玉米精量播種復合作業機具設計及試驗
2024-12-31 00:00:00韓中東,劉江濤,楊志杰,李珊珊,李濤
中國農機化學報 2024年8期




摘要:針對現有玉米播種機播種精度以及播種合格指數較低的問題,設計一種玉米精量播種復合作業機具。闡述播種復合作業機具的工作原理以及主要技術參數,一次進地可同時完成苗帶旋耕、施肥、精量播種、覆土和鎮壓等工作。選用苗帶旋耕,并對旋耕機構作業運動狀態進行理論分析,確定旋耕刀周向排列,來達到保護性耕作和提高播種精度的要求。確定平行四連桿仿形機構的總體結構,并對其進行受力和尺寸參數分析,通過計算得到仿形機構的桿長,使播種單體有足夠的仿形量,保證播深一致性。選用氣吸式排種器,確定氣吸式排種器結構,計算得出排種器最高轉速,可達到精量播種的目的。在黃淮海地區進行田間試驗,結果表明:當播種機作業速度為4 km/h,苗帶旋耕機構轉速為280 r/min時,機具通過性良好,苗帶寬度合格率為93.5%,播深合格率為93.1%,粒距合格率為93.5%,重播率為5.9%,漏播率為3.3%,合格粒距變異系數為15.64%。各項性能指標滿足農藝要求。
關鍵詞:玉米;精量播種機;苗帶旋耕;氣吸式;仿形機構
中圖分類號:S223.2" " " 文獻標識碼:A" " " 文章編號:2095?5553 (2024) 08?0020?07
Design and experiment of compound operation machine for precision sowing of maize
Han Zhongdong1, Liu Jiangtao1, Yang Zhijie2, Li Shanshan1, Li Tao1
(1. College of Mechanical and Electrical Engineering, Hebei Agricultural University, Baoding, 071001, China;"2. Hebei Agricultural Mechanization Research Institute Co., Ltd., Shijiazhuang, 050000, China)
Abstract: Aiming at the problem of low sowing accuracy and low sowing qualification index of existing corn seeders, a kind of corn precision sowing compound operation machine is designed. The working principle and main technical parameters of the sowing composite operation machine are expounded, and the work of rotary tillage, fertilization, precision sowing, mulching and suppression of seedlings can be completed at the same time in one entry. Seedling belt rotary tillage was selected, and the operation motion state of rotary tillage mechanism was analyzed theoretically, and the circumferential arrangement of rotary tillage knives was determined to meet the requirements of protective tillage and improving sowing accuracy. The overall structure of the parallelogram profile mechanism was determined, and the force and size parameters were analyzed, and the rod length of the profiling mechanism was obtained through calculation, to make the sowing cell have enough profiling to ensure the consistency of the sowing depth. The air?suction seeder was selected, the structure of the air?suction seeder was determined, and the maximum speed of the seeder was calculated, which could achieve the purpose of precise seeding. The field test in Huang?Huai?Hai area showed that when the operating speed of the seeder was 4 km/h and the speed of the seedling belt rotary tillage mechanism was 280 r/min, the passability of the machine was good, the pass rate of seedling belt width was 93.5%, the qualification rate of sowing depth was 93.1%, the pass rate of grain size was 93.5%, the replay rate was 5.9%, the missed broadcast rate was 3.3%, and the coefficient of variation of qualified grain size was 15.64%. The performance indicators meet the agronomic requirements.
Keywords: corn; precision sowing machine;rotary tillage with seedling belt; air suction type; profile copying mechanism
0 引言
我國現已成為世界上第一大玉米種植國、第二大玉米生產國,年產量,約占世界總產量的20%左右。在玉米種植中,以往都是使用手工播種,收效差,勞動強度大。近幾年,玉米播種機在玉米生產中的應用越來越廣泛。為此,國內外研究人員都對玉米播種機進行了相關研究。
2BFGY-5(8)玉米旋耕施肥播種機中每個播種單體配有獨立仿形總成,可隨地面起伏仿形,把旋耕機與播種機相連,一次性完成旋耕、播種和施肥,拖拉機進地次數減少[1],工作成本降低,農民作業強度減輕;2BMXS-310智能免耕施肥覆蓋播種機,應用信息技術、傳感技術和自動化技術,來達到綜合效果,是國內首例農機具智能化的產品,該播種機的作業質量、效率以及適應能力都有明顯提高;2BFX-12/12(264)旋耕施肥播種機采用外槽輪式排種器,結構簡單緊湊,質量相對較小,成本低,可適應不同耕地面積的農戶使用,使用方便靈活,適應性強。王宇杰[2]設計了一種玉米大壟雙行旋耕施肥播種機,可一次進地即完成整地與播種作業,該播種機采用機械式排種器和仿形機構,從而達到穩定可靠播種的目的。美國研制的DV90R玉米精量播種機,一次進地可同時實現開溝、固床、播種、覆土、鎮壓[3]等作業,種距均勻,更換不同的不銹鋼種盤,可以實現精量播種多種作物;意大利研制了一款MT系列播種機,每個播種單體配有獨立仿形總成,對地形起伏有較好的適應性,并有較高的播種深度一致性[4];挪威生產的2BQJ-12型精量播種機,選用缺口圓盤,達到破茬開溝側深施肥的效果,應用先進密封結構的排種盤,實現播種均勻的目的,延長播種機的使用壽命,可對多種作物和地形進行播種作業[5];法國MAXIMA2TRX精量點播機采用氣力式播種,可折疊,電子控制裝置的選裝不同,在任何工況下可播種;美國研制的MECA V4系列精密播種機,采用電控系統實現行距自動調節,采用平行四連桿仿形機構調節播深。
綜上所述,國外播種機智能化程度高,我國玉米精量播種機大多選用全旋耕作業,施肥和播種大多采用機械式排種器,播種精度較低。本文設計一種玉米精量播種復合作業機具,電動控制施肥和播種,選用苗帶旋耕,從而實現保護性耕作[6, 7],減輕風蝕和水蝕,增加土壤肥力和保墑抗旱能力,提高玉米播種播深一致性和精度。
1 玉米播種農藝特性
玉米播種質量對產量問題有直接影響。在直接播種玉米的情況下,上面會覆蓋更多的小麥秸稈,在一定程度上,陽光照曬不到,有些種子還會播種到麥茬上,直接暴露在地表,不利于玉米的發芽出苗。因此,在播種時苗帶旋耕,以等行距400 mm,播種深度50 mm種植,如圖1所示。
2 整機結構及工作原理
2.1 整機結構
玉米精量播種復合作業機具主要由機架、苗帶旋耕機構、排肥機構、精量播種機構、傳動裝置組成,其中苗帶旋耕機構主要有旋耕刀輥和旋耕刀具組成,排肥機構主要由槽輪式排肥器與DM18-NXB型播種和施肥控制器組成,排種機構主要由氣吸式排種器與平行四桿仿形機構組成。通過萬向節總成把拖拉機輸出軸輸出的動力,傳給側傳動箱中的傳動機構,從而帶動旋耕刀輥上的旋耕刀旋轉,完成旋耕作業,電機給排種器和排肥器提供動力。總體結構如圖2所示。
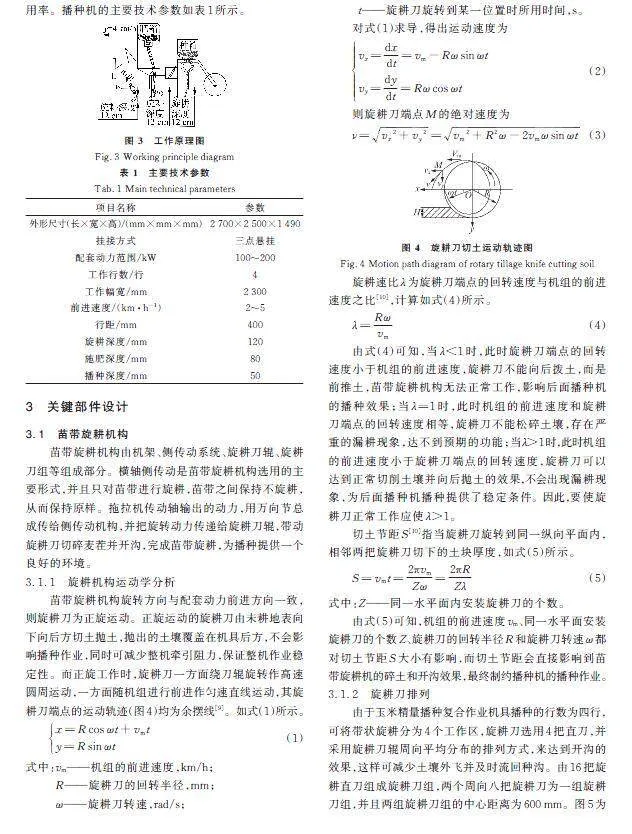
2.2 工作原理及主要技術參數
播種機工作原理如圖3所示。利用三點懸掛裝置把拖拉機與播種機連接起來[8],聯軸器將拖拉機的傳動軸與該播種機的傳動軸連接向傳動箱中的傳動機構傳遞動力,驅動旋耕刀輥旋轉,由旋耕刀輥帶動旋耕刀完成苗帶旋耕作業。播種和施肥都是通過電機的動力來控制,工作時地輪轉動,通過信號傳感器把指令傳遞給控制器,施肥和播種控制器根據面板輸入的排肥和播種數據完成相應作業。播種機一次進地可同時完成苗帶旋耕、施肥、精量播種和鎮壓等工作,既能蓄水保墑,還能減輕勞動強度,達到精量播種,提高播種播深一致性及化肥和種子的利用率。播種機的主要技術參數如表1所示。
3 關鍵部件設計
3.1 苗帶旋耕機構
苗帶旋耕機構由機架、側傳動系統、旋耕刀輥、旋耕刀組等組成部分。橫軸側傳動是苗帶旋耕機構選用的主要形式,并且只對苗帶進行旋耕,苗帶之間保持不旋耕,從而保持原樣。拖拉機傳動軸輸出的動力,用萬向節總成傳給側傳動機構,并把旋轉動力傳遞給旋耕刀輥,帶動旋耕刀切碎麥茬并開溝,完成苗帶旋耕,為播種提供一個良好的環境。
3.1.1 旋耕機構運動學分析
苗帶旋耕機構旋轉方向與配套動力前進方向一致,則旋耕刀為正旋運動。正旋運動的旋耕刀由未耕地表向下向后方切土拋土,拋出的土壤覆蓋在機具后方,不會影響播種作業,同時可減少整機牽引阻力,保證整機作業穩定性。而正旋工作時,旋耕刀一方面繞刀輥旋轉作高速圓周運動,一方面隨機組進行前進作勻速直線運動,其旋耕刀端點的運動軌跡(圖4)均為余擺線[9]。如式(1)所示。
[x=Rcosωt+vmty=Rsinωt]" " " " " " " "(1)
式中:vm——機組的前進速度,km/h;
R——旋耕刀的回轉半徑,mm;
ω——旋耕刀轉速,rad/s;
t——旋耕刀旋轉到某一位置時所用時間,s。
對式(1)求導,得出運動速度為
[vx=dxdt=vm-Rωsinωtvy=dydt=Rωcosωt]" " " " " " " " " " (2)
則旋耕刀端點M的絕對速度為
[ν=vx2+vy2=vm2+R2ω-2vmωsinωt] (3)
旋耕速比λ為旋耕刀端點的回轉速度與機組的前進速度之比[10],計算如式(4)所示。
[λ=Rωvm] (4)
由式(4)可知,當λlt;1時,此時旋耕刀端點的回轉速度小于機組的前進速度,旋耕刀不能向后撥土,而是前推土,苗帶旋耕機構無法正常工作,影響后面播種機的播種效果;當λ=1時,此時機組的前進速度和旋耕刀端點的回轉速度相等,旋耕刀不能松碎土壤,存在嚴重的漏耕現象,達不到預期的功能;當λgt;1時,此時機組的前進速度小于旋耕刀端點的回轉速度,旋耕刀可以達到正常切削土壤并向后拋土的效果,不會出現漏耕現象,為后面播種機播種提供了穩定條件。因此,要使旋耕刀正常工作應使λgt;1。
切土節距S[10]指當旋耕刀旋轉到同一縱向平面內,相鄰兩把旋耕刀切下的土塊厚度,如式(5)所示。
[S=vmt=2πvmZω=2πRZλ] (5)
式中:Z——同一水平面內安裝旋耕刀的個數。
由式(5)可知,機組的前進速度vm、同一水平面安裝旋耕刀的個數Z、旋耕刀的回轉半徑R和旋耕刀轉速ω都對切土節距S大小有影響,而切土節距會直接影響到苗帶旋耕機的碎土和開溝效果,最終制約播種機的播種作業。
3.1.2 旋耕刀排列
由于玉米精量播種復合作業機具播種的行數為四行,可將帶狀旋耕分為4個工作區,旋耕刀選用4把直刀,并采用旋耕刀輥周向平均分布的排列方式,來達到開溝的效果,這樣可減少土壤外飛并及時流回種溝。由16把旋耕直刀組成旋耕刀組,兩個周向八把旋耕刀為一組旋耕刀組,并且兩組旋耕刀組的中心距離為600 mm。圖5為旋耕刀周向排列圖。在工作過程中,由旋耕刀輥帶動旋耕刀完成旋轉,并達到相繼入土的效果,會形成50 mm的開溝寬度,即為播種寬度,并且動土率小,溝底平整。
3.2 平行四連桿仿形機構
播種機在麥茬地免耕播種過程中,因地表覆蓋大量小麥殘茬秸稈,工作時,遇到崎嶇不平的土地起伏需要上下仿形。平行四連桿仿形機構將播種機中每一個播種單體與機架中的橫梁相連,這樣每個播種單體在工作時,可根據各自前進的地表起伏狀況進行獨立仿形,實現整個單體的仿形,從而保證開溝深度恒定且溝底平整,達到玉米播種深度一致的目的,并有較高的出苗率,利于出苗整齊。這種仿形較準確,精度較高,效果較好,可使整機結構緊湊,工作可靠,機具作業穩定。
3.2.1 總體結構設計
如圖6所示,平行四連桿仿形機構的結構主要由固定架、U型螺栓卡口、上下連桿、彈簧、彈簧固定座、播種部分機架等組成。該機構左側通過U型螺栓與機架橫梁連接,右側上下連桿與播種部分機架固定,從而保證播種單體的仿形過程是與地面平行的。上下連桿平行且相等,在機構上下運動仿形過程中,一直做平行運動,連桿與連桿之間焊接橫桿,限制左右方向的自由度,上連桿與下連桿之間連接升降裝置,可增大仿形量,減小播種單體震動。開溝器固定在播種部分機架上,使其形成一個整體,仿形時,開溝器隨地面起伏上下運動的過程中,其入土角度始終保持一致,從而保證了開溝器的工作性能,這使得其仿形性能有了很大的提升[11]。
3.2.2 仿形機構參數設計
本文用平行四連桿仿形機構,來達到仿形的目的。為了確保播種深度的穩定性和仿形過程的流暢性,工作時各部件必須達到平衡狀態,播種機工作過程中,平行四連桿仿形機構的受力示意如圖7所示。
由力的平衡方程式可得
[FAcosα+FCcosα+Tcosψ-Rx-fNF=0FAsinα+FCsinα-Tsinψ+Ry-G+F=0] (6)
式中:FA——上拉桿AB的拉力,N;
FC——下拉桿CD的拉力,N;
α——牽引角,(°);
Rx——播種開溝器的水平阻力,N;
Ry——播種開溝器的垂直阻力,N;
T——彈簧拉力,N;
ψ——彈簧拉力與水平方向的夾角,N;
G——播種機單體總重量,N;
fN——地輪的摩擦系數;
F——地輪的垂直支持力,N。
由式(6)可得
[F=G-Ry-Rxtanα+T(sinψ+cosψtanα)2(1+fNtanα)]" (7)
由式(7)可知,在仿形機構工作過程中,播種單體所受的支持力F與播種單體自重G、播種開溝器阻力Rx和Ry、牽引角α、彈簧拉力T、彈簧拉力與水平方向夾角ψ有關,當N過大或過小時,都會使仿形不穩定,開溝器開溝深度和入土角度不一致,播深一致性差,最終會影響到出苗率,不利于出苗整齊。為使仿形機構結構參數合適,仿形裝置設計合理,則仿形機構的尺寸參數如圖8所示。
根據實際生產經驗,通常上下仿形量在80~120 mm之間[12]。由圖8可知,上下仿形量分別為
[h1=Lsinα1+Lsinα2] (8)
[h2=Lsinα1+α3-Lsinα1] (9)
[h=h1+h2=Lsinα2+Lsinα1+α3] (10)
[L=hsinα2+sin(α1+α3)] (11)
式中:h1——上仿形量,mm;
h2——下仿形量,mm;
h——總仿形量,mm;
α1——初始牽引角,(°);
α2——上仿形角,(°);
α3——下仿形角,(°);
L——上下連桿的長度,mm。
由式(11)可知,平行四連桿仿形機構上下連桿的長度L與總仿形量h、初始牽引角α1和上下仿形角α2、α3有關。在仿形機構總仿形量一定的條件下,桿長L越大,初始牽引角α1和上下仿形角α2、α3越有較小的變化幅度;桿長L越小,初始牽引角α1和上下仿形角α2、α3越有較大的變化幅度。在播種機正常工作的情況下,初始牽引角α1和上下仿形角α2、α3變化范圍越小越能使仿形機構結構緊湊,工作穩定,因此桿長L越大越好,但桿長L過大時,會使仿形機構結構不緊湊,重心后移,穩定性變差。
參考現有播種機初始牽引角的取值范圍為0°~10°,上仿形角變化范圍為20°~40°,下仿形角變化范圍為6°~22°[13]。根據農機設計手冊[14],確定h1=h2=100 mm,初始牽引角α1=5°,上仿形角α2=30°,下仿形角α3=10°。將以上數據代入式(11),計算并取整得L=260 mm。
3.3 氣吸式排種器
氣吸式排種器主要由左殼體、墊片、排種盤、傳動軸、壓盤、壓板、右殼體等組成,其結構如圖9所示。
排種器是播種機的核心部件,播種機的工作性能是由排種器的排種效果決定的[15]。本文設計的播種機是精量播種機,選用氣吸式排種器,這是一種利用負壓來吸取玉米種子從而達到精量播種目的。工作時,種箱內的玉米種子靠自重落入到排種器內,風機將吸氣室內的空氣吸出,從而排種器內產生負壓,這樣排種盤就會將玉米種子吸附。傳動軸帶動排種盤轉動,當玉米種子轉動到無負壓的地方就會脫離排種盤并沿豎直方向進入導種管,沿導種管落入種溝,達到排種的目的[16]。
氣吸式排種器轉速由機組前進速度、排種盤孔數、玉米播種粒距決定[17]。考慮到速度間單位需要轉化,如式(12)所示。
[n=1 000×vm60×z×s] (12)
式中:n——排種器轉速,r/min;
z——排種盤孔數,個;
s——株距,m。
因播種機前面的苗帶旋耕,以達到開溝的效果,故機組前進速度最高不超過5 km/h;同時,也考慮到玉米種子在運動中產生較大的慣性力,可能會出現吸孔運動超前種子運動、漏播、卡種、掉種等現象。根據黃淮海地區的種植經驗,玉米理論播種株距為100~120 mm,取s=110 mm;排種盤孔數為18,將以上參數代入式(12)取整可得,排種器的最高轉速為42 r/min。
4 播種機田間性能試驗與分析
4.1 試驗情況
2022年6月在河北省衡水深州市進行玉米播種試驗,如圖10所示。此次試驗地為小麥麥茬地,平均留茬高度為15 cm,秸稈覆蓋量為1.0~1.5 kg/m2。試驗玉米品種選用鄭單958玉米雜交種,測得千粒質量307 g左右,含水率11.5%。拖拉機配套動力為110 kW的東方紅天驕-LX1504,土壤含水率為10%~25%,土壤類型為壤土。
4.2 試驗方法
參照國家標準GB/T20865-2007《免(少)耕施肥播種機》,對所設計的玉米精量播種復合作業機具進行田間作業性能試驗,要求播深合格率≥80%;苗帶寬度合格率≥85%;粒距合格率≥80%;重播率≤15%;漏播率8%;合格粒距變異系數≤30%為試驗標準。選取機具通過性、苗帶寬度合格率、播深合格率、播種均勻性(粒距合格率、重播率、漏播率)、合格粒距變異系數作為參考指標,取平均值為試驗結果。
4.2.1 機具通過性
據農業農村部農業機械試驗鑒定總站的測試要求,測區長度不小于50 m,測定時,按照4 km/h的作業速度在作業長度100 m的田間進行連續作業,設往返為一個行程,在此行程中無發生輕度堵塞或者堵塞,即達到合格的標準。本試驗在麥茬地進行12次測試。
4.2.2 苗帶寬度
當播種機以4 km/h的作業速度,苗帶旋耕機構轉速為280 r/min進行播種完成后。隨機選擇12個小區,每個小區隨機選取6行種溝作為樣本進行測量,在測定之前把土層扒開[18],每行種溝選取20 m的距離,測量20 m內的苗帶寬度,測得數據并記錄。
4.2.3 播深合格率與播種均勻性
播種機按設定速度播種完成后,隨機選取12個小區,每個小區隨機選取6條苗帶,每條苗帶選取20 m,測量20 m內玉米植株的播深和粒距。不改變種子位置的前提下,人工扒開種溝上的覆土進行測量,同時記錄種子的深度以及兩相鄰種子之間的距離。種溝內的種子相鄰兩粒之間的距離gt;1.5倍理論粒距為漏播,lt;0.5倍理論粒距為重播[19]。以0.1Xref(Xref為理論粒距)[20]的間隔分成區段,每區段的變量為
[Xi=xiXref] [0.5lt;Xi≤1.5] (13)
式中:xi ——區段中值。
將粒距數據處理成Xi并按照規定統計ni'的值,ni'為在相應范圍內Xi的個數。
計算種溝內種子的播深合格率A(黃淮海地區要求玉米播種深度為50 mm左右為合格)、粒距合格率Y、重播率Q、漏播率M和合格粒距變異系數C的公式,如式(14)所示。
[M=n1X×100%Q=n2X×100%Y=n3X×100%A=n4X×100%σ=niXi2n'2-X2C=σ×100%] (14)
式中:n1——漏播個數,個;
n2——重播個數,個;
n3——粒距合格個數,個;
n4——播深合格個數,個;
X——每組試驗種子總個數,個;
σ——標準差;
[X]——平均合格粒距,mm;
4.3 試驗結果與分析
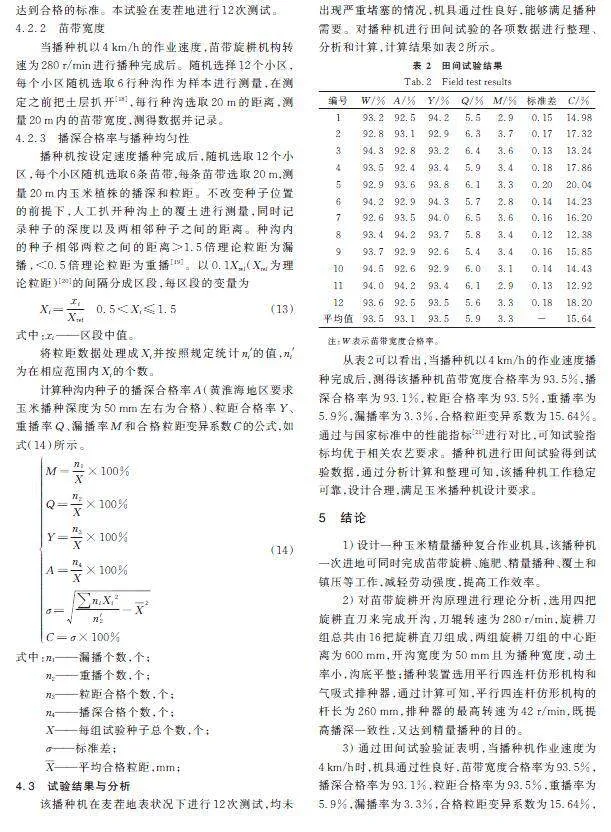
該播種機在麥茬地表狀況下進行12次測試,均未出現嚴重堵塞的情況,機具通過性良好,能夠滿足播種需要。對播種機進行田間試驗的各項數據進行整理、分析和計算,計算結果如表2所示。
從表2可以看出,當播種機以4 km/h的作業速度播種完成后,測得該播種機苗帶寬度合格率為93.5%,播深合格率為93.1%,粒距合格率為93.5%,重播率為5.9%,漏播率為3.3%,合格粒距變異系數為15.64%。通過與國家標準中的性能指標[21]進行對比,可知試驗指標均優于相關農藝要求。播種機進行田間試驗得到試驗數據,通過分析計算和整理可知,該播種機工作穩定可靠,設計合理,滿足玉米播種機設計要求。
5 結論
1) 設計一種玉米精量播種復合作業機具,該播種機一次進地可同時完成苗帶旋耕、施肥、精量播種、覆土和鎮壓等工作,減輕勞動強度,提高工作效率。
2) 對苗帶旋耕開溝原理進行理論分析,選用四把旋耕直刀來完成開溝,刀輥轉速為280 r/min,旋耕刀組總共由16把旋耕直刀組成,兩組旋耕刀組的中心距離為600 mm,開溝寬度為50 mm且為播種寬度,動土率小,溝底平整;播種裝置選用平行四連桿仿形機構和氣吸式排種器,通過計算可知,平行四連桿仿形機構的桿長為260 mm,排種器的最高轉速為42 r/min,既提高播深一致性,又達到精量播種的目的。
3) 通過田間試驗驗證表明,當播種機作業速度為4 km/h時,機具通過性良好,苗帶寬度合格率為93.5%,播深合格率為93.1%,粒距合格率為93.5%,重播率為5.9%,漏播率為3.3%,合格粒距變異系數為15.64%,達到免(少)耕施肥播種機的國家標準要求。
參 考 文 獻
[ 1 ] 馮林, 石東泉, 田建倉. 秸稈機械化綜合利用機具對比試驗[J]. 農機使用與維修, 2020, 284(4): 34.
[ 2 ] 王宇杰. 玉米大壟雙行旋耕施肥播種機的整機設計與試驗[D]. 哈爾濱: 東北農業大學, 2020.
[ 3 ] 曾山, 姚臘梅, 李凝, 等. 氣吸式辣椒精量穴直播機的研制與試驗[J]. 華南農業大學學報, 2020, 41(3): 102-109.
Zeng Shan, Yao Lamei, Li Ning, et al. Development and test of an air?suction type precision direct seeding machine for pepper [J]. Journal of South China Agricultural University, 2020, 41(3): 102-109.
[ 4 ] Schumann A W, Miller W M, Cugati S A, et al. Optimizing variable rate granular fertilizer spreader performance for single?tree prescription zones [C].2006 ASAE Annual Meeting. American Society of Agricultural and Biological Engineers, 2006: 1.
[ 5 ] 格蘭2BQJ-12型精量播種機[J]. 農業機械, 2015(12): 42.
[ 6 ] Conte O, Levien R, Debiasi H, et al. Soil disturbance index as an indicator of seed drill efficiency in no?tillage agrosystems [J]. Soil and Tillage Research, 2011, 114(1): 37-42.
[ 7 ] Parihar D S, Dogra B, Narang M K, et al. Development" " " and evaluation of notched concave disc seed drill for direct" " seeding of wheat in paddy stubble field [J]. Journal of Agriculture and Food Research, 2022, 10: 100421.
[ 8 ] Kumar R, Raheman H. Detection of flow of seeds in the" " " "seed delivery tube and choking of boot of a seed drill [J]." " " "Computers and Electronics in Agriculture, 2018, 153: 266- 277.
[ 9 ] 于海杰. 楔形減阻旋耕刀優化設計與試驗[D]. 保定: 河北農業大學, 2019.
[10] 王金峰, 王金武, 孔彥軍, 等. 懸掛式水田筑埂機及其關鍵部件研制與試驗[J]. 農業工程學報, 2013, 29(6): 28-34.
Wang Jinfeng," Wang Jinwu," Kong Yanjun, et al." Development and experiment of suspension ridger and its key components for paddy field [J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(6): 28-34.
[11] 劉濤. 油菜旋耕開溝施肥播種復式作業機的設計與研究[D]. 南京: 南京農業大學, 2016.
Liu Tao. Design and research on rotary tillage?ditching?fertilization and seeding combine machine for rape [D]. Nanjing: Nanjing Agricultural University, 2016.
[12] 樊小兵. 麥茬地玉米免耕播種機及其關鍵部件的研究[D]. 南京: 南京農業大學, 2016.
Fan Xiaobing. Research on corn no?tillage planter and its key components in wheat stubble fields [D]. Nanjing: Nanjing Agricultural University, 2016.
[13] 趙淑紅, 蔣恩臣, 閆以勛, 等. 小麥播種機開溝器雙向平行四桿仿形機構的設計及運動仿真[J]. 農業工程學報, 2013, 29(14): 26-32.
Zhao Shuhong, Jiang Enchen, Yan Yixun, et al. Design and motion simulation of opener with bidirectional parallelogram linkage profiling mechanism on wheat seeder [J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(14): 26-32.
[14] 中國農業科學研究院. 農業機械設計手冊[M]. 北京: 機械工業出版社, 1988.
[15] Vagadia R, Kadegiya H, Desai P, et al. Development of a mechanism for seed cum fertilizer drill [J]. Materials Today: Proceedings, 2021, 47: 3210-3216.
[16] 李玉環, 楊麗, 張東興, 等. 氣吸式玉米高速精量排種器投種性能分析與結構優化[J]. 農業工程學報, 2022, 38(8): 1-11.
Li Yuhuan, Yang Li, Zhang Dongxing, et al. Performance analysis and structure optimization of the maize precision metering device with air suction at high?speed condition [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(8): 1-11.
[17] 都鑫, 劉彩玲, 姜萌, 等. 自擾動內充型孔輪式玉米精量排種器設計與試驗[J]. 農業工程學報, 2019, 35(13): 23-34.
Du Xin, Liu Cailing, Jiang Meng, et al. Design and experiment of self?disturbance inner?filling cell wheel maize precision seed?metering device [J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(13): 23-34.
[18] 趙宏波, 何進, 李洪文, 等. 條帶式旋切后拋防堵裝置設計與試驗[J]. 農業機械學報, 2018, 49(5): 65-75.
Zhao Hongbo, He Jin, Li Hongwen, et al. Design and" experiment of strip rotary?cut?throw anti?blocking implement [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(5): 65-75.
[19] 陳為鵬, 胡培杰, 張寶昌, 等. 交錯苗帶式大豆免耕精量播種機設計與試驗[J]. 中國農機化學報, 2022, 43(2): 1-7.
Chen Weipeng, Hu Peijie, Zhang Baochang, et al. Design and experiment of no?tillage precision planters with staggered seedling belts for soybean [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(2): 1-7.
[20] 趙曉順, 于鳳超, 趙達衛, 等. 氣吸式玉米精量排種器的性能試驗研究[J]. 河北農業大學學報, 2020, 43(5): 103-107.
Zhao Xiaoshun, Yu Fengchao, Zhao Dawei, et al." Study on the performance test of pneumatic corn precision seed?metering device [J]. Journal of Agricultural University of Hebei, 2020, 43(5): 103-107.
[21] GB/T20865-2007, 免(少)耕施肥播種機[S].