基于STM32的自動農藥噴灑裝置
2025-03-04 00:00:00倪咸隆劉培學蘭學勇宋新城
物聯網技術 2025年5期
摘 要:針對現有農藥自動噴灑裝置存在嚴重的農藥浪費現象,設計了一款以STM32為主控MCU,基于圖像識別可以實現農藥精準噴灑的裝置。用戶將該裝置放到指定位置后,通過下達開始指令,攝像頭開始旋轉,圖像識別模塊對待噴灑物體進行圖像抓取;抓取成功后利用串口通信將數據傳遞回STM32,STM32根據傳回的數據控制水泵的通斷、伸縮桿的高低、噴頭的角度;最后根據風速風向感應模塊測得的數據實時調節噴頭的角度,實現精準化噴灑。本裝置通過引入智能化設備和技術實現精準化噴灑,以減少農藥使用和農藥殘留,使農業生產更加科學、高效、可持續發展。
關鍵詞:智能化技術;農藥精準噴灑;自動化;圖像識別;風速風向感應;數據采集
中圖分類號:TP23 文獻標識碼:A 文章編號:2095-1302(2025)05-0-03
0 引 言
隨著自動化技術的不斷發展,農業自動化產業也在迅速擴展。自動化機械噴灑是我國農業領域的重要農藥噴灑方式,同時農藥精準噴灑問題已成為農業領域的重要研究內容。目前,我國對農藥精準噴灑控制系統的開發相對滯后,特別是在農藥的使用效率和農藥噴灑裝置方面有待進一步研究。以往操作人員在進行噴藥作業之前,總是用肉眼判斷農作物的病蟲害情況,這不僅不能準確地獲取農作物的病蟲害狀況,還會存在農藥浪費及食品污染等一系列問題[1-3]。針對上述問題,本文在已有研究的基礎上設計了一款基于機器視覺技術與風向感應技術的精準農藥噴施裝置。
目前,現有的農藥精準噴灑多采用單一的機器人視覺技術[4-8],并未與風速風向傳感模塊相結合。進行噴灑作業時,也未參考當時的風速風向,容易造成農藥的大量浪費。
本設計的創新之處在于,借助STM32將K210攝像頭AI視覺模塊[9-10]和超聲波風速風向傳感器結合到自動農藥噴灑裝置上,可以實時調整噴灑裝置與待噴灑樹木的角度,實現精準噴灑。
1 系統總體設計
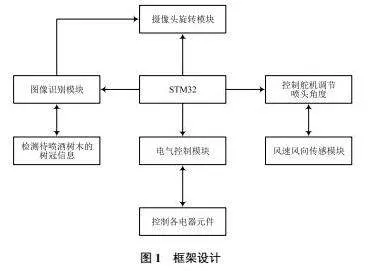
本文基于STM32設計了能夠精準噴灑的農藥自動噴灑裝置。該裝置包括噴灑車運動模塊、電源模塊、K210 AI視覺模塊、超聲波風速風向傳感模塊、抽水模塊、定點噴灑模塊。本系統通過搖桿控制小車運動,并用K210檢測周圍環境樹干分布信息,及時調整伸縮桿與噴槍的角度,最后利用風速風向傳感模塊檢測到的風向、風量、氣壓等信息,通過485轉232及時傳回STM32,在STM32中進行數據處理后通過PWM控制噴槍角度實現精準化噴灑。系統整體框架設計如圖1所示。
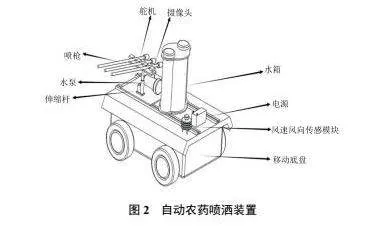
系統結構設計如圖2所示。機身大體呈長方體,從前到后依次是移動底盤、風速風向感應器、電源、水箱、水泵、伸縮桿、舵機、噴槍、攝像頭。移動底盤呈長方體樣式,可以更好地承重。將圖像識別模塊置于伸縮桿上方可以更好地觀測待噴灑物體信息。將舵機安裝在伸縮桿上方并與噴槍結合,可實現上、下、左、右四個方向的靈活調節。該裝置與K210相連接,有助于系統實現精準噴灑功能。將超聲波風速風向感應模塊放置在小車前端開闊的地方,沒有水箱的阻擋能夠精準地測量當時的風量風速等信息。
2 系統硬件設計
噴灑車硬件主要由電源模塊、K210 AI視覺模塊、超聲波風速風向傳感模塊、抽水模塊、定點噴灑模塊、主控模塊組成。
2.1 主控模塊
主控模塊[11]選擇STM32。相較于其他單片機,STM32具有高性能、豐富的外設、豐富的軟件支持等優勢。STM32系列單片機采用ARM Cortex-M內核,具有高性能和低功耗的特點,能夠滿足復雜應用的需求。STM32單片機集成了豐富的外設,包括通用定時器、串行通信接口、模擬數字轉換器等,可充分滿足圖像識別模塊的開發需求。STM32微控制器[7]內置多個時鐘源和定時器模塊,用于生成各種時序信號、定時器中斷、PWM輸出等功能,可實時控制攝像頭活動抓取物體圖像。STM32微控制器通常還包含模擬外設,如ADC(模數轉換器)、DAC(數模轉換器)、比較器等,能夠處理各種模擬信號,對K210反饋的信號也能及時做出回應。
2.2 電源模塊
電源模塊采用12 V 9AH/20HR康爾達閥控式鉛酸蓄電池。該電池采用恒壓充電方式,恒壓充電方式可以根據電池的狀態和充電情況自動調整充電電流,從而控制充電速度,確保電池充電過程穩定、高效,且恒壓充電方式可以有效地保護電池免于過充的風險。一旦電池的充電電流下降到一個很小的值,充電器會停止提供恒定的充電電壓,從而避免電池過充,延長電池的使用壽命。另外較快的充電速度能夠使噴灑裝置的工作時間延長,獲得更長的待機時間。
2.3 圖像識別模塊
圖像識別模塊選擇K210攝像頭AI視覺模塊。K210的工作電壓范圍為1.8~3.3 V,STM32微控制器的工作電壓范圍通常為1.8~3.6 V。K210可不經過降壓模塊直接與STM32微控制器連接。
K210作為一款人工智能處理器,可以用于進行物體圖像的處理和分析,包括目標檢測、物體識別等任務。通過在K210上部署適當的神經網絡模型,可以實現對物體圖像的識別和分類。雖然K210可以進行物體圖像的處理和分析,但要實現物體的抓取功能,還需要結合其他硬件設備,所以在K210下方與舵機相連,通過舵機移動K210的位置來實現對物體的實時抓取。
K210與主控STM32模塊連接。K210的UART TX引腳連接到STM32的PA10(RX)引腳,K210的UART RX引腳連接到STM32的USART1 PA9(TX)引腳。K210的UART RTS(請求發送)引腳連接到STM32的UART CTS(清除發送)引腳,用于硬件流控制。
2.4 風速風向傳感模塊
超聲波風速風向傳感模塊可通過對當前環境風速風量的測量實時調節噴槍角度,輔助圖像識別模塊實現精準噴灑。超聲波風速風向傳感模塊還可通過對當前環境信息的采集獲得當時的風速、風向、溫度、濕度等信息,將采集到的數據采用串口通信方式傳輸。首先通過RS 485模塊將RS 485信號轉換為RS 232信號,再將RS 485的發送線連接到STM32的PB10引腳,接收線連接到PB11引腳,以實現RS 485通信。
2.5 抽水模塊
采用12 V隔膜水泵,水泵泵體采用靜音膠墊,防震效果好。配套大電流DC母座接口確保大電流通過,通過大電流確保大流量。自帶無級調速開關,壓力、流量大小可調,還可以調節水泵低速工作以延長壽命,降低噪音。
產品參數:電壓為12 V,流量為8 L/min,水管內外徑規格為10 mm×12 mm,水泵尺寸為11 cm×15 cm,可連續工作4 h,實現超長續航。
2.6 定點噴灑模塊
定點噴灑模塊由噴槍與舵機共同組成。本文中噴頭選用農用打藥機高壓水槍,水槍為不銹鋼材質,并具有可調節噴霧的功能。通過調節手柄,可控制出水模式以及調整霧化程度,具有霧化細膩、噴射距離遠的優點。另外,還帶有手柄部分,便于安裝固定。舵機采用DS5160舵機,工作電壓為6 V,可直接與STM32連接,且具有180°大扭矩,角度可控。
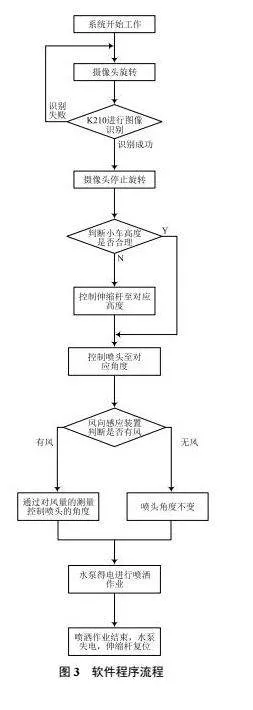
3 系統軟件設計
本系統以STM32F103C8T6為主控芯片,使用PWM(脈沖寬度調制)功能控制舵機的轉向,實現K210左右兩個方向對外界物體的抓取,完成圖像識別功能。識別成功后STM32通過串行通信的方式對K210采集到的農作物信息進行整理分析;然后通過調節伸縮桿的高度來實現初步定位,再通過風速風向感應模塊來獲取當時的風速風向信息,將收集到的信息通過RS 485轉為RS 232信號并傳輸到STM32;最后經過信號處理反饋到控制噴槍的舵機上,實現角度微調,完成精準噴灑。軟件程序流程如圖3所示。
4 系統調試
4.1 系統運行
將程序導入STM32后接通電源系統開始工作,此時攝像頭開始旋轉,K210模塊開始尋找待測目標信息,風速風向傳感器指示燈亮起,檢測到待噴灑農作物的信息時伸縮桿調節上下位置,噴槍舵機也開始轉動調節噴槍,待穩定后水泵開始工作。
4.2 程序數據調試
通過在不同環境條件下的調試測試發現,設備舵機轉動靈活、圖像識別穩定、噴槍角度調節精準、水泵壓力足夠、續航時間長,可完成多種小型草本、木本的噴灑工作。
5 結 語
本文以STM32F103C8T6為主控芯片,該芯片強大的ARM Cortex-M內核使其具有高性能和低功耗的特點,能夠滿足各種復雜應用的精準噴灑需求。在圖像精準識別部分,基于圖像識別技術對目標作物進行信息收集,實現精準定位;同時又以風速風向傳感技術為輔助,兩技術交替配合、相互協作,實現精準噴灑、智能化噴灑;此外超強續航的電池可為噴灑裝置提供超長待機時間,從而提高工作效率。
在實際作業過程中,自動噴灑系統可以根據作物生長的實際需求和病蟲害情況,精準控制農藥的噴灑量和噴灑位置,避免浪費和過量使用農藥,減少對環境的污染,保護生態環境。期望本文研究能為農藥精準噴灑問題提供新的解決思路。
參考文獻
[1] 劉金浩. 帶農作物識別功能的無人機農藥噴灑系統的研究[J].農業災害研究,2020,10(7):185-186.
[2] 曾新洲. 基于大數據的施藥平臺農藥噴灑定量分析研究[J].農機化研究,2020,42(9):243-247.
[3] 高傳友. 用于園林軟景觀管理的噴灌裝置設計分析[J].農機化研究,2021,43(10):28-32.
[4]李顏,黃維宸.計算機視覺技術及其在電力系統自動化中的應用[J].中小企業管理與科技(上旬刊),2019(4):183-184.
[5]胡智禎﹐萬晉廷,王毓瑋.論計算機視覺技術在自動化中的應用[J].南方農機,2017,48(5):125.
[6]劉俞伶﹒計算機視覺技術及其在電力系統自動化中的應用[J].中國新技術新產品,2012(20):16-17.
[7]鄧朝翕.電力系統自動化中計算機視覺技術的應用[J].黑龍江科技信息,2012(12):52.
[8]康飛龍,李佳,劉濤,等.多類農作物病蟲害的圖像識別應用技術研究綜述[J].江蘇農業科學,2020,48(22):22-27.
[9]史冰瑩,李佳琦,張磊,等.基于CNN的農作物病蟲害圖像識別模型[J].計算機系統應用,2020,29(6):89-96.
[10]張英旭.農業機器人移動平臺數據采集系統及伺服控制系統的研制[D].天津:河北工業大學,2013.
[11] ST半導體公司. STM32F407ZET6數據手冊[EB/OL]. [2022-07-20]. https://pdf1.Alldatasheetcn.com/datasheet-pdf/view/556789/STMICROELECTRONICS/STM32F407ZET6.html.
猜你喜歡
農業與技術(2016年15期)2016-11-09 17:43:03
科技視界(2016年18期)2016-11-03 22:51:40
中國科技博覽(2016年22期)2016-11-01 16:58:26
軟件工程(2016年8期)2016-10-25 15:54:18
軟件工程(2016年8期)2016-10-25 15:52:53
中國科技博覽(2016年19期)2016-10-19 14:47:24
中國科技博覽(2016年19期)2016-10-19 13:40:37
中國科技博覽(2016年18期)2016-10-19 07:01:13
中國市場(2016年36期)2016-10-19 03:40:15
中國新通信(2016年16期)2016-10-18 10:44:22