復雜可編程器件和單片機在坐標測試中的應用
2010-08-21 12:33:22趙冬娥
探測與控制學報 2010年3期
徐 健,趙冬娥,鄧 均,黃 智
(中北大學電子測試技術國防重點實驗室,儀器科學與動態測試教育部重點實驗室,山西太原 030051)
0 引言
彈丸的彈著點坐標測量是武器系統中不可缺少的一項重要指標,也是各種武器研制、試驗和驗收必須測試的重要參數[1]。彈丸射擊精度同時也是部隊訓練、考核的一項重要措施。能否精確地測量出武器系統的射擊精度,將對提高武器系統的研制水平和部隊戰斗力有著極其重要的意義[2-3]。
目前國內外測坐標方法很多,光電測坐標法以其測試精度高、可靠性好、成本低廉等優點常成為眾多測坐標方案的首選[4],但傳統的光電測坐標系統在坐標采集和處理方面也有不足之處。文獻[5]是目前國內應用的比較先進的測坐標系統,但是沒有具體提到信號采集和處理的方法。文獻[6]實現了示靶、檢靶、自動報靶的一體化,但在信號的處理方面有些不足。首先由于傳統的微控制器I/O口不足,使其不得不使用串聯編碼器的方法來擴展管腳,這樣會使系統整個運行速度下降,且不能保證時序,無法準確探測高速運動物體的坐標,同時無法適應大靶面的需求。其次,由于傳統微控制器的處理速度慢,使這種系統無法測試子彈連發的坐標[7]。
針對這些問題,本文將復雜可編程器件(CPLD)和51單片機相結合,用于激光光幕坐標靶測試,充分發揮CPLD I/O口眾多、響應速度快和單片機控制方便的特點。
1 Altera CPLD和51單片機
文獻[5]介紹了一種實彈射擊精確自動報靶系統。在該系統中,發光二極管發射平行光束,光電二極管組成接收傳感器陣列,共同組成光電靶。子彈穿過靶遮擋光束,X、Y軸對應的光電二極管輸出脈沖信號,通過編碼形成8位二進制地址碼,利用單片機進行數據處理。為了解決I/O口不足的問題,文獻[5]不得不采用13片74148芯片的8-3線編碼器組合成100-8線編碼器,這樣做不僅連線繁雜而且無法適應大靶面的需求。而用CPLD和單片機相結合,就可以很好地解決這些問題。
Altera公司的MAX7000系列以Altera公司的第二代MAX結構為基礎,以先進的CMOS工藝制造。基于 EEPROM的MAX7000系列可提供600~5000個可用的門電路、ISP、引腳間5 ns的延時以及高達175.4 MHz的計數速度。MAX7000系列器件主要有MAX7000、MAX7000E、和MAX7000S等系列產品[8]。綜合考慮反應速度、I/O口等因素,選擇MAX7000S作為坐標采集的一部分。
STC89C52是一種低功耗、高性能CMOS 8位微控制器,具有8 KB在系統可編程Flash存儲器。使用高密度非易失性存儲器技術制造,與工業80C51產品指令和引腳完全兼容。片上Flash允許程序存儲器在系統可編程,亦適于常規編程器。在單芯片上,擁有靈巧的8位CPU和在線系統可編程Flash,使得STC89C52為眾多嵌入式控制應用系統提供靈活、有效的解決方案。
2 CPLD和單片機應用于彈丸坐標測試
2.1 控制和采集
激光光幕測坐標靶的控制和采集部分由單片機STC89C52和CPLD MAX7192S組成。控制部分的框圖如圖1所示,由于X軸和Y軸的采集系統相同,故只畫出Y軸的系統框圖。
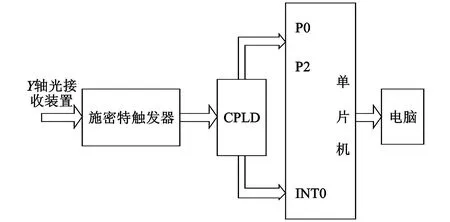
圖1 控制和采集框圖Fig.1 Control and acquisition block diagram
激光光幕測坐標靶的原理與文獻[6]相似,也是對X、Y軸的輸出脈沖信號進行處理,在此不贅述。從圖1中可以看出,輸出脈沖信號經過施密特觸發器,使輸出的電壓滿足CPLD的電壓要求。
2.2 CPLD和單片機的軟件處理
軟件的處理主要分為CPLD和單片機的軟件處理,其中要用到的信號如表1所示。
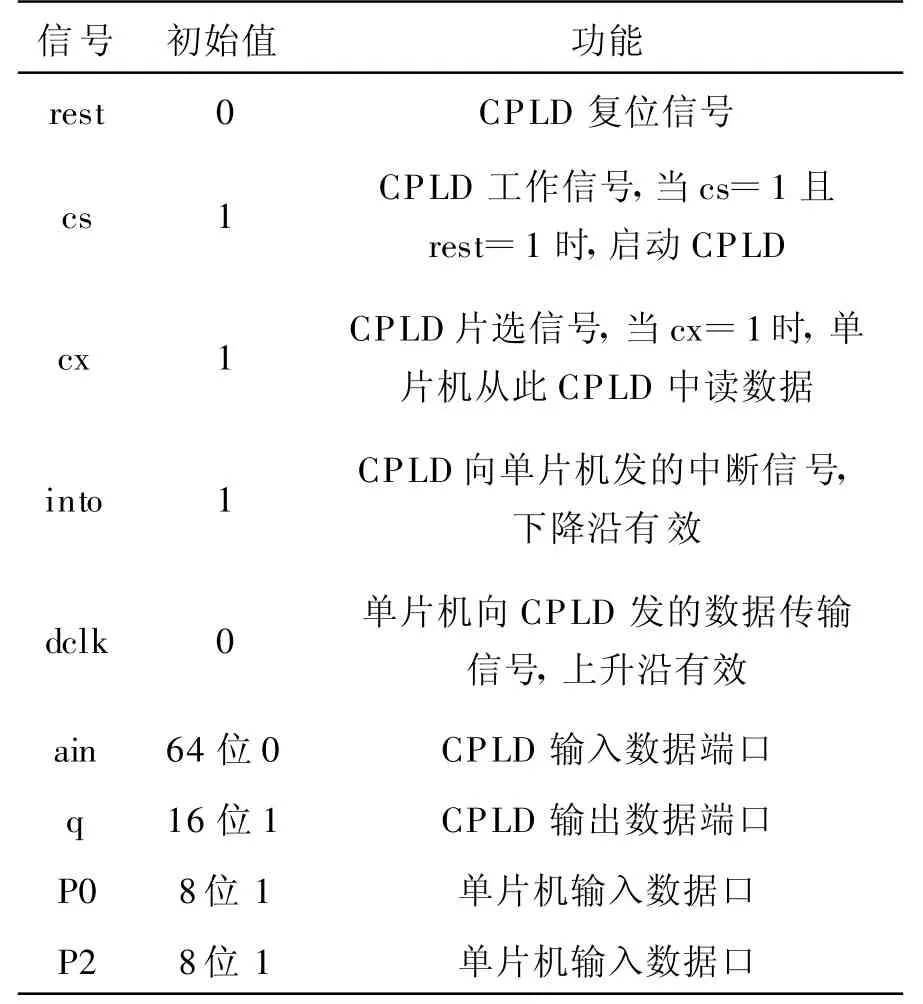
表1 信號功能表Tab.1 Signal function table
CPLD主要負責信號的并行采集,由于I/O口豐富,可以并行采集80路數據,免去了串聯編碼芯片的繁雜。工作的流程圖如圖2所示。
單片機主要負責將CPLD傳輸來的數據轉換成坐標數據,然后進行顯示。工作流程圖如圖3所示。
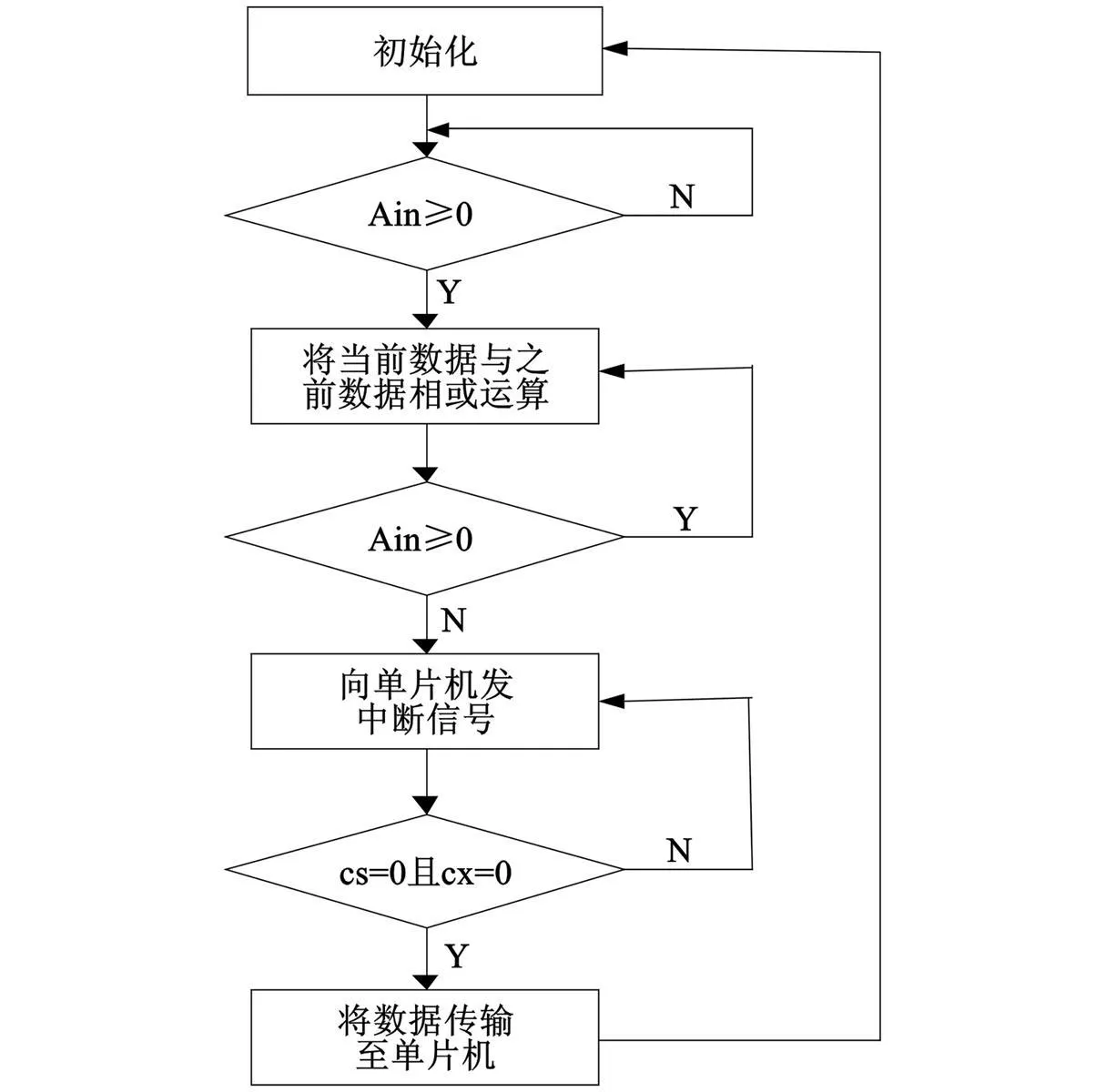
圖2 CPLD工作流程圖Fig.2 CPLD workflow diagram
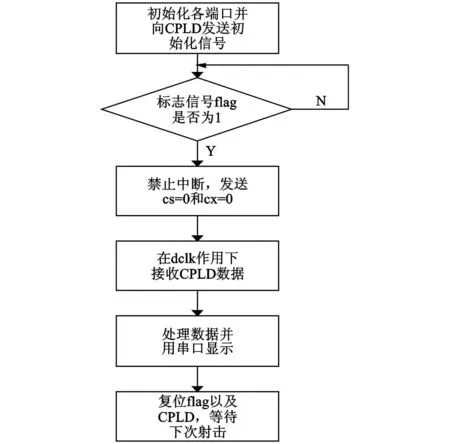
圖3 單片機工作流程圖Fig.3 MCU workflow diagram
3 理論證明及驗證
3.1 理論證明
為了能使CPLD和單片機應用到彈丸坐標的測試中,首先應該滿足的條件就是有足夠快的反應速度。這里設定彈丸長度為3 cm,光幕寬度為 0.5 mm,彈丸通過光幕時,采集裝置必須在這35 mm的路徑之內對彈丸飛行坐標進行采集。設彈丸速度為1 000 m/s,則彈丸從遮擋光幕到飛出光幕的時間為35μs,設置CPLD的采集間隔為20 nm,這樣在35 mm的路徑中,CPLD已經對同一個彈丸的坐標值采集了1 750次,絕對滿足彈丸坐標數據的采集。但如果將這1 750次的數據全部傳輸給單片機,不僅造成數據的擁塞,還會給單片機的處理造成麻煩,所以CPLD將這1 750次數據進行相或的運算,得出一組數據,這樣不僅保證了準確度,而且需要傳輸的數據量也不大。
對于連發彈丸的測試,往往不能采用邊采集邊發送的方式,因為串口的傳輸速率最高為115 200 b/s,在測連發或者測試靶面大的情況下,數據無法及時地傳輸。所以,要在CPLD中先對數據進行存儲,待射擊完畢后,再將數據逐一讀出。
對于51單片機,這里使用的是11.0592 MHz的晶振,每個機器周期為1μs左右,為了使單片機不拖延CPLD的運行速度,這里采用采集和處理相獨立的方法,單片機的處理速度不會影響到FPGA的采集速度,因此不會影響系統性能。
此外,CPLD的還有I/O口眾多的優點,彌補了其他處理器的采集端口不足的缺點,如果要求的測試靶面較大,可以采用CPLD拼接的方法,利用多個CPLD并行采集,系統的響應速度也不會降低。
3.2 仿真
CPLD工作仿真圖如圖4所示。CPLD初始化后,當ain不為0時,CPLD開始采集,當ain再次回到0時,into發出下降沿,單片機將cs拉低后,在4個dclk脈沖之后,將q信號讀到單片機中。在整個系統中,CPLD獨立完成數據的采集以及儲存,這樣做的好處是可以發揮CPLD I/O資源豐富、速度快的優點,在采集連發數據時,CPLD可以將數據先保存到其自帶的RAM中,等待單片機完成后續任務。
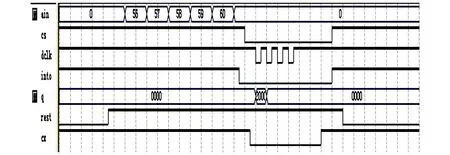
圖4 CPLD工作仿真圖Fig.4 CPLD work simulation diagram
4 靶場坐標測試實驗
為了測試CPLD和單片機應用在激光測坐標靶中的性能,進行了現場實彈射擊實驗,用某半自動步槍發射直徑為7.62 mm的子彈,彈丸速度約為750 m/s,通過串口顯示阻擋Y軸探測器的路數。Y軸測試長度為64路信號(可擴展),靶紙位置距光敏二極管陣列為2 m,光幕寬度約為5 mm,由于接收裝置選用了直徑為8 mm的光敏二極管陣列,所以本系統的精度為±4 mm,且子彈通過光幕最多遮擋兩路信號。測試數據如表2所示。
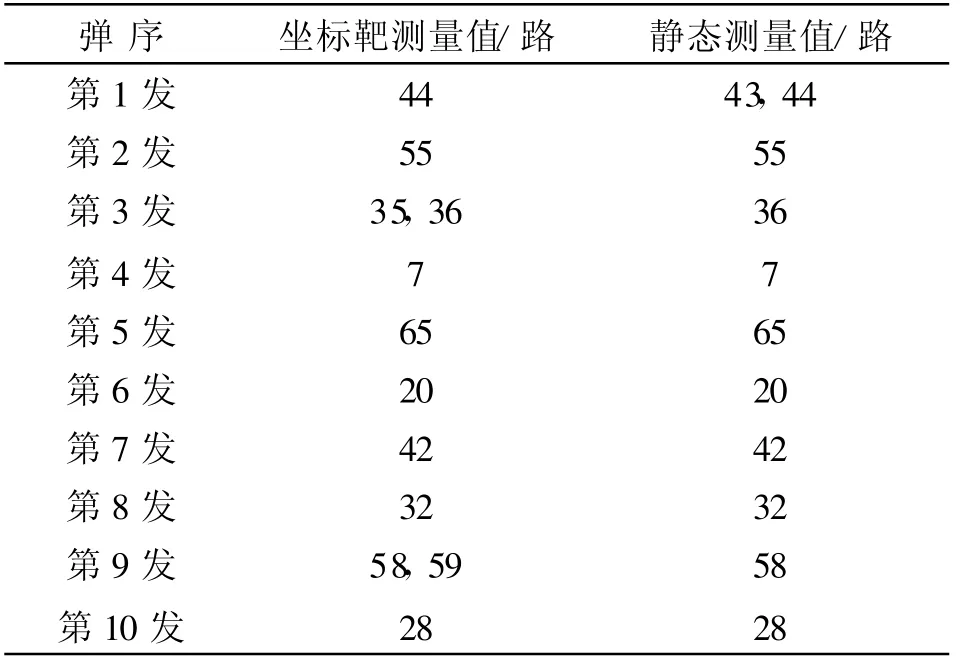
表2 試驗數據Tab.2 Experiment data
從實際測得的10發子彈的彈著點坐標數據中,可以看出:彈著點分布于整個有效靶區范圍內,即在靶區的任何位置,CPLD和單片機都能夠準確地顯示坐標數據。
在試驗數據中,發現有部分實驗數據和比對數據出現偏差,分析原因是因為每次子彈通過坐標紙后,以相同直徑的鐵棒插進彈孔,然后查看光敏二極管陣列中哪幾路被擋光,由于人為因素,插入彈孔的鐵棒不一定能與地面保證平行,且不一定能準確反映子彈彈道,所以應該以顯示數據為準。
實驗沒有對連發彈丸進行彈著點坐標的測試,因為在單發測試中已經表明,只要滿足CPLD的反應速度,就可以準確地捕捉到彈丸的過靶信號。
5 結論
本文在對比文獻[5]和[6]的基礎上,將復雜可編程器件(CPLD)和單片機相結合,用于激光光幕坐標靶測試。經使用CPLD來代替眾多編碼器的串聯,同時利用單片機控制的靈活性對采集數據進行處理。
理論和實踐都表明:由CPLD和單片機組成的數據處理、采集裝置應用在激光光幕測坐標系統中,不僅繼承了光電靶的眾多優點,滿足不同尺寸彈丸飛行坐標的測試,還解決了傳統激光光幕測坐標靶的處理器I/O緊缺、處理速度慢等缺點,可實現靶場對于彈丸坐標采集所要求的響應速度快、可測連發的要求,同時CPLD和單片機可應用在大靶面的坐標測試中,同時保證較高的測試精度和較小的誤差。
此外,它不僅能測試彈丸的彈著點坐標,還可以測試高速物體的飛行軌跡以及速度,應用前景比較廣闊,在軍事、反恐、安檢、商業等方面都可以得到很好的應用。
[1]王昌明.實用彈道學[M].北京:國防工業出版社,1994.
[2]趙玉姝,趙冬娥,趙輝.一種新型激光測速系統的設計與應用[J].彈箭與制導學報,2008,28(4):285-287.ZHAO Yushu,ZHAO Dong'e,ZHAO Hui.A novel system of laser screens for velocity measurement based on MCU[J].Journal of Projectiles,Rockets,Missiles and Guidance,2008,28(4):285-287.
[3]黃智,趙冬娥.虛擬儀器和PCI總線在光測彈速中的應用[J].探測與控制學報,2010,32(1):68-71.HUANG Zhi,ZHAO Dong'e.Application of virtual instrument and PCIbus to optical measurement of projectilevelocity[J].Journal of Detection&Control,2010,32(1):68-71.
[4]白興滿.炮用激光測速系統的設計[D].太原:中北大學,2003.
[5]王連海,楊慧武.組合平行激光光幕靶:中國,200420007418.7[P]2004-03-17.
[6]范茂彥,張麗芳.實彈射擊自動精確報靶系統研制[J].傳感器世界,2003(11):13-15.FAN Maoyan,ZHANG Lifang.Development of precise automatic target report system in ball firing practice[J].Sensor World,2003(11):13-15.
[7]秦向軍,周漢昌.激光光幕自動報靶系統的設計與實現[J].計量與測試技術,2009,36(3):63-66.QIN Xiangjun,ZHOU Hancang.Design and realization of the automatic photoelectric target-scoring system[J].Metrology&Measurement Technique,2009,36(3):63-66.
[8]黃智偉.FPGA系統設計與實踐[M].北京:電子工業出版社,2005.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45