵詞:微納衛星;控制系統;無刷直流電機;PID控制;參數整定;粒子群算法
DOI:10.15938/j.emc.2024.10.002
中圖分類號:TM33
文獻標志碼:A
文章編號:1007-449X(2024)10-0013-11
收稿日期: 2024-04-16
作者簡介:周 航(2000—),男,碩士研究生,研究方向為電機控制、嵌入式技術;
王 昊(1974—),男,博士,副教授,博士生導師,研究方向為微小衛星姿態控制系統、星載新型傳感器及執行器;
金仲和(1970—),男,博士,教授,博士生導師,研究方向為微小衛星、微機電系統等。
通信作者:王 昊
Parameter tuning of micro-satellite motor based on optimized particle swarm optimization algorithm
ZHOU Hang1,2, WANG Hao1,2,3, JIN Zhonghe1,2,3
(1.Micro-Satellite Research Center, Zhejiang University, Hangzhou 310058, China; 2.Huanjiang Laboratory, Zhuji 311800, China; 3.Key Laboratory of Micro-Nano Satellite Research Zhejiang Province, Hangzhou 310058, China)
Abstract:In order to solve the problem of slow response and large speed fluctuation when the traditional PID controller controls the brushless motor, and to solve the problem of tedious and repetitive manual tuning of large-scale motor parameters, a PID parameter tuning method was adopted based on particle swarm optimization algorithm to determine the parameters of PI controller in the motor closed-loop control system. Firstly, the simulation model of brushless DC motor control system was established driven by field oriented control technology, and the optimization particle swarm optimization algorithm was applied to the model to carry out the iterative process of parameter tuning optimization, finally a set of controller parameter results were got. The speed response and torque output of the motor were analyzed after PSO tuning, and the results were compared with those of traditional manual tuning and other algorithms tuning. The experimental results show that the proposed optimized particle swarm optimization algorithm tuning controller has faster speed response and more stable output torque, and is robust to small changes of motor parameters. The method can be applied to large-scale motor controller parameter calibration of the same class and batch.
Keywords:micro satellites; control systems; brushless DC motors; PID control; parameter tuning; particle swarm optimization
0 引 言
隨著芯片、微機電系統(micro-electro-mechanical system,MEMS)等技術的不斷發展,電子系統的功耗和規模都在不斷縮小,同時帶來衛星體積的縮小。微納衛星低成本、短周期、快速交付的特點有助于衛星的商業化進程,同時規避大型衛星的巨大風險[1]。
衛星姿控系統作為微納衛星最重要的子系統之一,主要由動量輪組、磁力矩器和太陽敏感器等傳感器組成,其中動量輪組通過電機帶動負載的質量塊提供力矩輸出來實現衛星的姿態控制。無刷直流電機(brushless DC motor,BLDC)以高效率、良好的控制性、耐用性以及電氣噪音小等優點被廣泛用于工業中。因此,對BLDC的控制研究熱度居高不下,近年來研究者廣泛提出了非線性控制、最優控制、自適應控制等控制方法。然而上述控制方法存在理論復雜或實現困難的問題,所以PID控制至今仍是實用性最強,普適性最好的控制方法。目前可以通過一些方法優化PID控制器或者基于規則整定控制器參數[2-3],從而使整個系統具有更好的性能。在過去的幾年中,許多研究者也使用人工智能算法對PID參數進行整定以實現更好的性能,例如蜂群算法[4]、和諧搜索[5]、遺傳算法[6]、模擬退火算法[7]、粒子群優化算法[8]、細菌覓食算法[9]等。
Ensi和Enim等[10]采用多目標蟻群優化方法對PID控制器進行整定,通過誤差最小化目標函數來調整PID控制器的最優解,結果表明該優化方法與經典方法和遺傳算法相比具有更好的控制系統性能。
Jun Shi等[11]提出了PF-PI控制器,該方法是基于粒子群算法和模糊邏輯控制來優化PI控制器。在傳統的無刷電機控制基礎上,改進了PI控制器的結構和電機速度閉環系統的動態性能。
Smail Bazi等[12]提出了一種快速螢火蟲算法(fast firefly algorithm,FFA)來確定PID參數的最優值,并與標準螢火蟲算法進行比較,并在文中給出了通過FFA方法優化PI控制器參數來控制BLDC的應用。
Tingting Wang等[13]提出一種使用雙模糊邏輯系統(dnal fuzzy logic system,FLS)和和諧搜索算法(harmony search algorithm,HAS)優化PID的方法,通過MATLAB仿真進行實驗分析,驗證了其優越性和穩定性。
Ridwan等[8]實現了一種基于粒子群優化算法的控制器,考慮響應速度,誤差等指標,基于粒子群算法優化PID控制參數,結果表明所設計的PSO-PID控制器應用在BLDC上有更好的響應速度和更小的超調量和誤差。
Mohammad等[14]在PSO算法優化PID參數的基礎上,使用Ziegler-Nichols方法將Kp、Ki、Kd 3個參數變成2個參數,使得PSO的搜索維度下降,縮短了計算時間并使結果更加準確。文中仿真結果表明,所提出的基于粒子群優化的ziegler-nichols方法的PID控制(particle swarm optimization based ziegler-nichols method for PID control,PID-PSO-ZN)算法能夠精確地確定最佳PID參數,從而減少系統響應的上升時間和超調量。
本文采用優化粒子群算法對無刷電機控制系統的PI參數進行整定,以電機的速度響應和力矩輸出為指標,嘗試用一種自動化的方法找到電機控制系統中PI控制器的最優解。介紹BLDC的數學模型以及電機閉環控制系統的特征方程,簡述粒子群優化算法,介紹如何將優化PSO算法與PID控制器結合,利用Simulink對電機閉環控制系統進行仿真實驗,并分析電機的速度響應和力矩輸出在不同情況的表現。
1 無刷直流電機建模
無刷直流電機通常有三相定子繞組。每相的電壓方程表述如下:
其中:V為電機每相的電壓;R為相電阻(假設三相電阻相同);L為每相電感(假設三相電感相同);e為反電動勢;i為相電流。此處忽略各相互感的影響。
由式(1)的相電壓兩兩相減得到線電壓:
無刷電機的運動學方程表示如下:
Te=Kti(t);(4)
e=Kbω(t)。(5)
式(3)中:Te為電機的電動扭矩;J為轉動慣量;B為阻尼系數;TL為電機上的負載扭矩。式(4)表示電機轉矩和電流線性相關,Kt為電機扭矩系數。式(5)中:e為反電動勢;Kb為反電動勢常數。
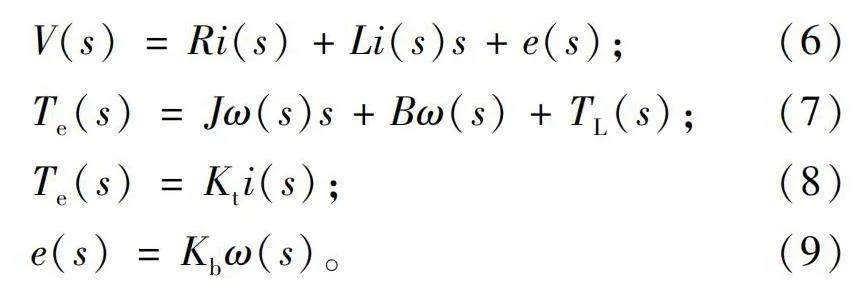
將式(1)、式(3)~式(5)進行拉普拉斯變換得到:
V(s)=Ri(s)+Li(s)s+e(s);(6)
Te(s)=Jω(s)s+Bω(s)+TL(s);(7)
Te(s)=Kti(s);(8)
e(s)=Kbω(s)。(9)
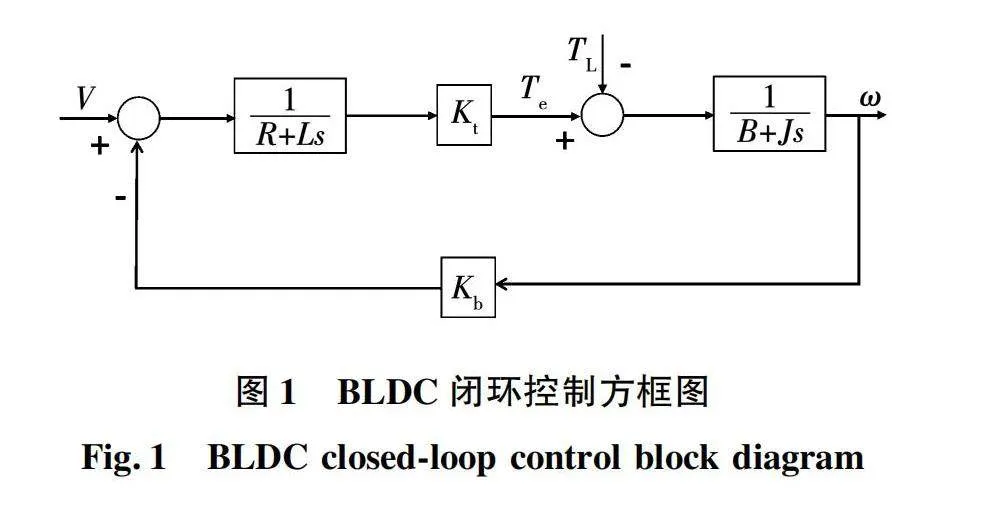
根據式(6)~式(9)可以推導出受輸入電壓和負載轉矩影響的響應速度為
根據式(10)得到 BLDC的閉環控制框圖如圖1所示,在后續的建模和實驗中,也將采用雙閉環的控制系統,電流環為內環,速度環為外環,實現對電機轉速和力矩的控制。
2 粒子群優化算法
2.1 粒子群優化算法簡述
粒子群算法(particle swarm optimization,PSO)是一種受群體運動啟發的智能算法,最早由KENNEDY J和EBERHART R C提出[15],經過不斷改進變化最終形成了粒子群優化算法,也有簡稱為粒子群算法。
PSO算法的思想來自于自然界群體覓食的行為。在群體尋找食物的過程中,每個個體按照各自隨機的方向搜索,在搜索過程中記錄自己找到最佳位置,同時群體中的每個個體也會共享自己找到最佳位置,因此對于個體而言,搜索方向收到自身歷史的搜索結果和群體中其他個體搜索結果的共同影響。PSO算法被常用來尋找一定區域中函數的最值。
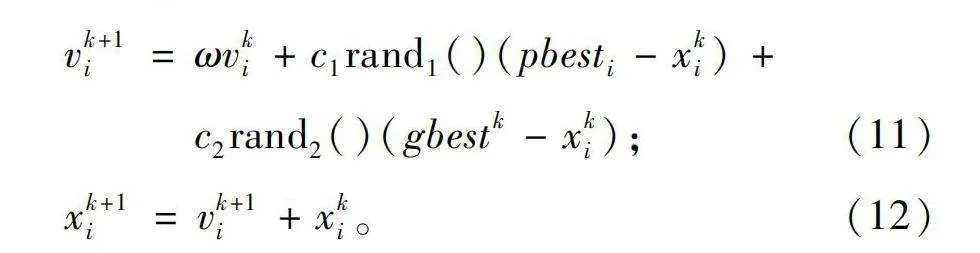
在PSO算法中,每個個體被稱為粒子,每個粒子在D維空間中運動。初始時刻每個粒子隨機均勻分布在有限空間中,并被賦予一個隨機的速度矢量。算法開始后每個粒子的速度和位置按一定規則迭代更新,迭代公式如下:
vk+1i=ωvki+c1rand1()(pbesti-xki)+c2rand2()(gbestk-xki);(11)
xk+1i=vk+1i+xki。(12)
式中:Vki表示第k次迭代中第i個粒子的速度;Xki表示第k次迭代中第i個粒子的位置。pbestk代表第i個粒子迭代開始后找到的最優位置;gbestk為第k次迭代后群體中所有粒子曾經搜索到的最優位置,由每次迭代后各粒子相互交換信息得到。關于最優位置的判定,由適應值函數決定,算法的目的是尋找區域內適應值最大或最小的點,適應值函數與要解決的問題有關,將在第三章中介紹。ω被稱為慣性因子,c1、c2為正值常數。式(11)中還有2個隨機數rand,代表在區間[0,1]上的隨機數,用來增加搜索的隨機性。在算法執行初期,粒子由于初始被賦予隨機的位置和速度會在區域各處搜索,隨后由于某些個體發現了一些較優解開始聚集,最終絕大部分粒子會收斂到一個位置,該位置就是PSO算法得出的區域內的最優解。
2.2 對PSO算法的改進
2.1節所述的PSO算法有一個缺陷:粒子有可能收斂到局部最優解,產生這種問題的原因可能是因為粒子在初期迭代的搜索范圍沒有覆蓋到所有區域,或者粒子在迭代過程中收斂過快,以及PSO算法缺少能“跳出”局部最優解繼續搜索的能力。2.1節所講述的PSO算法中,粒子每次速度迭代公式中的gbest項為所有粒子比較后得到的歷史最優解,可以理解為每個粒子在每次迭代中同時受到其他所有個體的影響,這種模式被稱為全局PSO 算法,這種結構的PSO算法收斂速度最快,同樣也更容易出現收斂到局部最優解的問題。
因此有學者提出改變粒子群的拓撲結構來應對過早收斂的問題,被稱為PSO算法的局部版本相比于全局PSO算法中粒子速度受到所有其他個體的影響,局部PSO算法在速度更新公式中用Lbest代替gbest,即
vk+1i=ωvki+c1rand1()(pbesti-xki)+c2rand2()(Lbestk-xki)。(13)
式中Lbest代表每個粒子的鄰域中的粒子搜索到的最優位置,即每次迭代粒子只與鄰域內的個體交流信息。局部PSO算法中粒子的速度迭代只會被鄰域中的粒子影響,不同拓撲結構中鄰域的粒子數量是變化的。例如最簡單的環形拓撲結構[16],鄰域粒子數量為2,整個拓撲結構為環形,粒子只受左右2個粒子的影響;馮諾依曼拓撲結構的鄰域粒子數量為4,分別位于兩側和頂部底部[17];以及非對稱的拓撲結構等[18]。上述的幾種拓撲結構如圖2所示。以上這些算法只是鄰域構成不同,粒子群的拓撲結構不同,實際上算法原理是相同的。鄰域中粒子的個體數量越多,信息在群體中的傳輸越快,收斂速度越快。
局部PSO算法本質上是減慢了信息在群體中傳遞的速度,降低了收斂速度,讓粒子群體的復雜度在初期保持較高水平,能夠盡可能搜索區域中的所有位置。在圖2中所示的3種拓撲結構中,環形拓撲結構個體間聯系最少信息傳輸最慢,收斂速度最慢[17];馮諾依曼結構和單鏈環結構收斂速度近似,但是馮諾依曼結構算法實現相對簡單。因此綜合收斂速度和算法實現難易度,選擇馮諾依曼結構,該結構中粒子的鄰域中有4個粒子。
3 基于PSO的PID控制器實現
3.1 基于PSO算法的PID控制器實現
在無刷電機控制領域,為了滿足控制的精確度和穩定性,經常用到磁場導向控制技術(field-oriented control,FOC)(又稱矢量控制)。矢量控制的基本思想是將電機三相電流在磁場坐標系下分解,磁場坐標系以轉子磁鏈方向為參考方向。依據這個參考系,將定子電流分解為與轉子磁鏈同方向的定子電流勵磁分量(Id)和與磁鏈方向正交的定子電流轉矩分量(Iq)。這樣就將三相交流電機的電流控制問題轉變為2個獨立軸上的磁場和電流控制問題,控制過程中滿足定子電流勵磁分量(Id)為0,定子電流轉矩分量(Iq)為常數且與轉速正相關。
電機的矢量控制系統中,如果要實現對電機的速度控制,一般采用速度環嵌套電流環的設計方法。電流環是對FOC算法中的電流Id、Iq進行控制,進而控制電機轉矩。電流環的作用在于使電機以最大電流啟動并快速恢復到參考值,加快響應速度,提高系統穩定性。速度環在維持電流參考值的基礎上,控制電機轉速,速度環設計合理的話,可以進一步降低外部擾動對系統的影響,減小轉速波動,輸出穩定的力矩。
從上文中對PSO的算法介紹中,不難看出PSO的目的就是尋找目標函數在一定范圍中的最小值(或最大值)。將這種方法應用在對 BLDC的PID控制器優化中。研究的對象是一個采用矢量控制技術的速度電流雙閉環電機控制系統,如圖3所示。
圖3的控制系統中內環和外環都使用的是PI控制器,使用PI控制器而不是PID控制器的原因是在式(1)中電機模型一般被認為是“電阻+電感”的模型,為了抵消電感的作用,大都使用PI控制器,此外在強調快速動態響應的離散控制系統中,微分環節會放大噪聲,對系統產生負面影響。該系統的內環是電流環,即FOC中經過帕克變換的電流值Id和Iq;外環是速度環,控制電機的轉速。
在該系統中,外環的速度環有一個PI控制模塊,內環電流環有2個PI控制模塊對Id、Iq 2個電流分別進行控制,即共有6個參數需要調節,如果采用手動調整PI參數的方法來優化性能,過程過于繁瑣和重復。因此采用優化PSO算法對控制系統的PI參數進行整定。目的是使用PSO算法找到一組PI參數使電機的性能最優,因此采用在PID控制器設計方法中常見的性能指標:時間加權積分平方誤差(integral time square error,ITSE)[20-23] 作為電機性能的量化參考值,如下式:
ITSE=∫∞0t[r(t)-y(t)]2dt=∫∞0te2(t)dt。(14)
其中e代表目標值與實際值的誤差。ITSE越小,代表電機的速度曲線越符合目標速度曲線,通過PSO算法找到使ITSE為最小值的解,即認為找到電機性能最優的情況,實現對電機控制系統的參數整定。
3.2 算法流程介紹
將內外環的PI參數(共6個)作為粒子的坐標,使粒子群在一個六維空間中進行搜索。PSO算法的實現流程如圖4所示:1)初始化每個粒子的位置和速度,通常粒子的初始速度和初始位置在限定范圍內隨機生成。2)計算每個粒子的適應值(每個粒子的坐標就是一組PI參數,這組參數下電機的性能指標即式(14)的ITSE值為適應值)。3)每個粒子當前搜索到的最優位置稱為個體歷史最優位置(pbest),所有粒子的pbest比較后整個粒子群搜索到的最優位置稱為群體歷史最優位置(gbest)。每次計算適應值后都要更新個體歷史最優位置和群體歷史最優位置。4)如果沒有達到最大迭代次數就繼續下一次迭代。
4 仿真實驗結果和分析
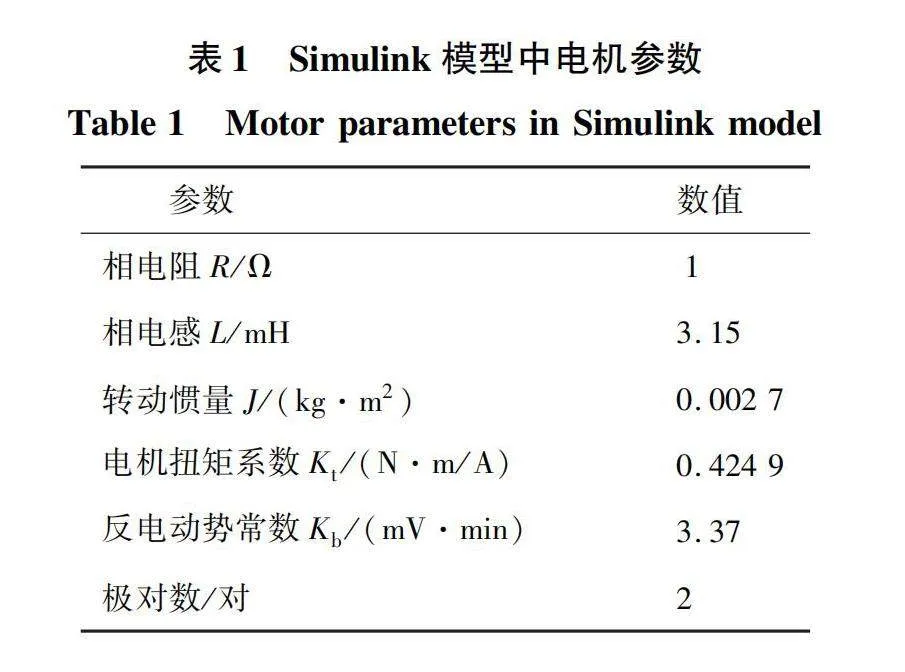
后續實驗以圖3所示的BLDC閉環控制系統Simulink模型為平臺,模型中的電機參數如表1所示,后續實驗所用到的優化PSO算法的相關參數如表2所示。根據圖4的流程執行算法,由電機Simulink模型返回的ITSE指標為參數,進行優化計算,最終得到一組解,即內環和外環PI控制器的參數,再將這組參數帶入模型,得到速度和輸出力矩隨時間的變化情況。
4.1 靜態/動態目標速度值下的速度響應
首先在目標速度為固定值的情況下,對優化PSO算法得到的結果(PSO-PID組)和傳統PID調參方法得到的結果(PID組)進行對比。傳統PID調參采用Ziegler-Nichols方法[24],先打開外環調整內環參數,內環穩定后再調整外環參數,在PI參數確定過程中使用Ziegler-Nichols方法中的臨界比例法。Ziegler-Nichols方法是一種應用在各種工業過程控制系統中的經典調優方法[25],其優點在于只需要找到系統的臨界增益和臨界周期,使用特定的公式可以計算控制器參數,其步驟簡單明了。通常能保證系統在獲得適當響應速度和穩定性之間取得平衡,有助于減少超調和縮短調整時間。最終得到的參數為:速度環P=7,I=20;電流環P=5,I=80。此時目標速度為500 r/min,記錄兩組在0~0.1 s下的速度曲線如圖5所示。
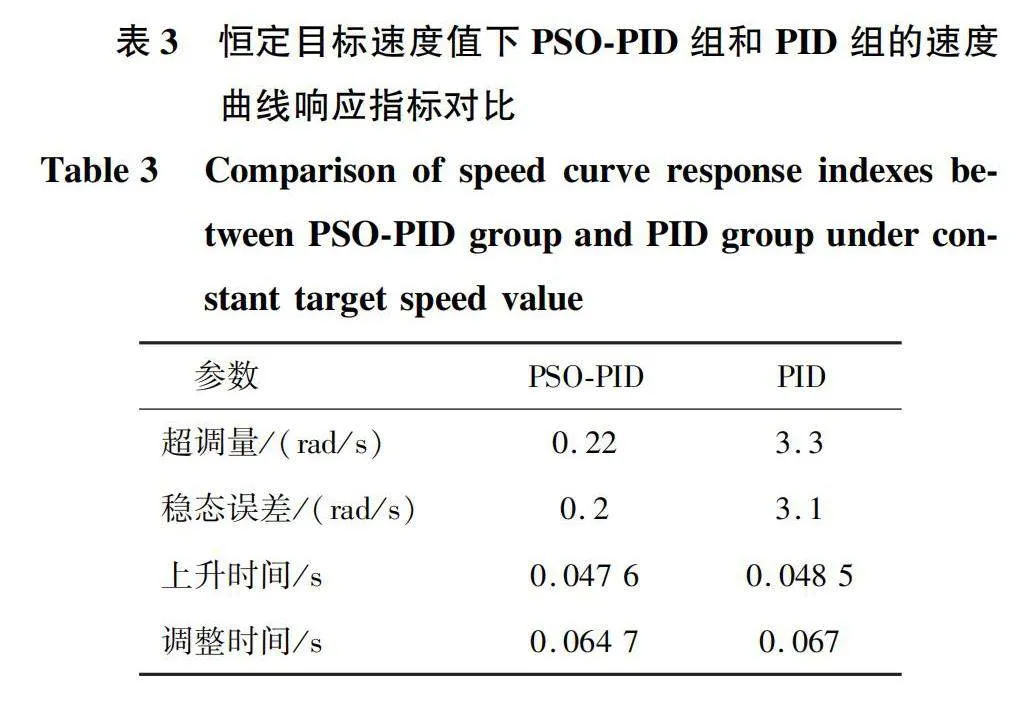
由圖5可以看到,優化PID算法得到的結果有更快的響應速度和更小的穩態誤差,并且在其他方面也優于傳統的PID方法。具體的指標總結如表3所示,總結了兩組速度曲線的超調量、穩態誤差、上升時間和調整時間。其中上升時間為輸出響應達到90%穩態值所對應的時刻,調整時間為輸出響應進入穩態誤差范圍所對應的時刻。
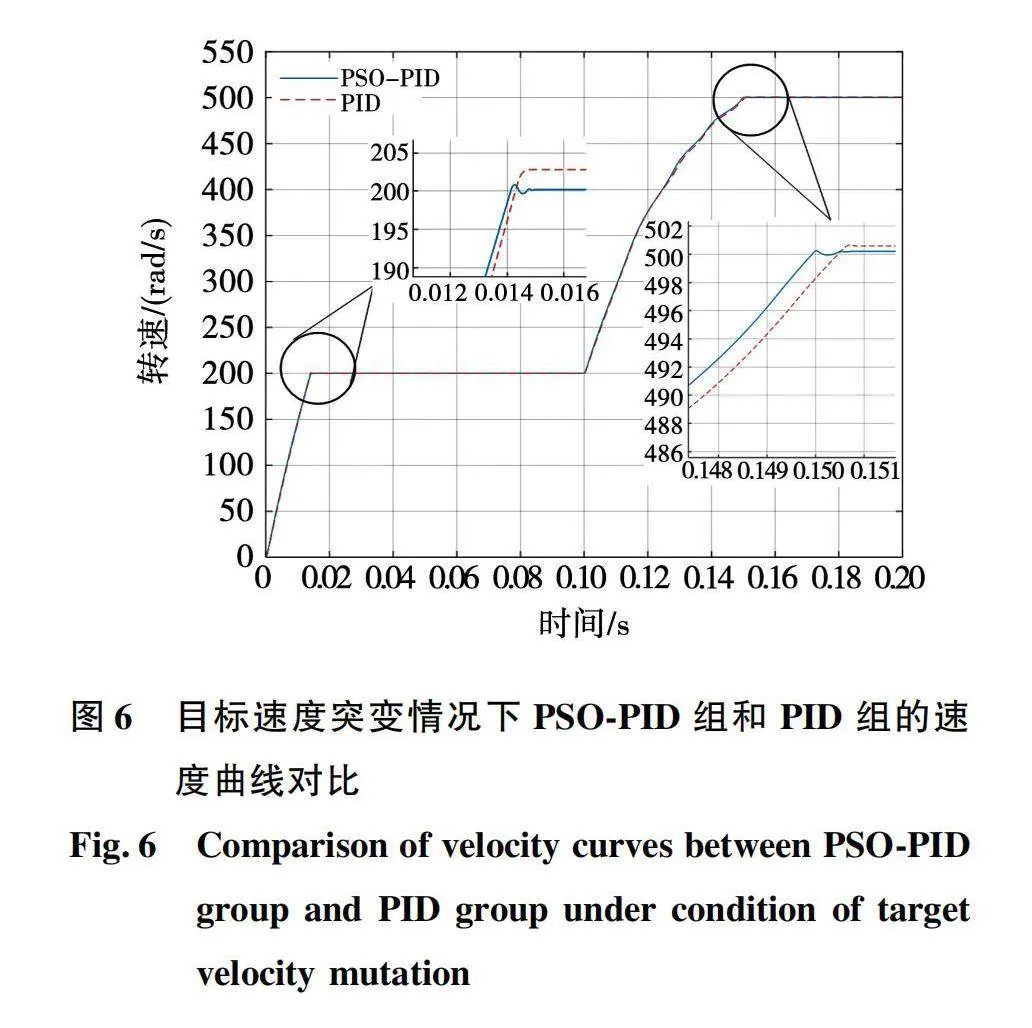
此外還測試了在目標速度發生突變的情況下的電機速度響應。在其他條件相同的情況下,速度參考值在0~0.1 s為200 r/min,在0.1 s時刻突變為500 r/min,記錄優化PSO算法和PID方法兩組在0~0.2 s下轉速的變化情況如圖6所示。
由圖6可以得出,優化PSO算法整定的系統相比傳統PID方法在目標速度的突變下表現出更好的動態響應能力,在仿真剛開始的階段,相比于PID組,PSO-PID組有更小的超調量和穩態誤差,同樣在0.1 s速度參考值發生變化后,PSO-PID組的響應更為迅速,而且超調量和穩態誤差依然優于PID組,反映在優化PSO算法整定下的電機控制系統在動態響應方面更加出色,系統的穩定性更好。
4.2 改進的PSO算法與基本PSO算法比較
2.2節介紹的局部版本的PSO算法相比于基本的PSO算法(稱之為全局PSO算法)能夠有效避免收斂到局部最優解,其原因是局部PSO算法在搜索初期,避免了粒子群的快速收斂使其盡可能遍歷搜索范圍。即保證了粒子群在算法過程中的多樣性,種群多樣性越高,表示粒子散布程度較高,這在搜索初期是有利的。因此將用實驗驗證局部PSO算法的粒子群多樣性高于全局PSO算法,種群多樣性的指標采用J指數[23] 衡量,如下式:
粒子越分散,J指數越大,表示種群的多樣性越高。圖7展示了局部PSO和全局PSO兩種算法在過程中粒子種群多樣性的變化。
從圖7可以看出:初始狀態下由于粒子為隨機分布,此時兩種算法的種群多樣性相近,隨著搜索不斷進行,全局PSO算法多樣性迅速下降,容易出現收斂到局部最優解的情況,PSO算法又缺少從局部最優解中跳出的能力,很容易對最終結果產生影響。局部PSO算法的種群多樣性在前期一直以較慢的速度下降,使粒子群有時間能夠遍歷搜索區域,并且其緩慢平均的收斂速度在一定程度上避免了局部最優解的陷阱。
4.3 不同算法整定結果比較
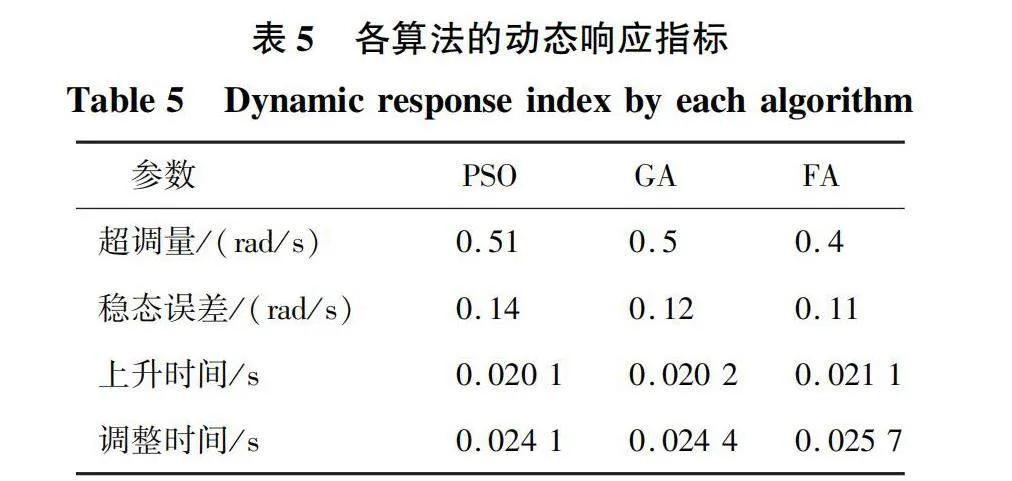
在PID參數自動整定方面,還有其他智能算法的應用。本節將PSO算法和其他智能算法得到的結果進行對比,分析各自的適用領域。各算法運行得到的電機系統PI參數如表4所示,將這些值帶入電機Simulink模型進行仿真,得到電機的速度曲線,并與遺傳算法(genetic algorithm,GA)[26]和螢火蟲算法(firefly algorithm,FA)[12]得到的結果進行比較,結果如圖8所示。
在目標速度恒定的條件下,分別對注入三組參數的電機系統進行仿真,目標速度300 r/min,圖8中展示了優化PSO算法與其他智能算法整定的電機系統速度響應曲線,表5展示了速度動態響應的幾項指標。結果對比可以看出PSO組的響應速度優于GA組和FA組,即對于一個恒定的速度目標值有更快的響應時間。在超調量方面和穩態誤差方面,PSO組和GA組基本相等,FA組的表現略優,有更小的穩態誤差和超調量。不同算法的整定結果各有優缺點,PSO算法整定的系統在系統動態響應方面表現出了優勢,但在特定領域,還要根據問題的性質和需求選擇最合適的優化算法。
4.4 電機輸出力矩表現
除了關注該電機控制系統在速度上的表現,也要關注電機的力矩輸出表現,作為在姿控系統中使用的電機,力矩輸出的精準度和穩定性是影響姿控系統性能的關鍵。通過測量電機在負載恒定和負載突變2種情況下的轉矩脈動情況作為衡量力矩平穩程度的指標。轉矩脈動是指轉矩的最大值與最小值之差與轉矩平均的比值,經常被用來衡量電機轉矩表現,即
圖9展示了在目標轉矩為1 N·m和目標轉速恒定的情況下,采用傳統PID方法和PSO算法整定的電機系統在0.5~0.6 s內力矩輸出情況。其中PID組的平均轉矩為1.024 6 N·m,最大值為1.132 6 N·m,最小值為0.931 6 N·m,轉矩脈動為19.62%;PSO組平均轉矩為1.027 5 N·m,其中最大值為1.130 2 N·m,最小值為0.936 1 N·m,轉矩脈動為18.89%。PSO組相比于PID組輸出轉矩有所減小,穩定性上也有提升,穩態下轉矩脈動下降了0.8%。
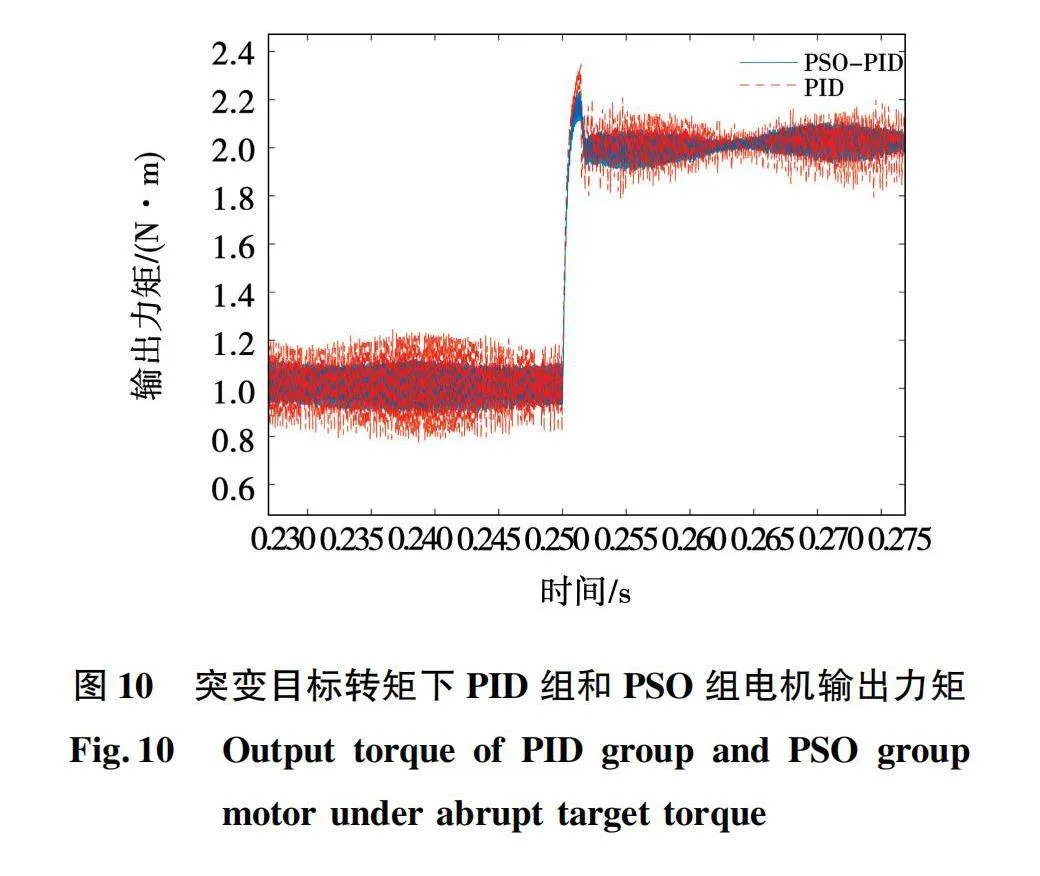
當電機的目標轉矩發生突變時,PID組和PSO組的電機輸出力矩表現如圖10所示,其中目標轉矩在開始時為1 N·m,在0.25 s突變為2 N·m。在0.25 s前,兩組的表現與恒定目標轉矩情況的表現基本一致,但在目標轉矩發生突變后PSO組電機的輸出轉矩能夠更快地調整到目標值附近,并且在穩定后PSO組的電機轉矩峰峰值明顯小于PID組,輸出力矩更平穩,說明PSO算法整定的電機系統對于目標轉矩值突變的情況有更強的適應能力。
在實際的衛星姿控系統中,還有前饋控制算法、角動量約束等方法使電機的控制精確度進一步提高,本節實驗只是對閉環電機控制系統做一個簡要的仿真,雖然在某些方面性能提升的幅度并不明顯,但足以證明結合了PSO算法的PI控制器相比于傳統的PI控制器具有力矩波動小、響應迅速等優點。
4.5 電機參數變化對PSO整定方法的影響
衛星上的電機參數各不相同,當一個電機的PI控制器參數通過PSO算法標定完成后,同類型但參數有變化的電機是否可以使用相同的PI控制器參數進行控制以減小標定次數,本節將通過實驗進行討論。此前的實驗中標定對象為表1所示參數的電機(命名為電機A),將電機A轉動慣量增加10%后的電機命名為電機B,將電機A轉動慣量增加85%的電機命名為電機C。3個電機的控制系統都使用電機A的PI控制器參數進行控制,得到如圖11的速度響應曲線對比。
由圖11所示,電機轉動慣量的增加使電機的速度響應變慢,參數改變幅度越多,電機的速度響應效果越差。轉動慣量增加10%的電機B與電機A的差距并不明顯,但轉動慣量增加85%的電機C與電機A的差距已相當明顯。產生這種差距的原因可能是電機的轉動慣量增加導致電機的“負載”增大影響響應速度,也可能是電機參數變化導致原來整定的結果不適用于新的電機。為了確定哪方面原因影響更多,繼續進行如下實驗:對電機B再次進行整定,整定得到新的PI數值,與采用電機A的PI數值的電機A和電機B進行比較,結果如圖12所示。
可以看出對于電機B重新整定后的結果與采用電機A的PI數值幾乎一致,兩條曲線重合度非常高,可以認為圖11中的偏差是由于轉動慣量的增大引起的影響。在轉動慣量發生10%左右的較小變化后,PSO算法整定的結果依然可以繼續使用并具有較好的性能。
隨后討論電機相電感的改變對注入同一組PI參數的閉環控制系統的影響,圖13中圖例“0”組表示電機A的速度響應曲線,此外圖中還有相電感在電機A的基礎上分別增加20%、40%、80%后的電機速度曲線,目標速度為500 rad/s,從靜止開始增速,圖13展現了其他參數相同情況下不同相電感的電機速度響應曲線。
可以看出,電機相電感的增加導致整個系統的動態響應變慢,穩態誤差增加。原因是電感增大,電機的時間常數增加,影響動態響應,導致上升速率變慢。此外,電流環的控制帶寬會因為電感的增大而減小,電流環對高頻干擾的抑制能力變差,影響整體速度控制的精確性。不過從圖13來看,相電感的變化對整體速度響應曲線的影響比較小,電感增加后的電機仍可以在原參數下的系統快速達到目標速度,PSO算法的結果依然可以使用并得到較好結果。
不過在實際工程應用中,微納衛星上搭載的電機大都用于姿態控制系統或可變形部件,其主要作用是輸出力矩,因此星上同類型電機中不同個體的主要差別體現在電機和帶載物體的轉動慣量上。通過調整電機上攜帶的質量塊的重量和分布可以很容易的改變電機的負載或調整轉子的轉動慣量,而改變其他變量如電機電感、相電阻、反電動常數等需要對電機結構進行改變,實現上較為復雜。
結合以上實驗可以得出:對于同一類型但某些參數有差異的眾多電機可以通過一次標定的方法解決,減小了標定PI參數所需時間和次數。另一方面,可以通過上述實驗確定無刷電機的哪些參數是影響電機性能的關鍵參數,以這些關鍵參數的不同作為指標進行分類標定和重點分析。
5 結 論
針對傳統PID控制器控制無刷電機時系統響應慢、速度波動大和手動調節大規模電機參數繁瑣重復的問題,本文引入了局部版本的PSO算法,以電機的速度誤差累計作為指標,將PSO模型與PI控制器相結合,對無刷電機控制系統的PI參數進行了優化。結果表明:
1)經過優化PSO算法優化的電機控制系統相比于傳統PID控制器速度響應更快,穩態誤差更小,力矩輸出方面更穩定,并且參數整定過程相比于手動調整PID參數更迅速。
2)在本文方法中,電機某些參數的較小改變對電機控制系統的整定結果和系統響應影響很小,因此該整定方法對同類型參數相似的一類電機的PI控制器參數優化有較好效果,可以應用在同類型大批量的電機參數標定中。
該整定方法解決了傳統PID控制器在控制無刷電機中系統響應慢,穩態誤差和超調量大等問題。同時為微納衛星集群中大規模同類型電機調參標定需求提出了一種解決方法。
參 考 文 獻:
[1]CHO M, HIROKAZU M, GRAZIANI F. Introduction to lean satellite and ISO standardfor lean satellite [C]//2015 7th International Conference on Recent Advances in Space Technologies (RAST), June 16-19, 2015, Istanbul, Turkey. 2015: 789-792.
[2]劉林, 曹鑫, 錢夢飛, 等. 永磁同步電機電流環PI控制器參數整定及優化[J].電機與控制學報,2023,27(10):131.
LIU Lin, CAO Xin, QIAN Mengfei, et al. Parameter setting and optimization of current ring PI controller of permanent magnet synchronous motor[J]. Electric Machines and Control, 2023, 27(10): 131.
[3]孫欣, 肖曦, 韓繼文, 等. 基于機械參數辨識的永磁同步電機驅動系統速度環自調試方法[J].電機與控制學報, 2022, 26(12): 1.
SUN Xin, XIAO Xi, HAN Jiwen, et al. Speed loop self-commissioning for permanent magnet synchronous motor drives based on mechanical parameter identification[J]. Electric Machines and Control, 2022, 26(12): 1.
[4]LIAO Wudai, HU Yingyue, WANG Haiquan. Optimization of PID control for DC motor based on artificial bee colony algorithm[C]//Proceedings of the 2014 International Conference on Advanced Mechatronic Systems, August 10-12, 2014, Kumamoto, Japan. 2014: 23-27.
[5]RAHIDEH A, KORAKIANITIS T. Brushless DC motor design using harmony search optimization[C]//The 2nd International Conference on Control, Instrumentation and Automation, December 27-29, 2011,Shiraz, Iran. 2011: 44-50.
[6]ZHANG Jinhua, ZHUANG Jian, DU Haifeng. Self-organizing genetic algorithm based tuning of PID controllers[J]. Information Sciences, 2009, 179(7): 1007.
[7]RAO K S R, OTHMAN A H B. Design optimization of a BLDC motor by genetic algorithm and simulated annealing[C]//2007 International Conference on Intelligent and Advanced Systems, November 25-28, 2007, Kuala Lumpur, Malaysia. 2007: 854-858.
[8]RIDWAN M, RIAWAN D C, SURYOATMOJO H. Particle swarm optimization-based BLDC motor speed controller with response speed consideration[C]//2017 International Seminar on Intelligent Technology and Its Applications (ISITIA), August 28-29, 2017, Surabaya, Indonesia. 2017: 193-198.
[9]邊琦, 馬建, 張夢寒, 等. 改進細菌覓食算法的永磁同步電機參數辨識[J]. 電機與控制學報, 2024, 28(2):174.
BIAN Qi, MA Jian, ZHANG Menghan, et al. Parameter identification of permanent magnet synchronous motor based on modified bacterial foraging algorithm[J]. Electric Machines and Control, 2024, 28(2): 174.
[10]CHIHA I, LIOUANE N, BORNE P. Tuning PID controller using multiobjective ant colony optimization[J]. Applied Computational Intelligence and Soft Computing, 2012, 2012: 11.
[11]SHI Jun, MI Qingtao, CAO Weifeng, et al. Optimizing BLDC motor drive performance using particle swarm algorithm-tuned fuzzy logic controller[J]. SN Applied Sciences, 2022, 4(11): 293.
[12]BAZI S, BENZID R, BAZI Y, et al. A fast firefly algorithm for function optimization: application to the control of BLDC motor[J]. Sensors, 2021, 21(16): 5267.
[13]WANG Tingting, WANG Hongzhi, WANG Chuhang, et al. A novel PID controller for BLDCM speed control using dual fuzzy logic systems with HSA optimization[J]. Scientific Reports, 2022, 12(1): 11316.
[14]MILANI M M R A, ?AVDAR T, AGHJEHKAND V F. Particle swarm optimization—based determination of Ziegler-Nichols parameters for PID controller of brushless DC motors[C]//2012 International Symposium on Innovations in Intelligent Systems and Applications, July 2-4, 2012, Trabzon, Turkey. 2012: 1-5.
[15]KENNEDY J. The particle swarm: social adaptation of knowledge[C]//Proceedings of 1997 IEEE International Conference on Evolutionary Computation (ICEC'97), April 13-16, 1997, Indianapolis, IN, USA. 1997: 303-308.
[16]KENNEDY J, MENDES R. Neighborhood topologies in fully informed and best-of-neighborhood particle swarms[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 2006, 36(4): 515.
[17]KENNEDY J, MENDES R. Population structure and particle swarm performance[C]//Proceedings of the 2002 Congress on Evolutionary Computation (CEC’02), May 12-17, 2002, Honolulu, HI, USA. 2002, 2: 1671-1676.
[18]MUOZ ZAVALA A E, HERNNDEZ AGUIRRE A, VILLA DIHARCE E R. The singly-linked ring topology for the particle swarm optimization algorithm[C]//Proceedings of the 11th Annual Conference on Genetic and Evolutionary Computation, July 8-12, 2009, Montreal, Québec, Canada. 2009: 65-72.
[19]MUOZ ZAVALA A E. A comparison study of PSO neighborhoods[M]. Berlin, Heidelberg:Springer Berlin Heidelberg, 2013: 251-265.
[20]KROHLING R A, REY J P. Design of optimal disturbance rejection PID controllers using genetic algorithms[J]. IEEE Transactions on Evolutionary Computation, 2001, 5(1): 78.
[21]MITSUKURA Y, YAMAMOTO T, KANEDA M. A design of self-tuning PID controllers using a genetic algorithm[C]//Proceedings of the 1999 American Control Conference, June 2-4, 1999, San Diego, CA, USA. 1999: 1361-1365.
[22]KROHLING R A, JASCHEK H, REY J P. Designing PI/PID controllers for a motion control system based on genetic algorithms[C]//Proceedings of 12th IEEE International Symposium on Intelligent Control, July 16-18, 1997, Istanbul, Turkey. 1997: 125-130.
[23]ZHOU Dawei, GAO Xiang, LIU Guohai, et al. Randomization in particle swarm optimization for global search ability[J]. Expert Systems with Applications, 2011, 38(12): 15356.
[24]ASTROM K J, HAGGLUND T. Revisiting the Ziegler—Nichols step response method for PID control[J]. Journal of Process Control, 2004, 14(6): 635.
[25]LIU Yuqi, HUANG Yuanfeng, XIONG Bin, et al. Speed balance control of the dual-motor system based on three-vector model prediction[C]//International Conference on Electrical and Information Technologies for Rail Transportation, October 19-21, 2023, Beijing, China. 2023: 404-412.
[26]LIN Chunliang, JAN H Y, SHIEH N C. GA-based multiobjective PID control for a linear brushless DC motor[J]. IEEE/ASME Transactions on Mechatronics, 2003, 8(1): 56.
(編輯:劉琳琳)