
不同地形中GNSS輔助空三實景三維建模精度分析
2024-12-06 00:00:00楊忠凱何響世李昌凱
中國新技術(shù)新產(chǎn)品 2024年21期
關(guān)鍵詞:無人機












摘 要:對無人機傾斜攝影實景進行三維建模,常見的地形主要包括平坦地、丘陵地和山地,規(guī)范對這3種地形的精度要求是不同的。目前實景三維建模的構(gòu)建主要包括基于像控點和基于GNSS輔助空中三角測量的方法,當采用GNSS輔助空三測量時,POS數(shù)據(jù)的精度是影響最終成果精度的關(guān)鍵因素。利用PPK和網(wǎng)絡(luò)RTK融合處理可以提高POS數(shù)據(jù)可靠性和精度,在不同的地形類別的三維建模中對該方法進行驗證,結(jié)果表明,采用PPK和網(wǎng)絡(luò)RTK融合處理后,在不同的地形中,實景三維模型的精度相當,并均能滿足規(guī)范要求。
關(guān)鍵詞:無人機;傾斜攝影;實景三維建模;GNSS
中圖分類號:TP 391" " " " " " 文獻標志碼:A
與傳統(tǒng)航測相比,無人機航測技術(shù)具有便捷、高效以及成本較低的特點,因此在規(guī)劃設(shè)計[1]、工程建設(shè)[2]、不動產(chǎn)測繪[3]、數(shù)字城市建設(shè)[4]以及礦山治理[5]等現(xiàn)代化的測繪工作中得到廣泛應用。在以上不同領(lǐng)域中應用涉及無人機航測的一個重要方面,即無人機傾斜攝影實景三維建模。在專業(yè)航測無人機中有慣性測量系統(tǒng)(Inertial Measurement Unit,IMU)和差分全球定位系統(tǒng)(Differential Global Position System,DGP)集成的無人機定向系統(tǒng),即POS(Position Orientation System,POS)。POS利用姿態(tài)測量系統(tǒng)(Inertial Navigation System,INS)和機載GNSS全球衛(wèi)星導航系統(tǒng)(Global Navigation Satellite System,GNSS)得到像片的6個外方位元素(3個直線元素,即攝影中心在選定坐標系的坐標值;3個角元素,描述像片的空間姿態(tài))。三維建模軟件基于POS數(shù)據(jù)以GNSS輔助空中三角測量(簡稱“空三”)的方式,結(jié)合航攝影像完成三維模型構(gòu)建。無人機傾斜攝影往往要面對不同類型的地形,通常情況下主要包括平坦地、丘陵地和山地,規(guī)范對這3類地形的精度限差要求是不同的,只有保證 POS 數(shù)據(jù)的精度和可靠性,才能保證在不同的地形類別中精度限差均能滿足規(guī)范要求。
1 GNSS輔助空三測量實景三維建模
無人機傾斜攝影實景三維建模結(jié)合虛擬現(xiàn)實技術(shù)和三維可視化技術(shù),使用無人機搭載專業(yè)的航攝相機,從空中以不同角度對地表拍攝若干影像,利用這些航攝影像進行攝影測量,構(gòu)建三維模型。采用這種方式構(gòu)建的三維模型具備真實紋理和貼近現(xiàn)實的地形地物結(jié)構(gòu),因此稱為實景三維模型。其基本原理是基于傳統(tǒng)攝影測量的共線方程經(jīng)過像對選取、密集點云匹配、三角網(wǎng)構(gòu)建、紋理映射、模型存儲和命名等過程,最終構(gòu)建三維模型。
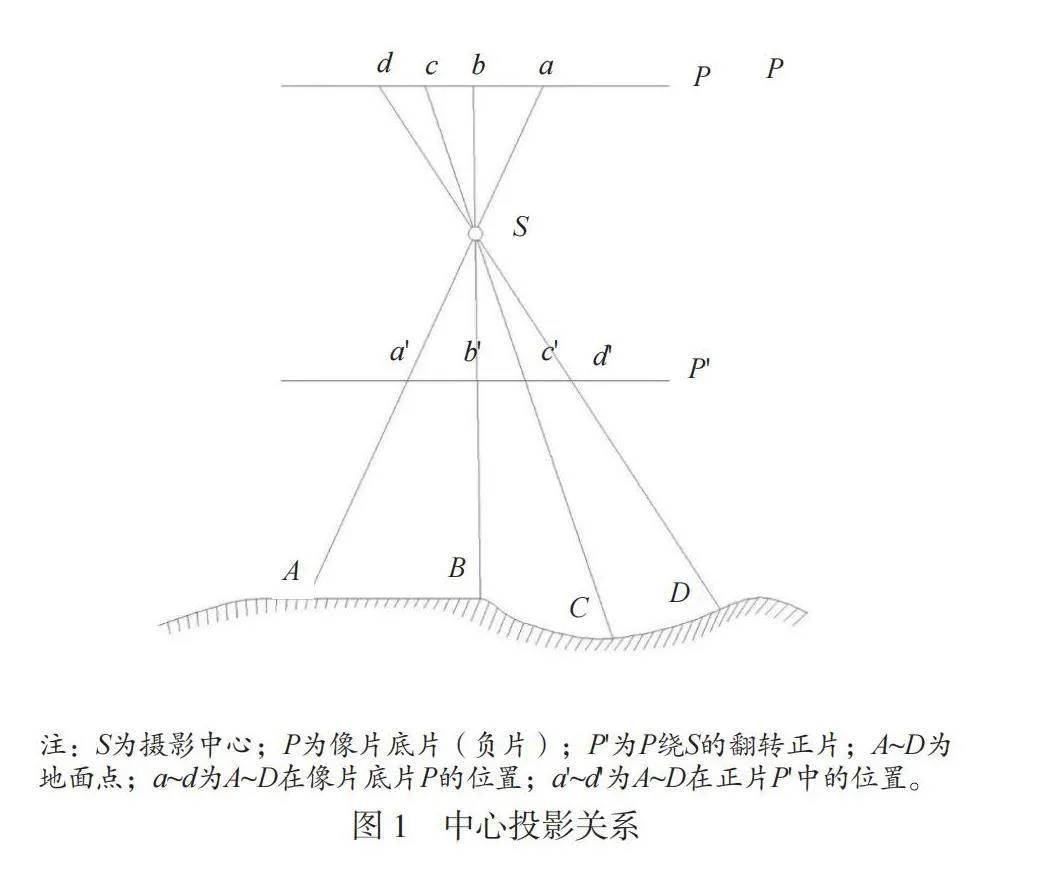
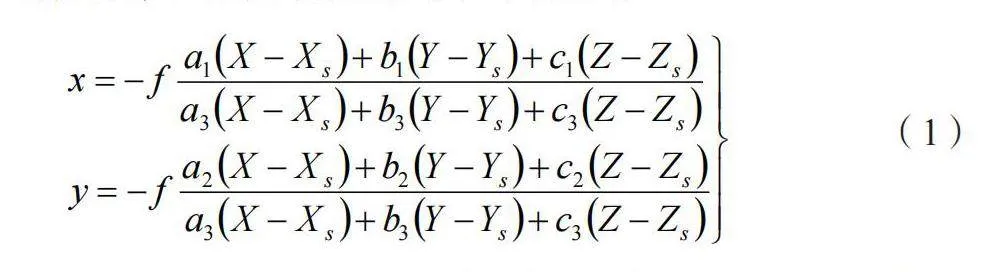
在傳統(tǒng)的攝影測量中,當航攝相機拍攝影像時,地面光線經(jīng)過物鏡后在底片中成像,獲得航攝像片。此時物鏡中心為投影中心,底片為投影面,數(shù)字航攝與其類似。由于地面點的光線匯聚于物鏡中心,因此航攝像片是地面的中心投影,其關(guān)系如圖1所示。共線方程即中心投影的構(gòu)像方程,其表述的是像點a、攝影中心S與地面點A的相互關(guān)系,即三點共線,共線方程如公式(1)所示。
(1)
式中:x、y為以像主點為原點的像點坐標;f為像片主距;ai、bi和ci(i=1,2,3)為3個外方位角元素的方向余弦;X、Y和Z為地面點A的坐標;Xs、Ys和Zs為地面攝影測量坐標系中攝影中心S的坐標。
攝影測量的基本原理是攝影光束相交獲取地面點的點位,這個過程需要利用像片的6個外方位元素構(gòu)建共線方程,計算地面點坐標。傳統(tǒng)攝影測量利用外業(yè)測量的像片控制點,采用解析空三測量的方法獲取像片的外方位元素。無人機的POS系統(tǒng)可以直接獲取航攝瞬間像片的全部6個外方位元素,即理論上不需要布設(shè)像控點。GNSS相位中心與其在像方坐標系中的坐標的關(guān)系如公式(2)所示。
(2)
式中:XA、YA和ZA為機載GNSS相位中心在大地坐標系中的坐標;XS、YS和ZS為航攝儀投影中心坐標;R為方向余弦組成的3×3正交旋轉(zhuǎn)矩陣;u、v和w為GNSS相位中心在像方坐標系的坐標。
INS測定的相機姿態(tài)角與外方位角元素的關(guān)系如公式(3)所示。
(3)
式中:φ、ω和κ為INS系統(tǒng)測定的相機姿態(tài)角。
公式(1)~公式(3)構(gòu)成了影像的外方位元素和定向參數(shù)的關(guān)系,也是GNSS輔助空三實景三維建模的基礎(chǔ)。基于以上關(guān)系,利用POS系統(tǒng)的觀測值構(gòu)建誤差方程,采用最小二乘法求解點的三維坐標和外方位元素平差值,最終完成GNSS輔助空三測量實景三維建模[6]。
2 PPK與網(wǎng)絡(luò)RTK融合處理技術(shù)
由無人機POS系統(tǒng)的組成可知,其在測定像片的外方位元素的過程中,角元素由INS系統(tǒng)測量,其精度由INS系統(tǒng)本身決定。線元素由GNSS系統(tǒng)測量,其精度與觀測方式和觀測條件有統(tǒng)計學意義,通常可以采用2種方法,即動態(tài)后處理(Post Processed Kinematic,PPK)和實時動態(tài)差分(Real Time Kinematic,RTK)。這2種方法的基本原理一致,在已知點位置架設(shè)GNSS基準站,與流動站一起進行GNSS觀測,利用已知點計算誤差改正數(shù),利用數(shù)據(jù)通信鏈路將誤差改正數(shù)發(fā)給流動站,可以大幅提高定位精度,區(qū)別是RTK的這個過程是實時的,PPK的這個過程是事后的。其改正數(shù)的表達式如公式(4)所示。
(4)
式中:V為差分改正數(shù);ti為歷元時刻;Δt為時延;V(ti+Δt)為顧及Δt的差分改正數(shù);V(ti)為當歷元為ti時的差分改正數(shù);Δt為時延。
網(wǎng)絡(luò) RTK 技術(shù)是一種新的RTK定位技術(shù),出現(xiàn)于20世紀 90 年代,并從2010年左右開始快速發(fā)展,其以CORS系統(tǒng)(Continuously Operating Reference Stations,CORS)為核心,根據(jù)區(qū)域基準站網(wǎng)的觀測值,利用網(wǎng)絡(luò)的數(shù)據(jù)通信鏈路實時播發(fā)改正信息。PPK的優(yōu)點是受地形限制較小,定位精度高。缺點是必須經(jīng)過事后處理,無法實時定位,在地形有遮擋的區(qū)域,會受網(wǎng)絡(luò)信號強度的影響,有較高概率出現(xiàn)流動站與基準站斷連導致定位丟失的情況。當采用網(wǎng)絡(luò)RTK技術(shù)進行觀測時,在區(qū)域基準站網(wǎng)中其改正數(shù)的計算(最小方差法)過程如公式(5)所示。
Vu=P1V1+P2V2+P3V3+…+PnVn" " (5)
式中:Vu為總改正數(shù);Pn為基準站的權(quán);Vn為第n個基準站的改正數(shù)。
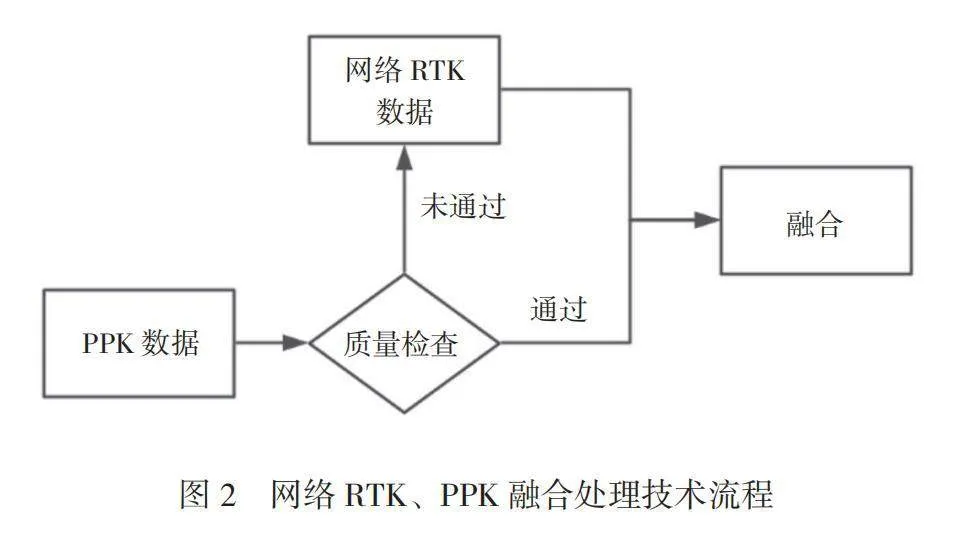
綜合網(wǎng)絡(luò)RTK和PPK的優(yōu)缺點,將兩者的數(shù)據(jù)進行融合處理,其具體操作方法有以下2種。1)地面架設(shè)GNSS靜態(tài)觀測基準站,在無人機飛行全過程中保持靜態(tài)觀測,事后結(jié)合無人機的機載觀測數(shù)據(jù)和地面靜態(tài)觀測數(shù)據(jù)將機載觀測數(shù)據(jù)進行解算,得到相對于地面基準站的高精度位置信息。2)無人機利用移動網(wǎng)絡(luò)接入CORS賬號,獲得網(wǎng)絡(luò)RTK定位服務,任務結(jié)束后將PPK數(shù)據(jù)和網(wǎng)絡(luò)RTK數(shù)據(jù)進行融合,保留兩者中觀測精度較高的數(shù)據(jù),數(shù)據(jù)取舍原則如下:優(yōu)先使用PPK數(shù)據(jù),如果PPK數(shù)據(jù)質(zhì)量不佳,那么采用網(wǎng)絡(luò)RTK數(shù)據(jù),其技術(shù)流程如圖2所示。采用這種方式處理的POS數(shù)據(jù)精度高,可靠性強[7-10]。在通常情況下,大部分PPK數(shù)據(jù)和網(wǎng)絡(luò)RTK數(shù)據(jù)質(zhì)量較高,將兩者進行融合處理并比較其坐標值,排除觀測中可能出現(xiàn)的粗差。
3 技術(shù)路線
當分析在不同地形中實景三維模型的精度時,為得到可靠的結(jié)論,制定的技術(shù)路線須排除外界因素導致的系統(tǒng)誤差,包括以下5個步驟。1)選定測區(qū)。測區(qū)要求具有不同的地形類別,包括平坦地、丘陵地和山地,測區(qū)面積盡量保持一致。2)無人機航飛。當航飛時采用相同的飛行參數(shù)。3)POS數(shù)據(jù)處理。采用網(wǎng)絡(luò)RTK、PPK融合處理。4)三維建模。在相同的軟件中,采用相同的方法進行三維建模。5)利用實測檢查點檢查三維模型精度。
根據(jù)以上要求,最終選取3個地形具有不同代表性的測區(qū),測區(qū)面積均在1 km2左右,地形包括平坦地、丘陵地和山地,這3種地形的地面傾角α為平坦地:α<2°;丘陵地:2°≤α<6°;山地:6°≤α<25°。測區(qū)情況統(tǒng)計見表1。選擇飛馬D2000多旋翼無人機搭載OP3000傾斜攝影模塊來采集航攝影像。OP3000傾斜攝影模塊共搭載了5個鏡頭,影像傳感器中單位像元的物理寬度和高度都為 3.9 μm,包括1個下視鏡頭和4個傾斜鏡頭;在航線設(shè)計方面,決定采集測區(qū)分辨率優(yōu)于5 cm的航攝影像,航高為300 m;在航飛完成后,在Context Capture Center軟件中進行三維建模。精度驗證的方法:在測區(qū)內(nèi)布設(shè)覆蓋整個測區(qū)的檢查點,當利用檢查點進行測量時,檢查點的平面和高程中誤差均不大于5cm。檢查點的布設(shè)樣式如圖3所示。
4 作業(yè)過程
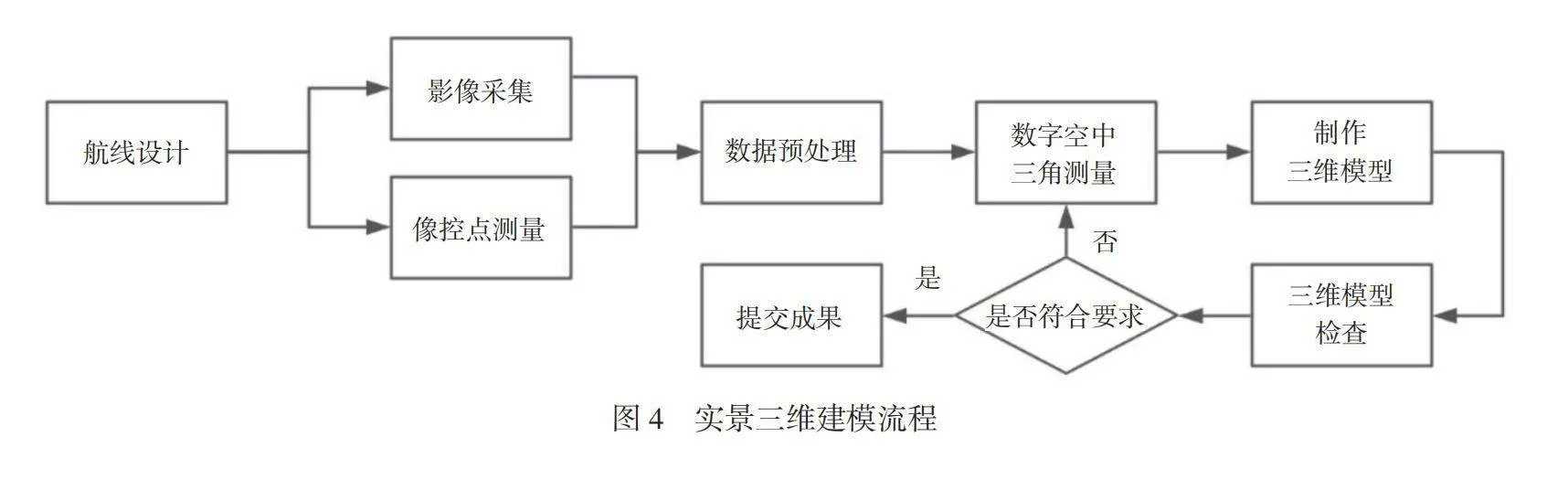
4.1 實景三維建模流程
實景三維建模有以下7個流程。1)現(xiàn)場踏勘,選擇起降場地和航線優(yōu)化。2)像控點和檢查點測量,如果采取免像控的方式,那么不需要測量像控點,檢查點要求覆蓋整個測區(qū)。3)無人機航飛。4)POS數(shù)據(jù)解算、坐標轉(zhuǎn)換以及影像預處理。5)數(shù)字空中三角測量。6)三維模型構(gòu)建。7)三維模型質(zhì)量檢查,包括三維模型整體外觀質(zhì)量檢查、結(jié)構(gòu)檢查和精度檢查等,滿足相關(guān)要求后,進行模型整飾,提交成果。實景三維建模流程如圖4所示。
4.2 無人機航飛和數(shù)據(jù)處理
為了在飛行的過程中盡可能地提高其定位精度,降低無人機當按照預設(shè)航線飛行時的偏差,飛行前須將無人機接入移動網(wǎng)絡(luò)連接CORS賬號,等待網(wǎng)絡(luò)RTK定位成功,以保證無人機在飛行和起降過程中均具有厘米級的定位,提高飛行安全性。
在數(shù)據(jù)處理軟件中輸入地面靜態(tài)觀測站的經(jīng)緯度和觀測點的儀器垂高等信息,分別導入無人機機載GNSS觀測數(shù)據(jù)和靜態(tài)GNSS觀測數(shù)據(jù),分別進行PPK和網(wǎng)絡(luò)RTK的POS數(shù)據(jù)處理,最終將2種數(shù)據(jù)進行融合處理。經(jīng)過檢查,3個測區(qū)的POS數(shù)據(jù)經(jīng)融合處理后固定率均達到100%,即所有的POS數(shù)據(jù)均達到厘米級的精度。3個測區(qū)分別獲取了1 825張、1 655張和1 850張高分辨率影像,影像質(zhì)量滿足三維建模的基本要求。
4.3 三維建模
采用Smart3D和ContextCapture Center軟件進行三維建模,ContextCapture Center軟件具有很高的空三處理精度,并且在空三過程中會進行全場景整體勻色處理,模型觀感較好。三維建模的處理方案:先在Smart3D軟件中進行一次自由網(wǎng)空三處理,這次空三處理的目的是保證航攝影像具有足夠的入網(wǎng)率,不要求具有較高的精度,可以選擇剛體自由變換的模式,然后將空三結(jié)果導出為*.xml交換格式,再在ContextCapture Center軟件中導入Smart3D的空三結(jié)果,基于POS數(shù)據(jù)重新進行空三測量和平差調(diào)整,以提高空三成果精度。在空三處理的過程中導入檢查點進行精度檢查,經(jīng)檢查點檢查,3個測區(qū)的空三精度均滿足《數(shù)字航空攝影測量 空中三角測量規(guī)范》(GB/T 23236—2009)的要求。空三精度統(tǒng)計見表2。
空三完成后,由軟件自動化處理三維建模的過程。建模后進行質(zhì)量檢查,3個測區(qū)的三維模型結(jié)構(gòu)關(guān)系正確,色彩貼近實際,明暗反差適中,各測區(qū)內(nèi)不同區(qū)域的細節(jié)保存完好,整體模型質(zhì)量較好。各測區(qū)三維模型效果如圖5~圖7所示。
5 三維模型精度統(tǒng)計
將檢查點導入三維模型中,比較平面和高程差值來統(tǒng)計精度,檢查點完整覆蓋測區(qū)的各個區(qū)域。采用《測繪成果質(zhì)量檢查與驗收》(GB/T 34256—2023)中同精度檢測的方式計算中誤差,如公式(6)所示。
(6)
式中:M為中誤差;n為檢查點數(shù)量;Δi為檢查點較差。
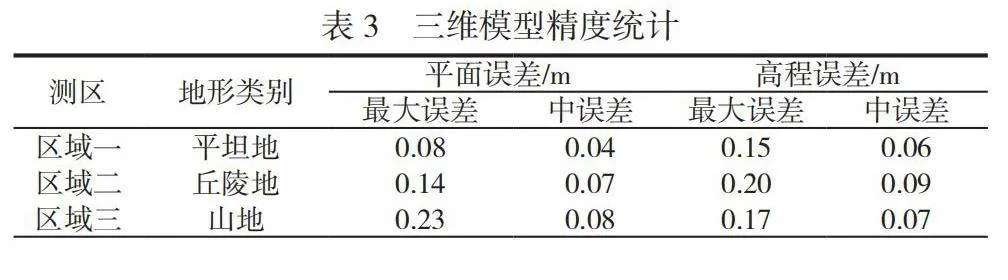
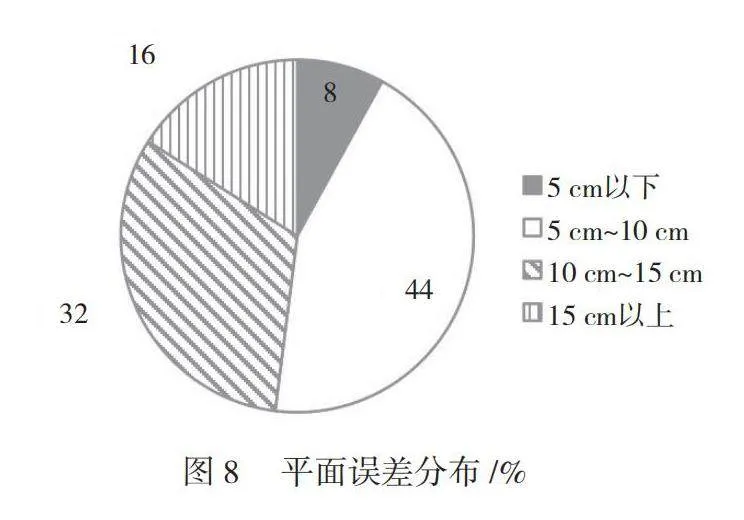
三維模型精度統(tǒng)計見表3,分測區(qū)統(tǒng)計中誤差,判斷不同類別地形對精度的影響。利用餅狀圖匯總統(tǒng)計大小不同的誤差的占比,判斷誤差的分布關(guān)系。平面誤差分布如圖8所示,高程誤差分布如圖9所示。
各測區(qū)內(nèi)的平面和高程精度基本相當,中誤差均滿足規(guī)范要求,平坦地的精度稍高于丘陵地和山地。根據(jù)《三維地理信息模型數(shù)據(jù)產(chǎn)品規(guī)范》(CH/T 9015—2012)中I級1∶500成圖比例尺模型的誤差限差:平面中誤差≤0.3 m,高程中誤差≤0.5 m,在不同地形條件下均滿足規(guī)范要求。經(jīng)過精度統(tǒng)計,平面誤差和高程誤差的大小分布比較集中,超過80%的點的平面和高程誤差在15 cm(3倍地面分辨率)以內(nèi)。
6 結(jié)語
當進行無人機傾斜攝影實景三維建模時,采用網(wǎng)絡(luò)RTK和PPK融合的方式對POS數(shù)據(jù)進行處理,可以保證POS數(shù)據(jù)的精度,進而保證空三處理的精度,最終可以構(gòu)建基于GNSS輔助定位的免像控高精度三維模型。采取這種方式對無人機POS數(shù)據(jù)進行處理后,在分辨率一定的情況下,雖然不同類別地形的三維模型精度有一些差異,但是綜合比較平面和高程精度,總的來說其仍然在同一個等級,地形類別對三維模型的總體精度影響不大,并均能滿足規(guī)范要求。
參考文獻
[1]楊銘.新型測繪技術(shù)在道路竣工規(guī)劃驗收測量中的應用研究[J].測繪通報,2019(增刊2):226-229,234.
[2]范煒,朱燁,王會影,等.基于實景三維的建設(shè)工程規(guī)劃設(shè)計方案輔助構(gòu)建及審查[J].自然資源信息化,2023(6):13-18,31.
[3]趙永志.無人機傾斜攝影測量在農(nóng)村房地一體中的應用研究[J].現(xiàn)代信息科技,2023,7(13):122-125.
[4]鐘亮,趙勝治,陳彥志.無人機傾斜攝影測量在數(shù)字城市建設(shè)中的應用[J].測繪與空間地理信息,2023,46(9):202-204,208.
[5]閆宏昌.無人機低空攝影測量在礦山治理中的應用研究[J].測繪與空間地理信息,2024,47(4):62-64.
[6]張林杰,黃筱,饒維冬,等.網(wǎng)絡(luò)RTK和PPK輔助水利工程免像控無人機傾斜攝影測量三維建模分析[J].測繪通報,2023(4):115-120.
[7]錢俊錦.無人機在高山區(qū)免像控三維建模航測方法研究[J].中國新技術(shù)新產(chǎn)品,2021(3):7-9.
[8]任智龍,李風賢,柴生亮,等.RTK和PPK融合差分技術(shù)的無人機攝影測量免像控測圖精度實證[J].北京測繪,2022,36(9):1225-1230.
[9]胡玉祥,尹相寶,張洪德,等.GNSS PPK動態(tài)后處理測量作業(yè)模式與應用分析[J].測繪與空間地理信息,2022,45(11):65-66,70.
[10]田慧,宋中華.PPK和GPS-RTK在黃河三角洲海區(qū)測驗中的數(shù)據(jù)對比分析[J].東北水利水電,2020,3(11):26-27,29.
猜你喜歡
電腦知識與技術(shù)(2016年28期)2016-12-21 12:21:32
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農(nóng)機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業(yè)導報(2016年9期)2016-05-26 20:58:26
