工程機械發動機電子節氣門控制器
2011-01-31 09:02:48寧艷梅陳正龍
微特電機 2011年6期
寧艷梅,陳正龍
(湖南三一工業職業技術學院,湖南長沙410129)
0 引 言
節氣門主要是用來控制發動機的進氣量,從而控制油氣比,達到改變發動機轉速及扭矩的目的。目前國內大部分工程機械均采用傳統的機械式節氣門,即節氣門操縱機構通過拉桿或拉索,一端連接加速踏板(油門踏板),另一端連接節氣門的連動板而工作[1]。因此節氣門的開度完全取決于加速踏板的位置,即駕駛員的操作意圖,但考慮工程機械發動機(ICE)的動力性和燃油經濟性等因素,我們知道發動機并不總是處于最佳的運行工況,而且一旦駕駛員進行了誤操作,將造成行駛安全隱患。因此,為精確控制進氣量,以獲得更佳的油氣比,使發動機處于最佳運行工況,達到改善工程機械燃油經濟性、排放性以及駕駛舒適性的目的[2],在發動機上加裝電子節氣門控制系統(以下簡稱ETCS)是十分必要的。
1 ETCS基本結構和工作原理
1.1 ETCS基本結構
雖然各個廠家生產的ETCS在結構和外觀上有一定的差異,但一般都包括節氣門控制電機、加速踏板位置傳感器、節氣門位置傳感器以及電控單元(以下簡稱ECU)四個基本的組成部分[3]。ETCS基本結構如圖1所示。
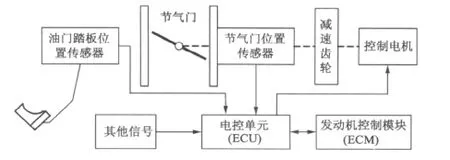
圖1 ETCS基本結構
其中油門踏板位置傳感器用來反映駕駛員的需求,它將油門踏板的下踏量及其變化速率通過線性電位器轉換成電信號輸出至ECU;節氣門位置傳感器同樣通過一個線性電位器將節氣門閥的位置信號(即節氣門的開度)轉換成兩路互補的電信號輸出至ECU;控制電機一般由步進電動機或直流伺服電動機構成,它是電子節氣門控制系統的執行機構;ECU則是整個ETCS的核心,包括信息處理模塊和驅動電路模塊,信息處理模塊一般采用高性能的單片機或DSP;驅動電路則一般采用橋式驅動電路。
1.2 ETCS工作原理
每個單片機工作循環內,ECU首先對油門踏板位置信號以及節氣門位置信號進行采樣,并對兩個信號進行比較,得到一個誤差信號,ECU將根據這個誤差信號確定節氣門開度的一個基本期望值。同時ECU將對發動機轉速、檔位等汽車運行工況信息,以及來自發動機控制模塊的信號(如ABS、TRC和VSC等信號),進行綜合分析計算,得到一個節氣門開度的最優值[4]。這個最優值將確定控制電機的工作電流以及轉動方向(是正轉還是反轉),接著ECU就發出指令,通過橋式驅動電路控制電機的轉動,從而帶動節氣門閥轉到一個最優開度位置。此時發動機也就處于最優運行工況下。整個控制系統為一個閉環控制系統,所以能保證發動機始終在最優運行工況下工作,這也就為實現降低油耗、減少排放的目標奠定了理論基礎。
2 電子節氣門控制器硬件設計
為節約成本,提高可靠性與性能,國外對電子節氣門的控制都是嵌入到了發動機的電控單元(ECU)中,也就是說整個發動機只有一個電控單元[5]。但由于受發動機技術水平的限制,目前國內大部分汽車采用的仍然是國外的發動機,這就導致發動機的電控單元變成了一個黑匣子,里面的信號及控制方式我們無從知道。針對這種情況,目前只能在發動機上加裝電子節氣門控制器。本文就是基于這樣一種情況,設計了該獨立的電子節氣門控制器。整個控制器的硬件總體結構如圖2所示。
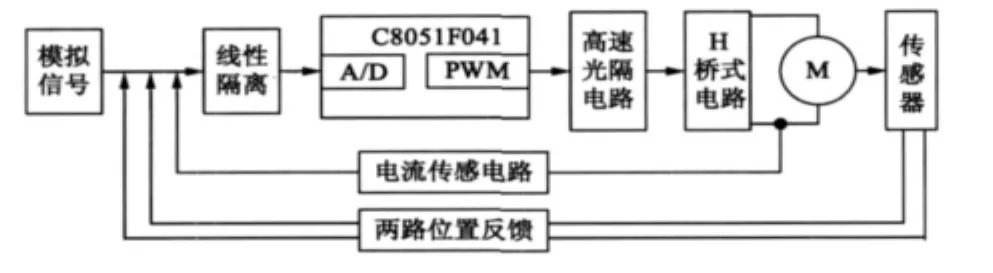
圖2 電子節氣門控制器硬件總體結構圖
如圖2所示,整個控制器的硬件結構由信號處理模塊(隔離放大)、CPU模塊、驅動電路模塊組成。如前面所說,ECU是電子節氣門控制系統的核心,其處理器一般采用高性能的單片機或DSP,綜合考慮處理器的性能及成本等因素,我們選用了Cygnal公司的C8051F041單片機作為ECU的CPU。
2.1 Cygnal單片機介紹
Cygnal單片機是美國Cygnal公司推出的一種混合信號SOC(系統級芯片)型8位單片機,具有與8051指令集完全兼容的CIP-51內核。其內核采用流水線結構,執行速度高,其片內資源豐富,具有模/數(A/D)轉換器和數/模(D/A)轉換器,并能產生用來控制電機的 PWM信號,而且片內的JTAG仿真接口和調試電路支持全速、非侵入式的在線調試[6],可以極大地縮短開發周期和節約成本。
2.2 隔離電路設計
在本文所設計的電子節氣門控制器硬件原理圖中,隔離放大電路包含模擬信號(油門踏板位置信號以及兩路反饋信號)與C8051F041之間的線性隔離放大電路以及數字信號與C8051F041之間的高速光電隔離電路。其作用是為了將模擬信號與數字信號互相隔開,從而降低兩者之間的相互干擾,從硬件方面提高系統的可靠性。單路A/D轉換線性隔離放大電路如圖3所示。HCNR200為所采用的高性能線性光耦芯片。
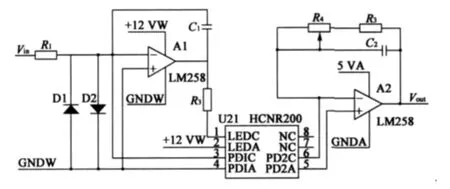
圖3 單路A/D轉換線性隔離放大電路
2.3 H橋驅動電路設計
圖4為本文所設計的H橋驅動電路的原理圖。從C8051F041的PWM口輸出的PWM信號以及電機轉動的方向信號(D1、D2)經過光電隔離以后,通過邏輯門電路7408、7406,進入全橋驅動芯片IR2110,再經H橋,控制電機的轉動方向以及轉動位置。邏輯門電路部分主要用于產生IR2110的輸入信號,并進行自鎖保護,從而保證了H橋不會發生直通現象。IR2110是美國IR公司推出的一種雙通道的高速單片式集成驅動器,用以驅動MOS管的柵極,達到控制H橋的某一側橋臂兩個MOS管的同時導通或關斷。H橋則由四個MOS管(2SK1277)組成,2SK1277自帶快速恢復二極管,具有很好的自保作用。
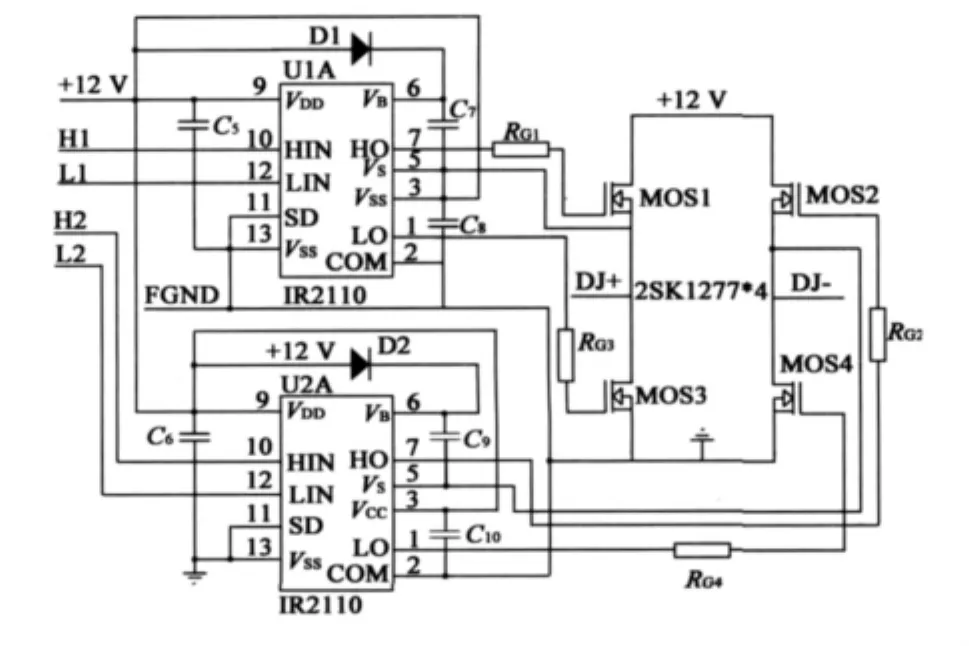
圖4 H橋驅動電路原理圖
3 軟件調試及應用
整個電子節氣門控制系統程序的開發基于Cygnal的集成開發環境IDE,主要由C語言編寫。IDE通過單片機上的JTAG仿真口對程序進行調試[7]。
系統程序采用模塊化設計,可以分為系統初始化模塊、AD采樣模塊、PID算法模塊、PWM輸出模塊,其主程序流程圖如圖5所示。由定時器定時產生的中斷保證系統程序的循環運行。在采樣模塊中,我們對反饋信號(Fp、Fn)進行了采樣,并在PID模塊中通過判斷兩路反饋信號的和(Fp+Fn)是否正常,決定是否進行PID計算并輸出新的PWM信號,設置兩路互補的反饋信號其實是一種硬件冗余措施,這對提高系統的安全性能是很有必要的。
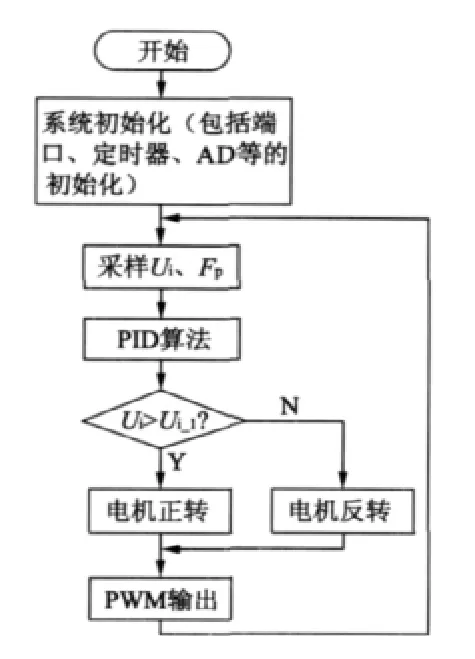
圖5 控制系統主程序流程圖
調試時,我們用一個可調的線性電位器來模擬駕駛員的需求,即油門踏板的下踏量,節氣門的開度則通過在集成開發環境IDE中觀測其開度輸出值以及現場觀測節氣門閥的開度來驗證。同時我們還進行了仿真,其結果如圖6所示。
從圖6中可以看出,節氣門開度的實際值滯后節氣門開度給定值的時間不超過1.55 ms,其實際值與給定值曲線基本吻合。這表明,電子節氣門采用該PID算法能快速、有效地使節氣門開度跟蹤給定值,具有較好的實用性。
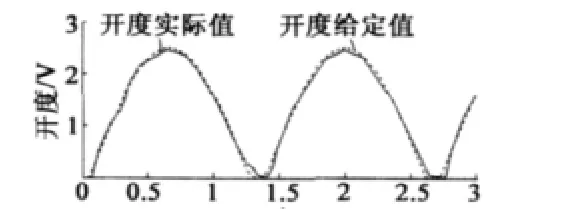
圖6 調試仿真結果
4 結 語
本文采用Cygnal單片機,設計了一種工程機械發動機的電子節氣門控制器,并對整個控制系統進行了調試仿真,結果表明所設計的電子節氣門控制器能滿足實際應用的要求,如果能得到發動機ECU的其它一些汽車工況信號,則該電子節氣門的控制將更加精確,能更好地實現降低油耗,減少排放以及提高駕駛舒適性的目標。如果將信號稍稍改動一下,該系統還可用來控制其它的直流伺服驅動系統。
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
電子制作(2019年13期)2020-01-14 03:15:28
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
電子制作(2019年15期)2019-08-27 01:12:10
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
電子制作(2019年9期)2019-05-30 09:42:02
黃河之聲(2017年13期)2017-01-28 13:30:17
汽車與新動力(2015年1期)2015-02-27 12:11:01
電子設計工程(2015年15期)2015-02-27 12:07:30