瀝青路面智能攤鋪碾壓技術(shù)的應(yīng)用分析
2024-12-26 00:00:00王超
交通科技與管理 2024年22期
關(guān)鍵詞:施工




摘要 為研究瀝青路面智能攤鋪碾壓技術(shù),基于對(duì)智能攤鋪碾壓技術(shù)原理分析,文章依托工程案例,開展了無人集群施工方案和主控項(xiàng)目的分析,并對(duì)施工質(zhì)量進(jìn)行了檢測(cè)。結(jié)果表明,無人駕駛壓實(shí)技術(shù)通過高精度控制和智能化操作,顯著提高了路面施工的均勻性,同時(shí)將精度偏差嚴(yán)格控制在2~3 cm,安全制動(dòng)距離縮短至毫秒級(jí),節(jié)約成本約10萬元,為項(xiàng)目帶來了顯著的經(jīng)濟(jì)效益。
關(guān)鍵詞 道路工程;智能攤鋪碾壓;無人集群;施工
中圖分類號(hào) U416 文獻(xiàn)標(biāo)識(shí)碼 A 文章編號(hào) 2096-8949(2024)22-0160-03
0 引言
隨著交通運(yùn)輸事業(yè)的快速發(fā)展,瀝青路面作為高速公路、城市道路等基礎(chǔ)設(shè)施的重要組成部分,其建設(shè)質(zhì)量直接關(guān)系交通安全。但由于傳統(tǒng)攤鋪碾壓技術(shù)存在施工質(zhì)量不穩(wěn)定、施工效率低等問題,難以滿足現(xiàn)代交通建設(shè)需求。近年來,隨著物聯(lián)網(wǎng)、GPS等智能技術(shù)的飛速發(fā)展,瀝青路面智能攤鋪碾壓技術(shù)應(yīng)運(yùn)而生,為瀝青路面施工提供了全新的解決方案。智能攤鋪碾壓技術(shù)通過集成傳感器、控制系統(tǒng)、數(shù)據(jù)分析等先進(jìn)技術(shù),實(shí)現(xiàn)了對(duì)攤鋪碾壓過程的精確控制和智能化管理。因此,該文通過對(duì)瀝青路面智能攤鋪碾壓技術(shù)原理進(jìn)行分析,基于工程案例對(duì)其在實(shí)際工程中的應(yīng)用效果進(jìn)行評(píng)價(jià),為推動(dòng)瀝青路面施工技術(shù)的創(chuàng)新和發(fā)展提供參考。
1 瀝青路面智能攤鋪碾壓技術(shù)原理
1.1 智能攤鋪碾壓控制系統(tǒng)
瀝青路面智能攤鋪碾壓控制系統(tǒng)融合了無人駕駛、智能數(shù)據(jù)采集與傳輸、5G通訊、微波通訊、衛(wèi)星定位和碾壓控制程序等多個(gè)技術(shù)。智能攤鋪機(jī)通過精確采集施工軌跡,并通過微波通信技術(shù)將數(shù)據(jù)實(shí)時(shí)傳輸至移動(dòng)式5G通信基站系統(tǒng),利用5G網(wǎng)絡(luò)的高速度、低延遲特性,再將數(shù)據(jù)快速傳送到中央控制系統(tǒng)(電腦)[1]。
1.2 移動(dòng)式5G通訊基準(zhǔn)站系統(tǒng)
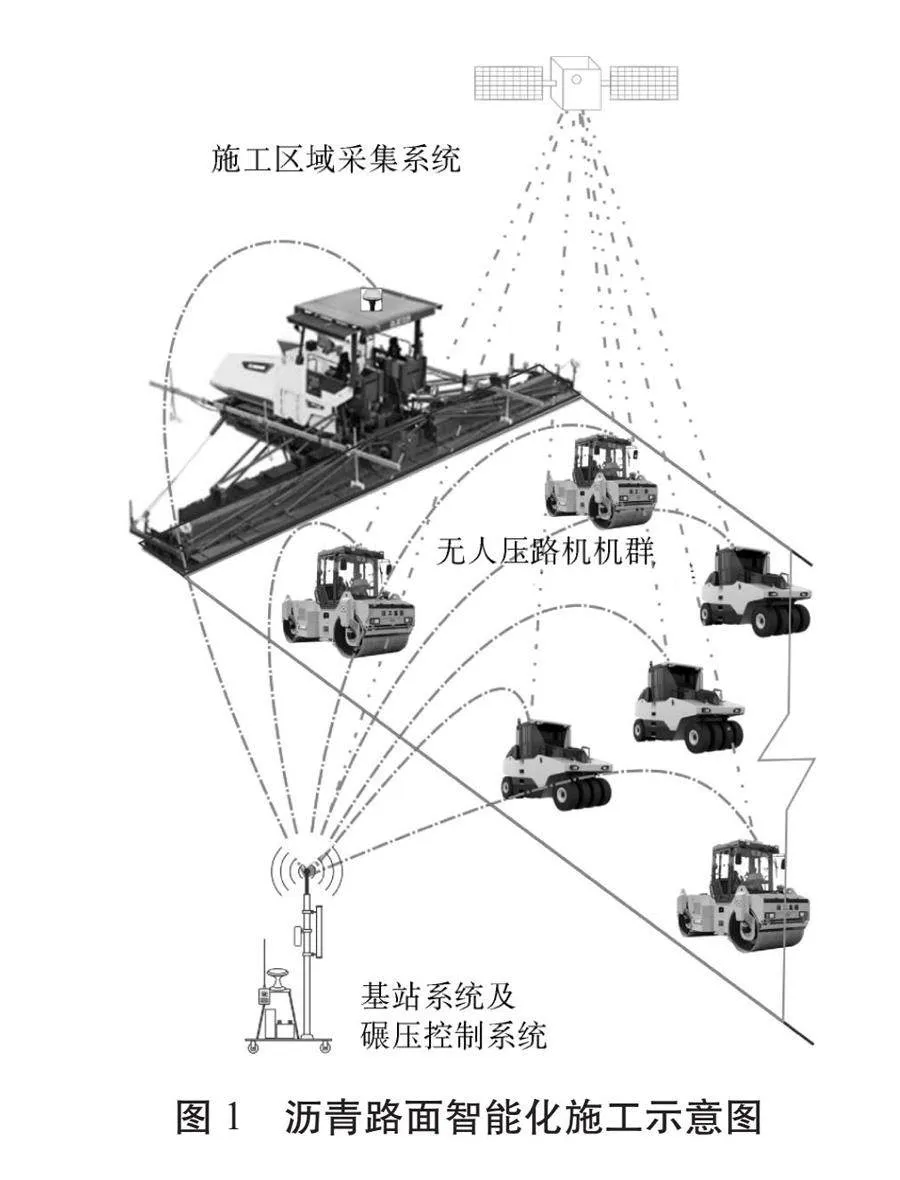
移動(dòng)式5G通訊基準(zhǔn)站系統(tǒng)可為無人集群施工提供穩(wěn)定、高效的通訊和定位服務(wù),實(shí)現(xiàn)各個(gè)施工機(jī)械之間的協(xié)同作業(yè),同時(shí)為施工人員提供施工過程中的遠(yuǎn)程實(shí)時(shí)監(jiān)控。移動(dòng)式5G通信基準(zhǔn)站系統(tǒng)主要由天線支架、電源、定位終端、5G芯片、天線等組成。研究表明,5G的最低傳輸速率為4G網(wǎng)絡(luò)的10~100倍,峰值速率能夠達(dá)到4G的20倍,而4G網(wǎng)絡(luò)的時(shí)延為5G網(wǎng)絡(luò)的20~30倍,說明5G網(wǎng)絡(luò)的技術(shù)指標(biāo)相較于4G網(wǎng)絡(luò)具有顯著提升。瀝青路面智能化施工示意圖如圖1所示:
圖1 瀝青路面智能化施工示意圖
1.3 攤鋪機(jī)和壓路機(jī)智能化改造
智能攤鋪機(jī)和無人駕駛壓路機(jī)主要是利用先進(jìn)技術(shù)實(shí)現(xiàn)自動(dòng)化、智能化的施工,以下對(duì)這兩種機(jī)械改造方案進(jìn)行詳細(xì)說明:
1.3.1 攤鋪機(jī)
智能攤鋪機(jī)采用高精度定位技術(shù),實(shí)時(shí)攤鋪機(jī)位置的監(jiān)測(cè)和定位,確保瀝青路面的攤鋪精度。通過在攤鋪機(jī)上安裝激光傳感器、超聲波傳感器,實(shí)時(shí)監(jiān)測(cè)攤鋪的厚度、平整度,從而實(shí)現(xiàn)自動(dòng)化控制和調(diào)整。通過微處理器和先進(jìn)算法,對(duì)傳感器采集的數(shù)據(jù)進(jìn)行處理,并根據(jù)預(yù)設(shè)的攤鋪參數(shù)自動(dòng)調(diào)整攤鋪機(jī)作業(yè)狀態(tài),以達(dá)到最佳的攤鋪效果。
1.3.2 壓路機(jī)
無人駕駛壓路機(jī)主要利用高精度定位系統(tǒng)、激光雷達(dá)或攝像頭等傳感器,感知周圍環(huán)境,識(shí)別道路標(biāo)志和障礙物,實(shí)現(xiàn)壓路機(jī)的自動(dòng)導(dǎo)航和定位,確保壓路機(jī)在無人駕駛的情況下能夠安全、準(zhǔn)確地碾壓作業(yè)。此外,在壓路機(jī)上安裝振動(dòng)傳感器、溫度傳感器,實(shí)時(shí)監(jiān)測(cè)壓路機(jī)的振動(dòng)頻率、溫度,同時(shí)通過智能控制系統(tǒng)對(duì)壓路機(jī)的振動(dòng)輪進(jìn)行精確控制,確保壓實(shí)效果滿足要求。
2 工程概況
在某大型高速公路建設(shè)項(xiàng)目中,采用了先進(jìn)的瀝青路面無人集群施工技術(shù),工程涉及數(shù)十公里的路面鋪設(shè)任務(wù)。為確保施工進(jìn)度與質(zhì)量,引入無人駕駛壓路機(jī)機(jī)群、智能攤鋪機(jī)、移動(dòng)式5G通信基站、碾壓控制程序等智能化控制系統(tǒng)。現(xiàn)場(chǎng)無人集群包括2臺(tái)無人駕駛雙鋼輪振動(dòng)壓路機(jī)、3臺(tái)無人駕駛輪胎壓路機(jī)、1臺(tái)攤鋪機(jī)。在整個(gè)施工過程中,攤鋪機(jī)自動(dòng)攤鋪,壓路機(jī)群自主導(dǎo)航、協(xié)同作業(yè),確保瀝青路面的均勻碾壓,實(shí)現(xiàn)了高效率、高質(zhì)量的瀝青路面施工,大幅縮短了工期,降低了人工成本。
2.1 施工方案
根據(jù)施工組織要求,該項(xiàng)目試驗(yàn)段配備的機(jī)械設(shè)備如表1所示:
2.1.1 攤鋪方案
采用1臺(tái)PR1655攤鋪機(jī)進(jìn)行一次性攤鋪,路面寬度為10.5 m,按照預(yù)估的拌和站生產(chǎn)能力,攤鋪速度應(yīng)定為2.5 m/min,夯錘等級(jí)為450 r/min。
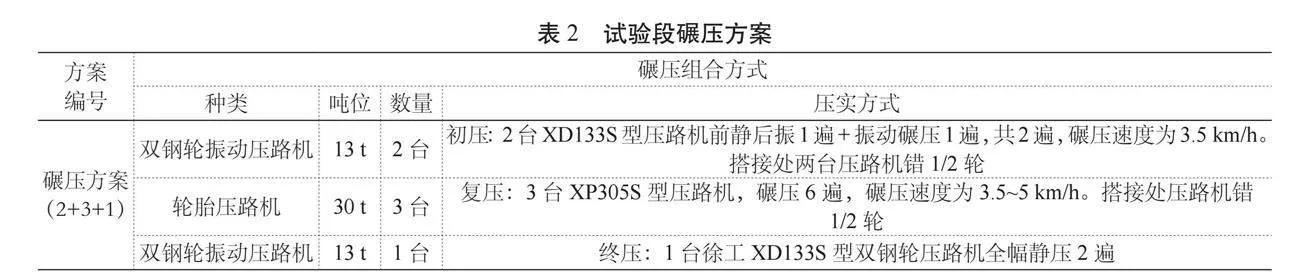
2.1.2 碾壓方案
碾壓方案如表2所示,無人集群施工方案如圖2所示。
2.1.3 碾壓溫度
試驗(yàn)段中面層的碾壓溫度要求如表3所示:
2.2 無人施工質(zhì)量控制要點(diǎn)
(1)當(dāng)攤鋪機(jī)向前推進(jìn)并拉開15 m的距離后,操作人員通過手持平板對(duì)雙鋼輪壓路機(jī)進(jìn)行遠(yuǎn)程遙控,使雙鋼輪壓路機(jī)從中間位置開始,向一端以45°進(jìn)行碾壓,確保接縫處瀝青混合料的密實(shí)度和強(qiáng)度。碾壓過程應(yīng)采用先振后靜模式,碾壓順序從已鋪設(shè)的路面逐漸跨縫向新鋪面層過渡,避免因接縫處理不當(dāng)導(dǎo)致路面不平整或開裂。
(2)在瀝青混合料處于高溫狀態(tài),且尚未產(chǎn)生推移、開裂時(shí),利用高溫下的流動(dòng)性,遵循“緊跟、慢壓、高頻、低幅、少水”的原則對(duì)混合料進(jìn)行碾壓,確保達(dá)到預(yù)期的壓實(shí)度和平整度。
(3)無人集群系統(tǒng)通過精確路徑規(guī)劃指導(dǎo)壓路機(jī)進(jìn)行軟起軟停、錯(cuò)輪碾壓和有序階梯形碾壓,避免對(duì)混合料產(chǎn)生沖擊和重復(fù)壓實(shí),提高施工效率和路面質(zhì)量。
(4)施工人員通過手持平板調(diào)整碾壓設(shè)備到達(dá)路面的邊緣位置,即可實(shí)現(xiàn)高效精準(zhǔn)的邊部碾壓。針對(duì)無人集群施工中的邊部漏壓情況,應(yīng)配備專業(yè)人員負(fù)責(zé)對(duì)漏壓邊部進(jìn)行及時(shí)補(bǔ)壓,確保整體質(zhì)量不受影響。
(5)在施工過程中,當(dāng)雙鋼輪壓路機(jī)需要加水時(shí),手持平板接收到報(bào)警提醒,施工人員迅速確認(rèn)并啟動(dòng)加水模式,智能系統(tǒng)會(huì)自動(dòng)規(guī)劃壓路機(jī)退出施工區(qū)域,避免與其他施工車輛發(fā)生沖突,需人工介入進(jìn)行加水作業(yè)。與此同時(shí),備用的雙鋼輪壓路機(jī)會(huì)自動(dòng)前往接替區(qū)域,整個(gè)過程中其他施工車輛無須停車等待,大大提高了施工效率。
(6)在橋梁下方進(jìn)行無人施工會(huì)影響信號(hào)的傳遞,導(dǎo)致車輛無法獲取準(zhǔn)確的定位信息,為此,可以在施工區(qū)域的兩側(cè)布置定位標(biāo)簽,為施工提供定位參照,同時(shí)設(shè)置高精度的定位校準(zhǔn)基站。當(dāng)施工車輛在橋梁下方作業(yè)時(shí),車載定位設(shè)備會(huì)接收定位標(biāo)簽的信號(hào),并結(jié)合定位校準(zhǔn)基站對(duì)數(shù)據(jù)進(jìn)行校準(zhǔn),實(shí)時(shí)獲取高精度的定位信息,為施工車輛導(dǎo)航和定位提供支持。
3 瀝青路面智能攤鋪碾壓效果分析
3.1 壓實(shí)軌跡分布均勻性
通過無人駕駛智能施工管理平臺(tái)可以查看壓實(shí)軌跡與遍數(shù),同時(shí)智能壓實(shí)界面提供了溫度、速度和振動(dòng)頻率等實(shí)時(shí)數(shù)據(jù),配備加速度傳感器和智能算法,自動(dòng)識(shí)別并改善壓實(shí)不足區(qū)域,確保整體壓實(shí)的均勻性和高質(zhì)量。
根據(jù)管理平臺(tái)導(dǎo)出數(shù)據(jù),無人駕駛雙鋼輪壓路機(jī)和膠輪壓路機(jī)應(yīng)分別壓實(shí)4~6遍、6~8遍。據(jù)統(tǒng)計(jì),高達(dá)97.91%的施工面積滿足規(guī)定壓實(shí)遍數(shù)要求,主要得益于5G網(wǎng)絡(luò)和GNSS高精度定位技術(shù)的完美結(jié)合,實(shí)現(xiàn)了厘米級(jí)定位,同時(shí)通過壓路機(jī)間的信息交互,智能調(diào)整各壓路機(jī)間的安全行駛距離,確保了壓實(shí)的均勻性。
3.2 壓實(shí)質(zhì)量檢測(cè)
為了驗(yàn)證實(shí)際壓實(shí)質(zhì)量,檢測(cè)人員在施工后對(duì)樁號(hào)K3+015~K3+315無人駕駛壓實(shí)試驗(yàn)段和樁號(hào)K3+315~K3+615的人工駕駛壓實(shí)路段進(jìn)行隨機(jī)抽樣,檢測(cè)路面厚度和壓實(shí)度,并在距離中央分隔帶大約2 m的位置進(jìn)行滲水系數(shù)檢測(cè),詳細(xì)記錄檢測(cè)數(shù)據(jù),評(píng)估無人駕駛壓實(shí)技術(shù)的實(shí)際效果及對(duì)路面質(zhì)量的具體影響[2]。檢測(cè)結(jié)果如表4所示:
由表4分析可知,檢測(cè)結(jié)果均滿足規(guī)范要求,且無人駕駛壓實(shí)試驗(yàn)段的厚度、壓實(shí)度、滲水檢測(cè)結(jié)果的標(biāo)準(zhǔn)差分別達(dá)到0.7、0.1、1.1,相比人工駕駛壓實(shí)施工段,其數(shù)據(jù)變異性和離散程度更小,表明無人駕駛壓實(shí)技術(shù)顯著提升了路面整體質(zhì)量。
4 瀝青路面智能攤鋪碾壓施工效果分析
4.1 提升定位精度
施工現(xiàn)場(chǎng)引入了5G網(wǎng)絡(luò)通信后,通信效率和施工安全性得到了顯著提升。5G網(wǎng)絡(luò)結(jié)合千尋方案,將定位精度提升至2~3 cm,明顯優(yōu)于4G網(wǎng)絡(luò)10 cm的定位精度,使施工安全制動(dòng)時(shí)間從幾秒大幅縮減至幾毫秒,從而極大地增強(qiáng)了施工現(xiàn)場(chǎng)的安全性和工作效率。
4.2 降低施工成本
使用無人駕駛智能壓實(shí)系統(tǒng)施工,每月可節(jié)省4名操作工人,節(jié)約人工費(fèi)2.4萬元。通過實(shí)時(shí)數(shù)據(jù)反饋精確控制壓實(shí)遍數(shù),比傳統(tǒng)工藝減少復(fù)壓次數(shù)1~2遍,進(jìn)而降低了油料消耗和設(shè)備磨損,以本工程為例,采用此技術(shù)后的設(shè)備成本降低約8.14%,總節(jié)約成本約10萬元。
4.3 提高壓實(shí)效果
利用精準(zhǔn)機(jī)械控制和先進(jìn)的5G網(wǎng)絡(luò)及GNSS高精度定位技術(shù),對(duì)施工邊緣區(qū)域?qū)崿F(xiàn)了3 cm的高精度貼邊壓實(shí),顯著提升了邊緣區(qū)域的壓實(shí)質(zhì)量,展現(xiàn)了無人駕駛技術(shù)在道路施工中的卓越優(yōu)勢(shì)。
5 結(jié)語
該文通過對(duì)瀝青路面智能攤鋪碾壓技術(shù)原理進(jìn)行分析,依托實(shí)際工程項(xiàng)目,開展無人集群的攤鋪碾壓施工,并對(duì)施工質(zhì)量進(jìn)行了檢測(cè),相較于傳統(tǒng)人工駕駛施工,無人駕駛壓實(shí)技術(shù)顯著提升了路面均勻性,同時(shí)將精度偏差控制在2~3 cm,安全制動(dòng)距離縮短至毫秒級(jí),節(jié)約成本約10萬元,對(duì)于提升瀝青路面施工質(zhì)量具有重要意義。
參考文獻(xiàn)
[1]李青洋,劉天云,王澄.瀝青路面智能化施工系統(tǒng)研究[J].公路,2020(11):87-90.
[2]張揚(yáng),費(fèi)燕華.基于多種技術(shù)的無人駕駛壓實(shí)系統(tǒng)研究及應(yīng)用分析[J].重慶建筑,2022(7):23-26.
猜你喜歡
建材發(fā)展導(dǎo)向(2022年18期)2022-09-22 07:13:20
建材發(fā)展導(dǎo)向(2022年12期)2022-08-19 02:33:10
建材發(fā)展導(dǎo)向(2022年10期)2022-07-28 03:04:36
建材發(fā)展導(dǎo)向(2021年22期)2022-01-18 06:12:46
建材發(fā)展導(dǎo)向(2021年19期)2021-12-06 03:20:50
建材發(fā)展導(dǎo)向(2021年18期)2021-11-05 09:19:50
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:58
建材發(fā)展導(dǎo)向(2021年9期)2021-07-16 07:11:36
上海建材(2017年4期)2017-10-16 01:33:34
中國(guó)房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:48