高速公路養護作業區施工強度對速度的影響研究
2024-12-31 00:00:00王善偉牛同輝陳邦慶劉曉東李佳輝
交通科技與管理 2024年15期
關鍵詞:高速公路
摘要 高速公路是現代社會交通的重要組成部分,而養護施工作業則是保持其良好運行狀態的關鍵環節。在進行養護施工作業時,為了不影響整個交通網絡的正常運營,常常采取邊施工邊運營的交通組織模式。在這種模式下施工作業區會占用部分道路空間,使得作業區內的施工車輛與作業區外的社會車輛產生相互影響,形成了一種不易調和的矛盾。為解決這一問題,該文著重研究了施工作業區的施工強度對作業區外社會車輛速度的影響。通過德爾菲法和層次分析法的應用,得出不同作業強度下的推薦限速值,并給出了動態限速的實現方式,為作業區的動態限速管控提供了有力支撐,為實現施工與運營的和諧共生提供了新思路。
關鍵詞 高速公路;養護作業;施工強度;限制速度
中圖分類號 U418.2 文獻標識碼 A 文章編號 2096-8949(2024)15-0191-04
0 引言
隨著我國交通運輸業的迅猛發展和機動車保有量的持續增長,高速公路路面受到不同程度的損害,進而促使養護工程數量不斷攀升。據統計,截至2022年底,我國公路里程達到535.48萬千米,公路養護里程達535.03萬千米,占公路里程比重的99.9%[1]。在高速公路養護期間,由于車道數量的減少,占道養護作業區的通行能力受到顯著影響。此外,駕駛員在上游過渡區的頻繁減速和換道行為加劇了養護作業區的交通復雜性,使該區域成為交通擁堵和事故易發區。其中,速度差過大是引發交通事故的關鍵因素。因此,對養護作業區路段實施有效的速度管理策略,對于提升高速公路養護作業路段的通行效率及保障行車安全至關重要。
《道路交通標志和標線第4部分:作業區》(GB5768.4—2017)[2]根據設計速度不同,規定了作業區限速值為80 km/h、70 km/h、60 km/h、40 km/h、30 km/h和20 km/h。《公路養護安全作業規程》(JTG H30—2015)[3]中根據不同設計速度,規定了80 km/h、60 km/h、40 km/h和20 km/h的限速值。另外,作業區限速過渡為每200 m降低20 km/h。傳統的養護作業區限速方法主要采用靜態限速方式,缺乏靈活性和適應性,難以應對養護作業區交通環境的實時變化。
高速公路養護作業區限速管理是提高交通安全,優化養護作業區交通組織的重要措施。可變限速技術主要根據高速公路實時變化的交通流參數以及其他影響因素,通過一定的可變限速算法實時計算可變限速值,并將限速值顯示在可變限速標志上,以此來實現車速管理。目前可變限速的研究主要有可變限速閾值研究,限速值算法確定及效果評價,可變限速交通標志布設等方面[4]。
養護作業期間對作業路段的交通流進行速度控制可以很好地平滑交通流狀態的變化,對提升作業路段的交通安全及運行效率有著重要的意義。而當前大部分作業路段所采用的速度控制手段仍為全車型統一靜態限速控制,限速值的選取多根據規范建議值進行選取,目前國家標準《道路交通標志和標線第4部分:作業區》(GB5768.4—2017)和行業標準《公路養護安全作業規程》(JTG H30—2015)中針對作業區限速的相關規定只考慮了公路的設計速度,在設計速度的基礎上對作業區段限速進行了折減,但沒有考慮施工作業強度、夜間施工和惡劣天氣等因素對于作業區段車輛速度的影響。該文重點針對養護作業施工強度對速度的影響進行分析,以細化養護施工作業區限速值,對提升道路行車安全和通行效率有重要意義。
1 作業區路段動態限速的影響因素分析
可變限速的建模大部分用最優控制法,控制目標多數以車輛運行效率、交通安全、燃油消耗等為主,約束條件大多考慮道路線形、交通環境、天氣及能見度等對車輛行駛速度影響。首先針對施工作業強度、夜間施工、天氣環境對速度的影響進行定性分析。
1.1 施工作業強度
高速公路養護施工期間,養護施工人員、施工機械和作業區內的通行車輛構成了一個危險的交通環境。施工作業強度主要是指在養護施工過程中,使用不同類型的施工機械進行施工、配備施工人員及機械與人員作業情況對交通運行環境的影響程度。一般來說,施工機械設備越大型,設備所占的空間往往越大,駕駛員越謹慎,行駛至該路段時減速意愿越強烈;施工作業人員越多,施工環境便更復雜,相應地會影響行車速度。
1.2 夜間施工
夜間由于高速公路交通量較小,施工對交通干擾相對較小,不易產生交通擁堵,施工設備和材料容易運輸,同時可以降低能源消耗,減少環境污染,因此,許多項目選擇在夜間進行施工。
在駕駛過程中,駕駛人通過自身感覺器官從外界感知到各種形式的信息,其中80%以上的信息是由視覺器官所獲得的,是駕駛人接受信息的重要渠道,對交通安全起著至關重要的作用。夜間行車,由于光照強度不足,物體能見度和辨識度較低,駕駛人感知信息的難度較大,獲得相關信息會不足,加之受到車道寬度變窄、車道轉換等施工環境的影響,駕駛人容易產生疲勞,極易造成嚴重的交通事故。
1.3 天氣環境
天氣狀況對公路網內的每一條公路的運行都會產生影響,并引起我國各級交通管理部門對其產生影響的長期關注。有些惡劣天氣的出現甚至會導致高速公路入口封閉以及道路設施的損壞。即便是小范圍的天氣事件也會造成路面濕滑,降低車輛運行速度,增大速度差,增大延誤,并造成潛在事故的發生。尤其是在惡劣氣象條件下若公路上存在施工作業區或有進行中的施工作業,則易發生交通事故。
通常引起交通管理部門強烈關注的不利天氣有:強降雨/洪水、冰雪(路面結冰)、低能見度天氣(如濃霧、吹雪、沙暴等)、大風等。這些不利天氣往往會降低道路能見度或道路狀況等級。
2 作業區施工強度對速度的影響分析
該文重點針對施工強度對速度的影響進行定量分析。根據多年養護經驗及往年的交通事故統計數據表明,當高速公路作業區同時存在大型機械設備和工作人員進行施工養護作業時,對運行車速影響最大;由于施工人員具有不確定性,因而僅施工人員進行養護施工作業次之;再次是僅大型機械進行施工,相比起前兩種施工環境,此時給駕駛員的心理壓力較小,因而駕駛員行駛至該路段時減速程度會相對變小。因此,對確定不同施工作業強度的作業區的推薦限速值需分開討論,即把施工作業強度細分為無機械和人員、有人和無大型機械、有機械和無人以及有機械和人員這四種因素進行考慮。
該文采用德爾菲法和層次分析法將定性與定量的決策相結合,將決策過程層次化、數量化的過程,將四種因素進行對比與量化,確定不同施工作業強度下的限速值。
2.1 矩陣構建
判別矩陣的元素是同一層次某兩因素相對重要性的比值。這種相對重要性是指互相比較的兩個因素,對于某個指標(上一層次的某個因素)而言的相對重要性程度。
對于某一層次,n個元素之間相對重要性的比較得到一個兩兩比較判別矩陣:A=(aij)n×n。其中,判斷矩陣A滿足條件:aijgt;0, aji=aij-1, aji×aij=1。
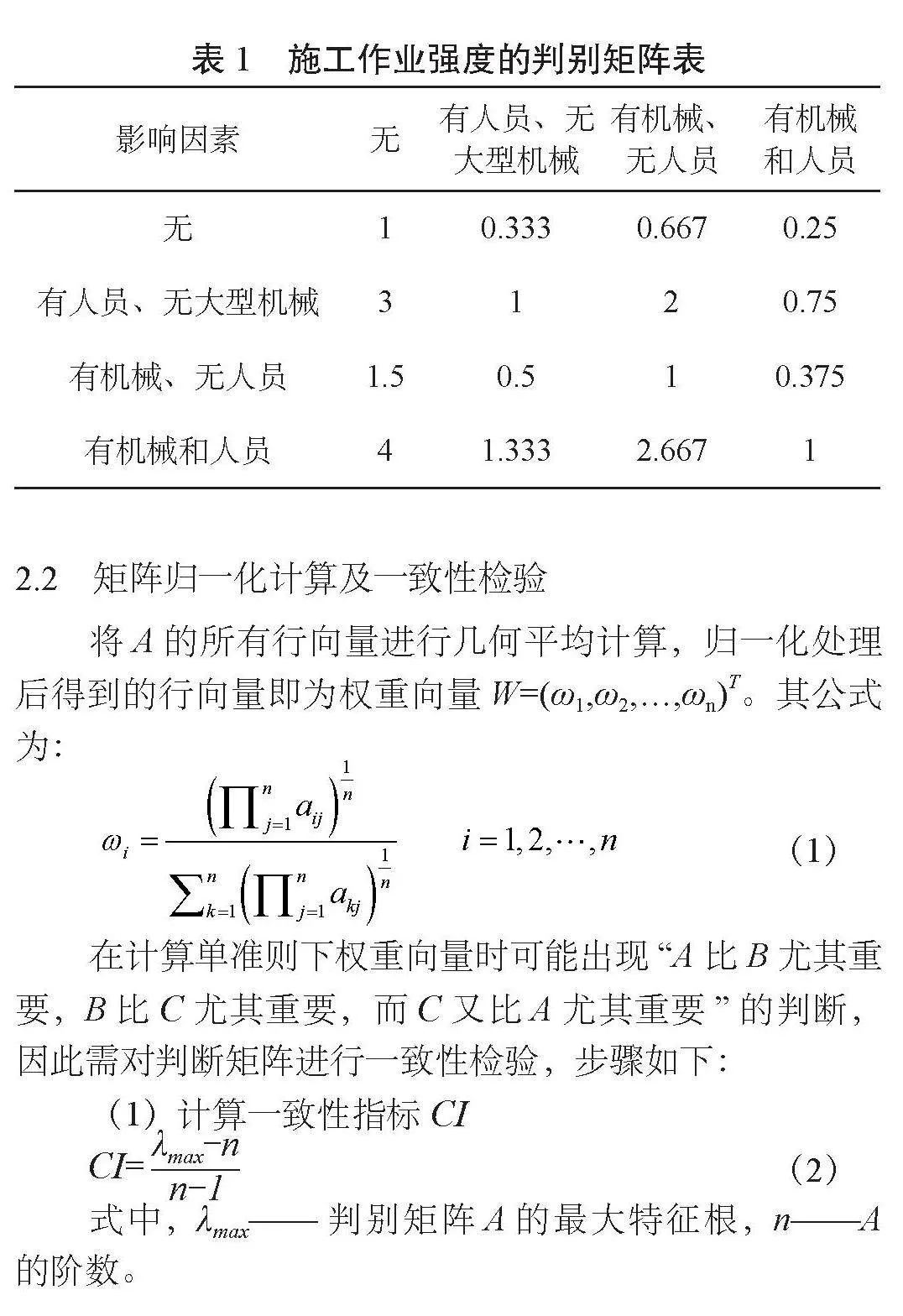
根據對駕駛干擾的程度作為評判標度,設置關于施工作業強度的判別矩陣A。例如,有機械和人員施工的影響必然大于有機械無人員施工,則兩者比值應大于1。采用德爾菲法得到具體判別矩陣A,如表1所示。
2.2 矩陣歸一化計算及一致性檢驗
將A的所有行向量進行幾何平均計算,歸一化處理后得到的行向量即為權重向量W=(ω1,ω2,…,ωn)T。其公式為:
(1)
在計算單準則下權重向量時可能出現“A比B尤其重要,B比C尤其重要,而C又比A尤其重要”的判斷,因此需對判斷矩陣進行一致性檢驗,步驟如下:
(1)計算一致性指標CI
CI=
式中,λmax——判別矩陣A的最大特征根,n——A的階數。
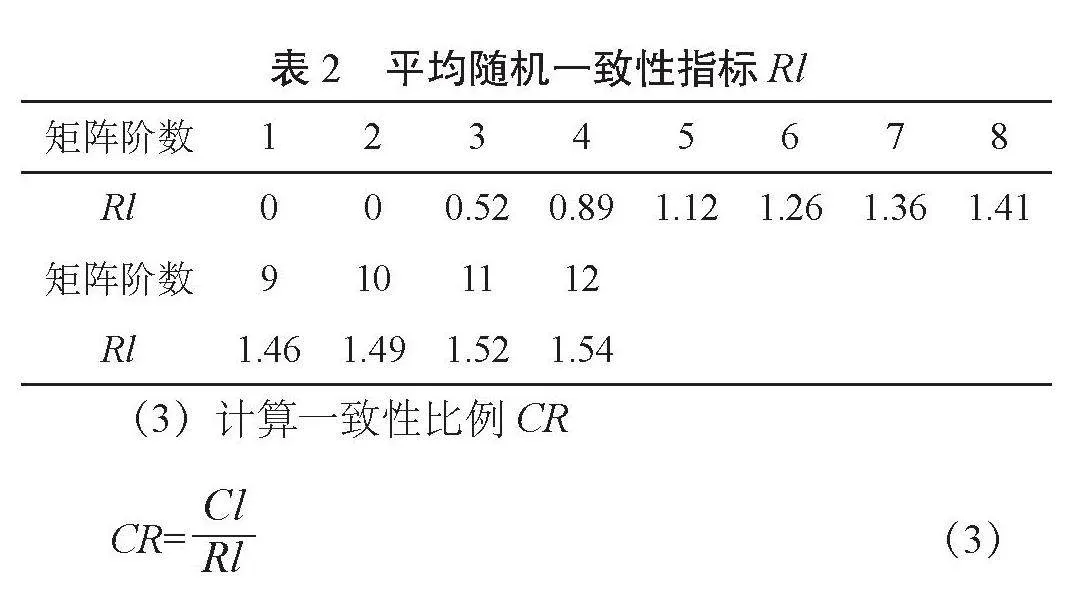
(2)查詢平均隨機一致性指標Rl
1~12階矩陣計算1 000次得出的平均隨機一致性指標值,如表2所示。
(3)計算一致性比例CR
CR= (3)
當CR≥0.1時,需對判別矩陣作出修正;當CR≤0.1時,判別矩陣的結果符合一致性檢驗。
基于公式(2)與公式(3)對矩陣進行一致性檢驗,λmax矩陣A的最大特征值為3.999,一致性比例CR為-0.003 7,小于0.1符合一致性檢驗。
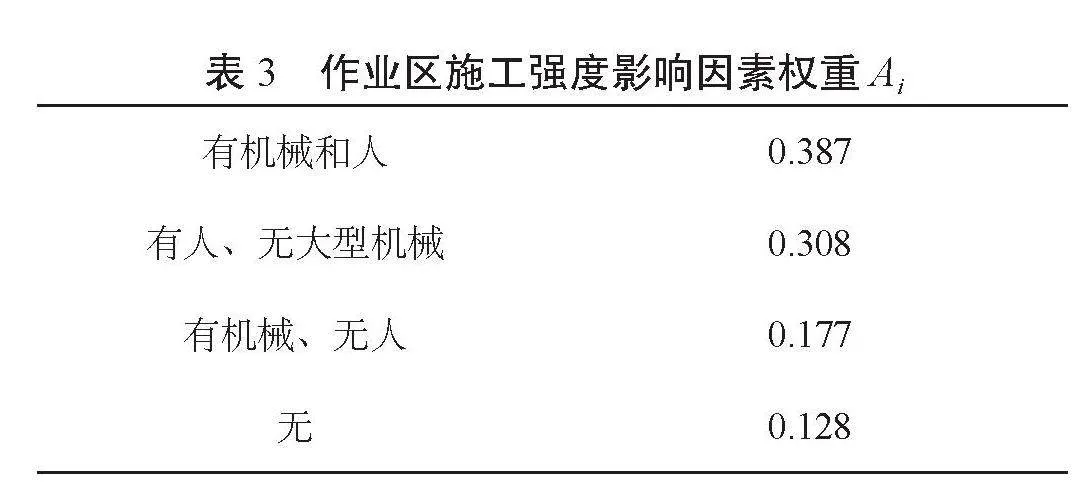
基于表1對施工作業強度矩陣A進行歸一化計算得到各影響因素權重,如表3所示。
作業區針對不同施工強度的速度折減模型為:
V=Vc×fi" " (4)
式中,V——施工作業區的運行速度;Vc——當作業區所在位置無其他限速時采用的設計速度,如果有其他限速,那么應該在原限速的基礎上折減。例如,若由于路側存在高風險或者曲線半徑太小因素,在施工前已經有限速時,就應該在原限速值基礎上折減。
fi" =1-Ai (5)
一般來說,高速公路限速值是整數,因此,出于實際情況及安全考慮,對模型(4)計算的運行速度結果以10 km/h的變化幅度降速取整,例如當計算的運行車速值在80~89 km/h范圍之內,推薦限速值取為80 km/h;運行車速位于70~79 km/h時,推薦限速值取為70 km/h,以此類推。
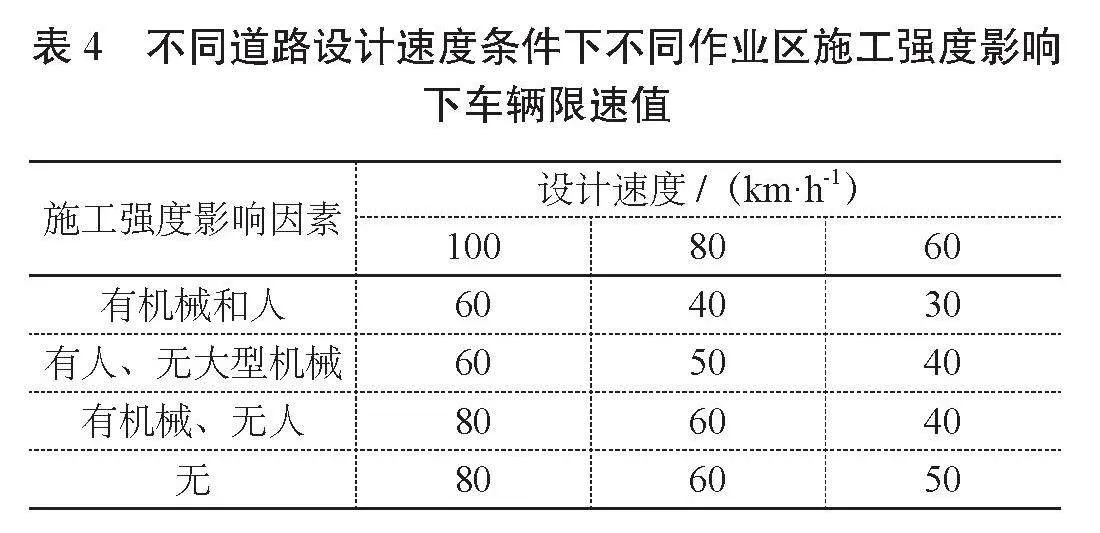
2.3 限速值的確定
基于以上分析與計算,針對不同道路限速條件下不同施工作業強度下車輛限速值如表4所示。
3 作業區動態限速策略的實現
根據《道路交通標志和標線第4部分:作業區》(GB5768.4—2017)與《公路養護安全作業規程》(JTG H30—2015),施工作業區的限速標志一般為靜態的標志牌,基于上述研究,作業區的限速值受施工強度、惡劣天氣等多因素的影響,因而建議施工作業區采用可變標志進行動態限速。
公路施工作業區分為警告區、上游過渡區、緩沖區、工作區、下游過渡區、結束區,由于施工作業區區段較長,駕駛員難以在看到限速標志短時間內安全達到限速,因而需要采用逐級限速的方式使駕駛員安全地達到限制速度,建議施工作業區各區段的限速標志同樣采用可變標志,互相聯動,實現動態限速。
此外,施工作業區的限速標志也需與公路斷面門架式的可變情報板進行動態聯動,施工作業區的位置與公路斷面可變情報板之間位置關系不同采取的聯動方式也不同。
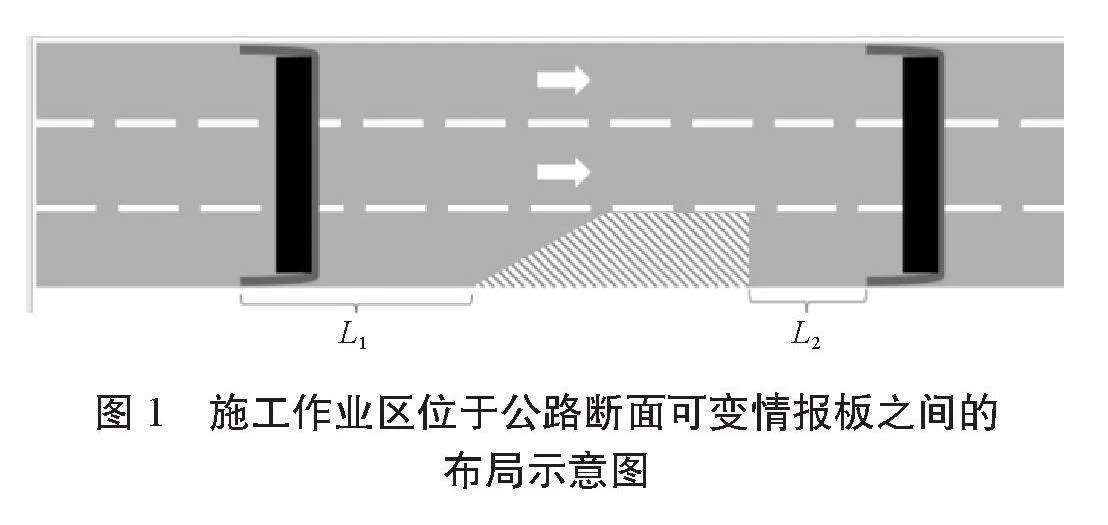
3.1 施工作業區位于兩個公路斷面可變情報板之間
若施工作業區全長位于連續兩個公路斷面可變情報板之間,如圖1所示。施工作業區的起點與上游斷面可變情報板之間的距離為L1,施工作業區的終點與下游斷面可變情報板之間的距離為L2。
布局示意圖
公路斷面可變情報板與養護施工作業區可變情報板聯動發布策略為:
(1)若距離L1gt;2 km,公路斷面可變情報板不顯示
作業區相關信息;
(2)若距離L1≤警告區第一個標志的距離,公路斷面可變情報板顯示內容則參照《道路交通標志和標線第
四部分:作業區》(GB5768.4—2017)與《公路養護安全作業規程》(JTG H30—2015)顯示相應的內容;
(3)若距離L2≤1 km,公路斷面可變情報板顯示內容則根據作業區的限速值進行逐級提速。
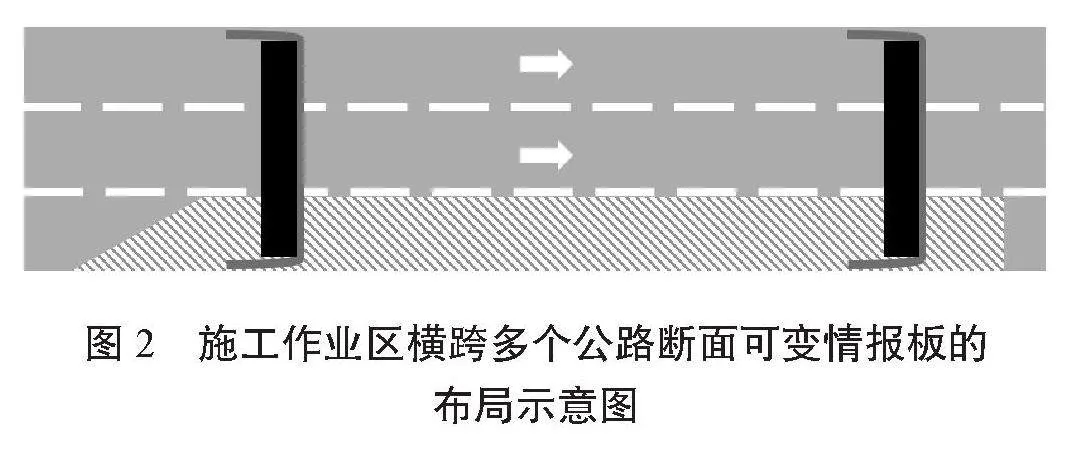
3.2 施工作業區橫跨多個公路斷面可變情報板
若施工作業區全長橫跨多個公路斷面可變情報板,如圖2所示。公路斷面可變情報板顯示內容則重復顯示施工區的限速要求。
4 結論
對于長時間占路養護施工作業,靜態固定的限速值難以適應施工路段復雜客觀環境的限速需求。該文根據不同施工強度對速度限制提出了建議,對于實施作業區動態限速控制提供了技術支撐。動態限速控制可以根據實時交通流狀態制定出合理限速方案,從而實現對交通流運行進行主動調節,可在預防事故的發生和提高道路通行效率方面發揮重要的作用。
該文只定量分析了不同施工強度對作業區速度的影響,定性分析了夜間施工、天氣環境對作業區速度的影響,路側風險、臨時交通安全設施可靠度等因素均會對作業區段車輛速度產生影響,后續的研究中將會進一步綜合考慮。
參考文獻
[1]中華人民共和國交通運輸部.2022年交通運輸行業發展統計公報[N].中國交通報,2023-06-16(2).
[2]《道路交通標志和標線 第4部分:作業區》(GB5768.4—2017)[S].北京:中國標準出版社,2018.
[3]《公路養護安全作業規程》(JTG H30—2015)[S].北京:人民交通出版社,2015.
[4]劉博蓉.基于交通沖突的高速公路養護作業區可變限速模型及標志布設研究[D].西安:長安大學,2020.
收稿日期:2024-04-03
作者簡介:王善偉(1982—),男,本科,高級工程師,研究方向:交通工程。
通信作者:李佳輝(1989—),女,碩士,高級工程師,研究方向:交通安全。
猜你喜歡
建材發展導向(2021年20期)2021-11-20 05:43:18
鴨綠江(2021年17期)2021-10-13 07:05:32
中國交通信息化(2020年8期)2021-01-26 00:51:18
中國交通信息化(2020年10期)2021-01-14 03:29:50
中國交通信息化(2019年6期)2019-08-23 08:28:40
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
中國交通信息化(2017年3期)2017-06-08 06:09:23
中國交通信息化(2016年9期)2016-06-06 07:42:10
小說月刊(2014年4期)2014-04-23 08:52:20
筑路機械與施工機械化(2014年5期)2014-03-01 02:59:08