基于GICP算法的多深度相機點云配準方法研究
2025-03-01 00:00:00徐大帥楊寬張峻銘黃璐
河南科技 2025年2期

摘 要:【目的】針對深度相機視角有限,難以捕捉復雜場景內的所有細節這一問題,提出一種基于GICP算法實現兩臺深度相機點云配準方法。【方法】首先,制作一個立方體標定物,并用兩臺深度相機進行驗證實驗。其次,通過深度相機采集并融合不同視角下物體模型的點云數據,用Voxel Grid濾波器對點云數據進行預處理。最后,使用GICP算法對點云計算最優變換進行配準,實現點云融合。【結果】采集原始點云數據后,計算并比較基于GICP算法、ICP算法的處理結果,從而驗證基于GICP算法的有效性。結果顯示,相較于傳統的ICP算法,GICP算法的運行時間減少,且精度提高18.7%。【結論】基于GICP算法能提升多深度相機的點云融合效果,適合在較大范圍的真實場景中應用。
關鍵詞:點云配準;深度相機;GICP算法;數據融合
中圖分類號:TP391.4" " "文獻標志碼:A" " 文章編號:1003-5168(2025)02-0020-04
DOI:10.19968/j.cnki.hnkj.1003-5168.2025.02.004
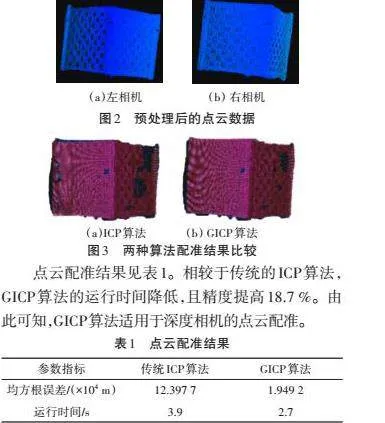
Abstract: [Purposes] In view of the limited viewing angle of the depth camera, it is difficult to capture all the details in the complex scene. This study proposes a point cloud registration method for two depth cameras based on the GICP algorithm to expand the perception range of the depth camera. [Methods] Firstly, a" cube calibrator was made and two depth cameras were used to verify the experiment. Secondly, the point cloud data of object models from different perspectives of two cameras was collected and fused by the depth camera, and the point cloud data was pre-processed through Voxel Grid filter. Finally, this paper uses GICP algorithm to compute the optimal transformation of point cloud to achieve point cloud fusion." [Findings] After collecting the original point cloud data, the processing results based on GICP algorithm and ICP algorithm are calculated and compared, so as to verify the effectiveness of GICP algorithm. The experimental results show that compared with traditional ICP algorithm, the running time of GICP algorithm is reduced, and the accuracy is increased by 18.7%. [Conclusions] The GICP-based algorithm improves the point cloud fusion effect of multi-depth camera, and is more suitable for application in a wide range of real scenes.
Keywords: point cloud registration; depth camera; GICP algorithm; data fusion
0 引言
當前科技迅速發展,深度相機在三維重建與建模[1]、虛擬現實與增強現實[2]、手勢識別與追蹤[3]等應用領域展現出巨大優勢,具有廣泛的應用前景。使用深度相機采集目標及環境的深度信息,并對空間中的物體進行識別。相較于傳統的2D相機,3D相機通過增加一維的深度信息,能更準確描述真實世界的信息特征。同時,相較于其他深度傳感器,深度相機還具有更快的速度和更高的實時性,是人機協作中的一種重要感知設備[4]。
點云配準[5]是三維視覺領域中的一個關鍵步驟,對不同視角獲取的點云數據進行空間變換對齊,使其在統一的坐標系中實現匹配。迭代最近點(Iterative Closest Point,ICP)算法是其中的一種經典方法[6],依賴于點云數據中特征點的選擇,通過迭代優化點云間的對應關系來配準。但ICP算法對初始位置較為敏感,很難保證達到全局最優。隨著深度學習的發展,PointNetLK[7]、PointAF[8]等網絡通過學習點云的特征表達,克服傳統方法對特征工程的依賴性,提高配準的速度和準確性,但網絡結構較為復雜,結果難以復現。此外,基于概率密度函數的方法將點云視為概率分布模型,如高斯混合模型(GMM)[9],重構配準問題為分布對齊問題[10],這些方法在處理噪聲、異常值方面具有優勢,但計算復雜度較高。
針對上述算法存在的缺陷,本研究提出基于廣義迭代最近點(Generalized Iterative Closest Point,GICP)算法的深度相機點云配準方法[11]。GICP算法通過改進和泛化經典的ICP算法,在距離度量中引入了點到平面的距離,使其在處理不同表面特性的點云時更加有效。GICP算法根據距離度量計算目標函數相對于變換參數的梯度,并使用優化方法找到二者之間的最佳變換,對噪聲和部分遮擋具有更好的魯棒性,且適用性廣,適用于不同類型的表面。
1 原理概述
1.1 傳統ICP算法
傳統的ICP通過迭代方式來處理源點云和目標點云,并逐步最小化點云之間的距離,實現兩者間的對齊。對目標函數進行優化,見式(1)。
1.2 GICP算法
GICP算法是在經典的ICP點云配準算法基礎上改進而來的,通過引入高斯概率模型來優化點云配準過程。源點云記為 [A=aii=1,…,N]、目標點云記為 [B=bii=1,…,N],源點云和目標點云中每個點位及其領域點位組成的小的點云集合滿足高斯分布模型,見式(3)。
GICP算法通過在距離度量中引入點到平面的距離來找到二者之間的最佳變換(旋轉和平移),從而能更好地利用點云的局部結構信息,適用于不同類型的表面,包括曲面和平面。同時,對噪聲和部分遮擋具有更好的魯棒性。在某些情況下,GICP的配準精度比傳統的ICP更高,適用于多種實際應用場景。
2 深度相機點云數據采集
2.1 Kinect硬件
本研究使用的深度相機為Azure Kinect,其配置了100萬像素ToF式(Time-of-Flight)深度傳感器和1 200萬像素RGB攝像頭。ToF式深度相機通過發射紅外光,并計算發射與接收時間差,從而得到每個像素點的深度信息,并生成詳細的三維點云圖像數據,實現對不同條件下的深度感知和深度圖像采集。ToF式深度相機生成點云的優勢在于測量速度快、適合實時應用。此外,每個Azure Kinect設備附帶3.5 mm同步端口,支持多設備同時連接,多個設備同步能增加數據的準確度。
2.2 點云數據采集
Azure Kinect深度相機生成點云過程如下。紅外光源發射器(IR emitter)發射的紅外光到物體表面后,深度傳感器捕捉反射回來的紅外光波,并測量時間差。在計算出距離后,生成深度圖,根據深度圖中的每個像素點在圖像中的位置和深度值轉換后生成三維點云。上述點云數據是通過兩臺Azure Kinect深度相機拍攝現實物體模型采集到的。用于采集點云數據的實物模型如圖1所示。
3 試驗分析
在Windows環境中,使用C++語言對數據集進行仿真分析,所選的數據集包括物體等環境信息。試驗基于開源點云庫PCL,封裝庫Azure Kinect DK。
3.1 點云預處理
通過Voxel Grid濾波器對初始點云進行體素化,在保持點云原本形態的基礎上,減少點云數量,實現對點云數據的下采樣。將上述原始點云數據進行濾波預處理,得到的點云數據如圖2所示。由圖2可知,經Voxel Grid濾波器處理后,將點云數據簡化為較小的體素,減少點云密度,從而減少計算量和存儲空間。濾波處理前每幀原始點云數量為2 973個,經過體素化處理后,數量降為每幀1 362個,降低了54%。
3.2 GICP算法點云配準分析
為了驗證GICP算法在深度相機點云配準上的有效性,在Windows系統中進行仿真試驗,并以傳統的ICP算法為對照,結果如圖3所示。圖3(a)為傳統ICP算法的點云匹配結果,基本接近實物輪廓,但部分點云數據匹配結果較差;圖3(b)為GICP算法下的點云匹配結果,由于GICP算法引入高斯概率模型,不僅考慮了點到點的距離,還考慮了點到平面的距離。在面對點到平面的情況時,能更好地利用點云的局部結構信息。相較于傳統的ICP算法,GICP算法點云配準的精度和魯棒性有了較大的提升。
4 結語
針對傳統點云配準算法ICP存在的速度慢、易形成局部最優等問題,本研究提出一種將物體模型生成的點云數據通過GICP算法融合的方法。GICP算法在距離度量中引入了點到平面的距離,由于物體模型具有平面特征,在搜索對應點時,可利用目標點云中平面的局部結構,使其在處理點云時更加有效。此外,本研究通過兩臺Azure Kinect 深度相機拍攝同一物體進行試驗驗證,點云預處理后利用GICP算法進行點云配準,并與傳統的ICP算法進行對比,結果顯示,GICP算法融合效果良好,能有效彌補單深度相機點云數據視野角度窄、易出現空洞等問題,可應用于空間三維建模等。
參考文獻:
[1]付燕平,嚴慶安,廖杰,等.基于彩色圖像引導的RGB-D相機追蹤與三維重建[J].武漢大學學報(工學版),2022,55(1):92-100.
[2]廖禹韜,吳黎明,王桂棠,等.基于深度相機的金屬柜體三維重建[J].電子測量技術,2023,46(20):36-40.
[3]孫曉明,任磊.RGB-D相機的三維重建綜述[J].軟件導刊,2021,20(5):249-252.
[4]朱明超,呂鎮炯,鄧民翰,等.基于多傳感器融合的自主導航ROS智能機器人[J].自動化應用,2024,65(13):1-4.
[5]李建微,占家旺.三維點云配準方法研究進展[J].中國圖象圖形學報,2022,27(2):349-367.
[6]戴靜蘭,陳志楊,葉修梓.ICP算法在點云配準中的應用[J].中國圖象圖形學報,2007(3):517-521.
[7]李榮華,董欣基,薛豪鵬,等.改進PointNetLK的點云智能配準與位姿圖優化方法[J].宇航學報,2022,43(11):1557-1565.
[8]劉界鵬,胡驍,李東聲,等.基于深度學習的室內多視角點云自動化配準方法[J/OL].土木與環境工程學報(中英文),1-11[2024-09-01].http://kns.cnki.net/kcms/detail/50.1218.TU.20240723.1821.002.html.
[9]林桂潮,唐昀超,鄒湘軍,等.融合高斯混合模型和點到面距離的點云配準[J].計算機輔助設計與圖形學學報,2018,30(4):642-650.
[10]楊磊,李桂菊,王麗榮.面向場景重構的多序列間配準[J].光學精密工程,2015,23(2):557-565.
[11]CHEN Z J,XU Y,YUAN S H,et al.iG-LIO:An incremental GICP-based tightly-coupled LiDAR-inertial odometry[J].IEEE Robotics and Automation Letters,2024,9(2):1883-1890.
