四旋翼無人機在線路施工中的控制改進優化
2024-12-28 00:00:00王京京盧驤羅躍方傅偉峰
今日自動化 2024年10期
關鍵詞:施工管理

[關鍵詞]線路巡檢;施工管理;模糊控制;四旋翼無人機
[中圖分類號]TP273 [文獻標志碼]A [文章編號]2095–6487(2024)10–0111–03
四旋翼無人機在低空飛行領域具有極大的靈活性和便捷的操作性,在電力建設領域具有廣闊前景。傳統的無人機抗干擾能力弱,文章基于無人機應用,提出了一種模糊控制系統,著重強化無人機抗干擾性能,提高無人機穩定性和準確性。經建模仿真表明,該系統具有更好的快速性、穩定性,為提高送電工程應用提供研發參考方向。
1系統構成
無人機系統主要以飛行控制系統、任務荷載系統與地面控制系統為主。文章主要研究其飛行控制系統,首先建立姿態坐標系gxyz(圖1)和定位坐標系oxyz(圖2),x軸正方向為航進方向。
四旋翼無人機在線路現場使用中主要是通過無人機攜帶的傳感器反饋出無人機的飛行姿態,再通過閉環反饋偏差控制調節旋翼的旋轉速度。傳統算法控制會使系統存在不同程度的晃動超調,文章結合送電線路飛行施工經驗,搭建模糊自適應控制系統的數學模型。通過軟件對比仿真角度對速度串級控制和模糊自適應PID控制兩種控制策略,文章根據實際應用,合理安排了控制系統的兩個閉環反饋,以減少超調量和反應時間。無人機飛行姿態控制流程如圖3所示。
2無人機系統建立及仿真
現在的線路施工和巡檢中,交叉跨越和臨近帶電體的案例層出不窮,在使用四旋翼無人機巡視時,臨近帶電線路飛行十分危險,輕則無人機損壞,重則造成線路停電事故,影響線路供電安全。故提高無人機反應時間和減小超調量是重中之重,以此為基礎搭建起無人機的飛行控制模型系統。
2.1仿真系統框架搭建
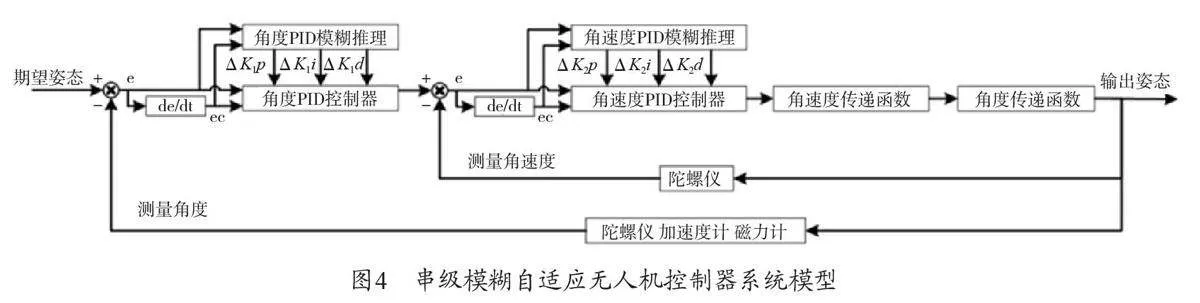
文章基于一線線路基建實際,提出并建立了串級模糊自適應控制系統。該系統設計控制器以偏差變化率作為輸入量,PID參數作為控制器的輸出。通過對規則的自動閉環調整,來實現控制參數控制,讓控制參數更加接近于符合實際的整定值,以追求無人機的穩定性和可靠性為目的,建立了無人機的飛行仿真模型。
根據線路基建現場實際應用,文章建立了串級模糊自適應無人機控制器系統模型,如圖4所示。該系統在基于實際應用的基礎上,在閉環參數反饋上實現了對外環角度、內環角速度的精確控制,實現了對無人機飛行控制系統的自適應控制,解決了傳統控制系統中出現的較大超調量和震蕩時間長的問題,增強了四旋翼無人機的穩定性和操作性,提升了控制系統對帶電體的磁場抗干擾能力。
2.2模糊控制系統的設計
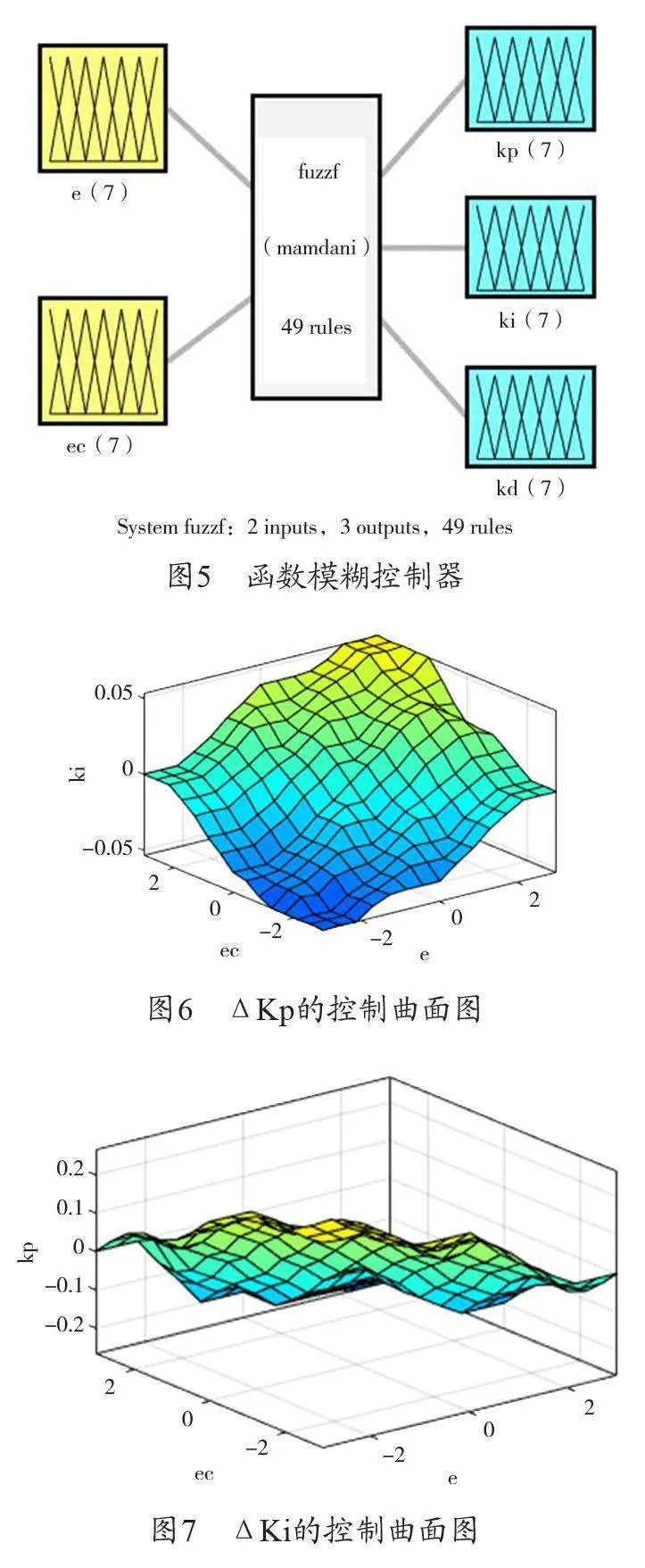
無人機飛行控制系統在實際使用中更加注重角度閉環反饋和角速度閉環反饋的偏差及其變化率,因此將其模糊規則設定為合適的7個規則。無人機飛行系統選用三角形隸屬函數作為模糊子集,規則根據在送電線路架設中實際無人機飛行經驗所得,根據無人機在巡視和懸停時的需求方向,具體函數模糊控制器如圖5所示。
建立模糊規則是提高無人機在送電一線實際應用中穩定性和可靠性的重中之重,本系統設計的反饋控制主要實現由系統輸入量的變化計算出輸出量的值并反饋至系統閉環,系統輸入偏差及其變化率控制曲面圖如圖6、圖7所示。
2.3Matlab仿真搭建
為了與無人機在線路基建實際應用相對應,仿真模型的搭建在FIS(模糊推理系統)編輯器中對角度器進行輸入編譯。根據建立的模糊自適應無人機控制系統中的角度、角速度控制參數,建立基于送電線路工程應用的Simulink仿真模型。
仿真結果表明,基于送電一線施工中使用經驗建立起來的四旋翼無人機控制系統在抗干擾能力和反應速度上明顯優于角度角速度串級PID控制,當然這個結果這僅限于仿真中,下一步將繼續研究無人機的嵌入式控制,進一步驗證算法的優越性,來增強四旋翼無人機在線路施工和巡檢中的應用實踐。
3結束語
結合工作實際,針對線路施工和巡檢臨近帶電體的穩定性和操作性欠佳的應用場景,提出了一種改進型模糊控制算法。仿真結果表明,模糊控制算法明顯優于傳統PID控制,極大提高無人機的穩定和操作性,消除了使用無人機所帶來的安全隱患,提高了電網一線生產安全監管和巡視水平,能夠進一步在現有基礎上開發出更多的應用場景,用于進行送電線路施工現場安全檢查、現場勘察及快速巡查基層電力設備狀態,不僅可以節約人力成本,還可以保障施工和人身安全。
猜你喜歡
中國科技博覽(2016年19期)2016-10-19 13:56:08
中國科技博覽(2016年19期)2016-10-19 13:50:22
中國科技博覽(2016年19期)2016-10-19 13:47:07
中國科技博覽(2016年18期)2016-10-19 09:07:55
中國科技博覽(2016年18期)2016-10-19 08:58:33
中國科技博覽(2016年18期)2016-10-19 08:46:18
中國科技博覽(2016年18期)2016-10-19 08:43:47
中國科技博覽(2016年18期)2016-10-19 08:38:45
科技視界(2016年21期)2016-10-17 20:42:32
科技視界(2016年21期)2016-10-17 19:56:58