汽車 DYC滑模控制器設(shè)計及系統(tǒng)穩(wěn)定性分析
2010-03-16 09:22:40丁能根余貴珍
北京航空航天大學(xué)學(xué)報 2010年11期
張 為 丁能根 王 健 余貴珍
(北京航空航天大學(xué) 交通科學(xué)與工程學(xué)院,北京 100191)
汽車 DYC滑模控制器設(shè)計及系統(tǒng)穩(wěn)定性分析
張 為 丁能根 王 健 余貴珍
(北京航空航天大學(xué) 交通科學(xué)與工程學(xué)院,北京 100191)
直接橫擺力矩控制(DYC,Direct Yaw Moment Control)可在極限工況下產(chǎn)生維持車輛穩(wěn)定行駛所需的附加橫擺力矩,從而提高汽車的主動安全性能.建立了能夠滿足汽車穩(wěn)定性控制測試要求的非線性汽車動力學(xué)模型,設(shè)計了用于汽車 DYC的滑模變結(jié)構(gòu)控制器(SMC,Sliding Mode Controller),并利用李氏函數(shù)證明了系統(tǒng)的穩(wěn)定性,最后在 Matlab/Simulink環(huán)境下對 SMC的穩(wěn)定性和控制效果進行了仿真測試.仿真結(jié)果表明了控制算法的有效性,并通過與 PID(Proportional-Integral-Derivative)算法控制效果的對比說明了 SMC具有更好的魯棒性,擁有更好的應(yīng)用潛力.
直接橫擺力矩控制;滑模變結(jié)構(gòu)控制器;穩(wěn)定性分析
在行車安全問題日益得到重視的現(xiàn)代社會,作為汽車主動安全技術(shù)的代表,汽車電子穩(wěn)定系統(tǒng)成為目前國際上的研究熱點.汽車穩(wěn)定性控制系統(tǒng)常見的名稱有 ESP(Electronic Stability Program),ESC(Electronic Stability Control),DSC(Dynamics Stability Control)等.鑒于汽車電子穩(wěn)定系統(tǒng)在提高汽車安全性方面的巨大優(yōu)勢,美國國家高速公路交通安全局 NHTSA于 2007年 4月出臺了全球第一部有關(guān) ESC的法規(guī)和標(biāo)準(zhǔn)——FMVSS126[1].按照該法規(guī)的規(guī)定,從 2011年 9月 1日起,在美國市場上銷售的所有載荷低于 4536kg的汽車必須裝備 ESC.
鑒于國外關(guān)鍵技術(shù)的保密以及 ESC在提高汽車安全性方面的巨大優(yōu)勢和潛力,我國有必要開展汽車電子穩(wěn)定系統(tǒng)基礎(chǔ)理論和控制方法的研究.到目前為止,清華大學(xué)、吉林大學(xué)等高校已開始該領(lǐng)域的研究和探索,并取得階段性的進展[2].本文基于滑模控制理論,采用等速趨近律完成了直接橫擺力矩控制(DYC,Direct Yaw Moment Control)滑模控制器的設(shè)計,并通過李雅普諾夫函數(shù)證明了控制系統(tǒng)的穩(wěn)定性,最后通過系統(tǒng)仿真在不同附著系數(shù)路面和駕駛員操作工況下驗證了該控制器的有效性.
1 DYC簡介
在 ESC的控制算法中,DYC是目前最為典型的控制方法之一.DYC以汽車運行時實際狀態(tài)變量值和期望狀態(tài)變量值的誤差作為控制量,利用差壓制動和/或與發(fā)動機通訊來改變驅(qū)動力矩的控制方法,產(chǎn)生維持汽車穩(wěn)定性所需的附加橫擺力偶矩,防止汽車在行駛過程中出現(xiàn)過多轉(zhuǎn)向或不足轉(zhuǎn)向等危險工況,保證行駛的安全性.圖 1為DYC系統(tǒng)結(jié)構(gòu)圖.
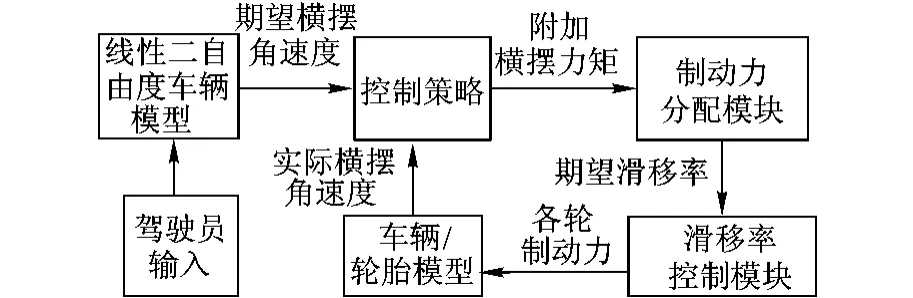
圖1 系統(tǒng)結(jié)構(gòu)圖
2 汽車動力學(xué)模型
2.1 整車動力學(xué)模型
汽車動力學(xué)模型是進行汽車 DYC系統(tǒng)控制方法研究、驗證控制策略及后續(xù)硬件在環(huán)仿真實驗的基礎(chǔ).在 DYC系統(tǒng)中的動力學(xué)模型必須同時具備足夠簡單以滿足實時性要求和復(fù)雜度適中以充分體現(xiàn)汽車運動真實性要求的特點.為此采用7自由度非線性汽車模型,具體公式可參見文獻[2].模型中還考慮了由于汽車縱向和側(cè)向加速度引起的載荷轉(zhuǎn)移,以更加真實地接近汽車的動力學(xué)特性.
2.2 輪胎模型
Dugoff模型假設(shè)輪胎接地印跡區(qū)內(nèi)垂直力均勻分布.與 Pacejka和與魔術(shù)公式輪胎模型相比,Dugoff模型的優(yōu)點在于它是根據(jù)力的平衡推導(dǎo)出的解析模型.更進一步,側(cè)向力和縱向力與輪胎/路面摩擦系數(shù)是有可用顯式表達的直接關(guān)系.因此,本文選用 Dugoff輪胎模型.下面給出模型的表達式并予以說明.
用 Kx表示輪胎縱向剛度,Cα表示輪胎側(cè)向剛度,α為側(cè)偏角.輪胎縱向力和側(cè)向力分別為

輪胎側(cè)偏角計算式為
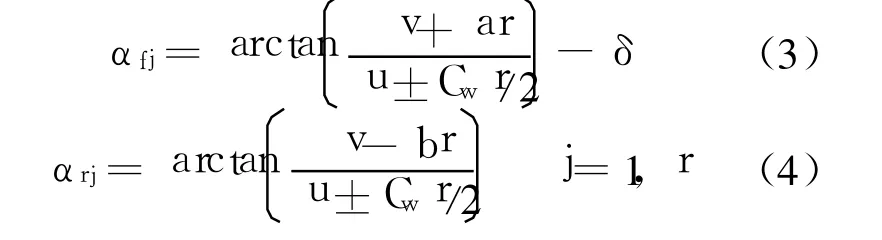
車輪滑移率計算式為
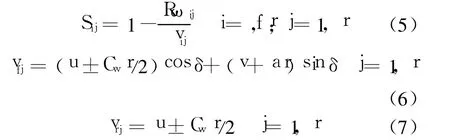
式中,s表示各輪滑移率;v表示各輪沿輪平面方向的速度;Fz為輪胎法向載荷;λ和摩擦系數(shù) μ有關(guān),它與函數(shù) f(λ)分別定義為
通過上述表達式可以計算出輪胎受到的縱向力和側(cè)向力.
3 控制器的設(shè)計
3.1 滑模控制器
滑模控制(SMC,Sliding Mode Control)與其他控制的區(qū)別在于系統(tǒng)“結(jié)構(gòu)”的不固定,其結(jié)構(gòu)可以在動態(tài)過程中,根據(jù)系統(tǒng)當(dāng)前的狀態(tài)(偏差及其各階導(dǎo)數(shù)等)有目標(biāo)地不斷變化,迫使系統(tǒng)按照預(yù)定“滑動模態(tài)”的狀態(tài)軌跡運動[3].由于滑動模態(tài)可以事先設(shè)定且與被控對象參數(shù)及擾動無關(guān),這就使得滑模變結(jié)構(gòu)控制具有快速響應(yīng)、對參數(shù)變化及擾動不靈敏、無需系統(tǒng)在線辨識、實現(xiàn)簡單等優(yōu)點.
滑模控制器的設(shè)計分為 4部分:控制系統(tǒng)所需的理想汽車模型和控制變量期望值的確定、滑模面的確定、滑模控制律的推導(dǎo)和系統(tǒng)穩(wěn)定性證明.
1)簡化的汽車和控制變量期望值
可利用線性二自由度汽車模型構(gòu)建控制系統(tǒng).該模型可定性描述輪胎在線性區(qū)間內(nèi)整車的轉(zhuǎn)向特性,表征了汽車操縱穩(wěn)定性與橫擺角速度r和質(zhì)心側(cè)偏角 β之間的關(guān)系.在二自由度模型上增加一個附加的橫擺力矩 Mu,可以得到
式中,Mu為附加的補償控制力矩輸入;a,b分別為汽車質(zhì)心至前軸和后軸的距離;L為軸距;I為汽車?yán)@ z軸的轉(zhuǎn)動慣量;δ為前輪轉(zhuǎn)向角;m為汽車質(zhì)量;u為汽車縱向速度;k1,k2分別為前后軸的側(cè)偏剛度.
令式(10)中的β·=0,r·=0可以得到,當(dāng)汽車進行穩(wěn)態(tài)轉(zhuǎn)向時的橫擺角速度即期望的橫擺角速度:

式中 K為穩(wěn)定性因數(shù).
DYC系統(tǒng)就是要使得汽車在轉(zhuǎn)向過程中實際的橫擺角速度能夠跟隨理想橫擺角速度值的變化趨勢.
2)滑模面的設(shè)計
為使汽車行駛過程的實際橫擺角速度跟蹤理想橫擺角速度值,保證汽車行駛過程中,輪胎始終處于線性特性的范圍,希望使得實際和理想橫擺角速度的跟蹤誤差 e=r-rd=0,為此定義滑模面為

當(dāng) s→0時 ,可得 e→0,e·→0,根據(jù)式 (9)~式(11)得
根據(jù)式(10)得
其中

因為 Mu未知,所以不能利用式(10)來計算r·,在此使用全程快速微分器,根據(jù)實際的橫擺角速度r直接得到橫擺角加速度估計值r^·,以r^·來替代r·,可以證明r^·在有限時間內(nèi)逼近r·[4].
3)滑模控制律
為抑制滑模控制的抖振現(xiàn)象,本文采用等速趨近律來設(shè)計滑模控制律[4],令

結(jié)合式(12)~式(14)得控制律為

對 M·u積分即可得到汽車 DYC維持汽車穩(wěn)定性行駛所需要的附加橫擺力矩 Mu.
4)穩(wěn)定性證明
定義 李雅普諾夫函數(shù)為

將控制律式(17)代入式(19)得
證畢
3.2 PID控制器
PID(Proportional-Integral-Derivative)控制是應(yīng)用最成熟的控制策略[5],它具有結(jié)構(gòu)簡單、魯棒性好、適應(yīng)性強等特點,被廣泛應(yīng)用于過程控制和運動控制中,尤其適用于可建立精確數(shù)學(xué)模型的確定性系統(tǒng),是實際應(yīng)用最為廣泛的控制技術(shù).但對于汽車這類非線性、時變系統(tǒng),難以建立精確的數(shù)學(xué)模型,為了得到滿意的控制效果,需要對各種不同的工況進行 PID控制參數(shù)的整定.
Simulink Response Optimization是一個在Simulink模型中調(diào)節(jié)設(shè)計參數(shù)的工具,它與 Simulink模型結(jié)合在一起,根據(jù)用戶定義的時域內(nèi)性能指標(biāo)約束,自動優(yōu)化系統(tǒng)參數(shù).該工具支持連續(xù)、離散以及多速率的模型,并可以通過蒙特卡羅仿真處理模型中的某些不確定量.本文中利用此工具模塊,針對測試的幾種工況對 PID的控制參數(shù)進行了優(yōu)化.經(jīng)過參數(shù)優(yōu)化的 PID控制器將與 SMC在相同工況下進行控制效果的對比試驗.
4 DYC控制仿真及其結(jié)果分析
利用設(shè)計的 PID控制器、SMC和建立的汽車動力學(xué)模型,進行了 DYC控制的仿真測試.測試工況分別為高附著系數(shù)(0.85)路面、高速(30m/s)移線操作和低附著(0.25)、中速(20m/s)移線操作.仿真測試結(jié)果分別如圖 2、圖 3所示.從圖2、圖 3的結(jié)果曲線上可以看出,無論是高附著還是低附著路面,或是高速、中速工況,未加控制的汽車橫擺角速度會迅速增大,汽車發(fā)生失穩(wěn),經(jīng)過參數(shù)優(yōu)化的 PID控制器和 SMC可較好地實現(xiàn)期望值的跟蹤,均有較好的控制效果.
由于PID控制器需要針對特定的工況進行反復(fù)的參數(shù)優(yōu)化整定,而 SMC一旦設(shè)計好之后,無論何種工況,只要其干擾因素未超過閾值,SMC均能產(chǎn)生合適的橫擺力矩使得實際的橫擺角速度跟隨期望值,并且不會受到路面附著系數(shù)和操作工況等因素的影響,具有很好的魯棒性.從圖 2、圖 3中也可看出,SMC響應(yīng)曲線的超調(diào)量要小于PID控制器,而且 SMC的控制曲線更平滑.
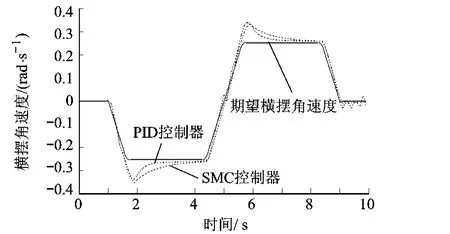
圖2 高附著系數(shù)(0.85),30m/s移線操作
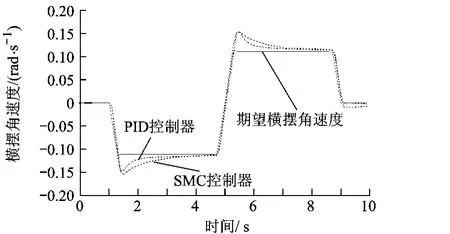
圖3 低附著系數(shù)(0.25),20m/s移線操作
4.1 SMC的相軌跡
圖4、圖 5為 SMC的相軌跡圖.圖中清晰地表明,無論汽車的運動從何點開始,本文所設(shè)計的SMC均可將其運動軌跡“吸引”到滑模面 s=0附近,并在有限時間到達并保持事先設(shè)定的滑模狀態(tài),即e→0,e·→0,從而實現(xiàn)系統(tǒng)的收斂.這說明了所設(shè)計的 SMC是有效的.
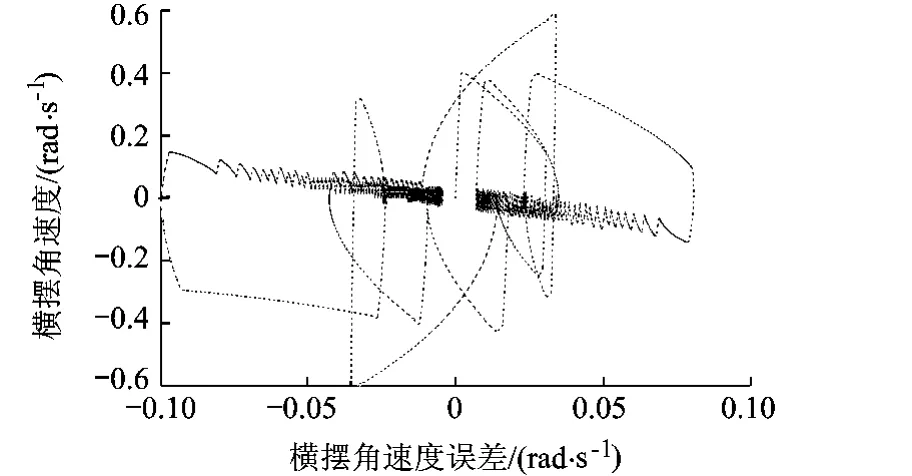
圖4 高附著系數(shù)(0.85),30m/s移線操作
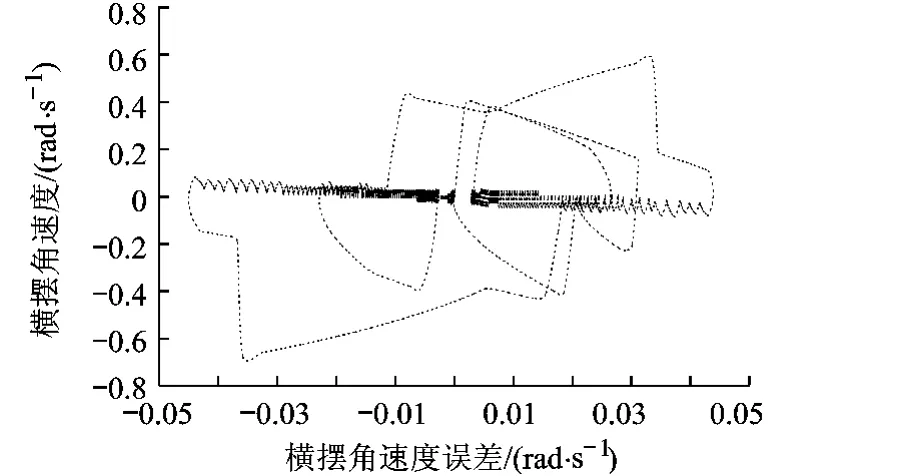
圖5 低附著系數(shù)(0.25),20m/s移線操作
4.2 相平面曲線
相平面法是一種在時域中求解二階微分方程的圖解法.它不僅能分析系統(tǒng)的穩(wěn)定性和自振蕩,而且能給出系統(tǒng)運動軌跡的清晰圖像,因此相平面法也被廣泛地應(yīng)用于汽車穩(wěn)定性的研究.相平面的選擇有 2種:①質(zhì)心側(cè)偏角和橫擺角速度的穩(wěn)定域;②質(zhì)心側(cè)偏角和質(zhì)心側(cè)偏角速度的穩(wěn)定域.為了能夠更加清晰地對比 PID控制器和 SMC的控制效果,本文將 PID和 SMC 2種控制器的 2種相平面結(jié)果均做了對比試驗.圖 6、圖 7為質(zhì)心側(cè)偏角和質(zhì)心側(cè)偏角速度的相平面圖,圖 8、圖 9為質(zhì)心側(cè)偏角和橫擺角速度的相平面圖.
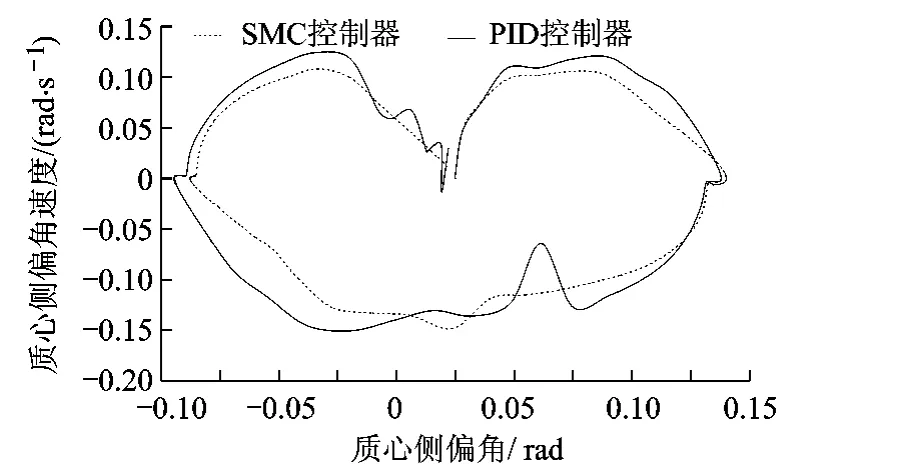
圖6 相平面圖(u=30m/s,μ=0.85)
圖6~圖 9中的對比曲線可以得出如下結(jié)論,PID控制器與 SMC均可以使汽車在穩(wěn)定區(qū)域內(nèi)運動,獲得了較好的穩(wěn)定性控制效果;SMC的相軌跡較 PID控制器的要平滑,說明 SMC的效果要比 PID控制器的控制過程更平穩(wěn);從圖中還可以看出無論何種工況下 SMC的超調(diào)量要小于PID.

圖7 低附著系數(shù)(0.25),20m/s移線操作

圖8 高附著系數(shù)(0.85),30m/s移線操作
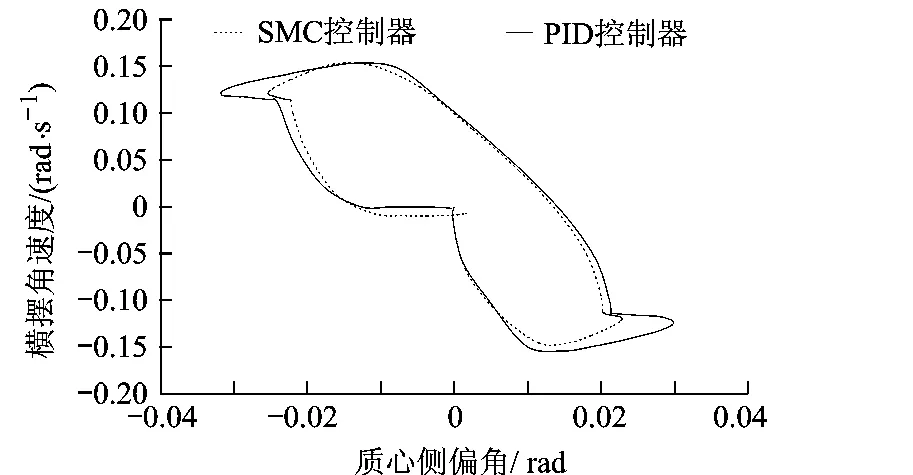
圖9 低附著系數(shù)(0.25),20m/s移線操作
5 結(jié) 論
本文在建立了 7自由度汽車動力學(xué)模型的基礎(chǔ)上,針對汽車動力學(xué)穩(wěn)定性試驗的典型工況,對PID,SMC的控制效果進行對比試驗,并利用相平面對結(jié)果進行了分析.主要結(jié)論如下:
1)本文在研究汽車動力學(xué)的基礎(chǔ)上,設(shè)計的滑模控制器可以很好地兼顧滑模的魯棒性優(yōu)勢并最大程度上減小了顫振.并通過李氏函數(shù)證明其穩(wěn)定性,仿真測試結(jié)果也表明在控制過程中,系統(tǒng)的運動點均在滑模面 s=0附近運動.
2)實驗曲線表明,經(jīng)過參數(shù)整定的 PID控制器和 SMC均可以明顯改善汽車在高速轉(zhuǎn)向時的行駛穩(wěn)定性,使得汽車的實際橫擺角速度很好地跟隨橫擺角速度期望值,并可在低附著系數(shù)路面上最大限度實現(xiàn)駕駛員的駕駛意圖,明顯改善了汽車的操縱穩(wěn)定性.進一步可以看出,SMC的跟蹤特性、對路面附著系數(shù)變化擾動的魯棒性要優(yōu)于 PID控制器.
3)從汽車動力學(xué)穩(wěn)定性測試常用的兩種相平面曲線結(jié)果分析表明,SMC的超調(diào)量、平穩(wěn)性要優(yōu)于 PID控制器,從另一個層面上體現(xiàn)了 SMC作為 DYC控制算法的優(yōu)勢.
References)
[1]黃炳華,陳禎福.ESC的最新動向和發(fā)展趨勢[J].汽車工程,2008,30(1):1-9 Huang Binghua,Chen Zhenfu.The current situation and development trends of ESC[J].Automotive Engineering,2008,30(1):1-9(in Chinese)
[2]李亮,宋健,祁雪樂.汽車動力學(xué)穩(wěn)定性控制系統(tǒng)研究現(xiàn)狀及發(fā)展趨勢[J].農(nóng)業(yè)機械學(xué)報,2006,37(2):141-144 Li Liang,Song Jian,Qi Xuele,et al.Investigation and development of vehicle dynamics stability control system[J].Transactions of the Chinese Society for Agricultural Machinery,2006,37(2):141-144(in Chinese)
[3]劉金琨.滑模變結(jié)構(gòu)控制 Matlab仿真[M].北京:清華大學(xué)出版社,2005:4-18 Liu Jinkun.Matlab simulation for sliding mode control[M].Beijing:Tsinghua University Press,2005:4-18(in Chinese)
[4]Wang Xinhua,Chen Zengqiang,Yang Geng.Finite time convergent differentiator based on singular perturbation technique[J].IEEE Transactions on Automatic Control,2007,52(9):1731-1737
[5]楊智,朱海鋒,黃以華.PID控制器設(shè)計與參數(shù)整定方法綜述[J].化工自動化及儀表,2005,32(5):1-7 Yang Zhi,Zhu Haifeng,Huang Y ihua.Recent studiesofPID design and parameter tuning method[J].Control and Instruments in Chem ical Industry,2005,32(5):1-7(in Chinese)
(編 輯 :張 嶸)
Vehicular DYC via SMC and system stability analysis
Zhang Wei Ding Nenggen Wang Jian Yu Guizhen
(School of Transportation Science and Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
Directyaw moment control(DYC)can generate the additional yaw-moment needed to maintain vehicle stability in the limit conditions so to improve the active safety of a vehicle's hand ling.A nonlinear vehicle dynamic model which meets the requirements of vehicle stability control experiments was established,and a sliding mode controller(SMC)was designed.The stability of the SMC controller was proved with Lyapunov function.At last the stability and control effectof the SMC was verified by simulations in Matlab/Simulink.The simulation results prove the effectiveness of the control algorithm and suggeste that the robustness of SMC is better than that of proportional-integral-derivative(PID)control algorithm,which proves SMC better application potential.
direct yaw moment control;sliding mode controller;stability analysis
U 461.6
A
1001-5965(2010)11-1353-05
2009-06-16
國家自然科學(xué)基金資助項目(50908008);國家“863”計劃資助項目 (2009AA 11Z216)
張 為(1981-),男,陜西三原人,博士生,zhw@ae.buaa.edu.cn.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37