舵槳聯(lián)合操縱微小型潛器運動建模與仿真*
2010-04-12 08:02:46蘇玉民郭冰潔
關(guān)鍵詞:深度
王 波 蘇玉民 郭冰潔 梁 霄
(哈爾濱工程大學(xué)船舶工程學(xué)院 哈爾濱 150001)
0 引 言
隨著海洋研究與開發(fā)的不斷進展,自主式水下潛器(AUV)在民用領(lǐng)域、軍事領(lǐng)域和科學(xué)研究等方面的應(yīng)用日益引起廣泛的重視.微小型水下潛器因其具有體積小,隱蔽性好,造價低,能耗小,機動靈活,可批量生產(chǎn),搭載靈活等優(yōu)勢,從而成為AUV發(fā)展的一個重要方向[1].本文研究的對象就是某型舵槳聯(lián)合操縱的微小型水下潛器.AUV空間運動具有耦合性和非線性,建立適合AUV運動數(shù)學(xué)模型是研究AUV操縱性能和進行控制系統(tǒng)設(shè)計的基礎(chǔ).同時,采用理論或試驗方法對數(shù)學(xué)模型中需要的各項力進行分析求解對AUV進行運動仿真模擬對預(yù)報AUV的操縱性能,選取控制參數(shù)和檢驗控制效果有重要意義.
基于動量定理和動量矩定理推導(dǎo)了AUV的動力學(xué)方程,并結(jié)合運動學(xué)方程得到AUV空間運動的六自由度數(shù)學(xué)模型,并采用了模塊化的矩陣表達方式,使模型更加簡潔明了.針對研究對象,采用試驗和理論計算方法獲取微小型潛器的流體動力參數(shù),采用S面控制方法[2]對速度控制、艏向控制和深度控制進行仿真模擬,對研究微小型潛器的操縱性能和運動控制提供有意義的參考.
1 微小型潛器運動的非線性數(shù)學(xué)模型
1.1 坐標系選取及運動參數(shù)定義
本文所研究的微小型潛器總長1.5m,重量37kg,單槳推進,采用鋰電池作為能源,尾部為一對水平舵和一對垂直舵,4個舵完全相同,設(shè)計巡航速度約2kn.
根據(jù)國際水池會議(ITTC)推薦的和造船與輪機工程學(xué)會(SNAME)術(shù)語公報的體系,建立如下2種坐標系:固定坐標系E-ξηζ(又稱慣性坐標系)和運動坐標系o-xyz(又稱隨體坐標系).如圖1所示[3]:
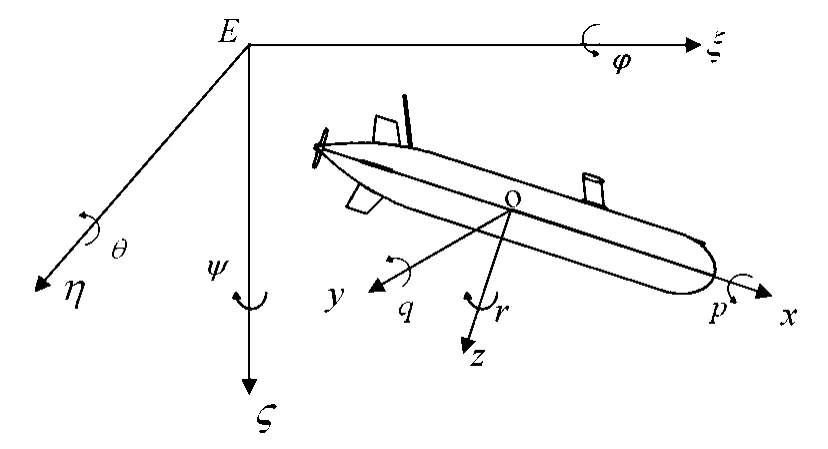
圖1 坐標系示意圖
記廣義方位參數(shù)為R,廣義速度參數(shù)為V,廣義力參數(shù)為G,則微小型潛水器的運動參數(shù)包括:
1)位置和姿態(tài)(慣性坐標系下) R=[rT,ΛT]T,r=[ξ,η,ζ]T,Λ=[φθψ]T.
2)速度和角速度(運動坐標系下) V=[UT,ΩT]T,U=[u,v,w]T,Ω=[p,q,r]T.
3)力和力矩參數(shù)(運動坐標系下):G=[FT,MT]T,F(xiàn)=[X,Y,Z]T,M=[K,M,N]T.
1.2 運動學(xué)方程
AUV在慣性坐標系下的空間位置和姿態(tài)與其在運動坐標系下的速度和角速度和速度的動態(tài)關(guān)系可以由運動學(xué)方程來描述
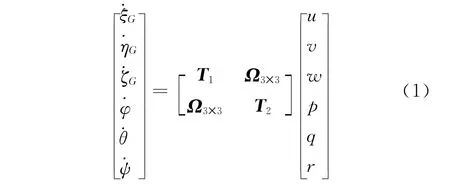
式中:T1,T2為3×3的坐標轉(zhuǎn)換矩陣.

1.3 動力學(xué)方程
根據(jù)動量定理和動量矩定理,可得到潛器的平移動力學(xué)方程和旋轉(zhuǎn)動力學(xué)方程[4],分別為
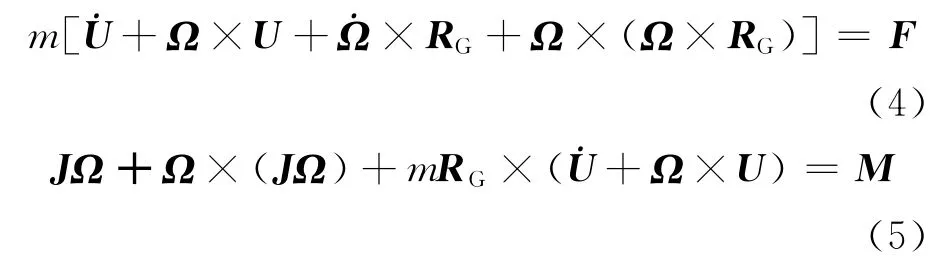
式中:RG=(xG,yG,zG)為潛水器重心在運動坐標系下的位置向量;J為潛水器在運動坐標系中的慣量矩陣.J的矩陣形式為
將式(4)、(5)合并后寫為如下形式

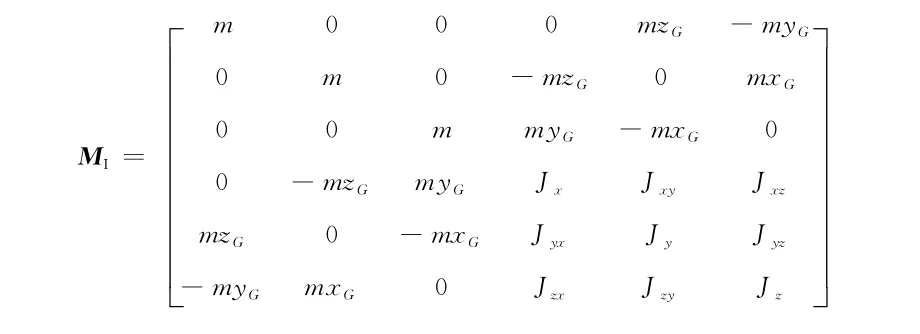
式中:MI為廣義質(zhì)量矩陣;C(V)為潛器自身的科氏力和向心力矩陣.MI和C(V)的矩陣表達式為

動力學(xué)方程右端的廣義力G是指潛器所受的外力,包括靜力(重力和浮力),艇體流體動力(包括附加質(zhì)量部分和粘性水動力部分),可控的流體動力(包括舵作用力和螺旋槳作用力).
潛器所受的靜力Gp表示為
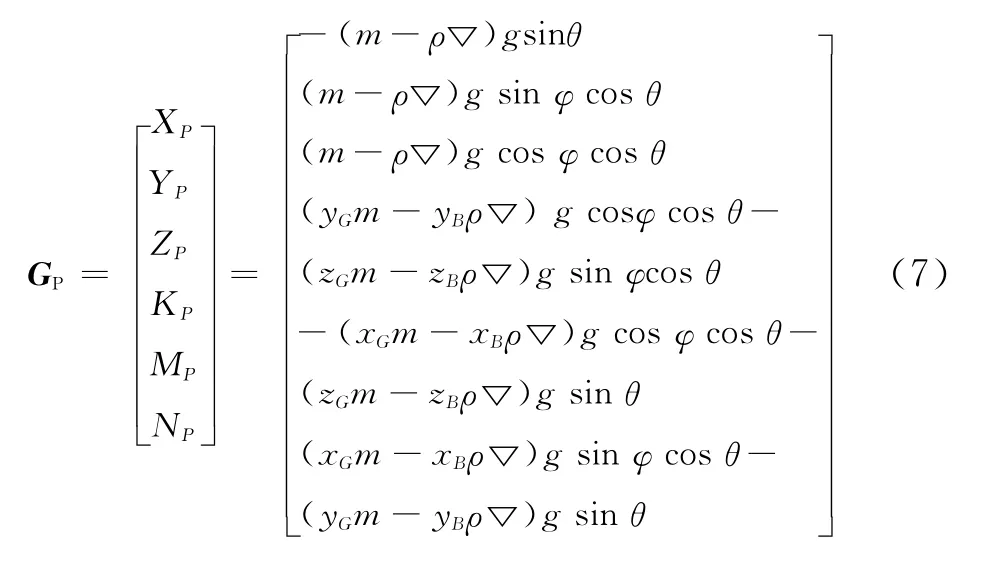
式中:(xB,yB,zB)為潛器浮心坐標位置;m 為潛器質(zhì)量;▽為潛器的排水體積;ρ為流體密度.
將與附加質(zhì)量相關(guān)的慣性類水動力記為GA,表達為如下形式

式中:MA為廣義的附加質(zhì)量矩陣.
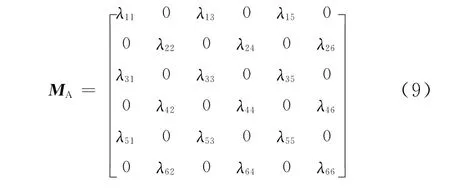
由于潛器一般關(guān)于XOZ面對稱,所以附加質(zhì)量矩陣可簡化為如下形式
根據(jù)所研究潛器的外形特征,將艇體的粘性類水動力記為GV,寫成以下形式
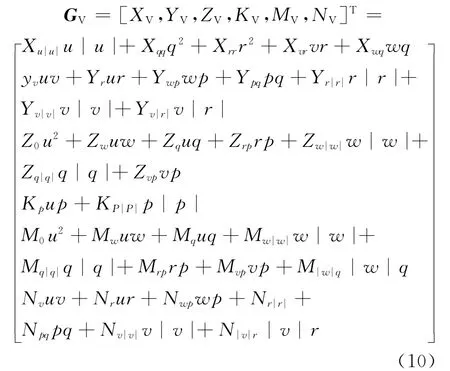
式中:Xu|u|、Yr、Yr|r|、Mw|w|等都是一階或二階的水動力系數(shù).
對于舵產(chǎn)生的流體動力,在舵角未達到升力的失速角的情況下,將舵的流體動力記為GR,則
式中:δr為垂直舵舵角;δs為水平舵舵角;Xδδr,Xδsδs,Yδr和Zδs為舵角的力和力矩系數(shù);ls和lr分別為水平舵和垂直舵對應(yīng)于運動坐標系原點的力臂的大小.
將螺旋槳產(chǎn)生的流體動力表示為Gs,對于單槳推進,則

式中:n為螺旋槳轉(zhuǎn)速;D為螺旋槳直徑;kt為推力系數(shù);kq為轉(zhuǎn)矩系數(shù).
基于以上的分析,可將動力學(xué)方程式(6)表達為更詳細的式(13),此方程也適用于一般的水下航行器.

對于動力學(xué)方程中各項力的求取,本文通過3維面元法計算微小型潛水器艇體的附加質(zhì)量[5](艇體表面網(wǎng)格劃分2 057個,如圖2所示);粘性類水動力通過在循環(huán)水槽利用平面運動機構(gòu)進行的模型試驗以及推算獲取;舵和螺旋槳的流體動力也由試驗得到.
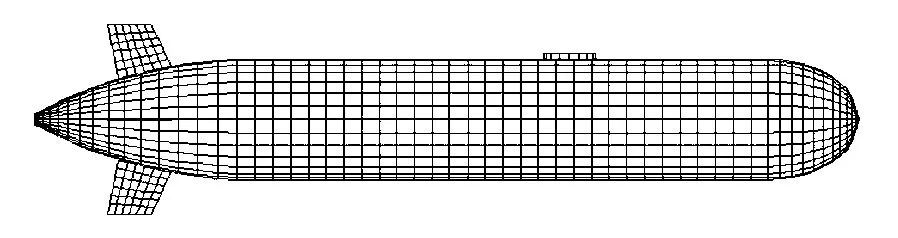
圖2 潛水器表面網(wǎng)格劃分
2 控制方法及推力分配
2.1 控制方法[6-7]
本文選取S面控制方法控制潛水器的運動來進行仿真模擬,S面控制是將模糊控制的思想與PID控制的結(jié)構(gòu)相結(jié)合,既簡化了控制器的設(shè)計又保證了控制效果,并且在湖試和海試中得到了驗證.S面控制的控制模型為

式中:ei和為第i自由度控制的輸入信息(偏差和偏差變化率,通過歸一化處理);ui為第i自由度的控制輸出;ki1和ki2分別為對應(yīng)第i自由度偏差和偏差變化率的控制參數(shù);fi為該自由度上所需力的大小;Ki為該自由度上執(zhí)行機構(gòu)所能提供的最大力或力矩.對于潛器水下受到的一些未知擾動,可以考慮成一段時間內(nèi)的固定干擾力,這樣就可以通過調(diào)整S面的偏移來達到消除固定偏差的目的,Δui即為通過自適應(yīng)方式得到的固定干擾力的大小(歸一化).
另外,由于所研究的微小型潛器只有一個槳和兩對舵,執(zhí)行機構(gòu)較少,因此運動是欠自由度的,不能實現(xiàn)水平橫移、垂直橫移和橫滾運動,潛器的橫滾由其自身的恢復(fù)力矩恢復(fù)穩(wěn)定.因此后續(xù)運動仿真給出定速、定向、定深3種運動的控制結(jié)果.
需要特別說明的是:由于此微小型潛器垂向未布置推進器,深度控制通過一對水平舵來實現(xiàn),所以本文將深度控制通過一定運算轉(zhuǎn)化為縱傾控制,依靠控制潛器縱傾的方法來實現(xiàn)定深航行.
將深度變化Δz表達為縱傾角θ和潛器縱向速度u的函數(shù)

取反可得到潛器的目標縱傾角θd

2.2 推力分配
微小型潛器執(zhí)行機構(gòu)少,推力分配較簡單,只需分配x軸方向的推力Tx和繞y軸的力矩My和繞z軸的力矩Mz,關(guān)系如下
式中:L為推力配置的常量矩陣,寫為
其他符號定義可參考式(11)和式(12).
3 運動仿真及分析
基于以上潛器的數(shù)學(xué)模型和控制策略,用VC在計算機上建立了仿真平臺,同時結(jié)合潛器的設(shè)計航速,給出微小型潛器從初始狀態(tài)(初始速度、角速度、初始位置和姿態(tài)都為0)到縱向速度u穩(wěn)定在1m/s的定速控制仿真曲線,在速度u=1m/s時進行艏向控制,使艏向偏轉(zhuǎn)30°,45°和90°的仿真曲線和進行深度控制時定深3m的仿真曲線,同時給出了水池試驗的一些數(shù)據(jù)進行對比,驗證仿真模型的正確性[8].
圖3給出速度控制曲線.從圖中可以看出,微小型潛器速度在17s左右趨于穩(wěn)定,達到1m/s,控制上升時間較短,基本沒有超調(diào)和穩(wěn)態(tài)誤差.
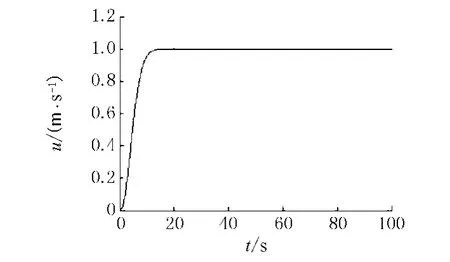
圖3 定速控制的速度變化曲線
圖4給出微小型潛器艏向控制的仿真曲線,從圖中可以看出,在3個偏轉(zhuǎn)角度下,微小型潛器都能較快的進入穩(wěn)定,基本無超調(diào),顯示了潛器良好的水平面回轉(zhuǎn)性能,同時艏向角改變越大,相應(yīng)的搖艏角速度的變化也越大.圖5給出了水池試驗中艏向控制曲線,試驗時初始艏向角約-130°,目標艏向為-110°,從圖中也可以看出,實際艏向控制效果是令人滿意的.另外由于水池寬度所限,無法實現(xiàn)與仿真試驗中3個偏轉(zhuǎn)角度下的曲線對比,但是從圖5的曲線也可以看出控制方法的可行性以及仿真的可信性.
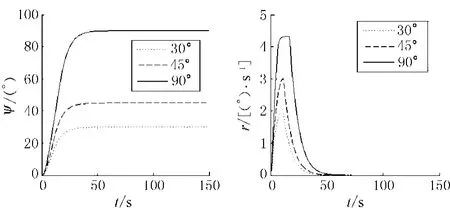
圖4 定向控制艏向角和搖艏角速度變化曲線
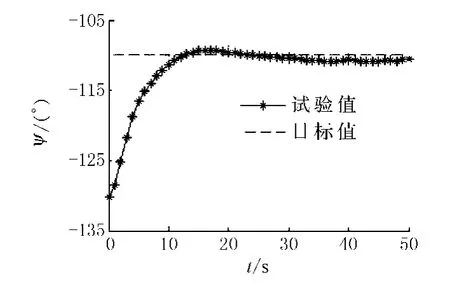
圖5 水池試驗的艏向控制曲線
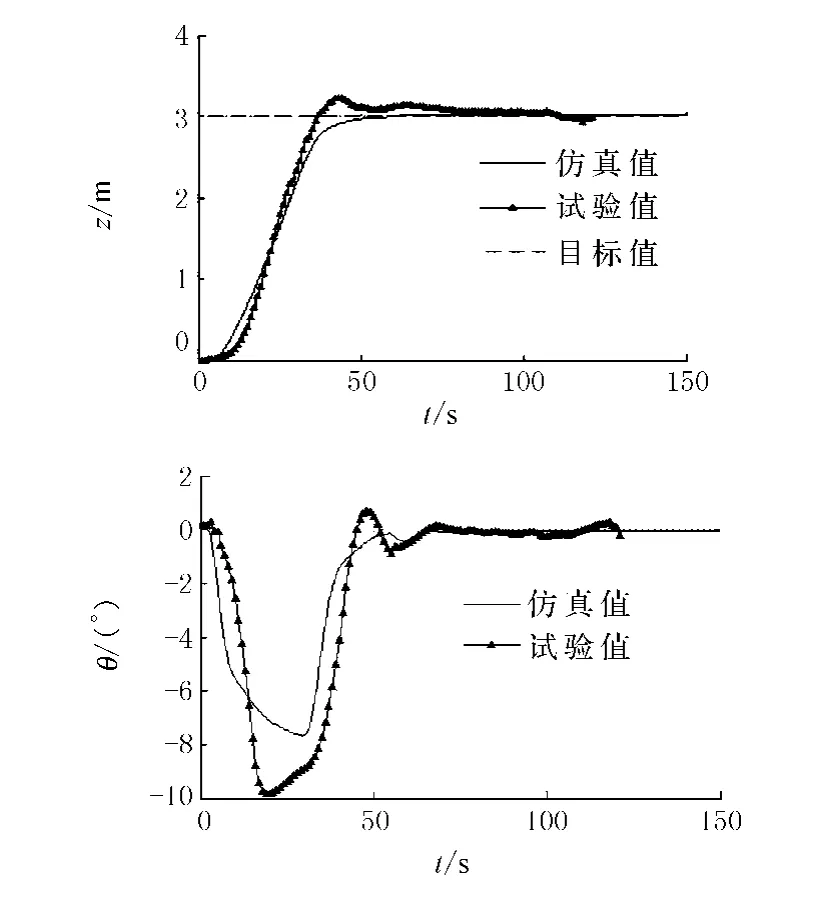
圖6 深控制深度和縱傾角變化曲線
圖6給出了采用縱傾控制調(diào)節(jié)深度時的深度隨時間的變化曲線和相應(yīng)的縱傾角變化曲線,同時給出了仿真結(jié)果與試驗值的對比.從圖中可以看出潛器在縱傾控制下深度變化連續(xù)平穩(wěn),穩(wěn)態(tài)誤差較小,在深度偏差較大時,縱傾角 逐漸增大到最大值,隨著偏差減小,也隨之減小,最終穩(wěn)定在0°左右.從試驗結(jié)果與仿真的對比來看,兩者之間存在一定的偏差,試驗值深度控制有一定的超調(diào),縱傾角相對于仿真值來說偏大,最大相差約2°,這是因為試驗時微小型潛器尾部帶有一根光纜,對潛器的下潛會產(chǎn)生一定的影響,另外還有舵翼實際安裝位置的偏差產(chǎn)生的影響,重心位置偏差引起的回復(fù)力矩與仿真時的不同所產(chǎn)生的影響等.但總的來說,結(jié)果還是比較令人滿意的,試驗值和仿真結(jié)果吻合的還是較好的,最終的深度能夠穩(wěn)定在目標值附近,這說明所建立的運動模型和仿真結(jié)果是真實可信的.也證明了本文采用的依靠調(diào)節(jié)縱傾來控制深度的方法是可行的.
4 結(jié) 束 語
本文建立了微小型潛器空間運動的非線性數(shù)學(xué)模型,分析了動力學(xué)方程中各項力并分別表達為矩陣形式.在此基礎(chǔ)上,采用S面控制方法對潛器的定速、定向和定深控制進行了數(shù)值仿真.仿真結(jié)果較為真實的反映了在舵槳聯(lián)合操縱下潛器的運動特性和操縱性能,與試驗結(jié)果的對比也驗證了仿真的合理性和正確性.同時本文建立的動力學(xué)模型也適用于一般的水下航行器.另外由于微小型潛器體積較小,對外界干擾抵抗力低,所以今后需要進一步研究復(fù)雜海洋環(huán)境對它的影響,從而更好的模擬潛器在海洋環(huán)境中實際運動.
[1]蘇玉民,萬 磊,李 曄,等.舵槳聯(lián)合操縱水下機器人的開發(fā)[J].機器人,2007,29(2):151-154.
[2]劉學(xué)敏,徐玉如.水下機器人運動的S面控制方法[J].海洋工程,2001,19(3):91-84.
[3]Li Ye,Liu Jiancheng,Shen Mingxue.Dynamics model of underwater robot motion control in 6degrees of freedom [J].Journal of Harbin Institute of Technology,2005,12(4):456-459.
[4]李殿璞.船舶運動與建模[M].哈爾濱:哈爾濱工程大學(xué)出版社,1999.
[5]戴遺山.艦船在波浪中運動的頻域與時域勢流理論[M].北京:國防工業(yè)出版社,1998.
[6]孔祥軍,鄒早建,牟軍敏.一種操縱性水動力導(dǎo)數(shù)的實用估算方法[J].武漢理工大學(xué)學(xué)報:交通科學(xué)與工程版,2004,28(1):30-32.
[7]Song Feijun,An P E,F(xiàn)olleco A.Modeling and simulation of autonomous underwater vehicles:design and implementation[J].IEEE Journal of Oceanic Engineering,2003,28(2):283-296.
[8]杜曉旭,潘 光.遠程AUV微速操縱性仿真研究[J].系統(tǒng)仿真學(xué)報,2007,19(3):470-473.
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2022年6期)2022-06-05 06:50:50
快樂學(xué)習(xí)報·教育周刊(2022年16期)2022-05-01 21:25:05
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
藝術(shù)品鑒證.中國藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國藝術(shù)金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設(shè)與管理(2015年15期)2015-03-20 15:18:57