基于PEM的輔助動力裝置系統(tǒng)辨識與仿真
2010-07-14 01:53:04王道波
燃氣渦輪試驗與研究 2010年3期
江 群,王道波,李 猛
(南京航空航天大學 自動化學院,江蘇 南京210016)
1 引言
輔助動力裝置(APU)是加裝一套或幾套獨立于主發(fā)動機的動力系統(tǒng),是一種能輸出增壓氣源和軸功率的小型發(fā)動機[1]。其主要作用是用來起動主發(fā)動機,驅(qū)動發(fā)電機和液壓泵為飛機提供備份電源及液壓源,同時還可以向座艙空調(diào)系統(tǒng)提供氣源。輔助動力裝置與普通發(fā)動機有很大的不同,其啟動過程異常復雜,難度很大,目前國內(nèi)尚無起動過程的準確模型。另外,APU的工作特性決定了要求其快速到達額定狀態(tài),且在功率提取時保證轉(zhuǎn)速在小范圍變化,即要求其絕大多數(shù)工作狀態(tài)在等速狀態(tài)。為了研究APU的性能和控制規(guī)律,必須建立APU的模型。發(fā)動機模型主要分為部件級模型和“小偏差”模型[2]:其中部件級模型主要是通過部件特性建立其數(shù)學模型,雖然精確但要詳細了解部件特性且不具備實時性;“小偏差”數(shù)學模型不需要了解其詳細的部件特性,根據(jù)工程試驗數(shù)據(jù)就可以建立實時簡化的數(shù)學模型,該簡化模型能模擬APU穩(wěn)態(tài)、動態(tài)及起動過程。本文根據(jù)某型APU的試驗數(shù)據(jù),采用預測誤差法(PEM)來建立其動態(tài)模型。這種方法的基本思想與最小二乘法的完全不同,它只需要確定一個預報誤差準則函數(shù),并利用預報誤差信息來確定模型參數(shù)。相對于極大似然參數(shù)估計法,PEM具有的優(yōu)點是不要求已知數(shù)據(jù)的概率分布式,所以其使用范圍更加廣泛[3]。本文在介紹渦輪動力裝置的工作原理基礎(chǔ)上,提出了電子仿真試驗器的設(shè)計原理和實現(xiàn)方法,最后將該試驗器用于某型渦輪動力裝置的閉環(huán)控制并對其仿真結(jié)果進行分析。
2 系統(tǒng)辨識原理及預測誤差法
所謂系統(tǒng)辨識,就是通過研究對象的輸入信號作用下的輸出響應(yīng),對輸入、輸出數(shù)據(jù)進行處理和計算,估計出對象的數(shù)學模型[4]。辨識由數(shù)據(jù)、模型和準則這三個要素組成,利用數(shù)據(jù),通過準則優(yōu)化在模型類中找出最佳模型。系統(tǒng)辨識的內(nèi)容包括四個方面:①辨識目的;②模型結(jié)構(gòu)辨識;③模型參數(shù)辨識;④驗證模型。本文采用PEM對模型參數(shù)進行辨識。
描述動態(tài)系統(tǒng)的模型的一般形式為:

式中:y(k)表示在k時刻系統(tǒng)輸出的觀測值;Y(k-1)表示k-1時刻以及之前的輸出觀測數(shù)據(jù)的集合表示k時刻以及之前的控制變量的集合為系統(tǒng)的參數(shù)向量;v(k)是具有零均值和均方差陣Σ的信息序列。
采用PEM估計參數(shù)θ,可以根據(jù)給定的數(shù)據(jù)構(gòu)造如式(2)的預測誤差模型:

根據(jù)參數(shù)估計的PEM的原理,采用式(3)或式(4)作為極小預測誤差準則來獲得系統(tǒng)輸出y(k)的最優(yōu)預報。

采用以上方法對模型參數(shù)進行辨識,首先要選擇合理的采集數(shù)據(jù),并對數(shù)據(jù)進行跳點剔除、平滑處理;其次是選擇合適的模型階數(shù),利用PEM進行模型參數(shù)辨識;最后對所辨識的模型進行仿真驗證。
3 模型參數(shù)辨識及仿真結(jié)果分析
本文研究的對象某型輔助動力裝置,雖然是一個復雜的非線性系統(tǒng),但是其尾噴管不可調(diào),是非加力、單軸小型發(fā)動機,而且如果發(fā)動機處在“小偏離”狀態(tài),即輸入量在很小的范圍內(nèi)變化,則發(fā)動機的工作狀態(tài)在某一穩(wěn)態(tài)附近,在該穩(wěn)態(tài)點對發(fā)動機的非線性方程進行Taylor公式展開,忽略高次項的影響,這時發(fā)動機模型可表示為線性時不變模型。研究該型APU的“小偏離”模型,主要是以APU的轉(zhuǎn)速N(%)作為被控量,選擇供燃油量wf作為控制量。在地面臺架試車試驗中,采集燃油流量作為輸入量,轉(zhuǎn)速百分比作為輸出。試驗過程中,采集時間間隔為0.25s。
3.1 數(shù)據(jù)預處理
由于發(fā)動機導葉角以及尾噴管面積不可調(diào),理論上來說,穩(wěn)態(tài)時各狀態(tài)參數(shù)如渦輪轉(zhuǎn)速、空氣流量等都與燃油流量一一對應(yīng)。但在實際試驗過程中,受試驗發(fā)動機、試驗環(huán)境和設(shè)備等諸多因素的影響,試驗所得穩(wěn)態(tài)數(shù)據(jù)經(jīng)換算后存在明顯的偏離總體變化趨勢的個別突變穩(wěn)態(tài)點(即跳點)。如果對這些跳點不加以去除,勢必會影響辨識的結(jié)果。本文采取簡單的低階多項式滑動擬合法來判斷和剔除跳點[5],某燃油流量跳點剔除前后的數(shù)據(jù)對比如圖1所示。比較圖1中的曲線可以發(fā)現(xiàn),低階多項式滑動擬合法能有效去除采集過程中的跳點,使數(shù)據(jù)可靠性變高。
通常情況下,在跳點剔除處理后,試驗數(shù)據(jù)仍然存在著各種誤差及較強的噪聲干擾。為保持合理的信噪比,還需對采集的輸入、輸出數(shù)據(jù)進行平滑處理,以消除實測數(shù)據(jù)中各種噪聲和系統(tǒng)誤差,提高辨識精度。本文主要利用MATLAB系統(tǒng)辨識工具箱中idfilt函數(shù)的Butterworth濾波器對數(shù)據(jù)進行濾波,去除噪聲分量,再利用idresamo函數(shù)對輸入、輸出數(shù)據(jù)進行重新采樣來插值或刪減數(shù)據(jù)[5,6]。經(jīng)上述方法平滑處理前后的部分曲線如圖2、圖3所示。從圖中可以看出,原來試驗采樣時間為0.25 s,誤差較大,經(jīng)處理后,數(shù)據(jù)明顯平滑。本節(jié)只給出某種條件下的數(shù)據(jù)預處理效果圖,對于其它環(huán)境條件下的數(shù)據(jù),可采用相同方法進行處理。

圖1 燃油流量跳點處理前后比較曲線Fig.1 Before and after processing curves of sudden change points in the fuel flow

圖2 燃油流量平滑處理曲線比較Fig.2 Comparison of fuel flow smoothing curves

圖3 轉(zhuǎn)速百分比平滑處理曲線比較Fig.3 Comparison of speed percentage smoothing curves
3.2 模型結(jié)構(gòu)和模型參數(shù)辨識
采集數(shù)據(jù)預處理后進行參數(shù)辨識,在辨識參數(shù)之前應(yīng)確定模型的階數(shù)。由于某型輔助動力裝置為非加力且尾噴管不可調(diào),因而在某一穩(wěn)態(tài)點附近可簡化為線性時不變系統(tǒng)。采用一階系統(tǒng)滿足不了精度的要求,而采用三階系統(tǒng)會使整個系統(tǒng)變得復雜。仿真結(jié)果表明,二階系統(tǒng)足以滿足APU的精度要求,所以模型階次選為二階,設(shè)定待辨識參數(shù)為θ=本文選用該型APU以進入閉環(huán)控制階段的85%~96%額定轉(zhuǎn)速段所測數(shù)據(jù)進行數(shù)學模型辨識,運用上述方法辨識所得的參數(shù)估計值為:a1=-1.486,a2=0.506 2,b1=29.42,b2=-9.496。
系統(tǒng)的傳遞函數(shù)為:

辨識所得曲線如圖4所示,擬合度為96.06%。從上述辨識結(jié)果可見,采用該方法擬合的效果很好,能滿足輔助源動力裝置轉(zhuǎn)速的動態(tài)特性。對于輔助動力裝置其它不同階段的數(shù)學模型,可采用相同方法對采集的數(shù)據(jù)進行辨識分析,得到各個數(shù)據(jù)段的模型參數(shù)。

圖4 二階模型辨識結(jié)果Fig.4 Identification result curves of second-order model
3.3 驗證模型
模型參數(shù)辨識后,還需要對所辨識模型的通用性和正確性進行驗證。本文選用另一組燃油流量輸入數(shù)據(jù)驗證模型。將試驗數(shù)據(jù)的輸入量作為辨識模型的輸入量,經(jīng)模型計算,得到模型輸出量;再將模型輸出量與試驗輸出量進行比較。其模型驗證曲線如圖5所示,可以看出,模型輸出數(shù)據(jù)與試驗數(shù)據(jù)吻合度很高,達到了模型建立的精度要求,可以將該模型用于以后的仿真研究。
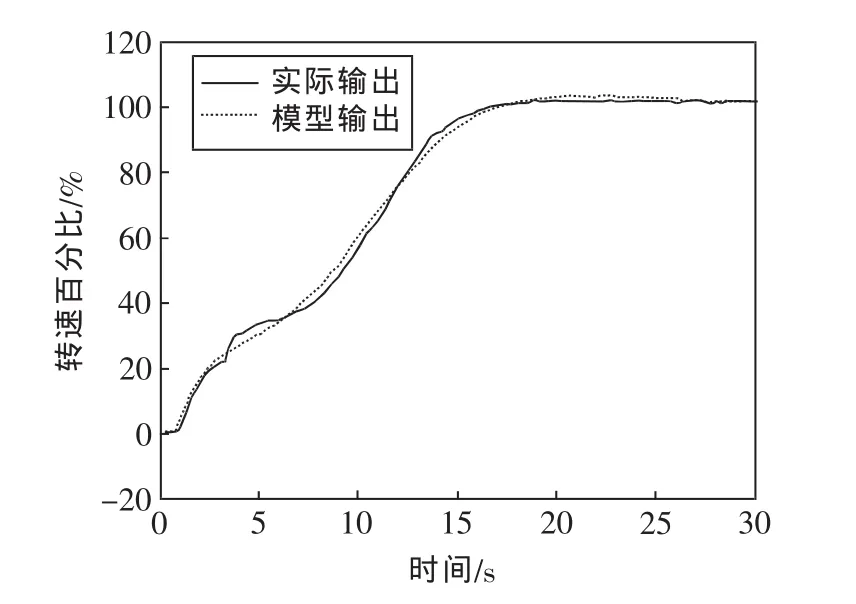
圖5 模型驗證曲線Fig.5 Model validation curves
4 結(jié)束語
本文通過預測誤差法辨識某型輔助動力裝置的簡化模型,大大減少了計算量,簡化了建模過程。仿真結(jié)果表明,所建模型的輸入和輸出與實際試驗結(jié)果吻合度很高,本文所用辨識方法是可靠、有效的,因而可以以該模型為基礎(chǔ)對某型輔助動力裝置的控制系統(tǒng)進行設(shè)計。不過本文辨識的輔助動力裝置的數(shù)學模型是根據(jù)地面臺架試車數(shù)據(jù)辨識的,因此本文辨識的數(shù)學模型僅能描述地面工作狀況,為了使模型能適應(yīng)大偏差的工作范圍,還需要在各種工作負載和飛行高度下進行辨識驗證。
[1]錢小娟.某型APU控制系統(tǒng)的設(shè)計與臺架試車[J].航空兵器,2008,(3):42—44.
[2]趙 琳,樊 丁,陜薇薇.單軸航空渦扇發(fā)動機數(shù)學模型辨識[J].推進技術(shù),2008,29(6):733—736.
[3]方崇智,蕭德云.過程辨識[M].北京:清華大學出版社,1988.
[4]刁啟娜,王 曦.系統(tǒng)辨識在航空發(fā)動機中的應(yīng)用[C]//.中國航空學會第十一屆發(fā)動機自動控制學術(shù)討論會議.2002.
[5]劉叔軍,蓋小華,樊 軍,等.Matlab7.0控制系統(tǒng)應(yīng)用與實例[M].北京:機械工業(yè)出版社,2006.
[6]Ljung L J.Matlab System Identification Toolbox User’s Guide[M].The MathWork,Inc.,2003.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
民用飛機設(shè)計與研究(2019年2期)2019-08-05 01:33:40
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車與新動力(2015年1期)2015-02-27 12:11:01