一種氣動式深度模擬器設計
2010-08-10 02:56:22閆曉偉
船電技術 2010年11期
閆曉偉
(92060部隊,遼寧大連 116041)
1 引言
氣動技術采用壓縮空氣作為工作介質,具有介質提取處理方便、工作環境適應性好、空氣流動阻力小、維護簡單、使用安全和成本低廉等優點,被越來越廣泛應用于生產過程和自動控制的各個領域。可是由于空氣可壓縮性大,動作速度易受負載變化而變化,人們對氣動位置和速度反饋難以精確控制。隨著高性能的氣動元件的出現,氣動技術正在向機電一體化、集成化、智能化、小型化、輕量化、高精度和高速度方向發展。
本文提出一種氣動式深度模擬器,它采用氣動比例方向控制閥作為執行機構,利用自動控制技術調節進入和排出密閉容器中的氣體,產生所需要的壓力信號,在實驗室條件下模擬產生不同水深的水壓物理信號,作為信號源,可用于水下航行器和水中兵器的仿真實驗。
2 系統組成及工作原理
深度模擬器由壓力產生單元、壓力控制單元和壓力輸出單元三部分組成。壓力產生單元包括空壓機、高壓氣瓶、過濾減壓閥、進氣/排氣比例閥和密閉容器;壓力控制單元包括壓力變送器、控制器和計算機及相關控制軟件和數學模型,是模擬器的核心;壓力輸出單元包括小深度輸出接口和大深度輸出接口,系統框圖如圖1所示。
該系統的工作原理是:空壓機為系統提供持續的壓力源,并將一部分氣體儲備在高壓氣瓶,系統由預定模型計算出需要模擬的壓力變化曲線,由壓力變送器實時檢測密閉容器中的氣體壓力,作為反饋信號,輸入控制器與模型參數進行比較,得到不同時刻的誤差和誤差變化率,采用模糊PID算法,計算得到輸出電壓信號,控制進/排氣比例閥的開度,調節密閉容器中的氣體壓力,使其按預先設定的壓力曲線變化,并滿足設計的精度要求,達到模擬不同水深下壓力信號的目的。
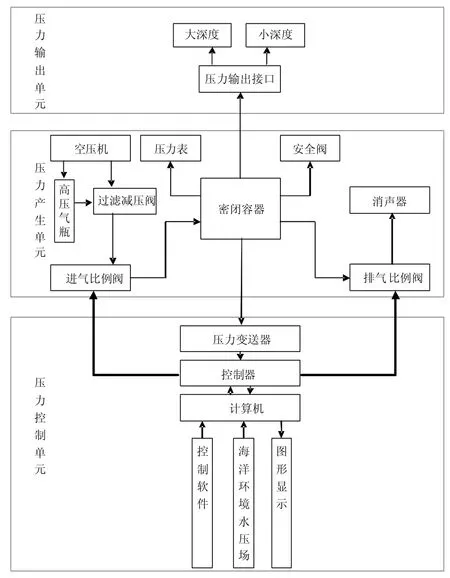
圖1 深度模擬器原理框圖
3 理論分析
3.1 密閉容器充放氣過程的簡化模型
本文研究的模擬器的壓力是由密閉容器產生的,密閉容器內的壓力變化就是模擬的壓力變化,因此要根據氣動理論分析影響密閉容器內氣體壓力變化的因素,建立密閉容器氣體壓力變化的數學模型,這是研究氣動式深度模擬器的理論依據。
密閉容器的充放氣過程是開口系統問題[1],容器內的空氣與外部不僅有質量交換,還有能量交換。由于體積V不變,容器內空氣的變化量僅限于壓力P和溫度T兩個變量。空氣的質量m盡管也變化,但不獨立,它可以根據理想氣體狀態方程,由壓力P和溫度T算出來。

從壓力微分方程、溫度微分方程、連續性方程和伯努利方程入手[2],分析音速和亞音速流動時,氣體流量公式及其影響因素。可以得到:容器內壓力變化:式中,k為比熱比;R為氣體常數,空氣為287 J/(kg·K);為進出容器的空氣質量流量,kg/s;空氣流入時qm為正,流出時qm為負;V’為容器的容積,m3;T2為容器內氣體溫度。
密閉容器的充放氣過程簡化為如圖2所示:

圖2 密閉容器充放氣過程的結構簡圖

式中,ρ0為標準狀態下空氣的密度,ρ0=1.185 kg/m3。
充氣時:

放氣時:

式中,qv1和qv2為標準狀態下充氣和放氣時的體積流量,m3/s;P1和T1為氣源氣體的壓力和溫度,單位分別為Pa和K;P2和T2為容器內氣體的壓力和溫度,單位分別為Pa和K。
容器內氣體壓力隨時間變化的數學模型為:

由于比例閥的臨界頻率是100 Hz,其動態特性較好,可將其動態響應視為一階比例環節,閥的有效流通截面積Ax與控制電壓U成線性關系:

式中,Kv為比例系數;ω為百分比,ω=0~1。
由上面的分析,可以得出:充/放氣過程中密閉容器的氣體體積流量qv與比例閥的有效流通截面積Ax、氣源壓力P1和溫度T1、容器內壓力P2和溫度T2有關。當閥選定時,Kv即為常數,假設充/放氣過程中氣源壓力P1保持恒定,忽略T1和T2的影響,則qv可看作是比例閥的有效流通截面積Ax和容器內壓力P2的函數,即:

函數式(7)為非線性函數,當系統處于某穩定點(Ai, Pi)時,可以用線性化理論對其進行線性化,即可利用增量方程進行系統的動態特性分析。令

則:

對(9)按泰勒公式展開,忽略二階以上無窮小項,得:

令,則(10)可寫為:

對(1)、(6)和(11)式進行拉普拉斯變換,聯立得方程組:
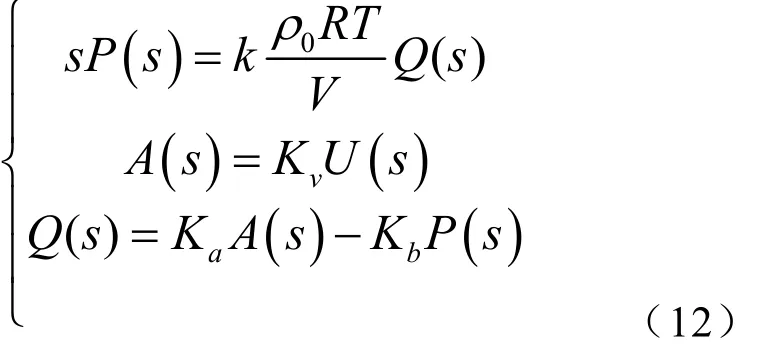
對方程組(12)求解,得控制電壓U對密閉容器內氣體壓力P的傳遞函數,即:

式中,

密閉容器充放氣過程簡化模型為一階慣性系統,K為傳遞系數,Tp為慣性時間常數。
3.2 模糊PID控制算法
由于氣體壓力控制系統本質上是非線性系統,很難建立精確的數學模型,系統的動態特性主要取決于控制算法和控制參數。傳統的PID控制由于算法簡單、參數調整方便并具有一定的精度,在過程控制中獲得了廣泛的應用,但由于PID的參數不易實時調節,很難適應參數實時變化的非線性系統。而模糊控制針對復雜的、具有不確定參數和難以建立精確數學模型的系統具有適應性強、魯棒性好的優點,但對消除系統穩定誤差的性能比較差,難以達到較高的控制精度。采用模糊PID算法既有適應性強、魯棒性好的優點,又能消除穩定誤差,可以實現對氣體壓力的精確控制。其原理如圖3所示。
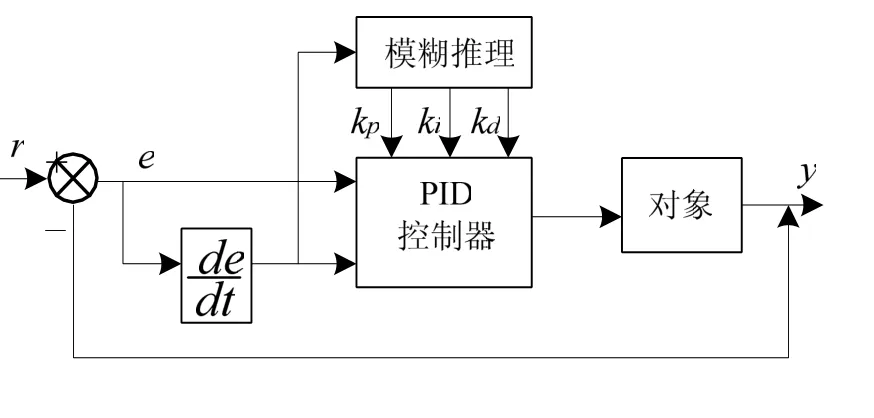
圖3 模糊PID控制原理圖
在本系統中,控制變量是密閉容腔內的氣體壓力,取壓力的誤差e(e=y-r)和誤差變化率ec(ec=de/dt)作為模糊控制器的二維輸入變量,輸出電壓信號uc作為模糊控制器的輸出變量。
將e和ec的實際變化范圍轉換成模糊域上的集合,選用合適的隸屬度函數,并對模糊集進行分檔;采用Mamdani的max-min法[3]進行模糊推理,得出uc的隸屬度函數。由數據和模糊語言控制規則,根據每一條推理規則,結合模糊判決,經過大量計算,構成模糊控制器查詢表,利用模糊控制規則在線對PID參數進行修改。
4 關鍵技術及具體實施方案
模擬器分硬件部分和軟件部分。硬件部分由空壓機、高壓氣瓶、壓力罐、過濾減壓閥、進氣/排氣比例閥、安全閥、壓力表、壓力變送器、控制器和計算機組成。軟件部分包括LabVIEW軟件和MATLAB軟件。利用MATLAB軟件強大的計算功能,產生要仿真的數學模型,主要是建立不同深度和海況的水壓場模型,通過LabVIEW中的“腳本節點”函數中的“MATLAB腳本”即可生成模型信號數據文件;LabVIEW主要用來設計系統的界面,實現人機交互,包括參數預置、數據文件導入和導出、圖形顯示及實驗數據分析處理;其軟件工作流程如圖4所示。
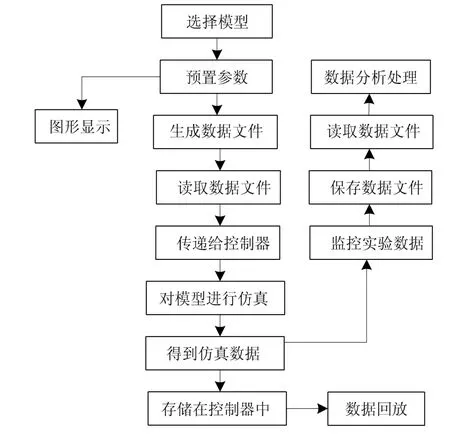
圖4 模擬器的軟件工作流程圖
4.1 進/排氣比例閥
比例閥的選型應遵循安全性、可靠性、適用性和經濟性四項原則和六個方面的現場工況(管道參數、介質參數、壓力參數、電源參數、動作方式、特殊要求),其中額定流量的選擇是關鍵。密閉容器氣體壓力變化與進氣/排氣比例閥的開度有關,比例閥的開度是由控制電壓或電流決定的。
采用直動式滑閥控制,單向流動,工作電壓24 V,控制電壓0-10 V,標準額定流量350 L/min,響應頻率100 Hz。采用硬性密封方式,可任意位置安裝,比例控制閥最大的特點就是可以根據控制電壓或電流的大小來成比例地調節流量,理論上流量可以從0-100%,本文采用電壓控制。
4.2 壓力變送器
采用雙量程設計,小量程0~5 bar,用于0~50 m水深;大量程0~35 bar,用于0~300 m水深;精確度0.05%,總誤差0.25%,工作電壓24 V。
4.3 控制器
包括兩路模擬量輸入和兩路模擬量輸出,接收壓力變送器實時采集的壓力罐中的壓力信號,對模型進行分析計算,輸出模擬控制信號,對進/排氣比例閥的開度進行調節,使壓力罐中的壓力跟蹤模型的壓力變化曲線。
控制器是仿真系統壓力控制單元的關鍵部分,主要有三個方面的作用:第一,采集壓力變送器的檢測值,與設定值比較,計算出偏差及偏差的變化率;第二,由控制算法計算出比例閥的控制電壓,實時調節比例閥的開度;第三,與計算機進行通信,導入模型數據,導出實驗數據。
4.4 計算機
計算機作為和控制器的通信平臺,主要作用是:第一,產生要模擬的模型數據文件;第二,和控制器進行通信,完成模型數據及和實驗數據的導出;第三,對實驗數據進行后期處理。
5 結束語
本文提出的氣動式深度模擬器的方案,具有深度范圍大、動態響應好、精度高的特點,另外操作方便、不污染環境,但在空壓機工作時有一定的噪音。針對氣動技術的特點,可以得到:
(1)空壓機輸出的壓力級不高(一般小于0.8 MPa),可以滿足淺水(50 m)的氣源要求;但大深度(>50 m)時,需加裝高壓氣瓶,作為氣源,同時壓力容器和管路要滿足耐壓要求;
(2)對氣動理論進行分析,特別是密閉容器充放氣過程簡化模型的建立,通過實時調節比例閥的開度來控制容器內的壓力變化是可行的。另外采用雙量程高精度壓力變送器,使模擬器既有大的工作范圍,同時在小深度時又具有高的精度;
(3)由于氣體本身的可壓縮性和控制器在PID調節時的滯后性,在模擬低頻數據時具有很好的效果。
:
[1]蔡茂林. 現代氣動技術理論與實踐第二講: 固定容腔的充放氣[J]. 液壓氣動與密封,2007, (3): 43-47.
[2]徐炳輝. 氣動手冊[M]. 上海: 上海科學技術出版社,2005: 1-20.
[3]張化光, 孟祥萍. 智能控制基礎理論及應用[M]. 北京: 機械工業出版社, 2005:1-8, 116-133.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48