永磁同步電機弱磁調速系統建模及仿真研究
2010-08-10 02:57:24張樹團李偉林魯芳張海鷹
船電技術 2010年6期
張樹團 李偉林 魯芳 張海鷹
(1. 海軍航空工程學院控制工程系,山東 264001; 2. 西北工業大學自動化學院,西安 710072)
1 引言
永磁同步電動機(PMSM)具有效率高、轉動慣量小等優點,在高性能的調速傳動系統中有良好的應用前景。但是永磁同步電動機在恒功率運行區域,隨著轉速升高,由于供電電壓的限制及電流控制器的飽和影響,嚴重損害PMSM的電磁轉矩性能,難以提高弱磁運行范圍。本文針對永磁同步電機矢量控制系統,著重研究分析如何提高其弱磁調速的恒功率調速比,提出了一種基于電流調節的PMSM定子磁鏈弱磁控制算法,保證永磁同步電機在整個弱磁調速區以最大轉矩電流比運行。其q軸電流由外部轉矩、轉速給定和母線電壓值的變化來決定,d軸電流分量則由q軸電流值和轉速值來決定。在Matlab/Simulink中建立了PMSM弱磁控制系統的仿真模型,仿真結果表明,該弱磁控制算法有效地拓展了永磁同步電機的恒功率從調速范圍。
2 永磁同步電機數學模型
以二相導通星形三相六狀態為例,分析PMSM的數學模型及轉矩特性。為建立永磁同步電動機的轉子軸(dq軸)數學模型,作如下假定:
(1)三相繞組完全對稱,氣隙磁場為正弦分布,定子電流、轉子磁場分布對稱;
(2)忽略齒槽、換相過程和電樞反應等影響;
(3)電樞繞組在定子內表面均勻連續分布;
(4)磁路不飽和,不計渦流和磁滯損耗。
則三相繞組的電壓平衡方程式可表示為
式中,ua,ub,uc為定子繞組的相電壓;
Rs為定子每相繞組電阻;
ia,ib,ic為定子繞組相電流;
Ls為定子每相繞組的自感;
M為定子每相繞組的互感;
p為微分算子p=d/dt;
ψf為轉子永磁體磁鏈;
θ為轉子位置角,即轉子q軸與a相軸線的夾角。
因為三相繞組為星型連接,有ia+ib+ic=0,則式(1)可簡化為:
式(2)為永磁同步電機在abc靜止坐標系下的電壓方程。利用坐標變換,把abc靜止坐標系變換到dq轉子坐標系,得到相應的動態電壓方程:

式中,ωr為轉子電角速度;Ld、Lq為直、交軸同步電感。
在d、q坐標系下電機的電磁轉矩為:

式中,Pn表示電機極對數。
3 弱磁控制原理
永磁同步電機中,感應電勢隨著轉速的增加而增加,當電機的端電壓達到控制器直流側電壓時,PWM控制器將失去追蹤電流的能力。因此定子端電壓Us和相電流Is,受到逆變器輸出電壓和輸出電流極限(Usmax和Ismax)的限制。由此可得電流極限圓

電壓極限橢圓

又因為E0=ωψf,xd=ωLd,xq=ωLq,所以電壓極限橢圓方程可以改寫為

永磁同步電動機的運行范圍是受以滿足電流極限圓和電壓極限橢圓為條件限制的,即電機的電流矢量Is(其分量為Id與Iq)應處于兩曲線共同包圍的面積內,如圖1中陰影部分所示。由圖1可以看出,電機轉速ω升高,Id分量趨于增大,相應的Iq分量必須減小,因此,電機的電磁轉矩也隨轉速升高而下降,顯示出恒功率的特性。
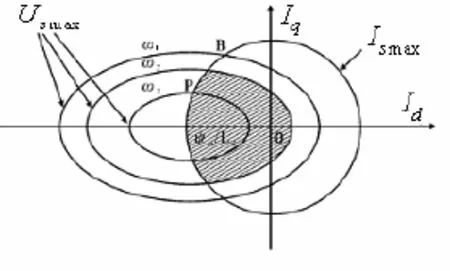
圖1 PMSM電壓電流限制曲線
4 基于Matlab的PMSM弱磁控制系統仿真模型建立
在Matlab6. 5的Simulink環境下,利用SimPower2 System Toolbox2. 3豐富的模塊庫,在分析PMSM數學模型的基礎上,提出了建立PMSM弱磁控制控制系統仿真模型的方法,弱磁控制系統總體設計框圖見圖2。
PMSM弱磁控制建模仿真系統采用雙閉環控制方案:速度環為控制外環,它使電機的實際轉速與給定的轉速值保持一致,實現電機的加速、減速和勻速運行,并且及時消除負載轉矩擾動等因素對電機轉速的影響。電流環為控制內環,它的作用是控制逆變器在定子繞組上產生準確的電流。根據模塊化建模的思想,將圖2中的控制系統分割為各個功能獨立的子模塊,其中主要包括:PMSM本體模塊、矢量控制模塊、電流滯環控制模塊、速度控制模塊、弱磁控制模塊等,通過這些功能模塊的有機整合,就可在Matlab/Simulink中搭建出PMSM控制系統的仿真模型,并實現雙閉環的控制算法。
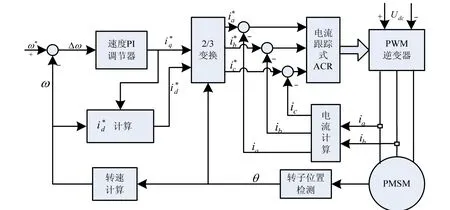
圖2 PMSM弱磁控制系統總體設計框圖
4.1 PMSM本體模塊
在整個控制系統的仿真模型中,PMSM本體模塊是最重要的部分。Matlab/ Simulink的工具箱提供了按交直軸磁鏈理論建立的定子繞組按Y型連接的 PMSM 模塊。PMSM模塊共有四個輸入端,其中前三個輸入端,分別為A相、B相、C相輸入端,第四個輸入端為轉矩輸入端T1(N·m)。當T1>0時,為電動機模式;當T1< 0時,為發電機模式。PMSM的主要設置參數包括:定子電阻R(?);交直軸定子電感Ld, Lq(H);轉子磁場磁通Ф (Wb);轉動慣量 J(kg·m2);粘滯摩擦系數B(N·m·s);電機的極對數 p 等。
4.2 矢量控制模塊
dq向abc轉換模塊主要是根據轉子的位置角即圖2中的θ,按照dq變換的反變換公式產生三路基準信號,dq變換的反變換公式如下
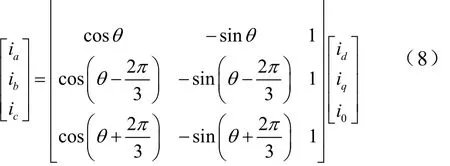
式(8)中包含了零序分量,在對稱三相條件下,沒有零序分量,dq向abc轉換結構框圖如圖3所示。dq向abc轉換模塊輸出三路基準信號,該曲線的橫坐標按轉子位置標注,縱坐標按電流標注。三根曲線分別代表對應與轉子的某一位置的三個繞組各自驅動電流瞬時值,通過矢量合成可知此刻的旋轉磁場矢量的角度。
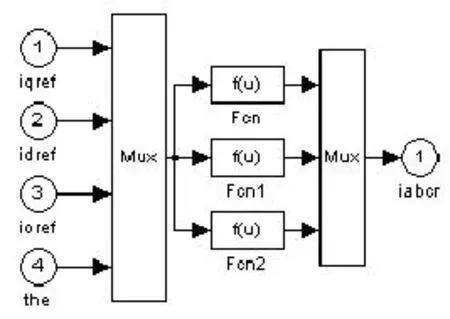
圖3 dq到abc轉換結構框圖
4.3 電流滯環控制模塊
三相電流源型逆變器模塊是按照矢量控制理論,利用滯環電流控制方法,實現電流逆變控制。輸入為三相參考電流和三相實際電流,輸出為逆變器電壓信號,模塊結構框圖如圖4所示。
當實際電流is經過慣性環節1/Ts+ 1低于參考電流isr且偏差大于滯環比較器的環寬時,電機對應相正向導通,負向關斷;當實際電流is經過慣性環節1/ Ts+ 1超過參考電流isr且偏差大于滯環比較器的環寬時,對應相正向關斷,負向導通。選擇適當的滯環環寬,即可以實際電流不斷跟蹤參考電流的波形,實現電流閉環控制。
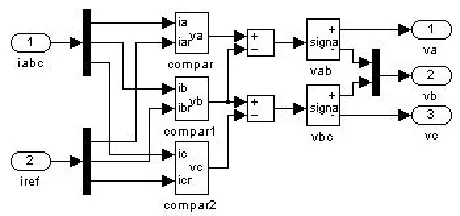
圖4 三相電流源型逆變器模塊結構框圖
4.4 速度控制模塊
速度控制模塊的結構較為簡單,如圖5所示,參考轉速和實際轉速的差值為單輸入項,三相參考相電流的幅值iqref為單輸出項。其中,Ki為PI控制器中P(比例)的參數,K/T1為PI控制器中I (積分)的參數,飽和限幅模塊將輸出的三相參考相電流的幅值限定在要求范圍內。
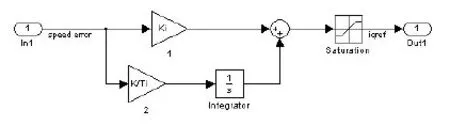
圖5 速度控制模塊結構圖
4.5 弱磁控制模塊
電機在恒轉矩區運行時,直軸電流i*q的計算公式如下

電動機轉速超過基速時,恒功率運行,i*d切換為下面公式計算

式中,Ld為永磁同步電機直軸電感;Lq為永磁同步電機交軸電感;Rs為定子繞組的電阻;ω為感應電動勢的電角度。
5 仿真結果
在前面理論分析的前提下,本文基于Matlab/Simulink建立PMSM弱磁控制系統的仿真模型,并對該模型進行了PMSM雙閉環控制系統的仿真。PMSM電機仿真參數設置:相繞組電阻R為2.87 ?,極限電壓值Usmax為240 V,d軸電感分量Ld為388.5 mH,極限電流值Ismax為1.6 A,q軸電感分量Lq為475.5 mH,起始機械轉矩Ti為5 N?m,永磁磁鏈ψM為447,機械轉矩變化時刻t為0.015 s,極對數p為4,最終機械轉矩Tend為3 N?m。通過仿真試驗表明,轉速達到基本轉速以后,若不加該電流弱磁控制算法,繼續升速的空間很小。采取了本文提出的電流調節算法以后,永磁同步電機的弱磁調速區域明顯擴大,恒功率運行區域調速比達到了4:1;最高轉速達到2200 rad/s,轉速為1600 rad/s時的仿真波形如圖6到圖8所示。
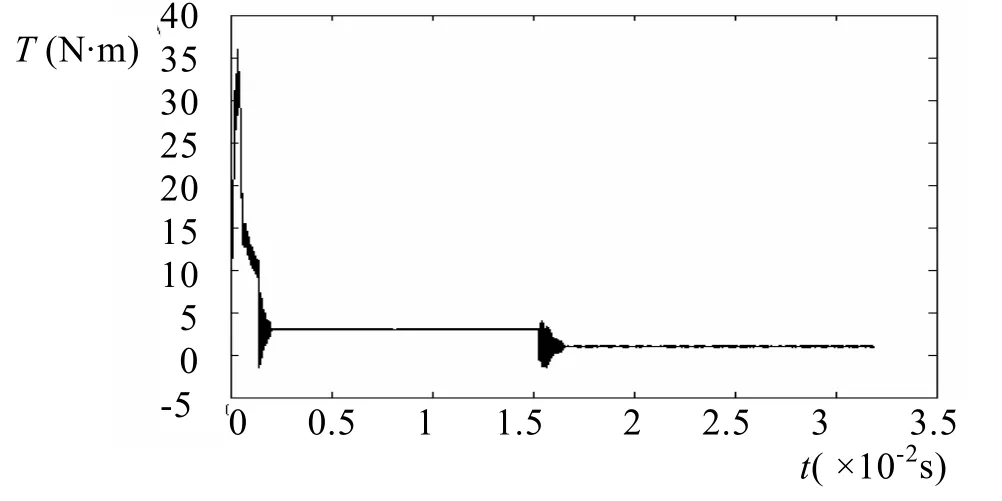
圖6 轉矩響應曲線
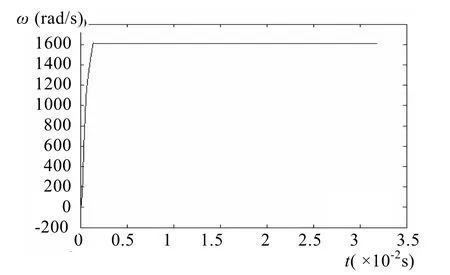
圖7 轉速相應曲線
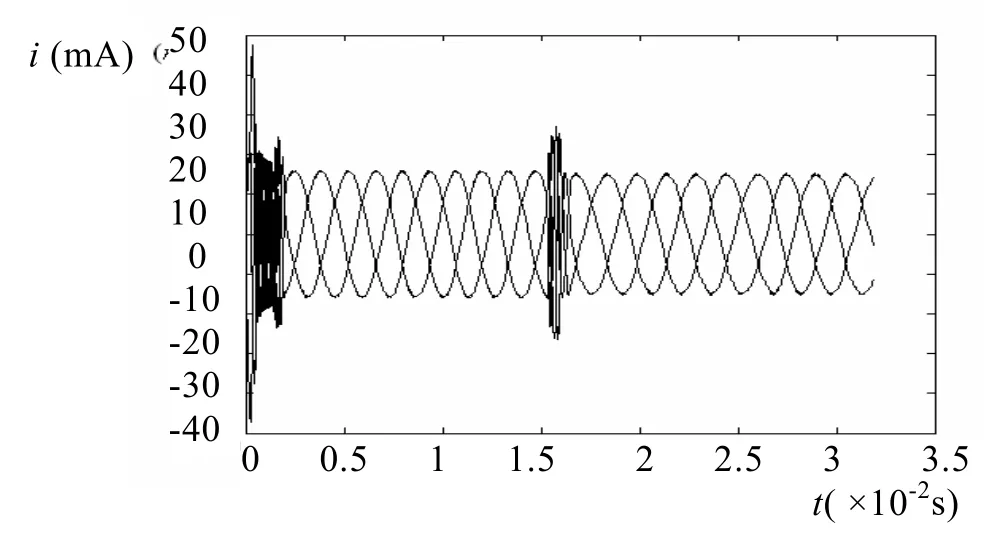
圖8 三相電流仿真波形
由仿真波形可以看出:在轉速為1600 rad/s時,系統轉矩響應快速且平穩,三相電流波形較為理想,轉速響應快且穩態運行時無靜差,具有較好的靜態和動態特性。
6 結束語
本文在分析 PMSM 數學模型的基礎上,提出了一種基于電流調節的 PMSM 定子磁鏈弱磁控制算法。仿真實驗結果表明,本文提出的方法拓寬了電動機弱磁調速范圍,有效地提高了恒功率運行區域的調速比,轉速響應迅速,轉矩變化平穩,系統具有良好的動態和穩態性能,達到預期的設計指標要求。采用該PMSM仿真模型, 可以便捷地實現、驗證電流調節的弱磁控制算法,也可對其進行簡單修改或替換,完成控制策略的改進,通用性較強。
:
[1]A.K; Sulkowski ,W.; Aga, L. A. ;Norum, L. A Fully Digital Permanent Magnet Synchronous Motor Drive with Flux Weakening Adnanes.[J]. Electrical Machines and Drives, 1991. Fifth International Conferenceon (Conf. Publ. No. 341)1991, (341):11-13.
[2]Ho, P. K.; Lee, C. K.. Modeling and Simulating of a Permanent Synchronous Motor Under the Flux-weakening Control[J]. Industrial Electronics,1998. Proceedings. ISIE′98. IEEE International Symposiumon, 1998, (2): 462-467.
[3]Sozer, Y.; Torrey, D. A. Adaptive Flux Weakening Control of Permanent Magnet Synchronous Motors[J].Industry Applications Conference, 1998. Thirty-Third IAS Annual Meeting. The 1998 IEEE, 1998,(1):475-482.
[4]許強, 賈正春, 許錦興. 作主軸傳動的永磁同步電機弱磁控制系統[J].華中理工大學學報,1993,21(2):31-36.
[5]冷再興, 馬志源. 一種新的內置式永磁同步電機弱磁調速控制方法[J].微電機,2006,39(6):11-14.
[6]唐任遠. 現代永磁電機理論與設計[M]. 北京:機械工業出版社,1997.
[7]張平. .MATLAB基礎與應用簡明教程[M]. 北京:北京航空航天大學出版社,2001.
[8]Shigeo Morimoto, Yi Tong, Yoji Takeda, et al. Loss Minimization Control of Permanent Magnet Synchronous Motor Drives[J]. IEEE Trans. on Industrial Electronics, 1994, 41(3):511-516.
[9]Chan C C, Chan K T. An Advanced Permanent Magnetic Motor Drive System for Battery-powered Electric Vehicles[J]. IEEE Trans. on Vehicular Technology, 1996, 45(1):180-188.
[10]Sadegh Vaez, M A Rahman. Adaptive Loss Minimization Control of Inverter-fed IPM Motor Drives[J]. IEEE Conference of PESC'97 Record,1997,35(5):861-868.