基于三目視覺測量的航天器交會對接相對位姿確定算法
2010-12-15 02:48:36王惠南
宇航學報 2010年6期
錢 萍,王惠南
(南京航空航天大學航天學院,南京 210016)
0 引 言
RVD測量技術是空間交會對接中一項十分重要的關鍵技術[1]。目前國內外研究的主要方法有GPS導航、微波雷達、紅外跟蹤、以及以CCD相機為光學成像敏感器的計算機視覺測量方法等。采用CCD光學成像方法來實現兩航天器(目標器、追蹤器)間相對位姿參數的測量,即在追蹤器上安裝CCD相機,在目標航天器上安裝幾何形狀及尺寸已知的特征點,通過對特征點在CCD上成像的分析和計算就可以確定兩航天器的相對位置和姿態[2]。國內外學者對這方面已經做了大量研究[3-4],其中最傳統的方法是利用單CCD進行測量。然而,由于這種算法的基本方程為二次非線性方程,無直接解析解,需迭代求數值解,因此迭代求解的收斂性和速度將極大影響測量的實時性和準確性[5]。所以近年來人們提出雙目視覺的測量方法,其基本方程為線性方程,存在解析解,所以計算過程簡單,測量精度高,故理論上該模型優于單攝像機的模型。但雙目視覺測量在工程應用中存在一個重要技術難點,即圖像的匹配問題。有研究表明,在攝像機標定的情況下,特征像點的定位匹配誤差是引起位置測量誤差的主要原因。而兩航天器的相對姿態是通過特征點的空間位置來確定的,因此姿態誤差最終也歸咎于特征像點的定位匹配誤差[5]。為解決上述問題,本文提出利用三目視覺的方法來測量兩航天器間的相對位姿參數,既避免了單目測量中需要迭代求解二次非線性方程的實時性、準確性及收斂性問題,又有效地減小了雙目測量中因圖像匹配而帶來的定位誤差與姿態誤差。除此之外,三目測量亦是一種冗余度技術,使測量系統更加安全可靠,這在航天技術應用中自然是一個首要問題。
1 三目視覺相對位姿確定算法
1.1 四種坐標系的定義
為了便于闡述和分析,建立追蹤器坐標系O(X,Y,Z)、攝像機坐標系Oc(Xc,Yc,Zc)、像墻面坐標系Oo(u,v)和目標航天器坐標系o(x,y,z),分別定義如下:
(1)圖像坐標系Oo(u,v):是以像素為單位表示的圖像坐標系,原點Oo位于圖像的一個頂點,(u,v)表示每一像素在圖像中的列數和行數,圖像中心點O1的圖像坐標為(uo,vo);
(2)攝像機坐標系Oc(Xc,Yc,Zc):原點Oc定義為攝像機光心,Xc軸和Yc軸分別與圖像的u軸和v軸平行,Zc軸為攝像機的光軸,它與圖像平面垂直。光軸與圖像平面的交點,即為圖像平面的中心點 O1。|OcO1|即為攝像機焦距 f。
(3)追蹤器坐標系O(X,Y,Z):該坐標系定義在追蹤器上,其原點定義在追蹤器質心,其X軸、Y軸、Z軸可根據追蹤器的形狀來規定,攝像機坐標系Oc與追蹤器坐標系固聯。
(4)目標器坐標系o(x,y,z):該坐標系定義在目標特征光點上,其x,y,z軸可根據具體特征光點的設置而定,本文中參見圖1.四個特征點A、B、C、D構成正方形,故將原點o定義為正方形中心,x軸系。各坐標系見圖1。
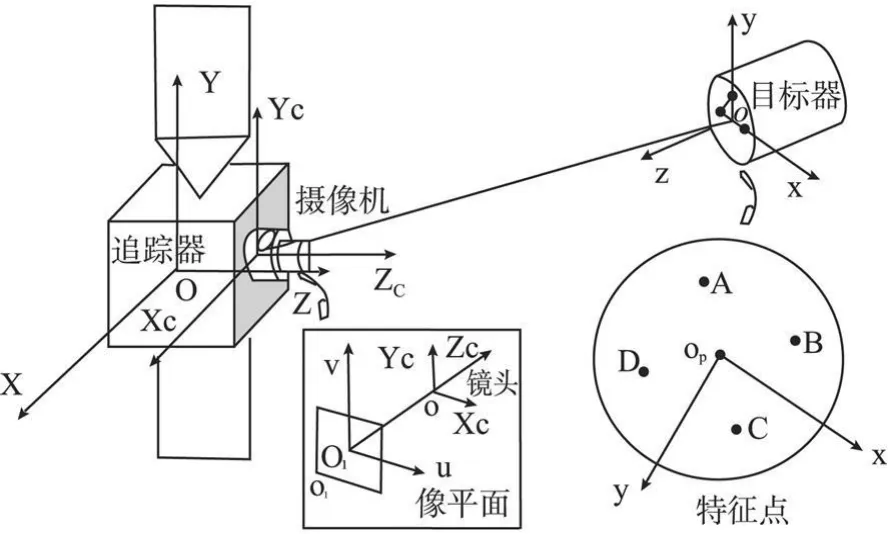
圖1 各坐標系的定義及特征點的設置Fig.1 Definition of the four coordinate systems and configura-tion of reference points
1.2 三目視覺測量原理
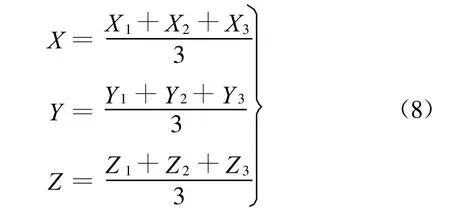
利用 C1,C2,C3三臺攝像機成像平面上投影點。若沒有任何誤差存在,圖示三條直線 Oc1P1,Oc2P2,Oc3P3應交于空間同一點(即P點)。但實際上,由于攝像機標定誤差,特征像點的定位匹配誤差等,使得這三條直線交于空間三點,即P1,P2和P3,它們分別為直線Oc1P1,Oc2P2和Oc3P3的兩兩交點,其坐標值可以由雙目視覺的特征點定位算法給出。
三目視覺測量原理見圖2。
假設P點在追蹤器下坐標為P(X,Y,Z),則其估計值應滿足目標函數

由上式確定的P點坐標即可認為是P點真實坐標的最優估計。具體過程如下:

圖2 三目視覺定位原理Fig.2 Trinocular vision positioning
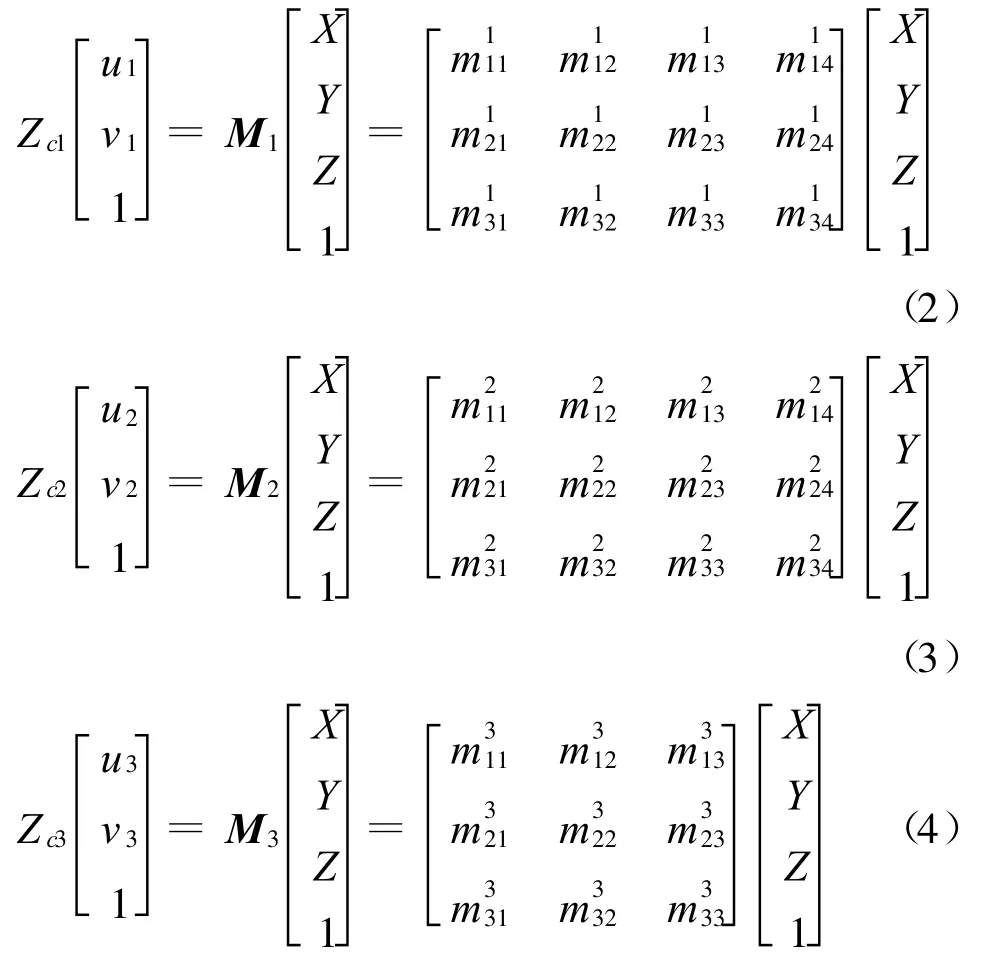
式(2)(3)(4)中 (ui,vi,1,i=1,2,3分別為點 P′1,P′2和 P′3在各自圖像坐標系中的齊次坐標,(X,Y,Z,1)為點P在追蹤器坐標系下的齊次坐標。設點P1,P2,P3在追蹤器坐標系下的坐標分別為Pi(Xi,Yi,Zi),i=1,2,3。由雙目視覺定位算法[7]可以得到該坐標的最小二乘結果為:


式(5)中P點在追蹤系坐標系中的坐標為(X,Y,Z),則其估計值應滿足目標函數

要滿足式(6)只需同時滿足下列條件:

由各變量與算術平均數的離差平方和最小,可知最優的X,Y,Z值為
上式即為P點在追蹤器坐標系下的坐標值P(X,Y,Z)的最優估計。
與單目視覺算法相比較,利用三目視覺定位,每個特征點都可以得到其唯一確定的位置坐標,由于求解的都是線性方程,存在解析解,故無需迭代求解。與雙目視覺測量算法相比,三目視覺算法也有明顯的優勢。一方面,通過方差處理,提高了特征點的定位精度。另一方面,有研究表明,利用三目視覺的方法從圖像中提取特征點并通過圖像匹配來獲得這些特征點的空間坐標的方法,可以大大減少匹配的時間以及誤匹配的可能性[8]。除此之外,三目測量亦是一種冗余度技術的應用,三臺攝像機互為備份,當有一臺出現故障后,另兩臺可利用雙目算法繼續完成測量任務,增加了測量系統安全可靠性,這在航天技術應用中也是至關重要的。綜上所述,三目視覺測量方法要優于單、雙目測量。
1.3 相對位置和相對姿態的計算
通過上述方法求得各特征點在追蹤器坐標系中的位置坐標后,我們就可以通過坐標轉換進一步求得追蹤航天器和目標航天器之間的相對位置和相對姿態。
如圖1所示,目標航天器上設置的4個特征光點A,B,C,D位于同一平面中并構成正方形,可得目標中心位置Op(Xop,Yop,Zop)為[7]

目標的姿態以歐拉角 φx,φy,φz表示,它們分別表示目標器坐標系與追蹤器坐標系三個軸之間的相對旋轉角[7],即

式(10)中L=|AB|為正方形的邊長。
2 基于三目光學測量的建模與誤差分析
2.1 運動參數簡化模型
為了更清楚地了解上述過程的物理意義,同時便于誤差分析和簡化計算,下面我們討論在一種簡單的攝像機配置下的空間點重建,如圖3所示。
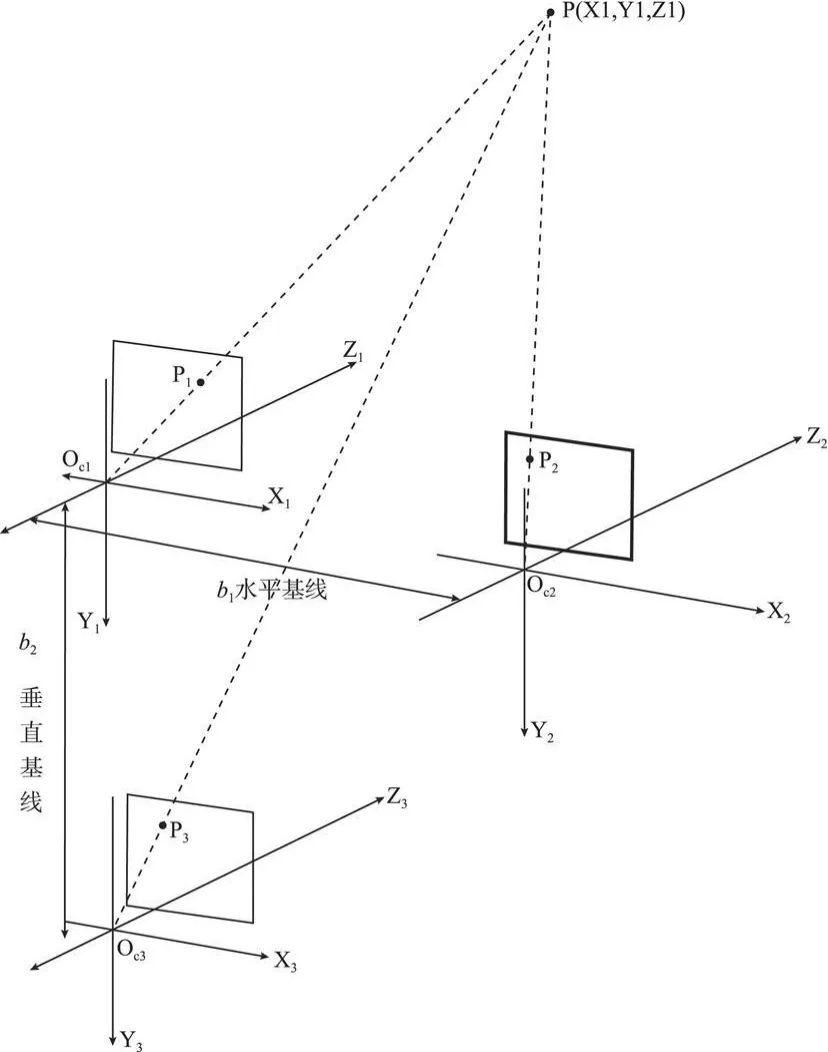
圖3 三攝像機的簡單配置Fig.3 A simple configuration of the three cameras
有3臺CCD攝像機C1,C2和C3,對空間點P同時進行觀測,并假設:
(1)焦距f相等,內外參數已標定且均相等。
(2)三攝像機光軸互相平行,C1,C2的X軸互相重合,C2,C3的Y軸互相重合。
(3)攝像機C1和C2間距為b1(稱為水平基線horizontal baseline長度),C2和C3之間間距為b2(稱為垂直基線vertical baseline長度),即C1沿X軸右移距離b1后與C2重合,C2沿Y軸下移距離b2后與C3重合。
(4)P1,P2,P3三個像點已精確匹配,對應空間同一點P。
所以,若特征點P點在攝像機C1坐標系中的坐標值為(X1,Y1,Z1),則其在C2坐標系的坐標值即為(X 1-b1,Y1,Z 1),在 C3坐標系的坐標值即為(X1,Y1-b2,Z1)。
說明:由于攝像機是固定在追蹤器上,攝像機坐標系和追蹤器坐標系之間的相對位置和姿態在運動過程中是保持不變的,所以為了方便,我們僅需考慮目標器坐標系與攝像機坐標系之間的相對位置及姿態的測量。
在上述約束條件下,由針孔模型[6]的比例關系可得:

式(11)至(16)中,uo,vo,αx,αy為攝像機內部參數,uo,vo為圖像中心點在像平面坐標系中的坐標,αx=f/d x,αy=f/d y,這里 f是攝像機焦距,d x,d y為每一個像素在u軸和v軸方向上的實際物理尺寸。(u1,v1),(u2,v2)和(u3,v 3)分別為點 P1,P2,P3的圖像坐標。
下面由方程(11)~(16)來求解(X1,Y1,Z1)。顯然,理論上有:u1=u3,v 1=v2由方程(11)/(13)得

同理有

或表示為

式(17)至(20)中,u1-u2稱為水平視差(horizontal disparity),v1-v3稱為垂直視差(vertical disparity),視差是由于攝像機位置不同使同一點P在圖像中的投影點不同引起的。由式(19)或(20)可知,P點距離越遠(即Z1越大),視差越小。當 P點趨于無窮遠時,Oc1P1,Oc2P2與Oc3P3趨于平行,視差趨于0。
2.2 針對簡化模型的誤差分析
針對式(17)至(20)建立的測量模型,對其進行誤差分析。首先分析X方向,由于

所以:

所以有:
同理分析Y方向,由于

所以:

同理分析Z方向,由于

所以:

式(21)至(29)中,d u1,d u2,d u3,d v1,d v2,d v3分別為特征點在三個攝像機相平面上的像點的匹配誤差,由于d u1,d u2,d u3,d v1,d v2,d v3是統計獨立的,可設d u1=d u2=d u3=d v1=d v2=d v3,即D(u1)=D(u2)=D(u3)=D(v1)=D(v2)=D(v3)=D(u),對上面各式兩邊分別取方差,則X方向的定位誤差為:
Y方向的定位誤差為:
Z方向的定位誤差為:

由此對式(9)兩邊取方差得到兩航天器間相對位置的誤差[5]為:
同理對式(10)取方差得到兩航天器間相對姿態的誤差[5]為:

3 仿真結果及比較分析
為驗證本文所提出的三目視覺測量算法的有效性,利用Matlab進行數值仿真。仿真條件如下:
攝像機焦距f=1,即采用歸一化的圖像坐標;
圖像分辨率4000*3000;
每像素物理尺寸:12μm×12μm;
特征點匹配誤差:0~5像素;
三臺攝像機相對位置:b1=0.4 m,b2=1 m;
四個特征點構成的正方形邊長:L=2m假設某特征點在追蹤系中精確位置為X=-1,Y=1,Z=100,匹配誤差在0~5像素之間變化,分別利用雙目和三目視覺算法確定該點在追蹤系下的坐標值,分別得其X,Y,Z三個方向定位的誤差結果見圖4。
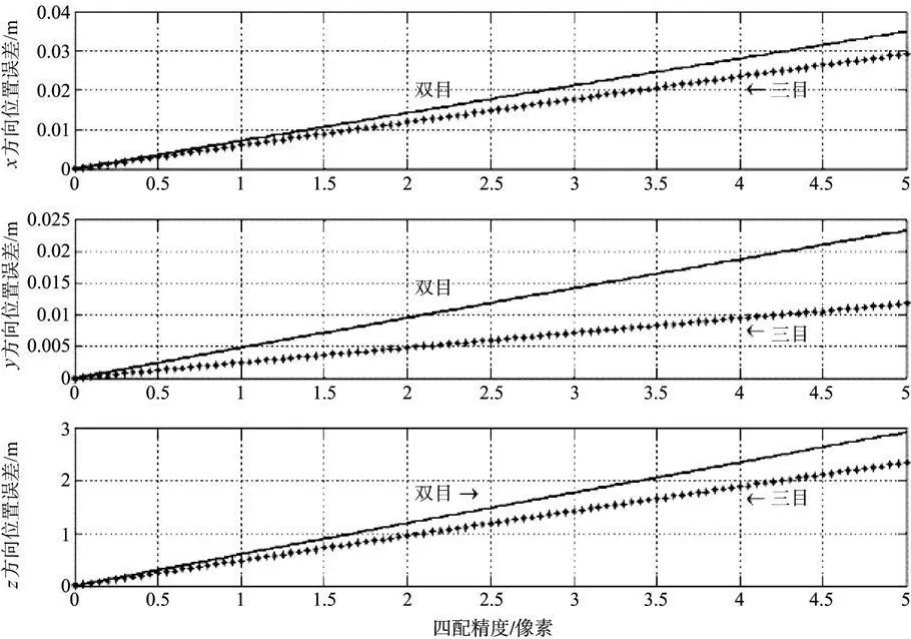
圖4 空間點定位誤差與匹配精度的關系曲線Fig.4 Relation curve between positioning deviation of a reference point and its matching error
由圖4我們可以看到,在特征像點匹配誤差相同的情況下,通過三臺攝像機觀測得到的每個特征點的定位誤差均比雙目視覺算法的誤差小。并且通過計算得知,在該位置上X,Y,Z方向的誤差分別減小了16.37%,66.47%,19.76%。經大量數據仿真發現,對于空間其他位置上的特征點的定位也有相同結論,故不再列出類似圖形曲線。所以,我們可以得出結論:與雙目視覺測量方法相比,三目視覺測量可以有效減小特征點的定位誤差,尤其是在Y方向上定位精度顯著提高。這一結論具有一般普遍性,可以從以下兩方面加以解釋。直觀上,通過比較三目(即圖3)與雙目攝像機配置圖[7]可以發現,三目配置實際是在雙目的基礎上在Y方向上增加一臺攝像機;理論上,通過比較式(17)至(19)與雙目視覺的定位方程[5]可見,Y方向的定位算法有了較大改進,而X,Z方向的仍然相似。即在X、Z方向的定位上,算法沒有變化,僅僅是由于增加了一個冗余CCD后求平均使得精度有所提高。而對于Y方向,算法有了改進。雙目視覺的定位方程中,u1,u2,v 1三個測量量都會引入誤差,而三目視覺中Y的誤差來源僅有v1和v3兩項。由于在2.2節中已假定每個測量量引入的誤差相同,所以三目視覺算法在Y方向上的定位精度提高幅度大于X和Z方向。
4 結 論
本文主要針對航天器交會對接過程中目標航天器與追蹤航天器間的相對位置和姿態的測量問題,采用CCD攝像機作為傳感器的光學方法,獲得了較好的結果。文章在總結了單雙目測量方法優缺點的基礎之上,提出了三目視覺的測量方法,闡述了其基本原理,建立了數學模型,并對測量系統中的誤差進行了分析。文章最后通過Matlab仿真,對三目視覺的定位誤差與雙目視覺做了定量的比較。仿真結果表明三目視覺的測量方法有效。與單目視覺測量相比,三目視覺算法無需迭代求解非線性方程,因而具有很好的實時性和更高的測量精度;而與雙目視覺相比,三目視覺能很好地克服圖像匹配帶來的誤差,提高特征點的定位精度,因此能為航天器的相對位姿參數提供更為精準地數據。除此之外,三目測量亦是一項冗余度技術,使得測量系統更具安全可靠性。因此,該方法對航天器在軌實時應用具有重要參考價值。
[1] 吳宏鑫,胡海霞,解永春,等.自主交會對接若干問題[J].宇航學報,2003,24(2):132-137.[WU Hong-xin,HU Hai-xia,XIE Yong-chun,et al.Several questions on autonomousrendezvous docking[J].Journal of Astronautics,2003,24(2):132-137.]
[2] 曹喜濱,張世杰.航天器交會對接位姿視覺測量迭代算法[J].哈爾濱工業大學學報,2005,37(8):691-694.[CAO Xi-bin,ZHANGShi-jie.An iterative method for vision-based relative pose parametersof RVD spacecrafts[J].Journal of Harbin In Institute of Technology,2005,37(8):691-694.]
[3] HOCJ,MCDLAMROCHNH.Automatic spacecraft docking using computer vision-based guidance and control techniques[J].Journal of Guidance,Control,and Dynamics,1993,16(2):281-288.
[4] PHILIPNK,ANANTHASAYANAMMR.Relative position and attitude estimation and control schemes for the final phase of an autonomous docking mission of spacecraft[J].Acta Astronautica,2003,52:511-522.
[5] 張慶君,胡修林,葉斌,等.基于雙目視覺測量的航天器相對位置和姿態的測量方法[J].宇航學報,2008,29(1):751,851,951,61.[ZHANG Qing-jun,HU Xiu-lin,YE Bin,et al.Binocular vision-based relative position and attitude determination between spacecrafts[J].Journal of Astronautics,2008,29(1):751,851,951,61.]
[6] 馬頌德,張正友.計算機視覺—計算理論與算法基礎[M].北京:科學出版社,1997:57.[MA Song-de,ZHANG Zheng-you.Computer vision computation theory and algorithm principle[M].Beijing:Science Press,1997:57.]
[7] 張淑琴.空間交會對接測量技術及工程應用[M].北京:中國宇航出版社,2005,10:342-343.[ZHANG Shu-qin.Measurement technology of space rendezvous and docking and engineering applications[M].Beijing:China Astronautic Publishing House,2005,10:342-343.]
[8] 何炳蔚,林志航,楊明順,等.逆向工程中基于三目視覺自動提取并構造復雜曲面邊界技術[J].機器人,2002,24(1):66-70.[HE Bing-wei,LIN Zhi-hang,YANG Ming-shun,et al.In reverse engineering the method for extracting and modeling boundary of complex surface based on trinocular stereo vision[J].Robot,2002,24(1):66-70.]
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
