淺談PSS 對低頻振蕩的抑制作用
2011-03-10 00:20:10常改花
山西建筑 2011年12期
常改花
1 系統互聯
作為電力系統,因其本身具有統一性、同時性和廣域性的特點,致使全國性、區域性以及跨國性的電網互聯,以其大范圍資源優化配置、經濟性和可靠性的優勢而受到各國政府和電力部門的普遍重視和大力促進。但以往的獨立電網結構相對緊密,電網固有振蕩模式阻尼較強,各區域間振蕩模式多表現為較低頻率的負阻尼或弱阻尼,在系統擾動和事故情況造成區域間發電機組相對搖擺過程中,易造成互聯系統的低頻振蕩及系統的動態不穩定。我國在這些聯網工程實施的過程中,都遇到了聯網系統阻尼弱,特別是存在區域間的弱阻尼或負阻尼低頻振蕩問題。
2 低頻振蕩
2.1 低頻振蕩產生的原因
1)系統在負阻尼時產生的自發功率振蕩;2)系統在受到擾動時,由于阻尼弱其功率振蕩長久不能平息;3)系統振蕩與系統中某種功率波動的頻率相同,而且由于弱阻尼,使聯絡線上該功率波動得到放大,產生了強烈的功率振蕩;4)由發電機轉速變化引起的電磁力矩變化和電氣回路渦合產生的機電振蕩,其頻率約為0.2 Hz~2 Hz。
2.2 低頻振蕩數學定義
下面以單機無窮大系統進行簡單論述,忽略線路損耗及分布電容,發電機采用單機無窮大系統,發電機采用經典二階模型。設Xd'后的暫態電勢E'恒定、機械功率Pm恒定,D為定常阻尼系數,主要計及D,Q繞組在動態過程中的阻尼作用和轉子機械阻尼。

在工作點線形化,則:

當無阻尼(D=0)時,相應特征根為:

這對根反映了機組轉子角增量Δδ在擾動后的過程中將相對無窮大系統作角頻率為ωn的等幅振蕩。若設M=6 s~12 s=(6~12)ωB,并設EUcosδ0≈1,X∑=0.2~10。
由式(5)可得:

對于50 Hz系統,相當于fn,max≈2.5 Hz,而fn,min=0.25。
其中,ωn為系統無阻尼自然振蕩角頻率。在多機系統中,通常認為系統低頻振蕩頻率范圍為0.2 Hz~2.5 Hz。
若系統低頻振蕩頻率很低(如0.2 Hz~0.5 Hz),則認為屬互聯系統區域間振蕩模式。而如果振蕩頻率較高,在1 Hz以上,則認為是本地或區域內機組間的振蕩模式。
3 改善系統阻尼的措施
由于低頻振蕩產生的原因就其本質而言,是系統的控制措施帶來的負阻尼。所以控制思路有兩類:1)調整控制措施,減小其帶來的負阻尼;2)通過附加控制提供額外的阻尼。即一次系統方面的對策和二次系統方面的對策。前者的控制措施一般都是為了提高系統的穩定性、經濟性或供電質量。調整控制會帶來其他損失,一般避免使用這一類方法。所以,目前常用的控制方法一般都基于第二種思路。二次系統的對策主要有:采用電力系統穩定器(PSS)作勵磁附加控制,適當整定(PSS)參數可提供抑制低頻振蕩的附加阻尼力矩;利用SVS裝置的附加控制及直流輸電附加控制或直流功率調制提供低頻振蕩的附加阻尼。
4 PSS對低頻振蕩的抑制作用
4.1 電力系統穩定器
目前抑制低頻振蕩較有效的辦法是通過設置電力系統穩定器(Power System Stabilizer,簡稱PSS)來實現。即引入一個附加的ΔTe,使之成為一個較強的低頻振蕩阻尼力矩。
隨著電網互聯規模的擴大,增強互聯系統的阻尼特性顯得尤為重要。解決區域間一個發電機群對另一個發電機群的弱阻尼或負阻尼振蕩模式,僅靠少數幾臺發電機的PSS是不夠的,需要一大批與該振蕩模相關的發電機配置電力系統穩定器(PSS)。投運這些PSS增強了聯網系統的阻尼,保證了聯網系統的動態穩定性。
4.2 PSS的工作原理
PSS的應用是為了給弱阻尼或負阻尼系統增加阻尼,對一個可能引起負阻尼的勵磁調節器,向其中注入某些附加控制信號,使之可以提供正的阻尼,平息振蕩,這就是PSS最基本的原理。PSS作為一種附加勵磁控制環節,即在勵磁電壓調節器中,通過引入附加信號,產生一個正阻尼轉矩,去克服勵磁調節器引起的負阻尼,控制量可以采用電功率偏差(ΔP)、機端電壓頻率偏差(Δf)、過剩功率(ΔPm)和發電機軸速度偏差(Δw)以及它們的組合等。它不僅可以補償勵磁調節器的負阻尼,而且可以增加正阻尼,使發電機有效提高遏制系統低頻振蕩能力。
4.3 PSS的抑制作用
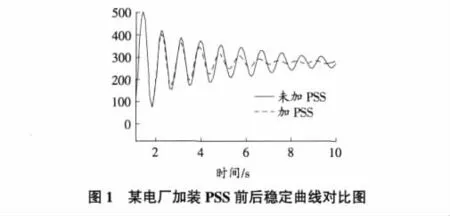
通過中國電力科學研究院的BPA計算程序,山西電網正常運行小方式,當有小擾動的條件下,山西電網某電廠在加PSS和不加PSS的穩定曲線見圖1。
5 結語
PSS的技術十分成熟,其設計、安裝、調試、運行較為簡單,并且通過仿真計算證明其可以有效提供正阻尼,抑制電網低頻振蕩,保證電網的動態穩定性。
[1] 袁季修.電力系統安全穩定控制[M].北京:中國電力出版社,1996.
[2] 倪以信.動態電力系統理論和分析[M].北京:清華大學出版社,1993.
[3] 郝思鵬.電力系統低頻振蕩綜述[J].南京工程學院學報,2003,1(1):1-8.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
故事作文·高年級(2021年12期)2021-12-21 02:32:35
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
