對學生拉曼光譜實驗結果的模糊評價
2011-02-01 03:34:38張研研牛二純任瑞晨王金龍
物理實驗 2011年8期
張研研,牛二純,任瑞晨,王金龍,陳 祺
(1.渤海大學物理系,遼寧錦州121013;2.遼寧工程技術大學資源與環境工程學院,遼寧阜新123000;3.太和區職業技能教育中心,遼寧錦州121000)
1 引 言
拉曼光譜是大學物理實驗中的重要實驗,學生通過實驗操作得到拉曼光譜圖,在此基礎上分析樣品的結構信息[1].實驗結束后教師需要對學生的光譜圖進行評分,這種測評帶有一定的主觀性和不公平性.本文以大學物理實驗中利用LRS-III激光拉曼光譜儀測量四氯化碳的拉曼光譜為例,闡述了對拉曼光譜圖像進行模糊綜合評價的方法,取得了較為客觀合理的測評結果.
2 實驗原理和實驗方法
拉曼散射是光和物質相互作用引起的,在光子和散射物質分子的碰撞過程中,散射物質會從入射光子吸收部分能量,或把自身的能量加給入射光子,再發射的光子便與原光子不相干,從而形成新的譜結構.當光子與分子發生彈性碰撞時,光子與分子之間沒有能量交換,此時,散射光與入射光頻率相同,這種頻率未變的譜線叫做瑞利線.當光子與分子發生非彈性碰撞時,光子改變了能量和運動方向,使散射光頻率ν與入射光頻率ν0不同,ν<ν0的譜線稱斯托克斯線;ν>ν0的譜線稱為反斯托克斯線.3種譜線的頻率各為ν0,ν0+Δν,ν0-Δν,而有用的信息就包含在Δν的數值及其強度、偏振等參量中.瑞利線的強度約為入射光強的10-3量級,較強的斯托克斯線的強度則不到入射光強度的10-6量級;反斯托克斯線起因于樣品中較高能態的作用,按玻爾茲曼分布律,其數甚少,因此其相應強度也大減,不到斯托克斯線的1/10[2].
通常拉曼光譜儀由5部分構成[1](如圖1所示):光源部分(提供單色性好、功率大的入射光)、外光路部分(聚光部件,是為了增強樣品上入射光的輻照功率,通常用合適的透鏡或透鏡組對激光進行聚集,使樣品正好處于匯聚激光束的腰部.集光部件,是為了最大限度收集散射光)、色散系統部分(使拉曼散射光按波長在空間分開)、接收系統部分、信息處理和顯示部分.
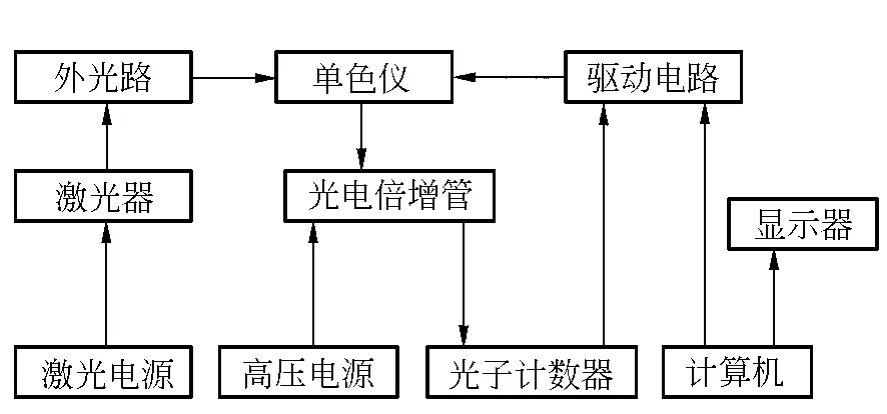
圖1 拉曼光譜儀的基本結構示意圖
本文采用天津港東生產的LRS-Ⅲ激光拉曼光譜儀,入射激光波長為532nm.采用光電倍增管或CCD作為拉曼光譜的單通道接收器件,單光子計數器進行信號處理,并應用計算機對譜儀運行自動控制、自動信號采集和加工處理.
學生操作的最主要部分是通過調節外光路,獲得理想的拉曼光譜圖像(如圖2所示).外光路如圖3所示,激光器射出的激光束被反射鏡R反射后,照射到樣品S上.為了得到較強的激發光,采用聚光鏡C1使激光聚焦,使在樣品容器的中央部位形成激光的束腰.為了增強效果,在容器的另一側放凹面反射鏡M2.凹面鏡M2可使樣品在該側的散射光返回,最后由聚光鏡C2把散射光匯聚到單色儀的入射狹縫上.

圖2 CCl4樣品的激光拉曼光譜圖
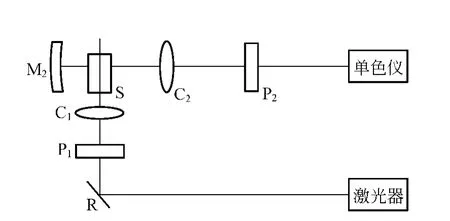
圖3 外光路示意圖
3 模糊數學模型在實驗圖像評價中的應用
大量實驗表明,激光拉曼光譜實驗的最佳工作參量為入射、出射狹縫寬0.15mm,閾值21V,積分時間350~600ms,負高壓8V[3],此時激光拉曼光譜的圖像分辨率高且較平滑.但學生在實驗操作過程中幾乎不能完全正確地找到最為理想的實驗參量,造成實驗圖像中存在著各種各樣的問題,這就對實驗圖像的評價帶來困難.以下通過模糊數學原理較為客觀地評價拉曼光譜實驗圖像的優劣.
3.1 模糊綜合評價原理
設因素集為A={A1,A2,…,An};評判集為V={v1,v2,…,vm}.對單個因素Ai(i=1,2,…,n)評判,得到V上的模糊集{r11,r12,…,r1m},組成評判矩陣
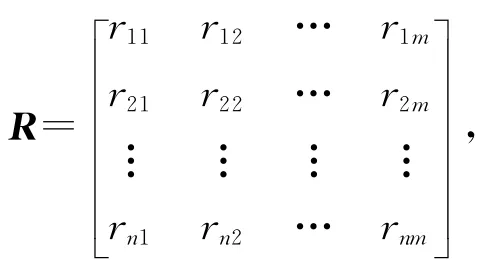
rij∈[0,1],j=1,2,…,m.又設各因素權重為α={α1,α2,…,αn},則綜合評判結果為

根據有關定理,可采用實數加乘運算代替與或運算,其結果仍是F集,且運算更為精細[4],即
3.2 模糊綜合評價在實驗圖像評價中的應用
學生獲得的實驗圖像中容易出現下列問題:圖像中瑞利峰的位置與入射光波長532nm不同,證明圖像沒有進行波長修正,導致所有峰的位置都會偏離準確值;實驗曲線不夠平滑,出現了一些強度較小的峰,說明閾值等參量調節不當;圖像分辨率主要通過觀察波長在555nm附近的相距很近的2個峰是否被分辨出來,若沒有分辨出來則說明儀器的入射和出射狹縫寬度沒有調節好,影響了圖像的分辨率;若峰的整體相對強度不強,則說明外光路或一些實驗參量沒有調節到最佳狀態.綜合以上因素,確定因素集為A={瑞利峰的位置,曲線的平滑度,圖像分辨率,峰的整體強度},由專家確定因素權重為α={0.2,0.3,0.3,0.2},評判集V={優,良,中,差}.
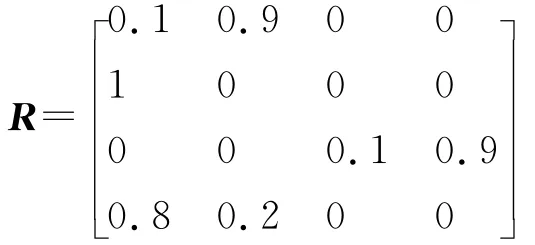
現以圖4某學生獲得的實驗圖像為例,進行綜合評價.首先根據圖像質量得到評判矩陣
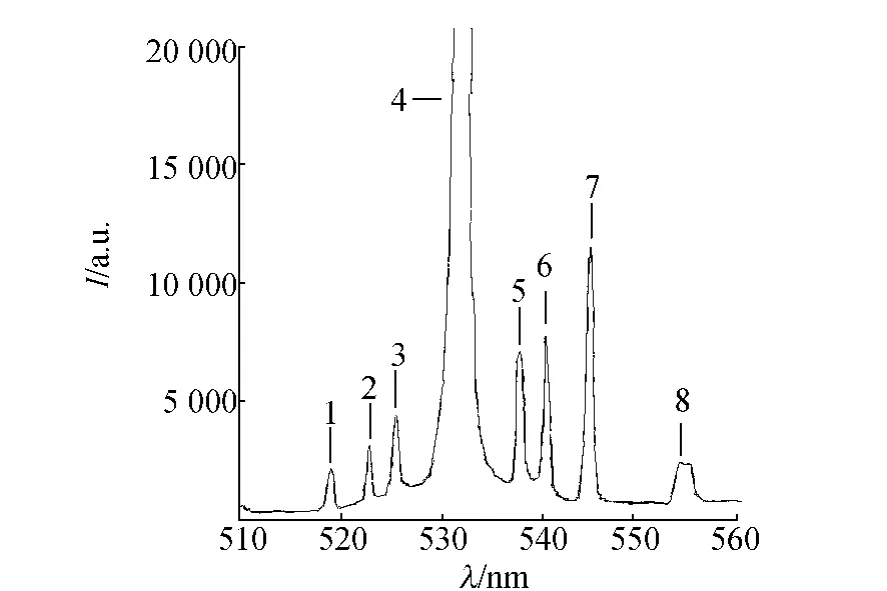
圖4 學生獲得的激光拉曼光譜圖
根據(1)式得B={0.48,0.22,0.03,0.27},實驗結果滿分為1,給評判集附上分值V={1,0.8,0.6,0.4},則該圖像最終評價分值為C=B·VT=0.782.
3.3 多因素模糊模式識別的原理
設影響模式識別的因素集A={A1,A2,…,An},記Xk為因素Ak的狀態集(論域).

其中i=1,2,…,m,m為模式的個數.通常取

其中αk∈[0,1],且表示因素Ak在模式確定中的重要程度,(xk)是Xk上的模糊子集.
給定待識別樣品x′=(x1′,x2′,…,xn′),由(2)式和(3)式得到(x1′,x2′,…,xn′)∈[0,1],它表示x′符合模式的可能性程度.對于m個模式,利用最大隸屬原則進行歸類[5].
3.4 多因素模糊模式識別在實驗圖像評價中的應用
設影響模式識別的因素集仍為A={瑞利峰的位置,曲線的平滑度,圖像分辨率,峰的整體強度},模式類別有優秀,良好,中等,差.第一個因素瑞利峰的位置對各模式的隸屬度分別用表示(單位nm),其函數關系如下(函數圖像如圖5所示):
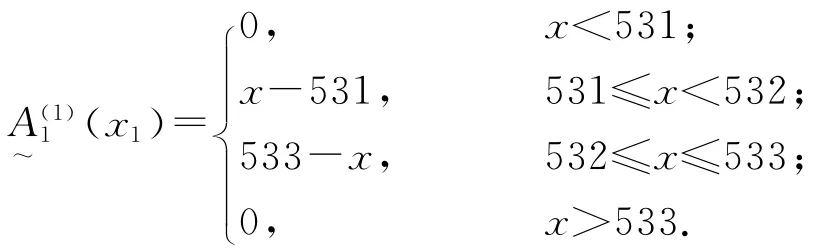
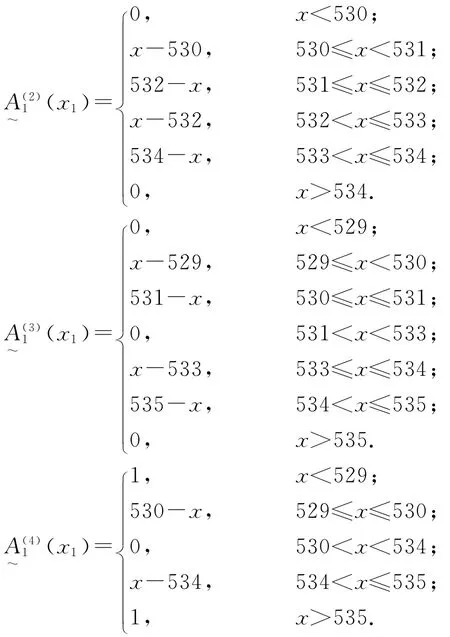
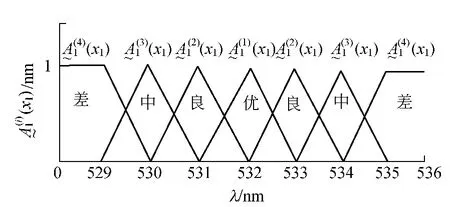
圖5 因素瑞利峰位置對不同模式的隸屬函數圖像
因素曲線的平滑度對各模式的隸屬函數中的x取圖像中峰的總個數k(當自動尋峰中的最小峰高取50時檢索出的峰的總個數,若圖像不平滑,則檢索出的峰較多);因素圖像分辨率對各模式的隸屬函數中的x取能把第8和第9個峰檢索出來時自動尋峰對話框中最小峰高的值I(最小峰高越高,證明第8和第9個峰值越高,圖像分辨率越好);因素峰的整體強度對各模式的隸屬函數中的x取第7個峰的峰值I7(這里以第7個峰說明,當然選擇其他峰作為參照也可以).這3個因素對各模式的隸屬函數這里不再贅述,由圖6~8可看出其隸屬關系.
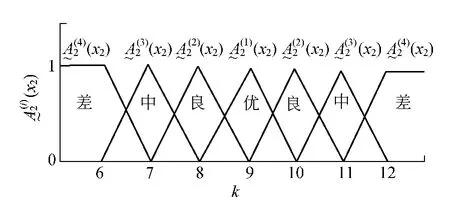
圖6 拉曼峰個數x對不同模式的隸屬函數圖像

圖7 最小峰高值I對不同模式的隸屬函數圖像
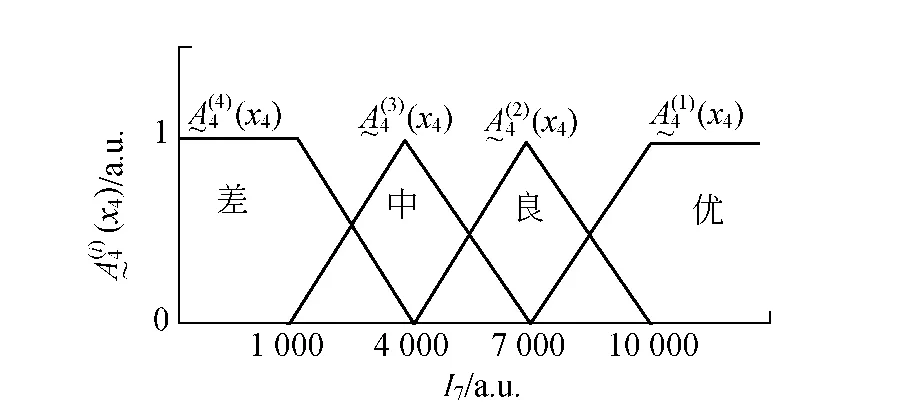
圖8 第7個峰峰值I7對不同模式的隸屬函數圖像
現仍以圖4的實驗圖像為例,進行模糊模式識別.圖4在尋峰過程中采用的是計算機自動尋峰,自動尋峰對話框中的最小峰高設為50,峰的位置和強度值會自動顯示在對話框中.由此可得到因素集中的各因素的值為:瑞利峰波長531.8nm,最小峰高值為50時檢索出的峰的個數仍為9個,最小峰高值為50時仍不能分辨出第8和第9個峰,第7個峰的峰高值為11 423.把各值代入隸屬函數中結果為,其他隸屬函數值為0.設因素權重仍為α={0.2,0.3,0.3,0.2}.由(2)式和(3)式得各模式的可能性程度=0.66,=0.04,=0,=0.3.值最大,故該圖像成績為優秀.若給各模式附上分值{1,0.8,0.6,0.4},則實驗圖像最終成績為0.812分,與前面綜合評價所得結果相似,都約為0.8分.
4 結束語
綜上所述,本文僅以拉曼光譜圖像的評價為例,應用模糊數學對實驗結果進行評價,得到了更為合理和客觀的評價結果.如果能把上述模糊數學評價模型編成計算機程序,則評價起來更方便.
[1] 張天喆,董有爾.近代物理實驗[M].北京:科學出版社,2004:56-60.
[2] 師振宇,黃山,方堃,等.拉曼光譜實驗方法及譜分析方法的研究[J].物理與工程,2007,7(2):60-64.
[3] 申曉波,郝世明,胡亞菲.激光拉曼光譜實驗最優實驗參數的確定[J].物理實驗,2009,29(10):31-33.
[4] 韓曉晨,邰曉紅.企業績效的模糊評價[J].科學技術與工程,2005,5(17):1277-1281.
[5] 郭嗣琮,秦書玉.采礦工程中的模糊數學方法Ⅱ[J].阜新礦業學院學報,1992,11(1):126-134.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51