基于空心杯電機的SPWM與SVPWM研究*
2010-11-21 07:59:16董大為
電機與控制應用 2010年4期
董大為,楊 墨
(上海大學機電工程與自動化學院,上海 200072)
0 引言
在交流電機調速系統中,通過采用合適的脈寬調制(PWM),一方面可以使電機對給定的控制信號作出準確快速的響應,另一方面可以減小電機的轉矩脈動,提高電機的運行穩定性,并且拓寬電機的調速比[1]。目前常用的調制模式有正弦脈寬調制(SPWM)和空間矢量脈寬調制(SVPWM)兩種。
空心杯電機從結構上可以分為有刷和無刷兩類。有刷空心杯電機轉子無鐵心;而無刷空心杯電機,定子采用定子無齒槽結構,這種特殊結構近乎消除齒槽轉矩,使轉矩脈動大為減小。空心杯電機在高精度、寬調速范圍伺服驅動中得到越來越廣泛的應用,作為高效率能量轉換裝置,代表了電動機的發展方向之一[2]。本文所采用的無刷空心杯電機從外特性上來看,可以等效為永磁同步電動機,而其等效的交直軸電感要遠小于常規的永磁電動機。
本文通過理論及試驗條件分析,基于英飛凌XC164CM單片機,建立軟、硬件試驗平臺,通過他控式變頻調速系統對兩種調制的性能進行比較。
1 SPWM與SVPWM原理比較
一般PWM是將調制波與載波的波形進行比較,從而得到等高而不等寬的脈沖序列。SPWM方式是使脈沖的寬度按照正弦規律變化,從而在效果上和正弦波等效,故要以正弦波為調制波。其原理圖如圖1所示。
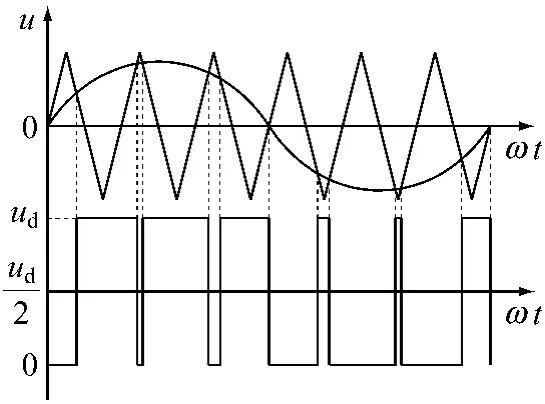
圖1 SPWM生成原理
在數字系統中,一般按照規則采樣法的原則來實現,如圖2所示。

圖2 規則采樣法原理
設三角載波Uz的幅值為1,正弦波調制信號為:

則可由圖2中相似三角形得到:

可得取樣時刻SPWM的脈沖寬度為:

式中:M——調制深度;
U——調制波的幅值。

當M>1時,比較器的輸出處于飽和狀態,此時,輸出的基波分量幅值就不與調制函數(4)的值成比例關系,從而造成波形發生畸變,諧波成分增加。因此,當調制深度為1時,在星形連接的繞組中,相電壓us可以達到最大值,為直流母線電壓的一半Udc/2。
定義線性調制比為:

易見,在SPWM模式下,最大線性調制比為1。
SVPWM的基本思想,是通過8組三相電壓式逆變橋的基本電壓矢量(000、001、010、011、100、101、110、111,其中 0 表示上橋臂關斷,1 表示上橋臂導通)在靜止α-β坐標系中來合成定子相電壓矢量us。
將8組基本矢量按照開關管動作最小的順序進行排列,其中u1~u6表示基本矢量,其模長為Udc2/3。u0、u7分別表示000 與111,為零矢量,相當于電機的輸入端短路,則其基本矢量關系如圖3所示。

圖3 SVPWM基本矢量關系
以圖3中的定子電壓矢量位置為例,根據伏秒原則,可有:

其中 T0、T2、T3、T 分別表示 u0、u2、u3、u 的作用時間。
將伏秒的乘積向β軸投影,可得:

進而可得:

同理可得:

隱含條件:

將式(7)、(8)代入式(9)、(10)可得:
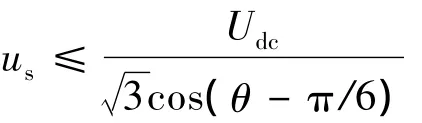
其中2π/3≤θ≤π,則在該取值范圍內,us可以取到的最大值為由對稱性,該結論可以推廣到其余五個區間。由該結論可知:
(1)定子相電壓可以達到的區域為該六組基本矢量所構成的六邊形的內切圓,如圖4所示;

圖4 定子相電壓區域圖
(3)按照式(5)的定義,與SPWM相比,SVPWM模式下的最大線性調制比大于1,相當于拓寬了其線性調制范圍。
2 試驗平臺建立
2.1 試驗條件分析
為了能夠準確地比較兩種調制波的性能,試驗必須在僅由單一要素影響的情況下進行,即要創造條件,使影響電機轉矩性能的因素只有調制模式。
盡管目前對于交流同步電機的控制有FOC、DTC等諸多控制算法,但在試驗中,由于各種算法所依托的調制模式不同,以及算法本身對電機的影響不同。因此,如果采取特定的算法,會使得試驗失準。該試驗采用他控式開環變頻調速系統來進行驗證。
同步電動機中,轉子轉速n(r/min)與定子電流的頻率f嚴格按照:

式中:p——電機極對數。
在他控系統中,轉子的轉速完全由定子頻率決定。由電機統一理論來看[3],電機的轉矩為:

式中:k——與電機本體相關的常量:
Fs,Fr——分別為定、轉子的磁動勢;
φ——定轉子之間磁動勢的夾角。
按照功率守恒的原則,電源輸入的有功功率等于電機消耗的實際功率。因此,在相同的定子電流頻率,母線電壓,以及相同的負載轉矩的情況下,通過觀察相電流,即可觀察兩種調制方法的效果。
由永磁同步電機的電磁轉矩公式[4]:

可見電流的穩定性,也可反映出轉矩的穩定性。
2.2 硬件平臺建立
由于本文采用開環變頻調速系統,故不需要光電編碼盤及控制器的AD模塊。硬件電路在設計上主要是為了配合復雜的控制算法,包括三個部分:主電路、控制電路、隔離電路。系統基于英飛凌XC164CM建立,其基本原理如圖5所示。
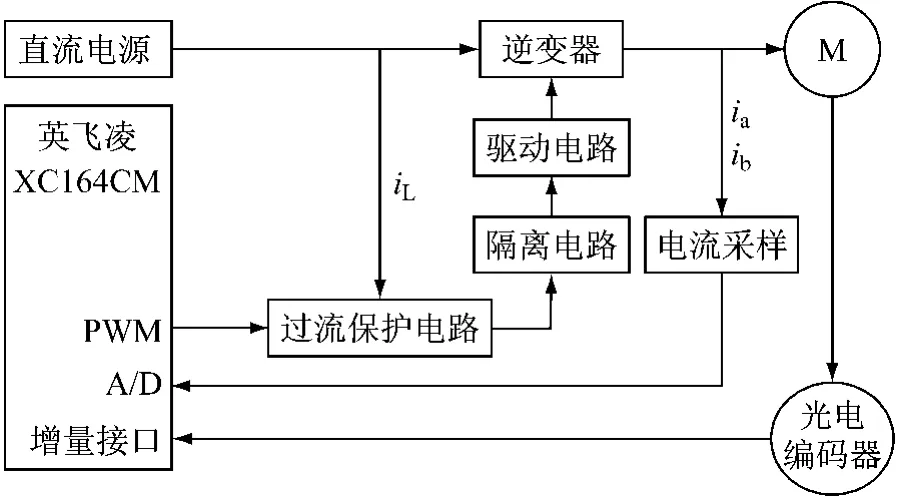
圖5 硬件電路基本框圖
為了使MOSFET的開通關斷更為迅速,本文使用IR2181作為驅動芯片,其工作電壓范圍為10~20 V,可用于工作電壓在600 V以下的N型MOSFET和絕緣柵雙極晶體管(IGBT)等功率器件,IR2181有兩路輸出可用于驅動逆變器一相電路中的上下兩個MOSFET,可輸出的最大正向峰值驅動電流為1.9 A,而反向峰值驅動電流為2.3 A,這一性能大大提高了MOSFET的開通、關斷性能。主電路原理如圖6所示。
本文使用ACS712ELCTR-05B-T電壓型霍爾電流傳感器來實現對相電流的觀測。該傳感器的輸入信號量程為-5~5 A,輸出信號以2.5 V為基準,靈敏度為185 mV/A。其原理如圖7所示。
在觀測時,可以直接對傳感器的輸出端進行觀察。
2.3 軟件平臺建立
主程序流程圖如圖8所示。
通過英飛凌定時器T12模塊來實現頻率的改變,其程序基本思路如圖9所示。
其中,T12 定時器的中斷周期為 50 μs[5],PWM的周期也為50 μs,母線電壓采用24 V。SPWM與SVPWM子程序,可以分別按照上述介紹的原理進行編寫,在此不作詳述。

圖6 主電路原理圖
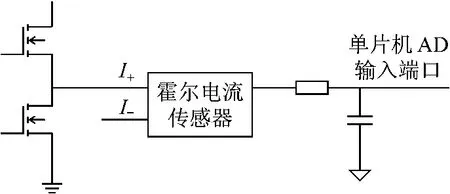
圖7 霍爾電流傳感器原理

圖8 主程序流程圖
PWM函數執行時,調制波的平滑程度取決于每次增加的角度大小。將轉子旋轉一周的位置取值越多,得到的調制函數就越平滑。本文為得到較好的調制波波形,將圓周分為2 048個位置,每一次執行PWM程序,角度增加約0.176°。
在定時中斷子函數中,上限值通過電位器調節,利用單片機自帶的AD模塊進行處理。當AD的值為0時,上限值設置為1。通過該上限值的調整,即可調整定子磁場的旋轉頻率,以實現變頻調速。

圖9 T12定時中斷流程圖
3 試驗結果及分析
單片機側輸出的PWM波,通過RC低通濾波器之后,可以發現在SVPWM原則下,隱含的調制波波形為鞍形波,如圖10所示。此時所采用的線性調制比約為1.083,即此時的us=13。
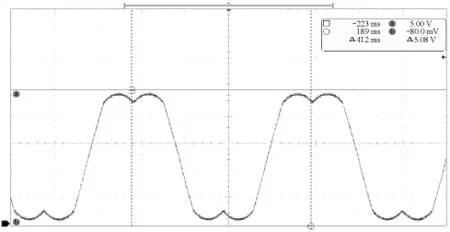
圖10 SVPWM中隱含的調制波
本文中,試驗樣機為上海埃依琪公司提供的空心杯無刷直流電機,額定電壓24 V,額定電流2 A。負載由同軸相連的一臺功率為140 W的直流電機提供,通過改變直流電機的外接電阻來改變負載。在給定轉速為146 r/min,調制深度為0.5的條件下,分別通過電流傳感器對相電流進行觀測,圖11為SPWM控制下的A相電流波形,圖12為SVPWM控制下的A相電流波形。
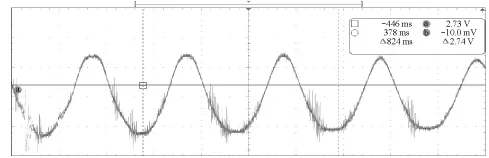
圖11 SPWM控制下的相電流波形
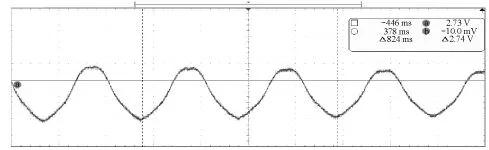
圖12 SVPWM控制下的相電流波形
由圖可見,SPWM控制下的相電流采樣,幅值要大于1 V,而SVPWM控制下的相電流采樣,幅值在1 V以內。SPWM控制下的相電流波動也明顯要比SVPWM控制下的相電流波動要大。進而說明,在SVPWM模式下,電機的運行要比SPWM模式穩定,同時電源利用率要高。
本試驗中使用WYJ-S 30V/3A的穩壓電源。在給定24 V的電源后,在負載和轉速保持不變的前提下,通過改變SVPWM中的線性調制比r,可改變定子電流,如表1所示。
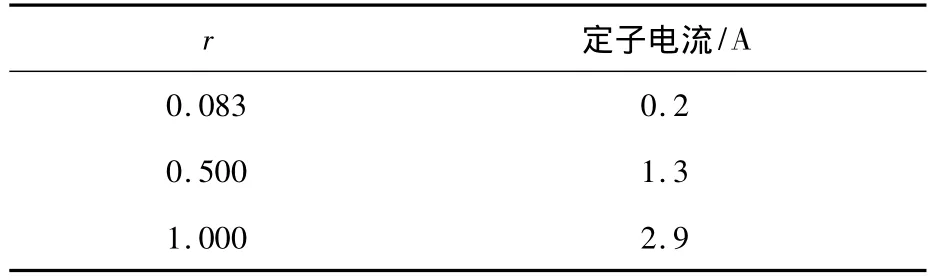
表1
根據式(13),定子電流可達到的最大值越大,電機的電磁轉矩可達到的最大值也越大。因此線性調制比越大,電機出力越大。
4 結語
本文在他控變頻調速系統中,分別由SVPWM與SPWM來進行空心杯電機的試驗,通過對試驗結果的分析可得出以下結論:
(1)SVPWM較SPWM對電壓的利用率高,一方面表現在其過調制能力上,還表現在當調制深度相同時,SVPWM控制下,相電流的有效值要更小;
(2)從相電流波形的波動來看,SVPWM較SPWM可以更好地抑制轉矩脈動;
(3)在給定電壓幅值不變的情況下,在穩態條件下,影響相電流幅值的量即為線性調制比,調制比越大,相電流的幅值越大,電機的出力也越大。
[1]陳國呈.新型電力電子變換技術[M].北京:中國電力出版社,2004.
[2]李志民,張遇杰.同步電動機調速系統[M].北京:機械工業出版社,2001.
[3]唐任遠.現代永磁電機理論與設計[M].北京:機械工業出版社,2008.
[4]吳志紅,朱元,王光宇.英飛凌 16位單片機XC164CS的原理與基礎應用[M].上海:同濟大學出版社,2006.