自動變形監測系統集成數據庫的設計與實現
2010-11-15 08:43:50貴慧宏
測繪工程 2010年1期
貴慧宏,張 錦
(太原理工大學 測繪科學與技術系,山西 太原 030024)
自動變形監測系統集成數據庫的設計與實現
貴慧宏,張 錦
(太原理工大學 測繪科學與技術系,山西 太原 030024)
指出自動變形監測系統引入集成數據庫技術的必要性。從自動變形監測系統的組成、軟件功能設計以及實現過程等方面,分析集成監測數據庫的結構,并采用E-R建模方法構建其概念模型。使用Power Designer軟件將概念模型自動轉化為物理模型并生成SQL腳本文件,滿足自動變形監測的應用需求。
變形監測;傳感器;測量機器人;ER模型
目前,測量機器人[1]、GPS等技術已經廣泛應用于變形監測領域。測量機器人的自動目標識別、自動照準、讀數等功能以及 GPS全天候、實時、無需通視的作業特點不僅降低了工作強度、提高了作業效率,還為變形監測實現自動化奠定了基礎。借助于計算機和通信技術構建實時連續的自動變形監測系統已經成為當代變形監測工作的重要內容。近年來,國內外以測量機器人和 GPS技術為基礎,對變形監測的自動化實現相繼展開研究,并取得了一定成果。國內的主要有武漢大學測繪學院的 Geo_ADMOS、解放軍信息工程大學測繪學院的ADM S自動變形監測系統[2],主要實現了測量機器人的自動測量;國外的有瑞士徠卡公司的 GeoMoS自動監測系統[3]、加拿大新布倫瑞克大學的D IMONS監測系統[4-5]等,在實現自動測量的基礎上允許接入多種類型傳感器并實現協同作業。其中,GeoMoS自動監測系統主要分為Monitor和Analyzer[6]。Monitor可連接入氣象、傾斜等多種傳感器,而且可通過TCP/IP方式獲取 Spider參考站軟件[7]的 GPS自動解算成果,并將監測成果存入服務器;而Analyzer可以通過訪問服務器中的數據庫來實現監測數據的查詢和分析。
隨著監測技術的發展,傳感器類型的增多、監測區域和監測領域的擴大必將成為監測系統發展的主要趨勢。隨之產生的就是數據類別增多和數據量增大問題;舊有的以文件方式管理數據的方法必然會嚴重影響監測系統的作業效率。而數據庫技術以其數據結構化、獨立性高、共享性高、冗余度低等特點能夠很好地解決這一問題。此外,結合變形區域的現有數據(如遙感影像、常規測量成果等)綜合分析監測數據以獲取監測對象的變形量及其誘因也是變形監測的重要內容。要實現這一目標就必須正確高效地使用和管理多源數據,這也需要數據庫技術的支持。由此可見,系統數據庫設計是監測系統構建的必要環節。本文通過對自動變形監測系統的組成、軟件功能設計以及實現過程中需關注問題的分析,完成了自動變形監測系統數據庫的設計和實現,并在運行中取得了良好的效果。
1 系統組成
變形監測的主要內容是對變形體的關鍵部位或重要構筑物,進行反復周期性觀測獲取其變形量。而自動變形監測指利用監測中心端的監測軟件通過指定的通訊方式向傳感器發送觀測指令,傳感器完成作業后以相同方式將獲取的數據傳送回監測中心,由監測軟件存入數據庫并完成解算。因此,可以將自動變形監測系統分為傳感器、通訊鏈路和軟件系統三部分(見圖1)。軟件系統與傳感器之間的通訊鏈路由電纜、Modem、LAN、WAN、GSM 或無線電等方式建立[8]。本文中將系統中具有協作關系的傳感器以節點方式綁定,方便傳感器管理和監測數據解算分析。下面以圖1中的節點1和節點2為例,描述節點內傳感器的協作過程。
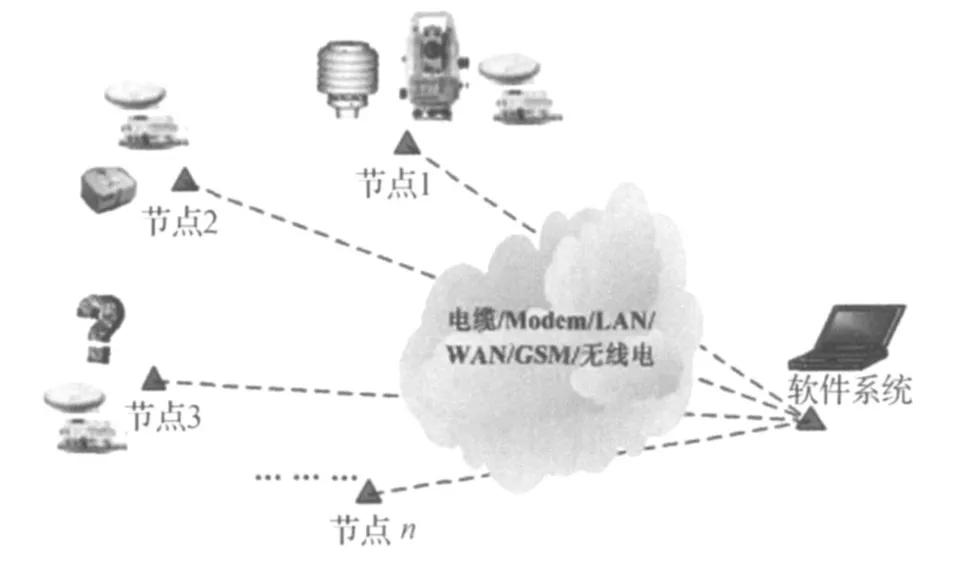
圖1 自動變形監測系統結構圖
1)節點1(測量機器人、GPS和氣象傳感器):測量機器人、GPS和氣象傳感器協同作業是變形監測中最常見的作業模式。在這一模式下,系統結構主要由基準點、測站點和目標監測點組成。基準點提供變形監測基準,監測測站點和后視點的位置變化;測站點用于安置測量機器人,目標點則安裝監測棱鏡。GPS可布設于測站點或基準點,而氣象傳感器則可以具體情況安裝在變形區域內,一般安置于測站點或基準點。通過定期在測站點安置 GPS或設置偏心觀測站,可更新測量機器人測站點位置。該模式下目標棱鏡點的空間位置可由 GPS獲取的最新測站坐標、測量機器人獲取的角度距離以及氣象傳感器獲取的溫度氣壓等綜合解算求得。
2)節點2(GPS和傾斜傳感器):傾斜傳感器、位移傳感器等傳感器僅能獲取變形的相對量,而 GPS可以獲取目標點的絕對位置。因此,通過協作就能夠獲取目標點的絕對變形量,適用于一些構筑物的監測,如橋梁、高層建筑等。
通過對節點1與節點2的描述可知,不同類型傳感器(Sensors)所作用的目標監測點(Targets)數各不相同,如測量機器人的目標監測點可根據監測需求增減,而傾斜傳感器只能作用于單個目標監測點。而節點(Nodes)是由相互間存在協作關系的傳感器通過綁定(Node Item s)構成。因此,目標監測點的解算方法(ResultExs)由作用于它的傳感器所在節點的類型(NodeTypes)決定。至于傳感器的通訊方式及其設置參數(ComuParam s)可作為屬性保存。具體E-R模型如圖2所示。

圖2 ER模型(略去實體的屬性對象)
2 系統軟件功能設計
實現變形監測過程的實時、連續、高效和自動化是自動變形監測系統的總體目標。因此,作為系統重要組成部分的監測軟件,首先,必須能夠連接各類傳感器并接收、存儲其監測數據。
GPS作為自動變形監測的主要手段,要實現實時自動化作業,軟件系統就必須具備自動接收和解算 GPS數據的能力;而 GPS數據的自動接收和解算主要包括通信鏈路的創建與管理、數據的格式轉換與存儲、數據預處理、基線解算、平差計算和坐標系統轉換等,比較復雜。因此,系統只存儲 GPS自動解算軟件處理后的目標監測點的空間坐標。而其他測量傳感器的數據格式相對簡單,由系統直接處理和存儲。下面簡要介紹幾種常用測量傳感器的數據類型。測縫計是一種用來測量變形體表面、內部裂縫開合度的傳感器,主要獲取裂縫的水平張開位移、水平錯動位移和垂直錯動位移[9];位移傳感器,又稱為線性傳感器,用于測定目標點的空間位置變化量,其數據類型為橫向、縱向和高程方向上的位置變化量;傾角傳感器,顧名思議,是用于測量相對于水平面的傾角變化量的,其數據類型為角度。而氣象傳感器作為測量機器人的輔助傳感器,測量的物理量為氣壓、溫度、濕度等,用于計算氣象改正參數,以提高測量機器人的觀測精度。
測量機器人作為自動變形監測系統的關鍵技術,其作業流程如圖3所示。新建測站點、基準點和目標點,并通過創建點組的方式對其進行組織管理;初始化全站儀,主要包括設置計算機與儀器之間的通訊參數,如通訊接口、波特率、奇偶校驗等;為各點組新建測量周期,包括自動測量的起止時間、測量頻率等,并設置限差;執行自動測量,主要指測量機器人自動觀測,并判斷觀測結果是否超限的過程;最后,對未超限的觀測結果進行存儲和解算及預警預報。

圖3 測量機器人自動作業流程
綜上所述,自動變形監測軟件可以分為系統初始化、點與點組創建、傳感器管理、自動測量和數據模型解算5個功能模塊。
1)系統初始化:主要包括限差和系統參數(Database Info)設置,如氣壓、溫度、角度和距離單位等。限差包括測量限差(M easureLim its)和預警限差(A larm Limits)。測量限差指對測量機器人測量成果的檢校,如2C互差、指標差等;預警限差用于確定變形量多大時發送警報。
2)點與點組創建:在該模塊中既可直接通過輸入空間坐標定義點(Targets),也可以利用測量機器人學習返回的坐標創建點。而點組(TargetCollections)的主要功能是組織點,方便測量機器人測量周期的設置。根據點組類型(Collection Type)的不同,點組在自動測量過程中優先級也不同。當不同類型點組的觀測周期沖突時,級別高的點組優先測量。
3)傳感器管理:包括傳感器(測量機器人 -TPSSenso rs,其他傳感器-OtherSenso rs)的通訊方式和參數設置、節點的創建及其與傳感器的綁定。此外,還應包括為各傳感器指定空間位置點。
4)自動測量:為各傳感器自動作業設置周期(Cycles),主要包括起止時間和觀測間隔。針對測量機器人還包括單/雙面觀測、觀測次序(順/逆時鐘或自定義順序)、測量方法(極坐標或方向觀測法)等方面的設置。
5)數據模型解算:指將傳感器的直接測量結果按照指定的解算方法(ResultExs)計算出最終成果(Results)。這里需要強調的是,在本系統數據庫中GPS直接保存其空間坐標不涉及原始觀測數據;測量機器人的直接觀測結果則單獨存儲在一個表中(TPSM easurements)。而其他傳感器的直接觀測數據都保存于表OtherObservations中,在數據分析解算時系統按照記錄類別(Senso r_Type)字段辨別。
此外,自動變形監測系統中要求記錄自動測量過程中所有操作(Actions)和反饋信息(Feedbacks)。系統為每個測量機器人目標點賦予4種坐標(Locations),分別為當前坐標、基準坐標、掃描坐標和參考坐標,并設定其更新規則,以便準確識別目標點。從變形分析的角度,為了便于用戶查看變形體某一方向的偏移量,設置剖面(Profiles),剖面的角度即用戶所關心的變形方向,如大壩監測中的壩體走向等。
綜上所述,設計了圖4的支持自動變形監測系統的數據庫結構,并采用 E-R模型列出了主要實體和關系。

圖4 ER模型(略去實體的屬性對象)
3 系統數據庫實現及應用
在系統數據庫概念模式的設計過程中,遵照關系數據庫的規范化理論,保證大部分的表格的設計達到3NF標準,盡量減少數據的冗余和確保數據的一致性;同時也從數據庫的實用方面考慮,允許部分數據表存在冗余。在概念模式完成后,使用Powersoft公司的S-DESIGNER12作為開發工具,將概念模式自動轉化為物理模式,并生成SQL腳本文件;在SQL Server數據庫查詢分析器中運行該文件,實現自動變形監測數據庫的創建。SQL腳本文件中創建坐標(Locations)表的代碼如下:


通過上述方式,在數據庫中總共生成了25個分別用于存儲工程、測量傳感器觀測、通訊、自動作業的基本參數表,觀測和解算結果及預警數據等信息;此外,創建了目標點坐標、測量成果和解算成果3個視圖以提高數據查詢分析效率。基于該數據庫,研發了實時自動化監測和預警系統(見圖5),實現了監測數據的自動采集、解算、分析和預警預報,目前,已完成在露天礦區沉降監測應用中的測試,取得較好效果。借助于數據庫技術,該系統不僅保證了數據的安全性和高效管理,同時也為數據共享和集成分析提供了基礎。圖6、圖7分別為項目數據的成果導出和圖表分析模塊。

圖5 實時自動化監測和預警系統

4 結束語
不斷增長的需求和監測技術的發展使得構建集成監測數據庫和基于集成監測數據庫的自動化監測系統勢在必行。本文所設計的集成監測數據庫模型具備支持連續、實時和兼容多種監測傳感器等的自動變形監測系統,在實現過程中采用了S-DESIGNER12數據庫設計軟件,最大程度保證了數據庫結構的可用性。該數據庫模型已應用于自主開發的變形監測軟件,在監測工作過程中取得了良好效果,對自動變形監測系統軟件的研制具有一定的參考價值。
[1]張正祿.測量機器人介紹[J].測繪通報,2001(5):17.
[2]徠卡自動全站儀監測應用專輯[Z].徠卡測量系統有限公司(香港),2001.
[3]袁成忠.智能型全站儀自動測量系統集成技術研究[D].成都:西南交通大學,2007.
[4]JAM ESLU TES,ADAM CHRZANOWSKI,GEOFFREY BASTIN,et al.Dimons software fo r automatic data collection and automatic defo rmation analysis[A].The 10th FIG International Symposium on Deformation Measurements[C],2001,101-109.
[5]RICK W IL KINS,GEOFFREY BASTIN,ADAM CHRZANOWSKI.A lert:a fully automated disp lacement monitoring system[CD].Calgary:the CAM I 2003 Conference,2003.9.
[6]GeoMoS幫助文檔[Z].徠卡測量系統有限公司,2007.
[7]J.VAN CRANENBROECK,L.TROYER.Leica GPS Spider for Deformation Monitoring[OL].http://www.leica-geosystem s.com.
[8]KARL SIPPEL.Modern monitoring system software development[A].The 10th FIG International Symposium on Defo rmation Measurements[C].2001:88-100.
[9]方緒順,霍家平.整體式 TS型三向測縫計構造及精度分析[J].水電自動化與大壩監測,2008,32(4):48-51.
Design and implementation of integrated datebase in automatic deformation monitoring system
GU IHui-hong,ZHANG Jin
(Surveying Science and Technology Department,Taiyuan University of Technology,Taiyuan 030024,China)
Point out the necessity of adop ting integrated database technology in the automatic deformation monitoring system.Based on the system’sarchitecture and the design and realizing p rocessof software,analyze the database’s structure of automatic defo rmation monito ring system and build its concep tual model w ith ER(Entity-Relationship)modeling method.Then translate themodel to physical datamodel and generate an SQL scrip t file by using Pow er Desigher software to meet the app lication requirementsof automatic defo rmation monito ring.
deformation monitoring;sensor;georobot;ER model
P208
A
1006-7949(2010)01-0053-05
2009-02-05
山西省自然科學基金自主項目資助(2007011052)
貴慧宏(1984-),男,碩士研究生.
[責任編輯劉文霞]
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
財經(2017年2期)2017-03-10 14:35:35
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
財經(2016年15期)2016-06-03 07:38:02
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
