基于混沌與DFT對無人機控制不穩定性的研究
2011-03-23 07:36:30劉利釗張天華胡曉京李茂青
哈爾濱工程大學學報 2011年1期
劉利釗,張天華,胡曉京,李茂青
(1.廈門大學信息科學與技術學院自動化系,福建廈門361005;2.路易斯安那理工大學電子工程學院電子信息工程系,路易斯安那州羅斯頓70112)
直升機作為集成了現代最新科技的旋翼型飛行器應用廣泛,機載控制系統和地面控制系統的信息化發展增強了直升機的飛行穩定性和可控性[1-4],減少了其在執行任務時的失事概率.但同時這也使直升機成為了復雜的旋翼型信息化空中平臺:機體構造與機載系統融為一體;整體結構參數愈趨繁復;運動特征愈趨多變,而且在特定的情況下[5]會產生不穩定現象.新加坡國立大學陳本美教授和其無人機團隊在無人直升機控制方面取得了很多重要的成果.以無人駕駛直升機為實驗對象,并通過對陳本美教授及其他無人機團隊遇到的若干次墜機事件[6-8]的分析發現:直升機系統本身應該是一個內隨機系統,它在某些飛行狀態會出現不穩定現象;經典的直升機非線性模型是一個內隨機模型,參數的某些搭配可能導致模型運動曲線的發散;辨識模型對某些信號的不敏感或者誤判是飛機自動控制系統不穩定乃至易失控的原因之一,模型辨識中運用DFT算法對某些高次諧波的人為省略則是使辨識模型與實際系統發生偏離的重要原因.
1 經典的無人直升機運動模型與模型辨識技術
1.1 直升機飛行運動模型
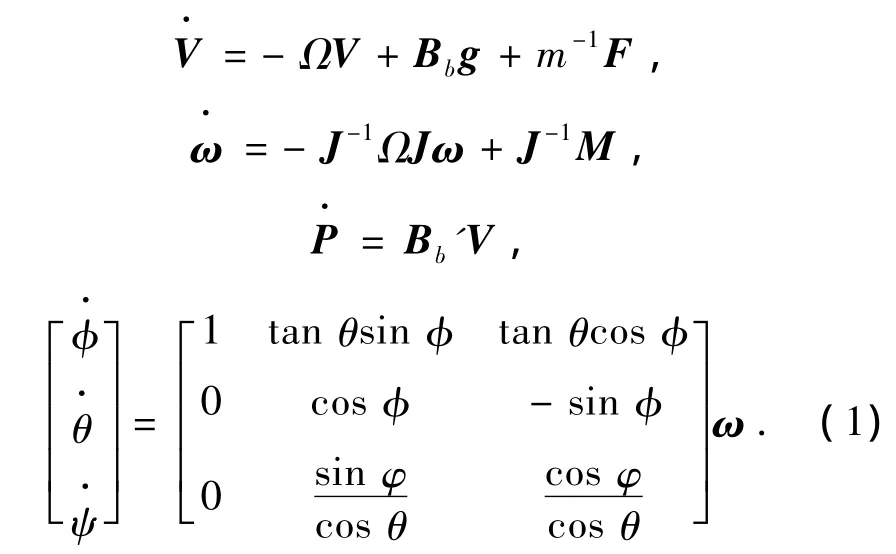
經典直升機非線性運動模型如下:
1.2 模型辨識與直升機偏航模型
給定無人直升機控制系統如圖1所示[9-10].
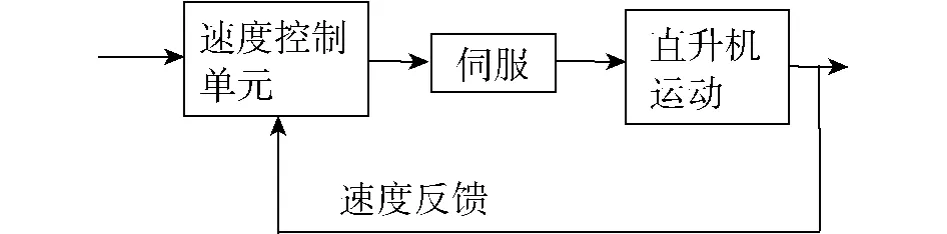
圖1 直升機控制系統Fig.1 Helicopter control system
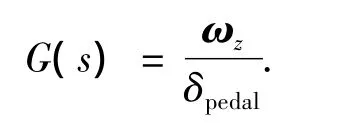
下文中用δpedal表示直升機偏航輸入量,ωz代表直升機在Z平面內角速度.把計算系統、伺服系統和直升機運動系統看做整體偏航系統,該偏航模型的傳遞函數表示形式為
將若干組正弦、階梯、隨機、脈沖樣本信號作為輸入信號,測試并記錄輸出的ωz,抽樣過程中盡量使抽樣頻率T→Tmin,DFT變換保留前三階諧波.
2 波動信息能量函數
定義1 對于任何一個給定函數f(t)頻域對應函數f(s),可以將其表示為,其中f(si)為連續可導函數,那么該函數的波動信息能量變換為
波動信息能量比為
物理含義:波動信息能量函數代表某一給定樣本信號在選定頻域內的波動信息所具有的能量總和.波動信息能量比表示該信號某一頻率的后段高頻能量與總能量的比值.
定義2 設某系統的物理傳遞函數為W(S),辨識傳遞函數為G(S),{S1,S2…Sn}為試驗樣本集,若
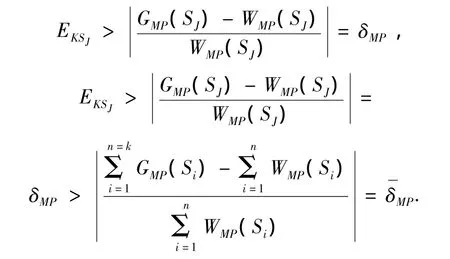
式中:δMP為幅頻、相頻擬合偏差比,則為幅頻、相頻平均擬合偏差比.
3 DFT信息能量的不穩定性分析
對于離散信號x(n),長度為N來說,DFT變換:
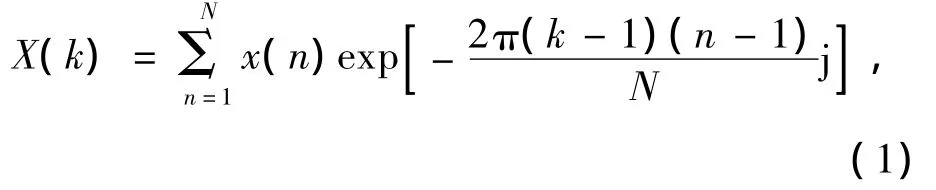
DFT反變換:
又可以表示為
對于高次諧波:
一般情況下DFT和FFT變換只保留除主波值以外的二、三階諧波.X(n)的2種信息能量變換為
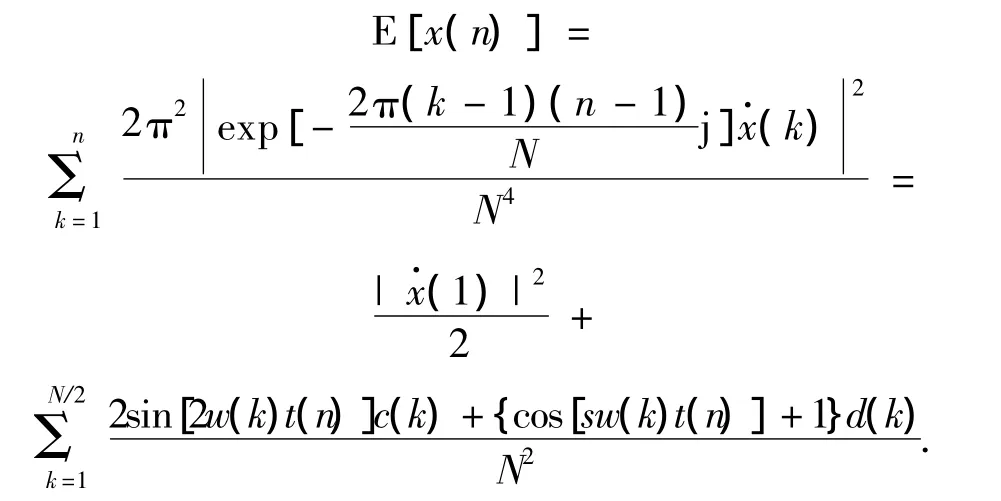
式中:
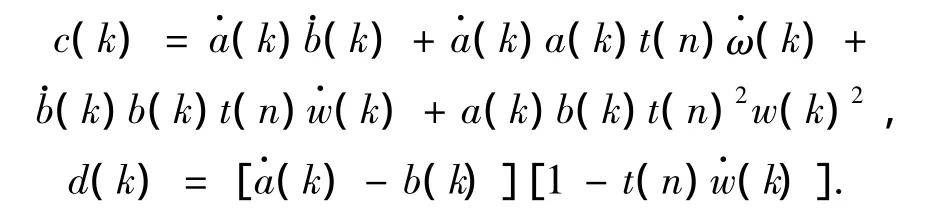
對于不同頻率不同波動程度的函數能量比較如圖2.可見信號的在住諧波能量確定的情況下,高次諧波所具有的信息能量與其波動程度成正比.
假設抽樣周期為T,離散化信號長度為n.給指定無人直升機系統輸入一周期1 s,幅值0.2單位,初始相位π/4的正弦樣本信號[11-12]:

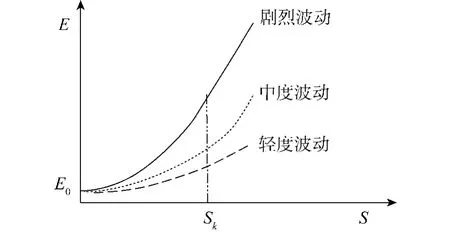
圖2 不同函數波動能量對比Fig.2 Comparison of different wave energy function
該信號時域、幅頻特性如圖3,圖中k=3代表1 Hz波動信息能量為
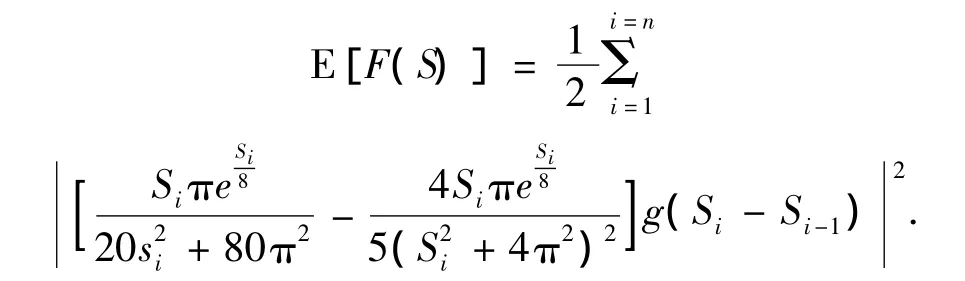
當ni-ni-1=nj-nj-1,i≠j<n,k=3,K→∞時,
該正弦樣本信號經過DFT變換并保留主諧波后,將導致原信號波動信息能量大幅減少.
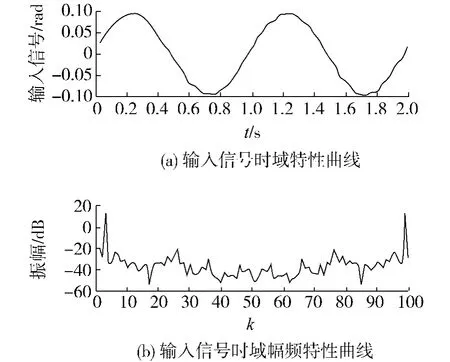
圖3 初始相位π/4正弦樣本信號Fig.3 The initial phase of sinusoidal signal samples
信號響應輸出如圖4,圖中k=3代表1 Hz.k= 5,8,36,44,60,82,85,90時,幅頻曲線波動明顯且信號運動趨勢發生偏轉.
該試驗系統對信號高頻部分的整體敏感度不高.但如果輸入信號在輸入輸出反映劇烈的頻率點上丟失信息或者存在信息偏差,將可能造成幅頻曲線的劇烈震動,同時也有可能造成相頻曲線和時域特性曲線的大幅偏移.對于確定系統來說此高階部分能量影響甚微,但對于隨機系統來說,高次諧波的偏轉可能導致系統內相關參數的劇變或者耦合,從而影響整個系統的運動性能和軌道.
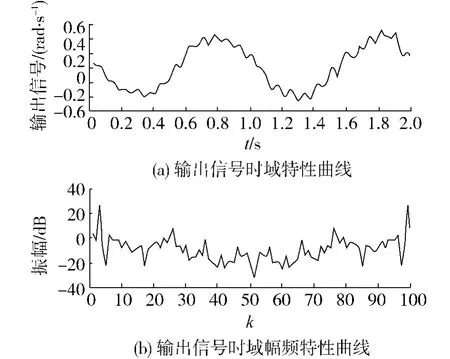
圖4 相位π/4樣本信號輸出響應Fig.4 The signal output response of π/4 phase samples
通過對某一無人直升機系統連續輸入20個0.5~10 Hz的正弦波、階梯波、隨機波等樣本信號,獲得如下辨識模型[13-14]:

該模型與實際系統的幅頻和相頻特性比較如圖5所示.取試驗樣本集{S1=0,S2=0.001…Sn=100},其中Sj-Sj-1=0.001,假設抽樣周期為0.000 01 s,DFT變換保留前3項,則
EKSJ≈0.7>δP=0.2>δM=0.1.根據定義2:δM>,判定該辨識模型在某些高階信號處的幅頻-相頻將發生大幅偏轉和反向運動,并在時域范圍內展示為劇烈抖動和逆向輸出.
根據擬合信號可以發現模型在低頻部分0.1~0.5 Hz的幅頻和相頻均跟隨較好;幅頻曲線從0.5~5 Hz開始發生分離,同時相頻曲線跟隨較好;幅頻曲線和相頻曲線從5~10 Hz內均發生偏離,其中2條幅頻曲線運動趨勢相同,相頻曲線運動趨勢相悖.
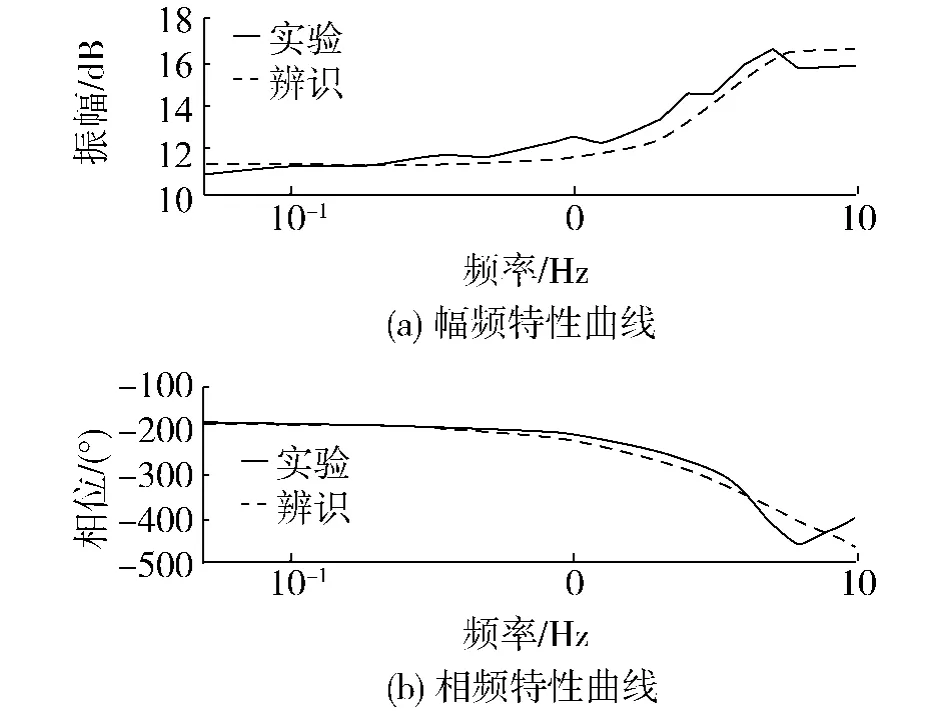
圖5 辨識模型與實際幅頻輸出響應比較Fig.5 Amplitude-frequency output response comparison between identification model and actual model
該模型時域輸出如圖6中所示,0.5 Hz的正弦信號擬合完好;1 Hz的正弦信號在1.6 s、1.75 s、2.2 s、2.3 s、2.4 s等位置出現與原信號反趨勢的運動[15-18].

圖6 辨識模型與實際時域輸出響應比較Fig.6 Comparison of identification model and the actual output response in time
從以上可以看出DFT變換省略的高次諧波可能導致系統模型對某些頻率信號的輸出反應出現較大誤差或發生逆轉[15,19].
4 Shilnikov標準速度方程
直升機非線性系統宏觀穩定,內隨機區域可能存在于:速度、角速度、動力與飛機自身結構存在綜合函數關系,若經典非線性運動方程組中任何一個方程出現混沌,則該方程組將出現混沌;速度與角速度均受另外2個參數和時間的直接影響,可能導致速度與角速度無法實時同步與協調;需要各個參數達到某一特定值時,參數間可能出現矛盾或無法按照預設的軌道變換.這些都可能導致該模型的不穩定、鎖死或者出現混沌失控現象.
在速度方程中,角速度矩陣Ωx=ω×x,其中,
直升機慣性矩陣J可展開為
傳輸矩陣Bb可展開為
Cv0=g·Bb在速度方程中可視為可變換常數矩陣.式中:
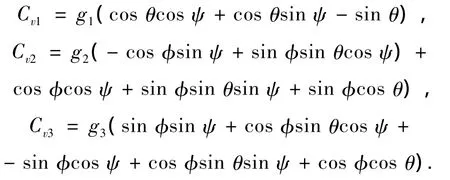
力向量F=Fm+Ft+Ff.
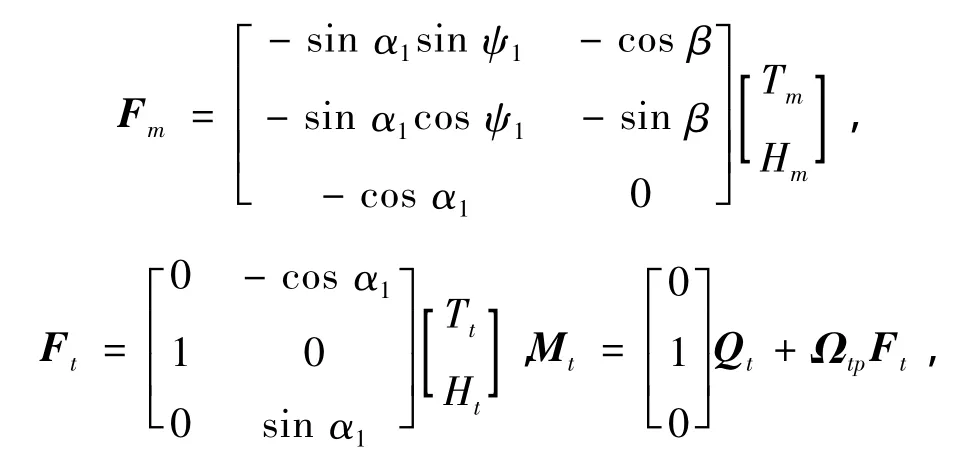
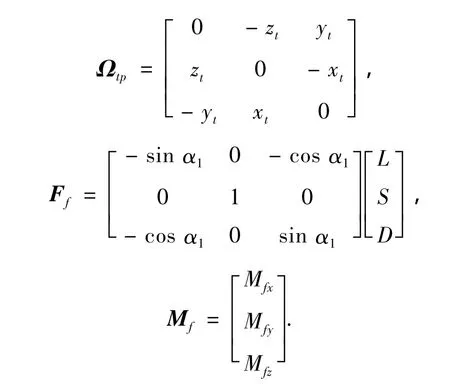
力矩向量M=Mm+Mt+Mf,
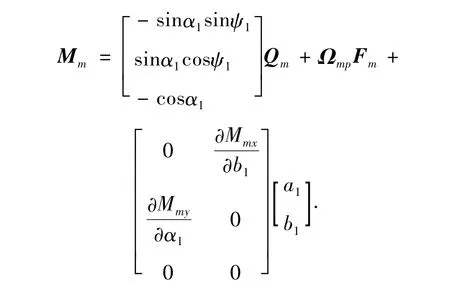
可得直升機合力與速度、角速度和位置的函數關系:

將其帶入原速度方程(1)可得
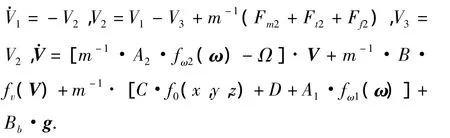
整理可得Shilnikov標準速度方程[17-18]:

同理可得Shilnikov標準速度方程:

常數項C不影響該方程的不穩定性.接下來以速度方程為分析對象來說明其具有不穩定性和混沌特征.
5 非線性速度方程的不穩定分析與混沌特征
設(V1,V2,V3)為非線性速度方程V·=Aω·V+ Bv·F(V)+Cv的解空間,該方程有可能有多個平衡點.限于篇幅暫尋找幾個以說明其混沌特性[16,22].當Aω=Ω且
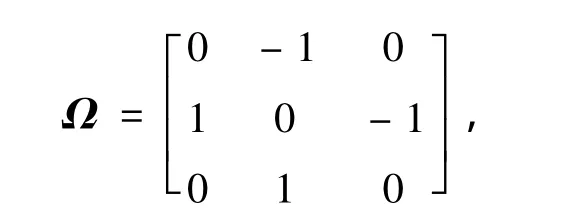
Fm1+Ft1+Ff1=0,Fm3+Ft3+Ff3=0時,
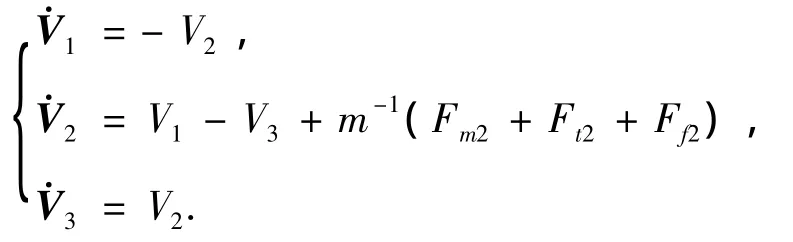
Fm1+Ft2+Ff3為飽和函數時,該方程如下:
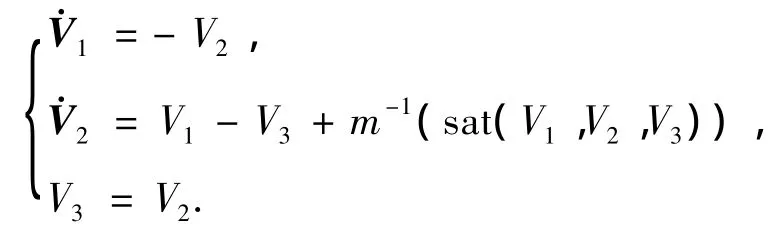
該方程有平衡點:
系統具有3個平衡點:V1=(-m-1,0,0),V2= (0,0,0),V3=(m-1,0,0).當V1≥k時,V1=-m-1,V1平衡點穩定;當V1≤-k時,V1=m-1,V3平衡點穩定;當k≥V1≥-k時,若k=-m-1,V1為任意值;若k≠-m-1,V1=0,V2平衡點不穩定.
當該三階非線性速度方程參數配置如上時,該系統出現混沌的條件如下:
1)在平衡點V1和V3處的Jacobian矩陣的特征值δi±jωi、γi,i=1,2,滿足如下條件:|γi|>|δi|>0,δ1δ2>0;V1、V3為鞍焦點.
2)V1、V2、V3位于同一條空間直線上,存在異宿軌道.
6 非線性速度方程的混沌仿真
根據Shilnikov定理[17-18],直升機非線性速度方程可以產生混沌.
取系統(1)的矩陣Aω=Ω中的參數為wz=wy= wx=-0.9,當Bω=0時系統的平衡點位于(0,0,0),系統特征值為-0.098 3,0.156 4+0.739 8i,0.156 4-0.739 8i,該平衡點穩定但系統不會進入混沌.選取系統的初始值為(0.3,0.14,0.13),Bω= BΔ則系統的狀態變量V1、V3的相平面圖如圖7所示,可以看出明顯的混沌現象.
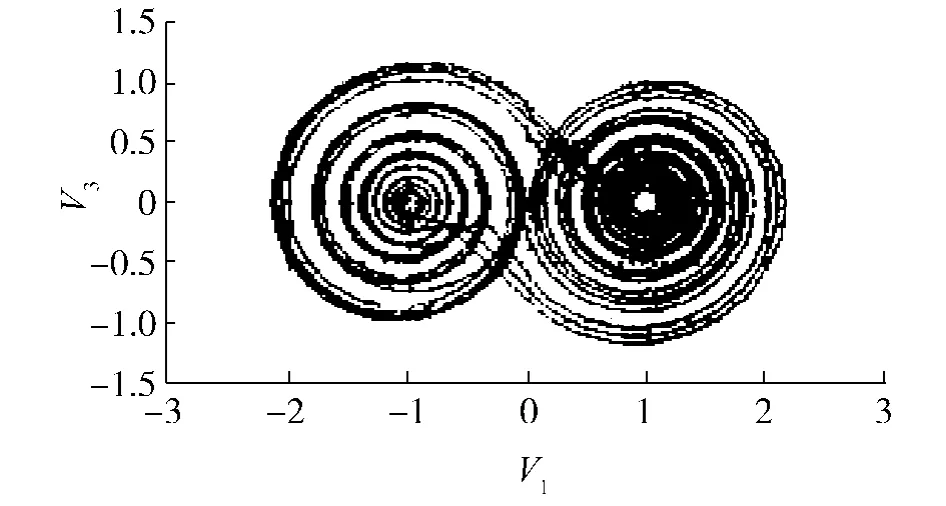
圖7 非線性史尼科夫混沌仿真Fig.7 Shilnikov nonlinear chaos simulation
7 R-REFRLEX仿真
選取試驗機型為雷虎-90型標準機型,如圖8左,同時該機型與新家坡國立大學無人機課題組的試驗機型相同,可以印證他們控制過程中發生失控的原因.自動控制部分選擇不易發生電磁干擾和混沌同心干擾的DIAMOND集成系統,該系統從以往的試驗和結論表明[23-24],可以Din1xy≈Din1xymin,Dout1xy≈Dout1xymin,從而在仿真過程中忽略控制系統對無人直升機系統穩定性造成的影響.其系統結構如圖8右所示.
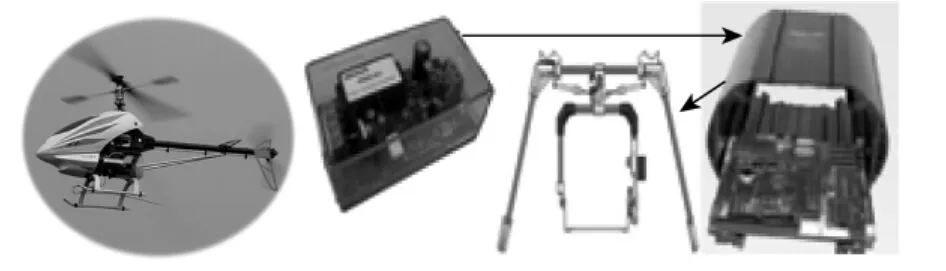
圖8 無人直升機系統集成結構圖Fig.8 Integration structure of UAV systems
采用飛鼠無人機地面控制軟件,設定無人直升機按照回型封閉航線進行飛行.如圖9所示,在飛行過程中始終調整速度方程F(V)+Cv中的參數Aω=Ω.變換角速度矩陣Ω=中角速度值,同時隨機變換V向量值,在變換中盡量使V與w獨立,從而滿足Shilnikov定理,并使原方程中V與w的解空間內某一子集中的所有解組合都出現在飛行狀態中.
仿真結果如圖10所示,無人直升機的飛行路線用細線條表示,在變換V與w的過程中,大多數情況下系統處于正常狀態.但粗黑線條所標出的路線卻極不穩定,而且多次出現事故.說明在Aω=Ω的條件下,V與w在某值域內的組合會使無人直升機系統進入不穩定或者混沌狀態[25],從而導致失控.
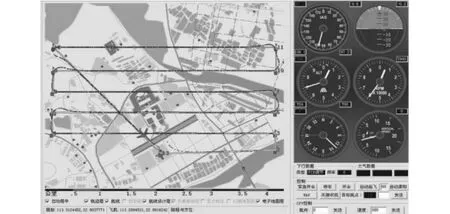
圖9 直升機封閉路線飛行仿真Fig.9 Simulation of helicopter flight in closed line

圖10 無人機封閉路線混沌仿真Fig.10 Simulation of UAV chaos in closed line
8 結束語
通過仿真可以看出無人機非線性模型所描述的運動系統確實具有不穩定性,DFT算法所帶來的負面影響不可忽略;在選定無人機非線性運動方程的部分初始條件下,連續嘗試其解空間的解組合可以搜索到原方程的不穩定區域或者系統的內隨機區域.這也就說明了無人機在長時間內連續執行不同任務時所產生的不穩定性,進而證明了運用DFT算法辨識出來的系統模型來控制具有非線性運動特征的無人機系統會產生不穩定、或在特定情況下進入混沌的極大可能性.這將為解釋無人機失控乃至有人駕駛飛機失控的現象提供一個思路,從而針對失控現象的構成因素謀劃應對策略與技術改進.但是目前在飛行仿真中只能記錄航點數據,無法確切記錄每一個航點上無人機的具體狀態數據,這給驗證飛行仿真數據與MATLAB仿真數據之間的對應關系制造了障礙,從而無法找到原方程的所有不穩定區域,而只能通過特例來尋找某些特殊的不穩定點.這部分將是接下來要解決的問題.
[1]METTLER B.Identification modeling and characteristics of miniature rotorcraft[M].New York:Kluwer Academic Publishers,2003:225-228.
[2]PROUTY RW.Helicopter performance,stability,and control[M].Malabar:Robert Krieger Publishing Company,1990:155-158.
[3]SHIM D H,KIM H J,SASTRY S.Control system design for rotorcraft-based unmanned aerial vehicle using time-domain system identification[C]//Proc of 2000 IEEE International Conferenceon ControlApplications.Anchorage,USA,2000:808-813.
[4]SUGENO M,HIRANO I,NAKAMURA S,et al.Development of an intelligent unmanned helicopter[C]//Proc of 1995 IEEE International Conference on Fuzzy Systems.Yokohama,Japan,1995:33-34.
[5]LIU L Z,LIU Y C,HUANG Z L,et al.The chaotic disturbance of UAV system's communication and coping strategy[C]//ICCCAS08 Proceedings.Xiaman,China,2008:155-160.
[6]CAI G W,PENG K M,CHEN B M,et al.Design and assembling of a UAV helicopter system[C]//Proc of 5th International Conference on Control&Automation.Budapest,Hungary,2005:697-702.
[7]CHEN B M,LEE T H,PENG K M,et al.Hard disk drive servo systems[M].London:Springer,2006:112-118.
[8]HE Y,CHEN B M WU C.Composite nonlinear control with state and measurement feedback for general multivariable systems with input saturation[J].Systems&Control Letters,2009,54:455-469.
[9]CAI G W,CHEN B M,PENG K M,et al.Modeling and control system design for a UAV helicopter[C]//MED06 Proceedings.Ancona,Italy,2006:132-137.
[10]STEVENS B L,LEWIS F L.Aircraft control and simulation[M].2nd ed.Hopoken:John Wiley&Sons,2003:87-92.
[11]PENG K M,CAI G W,CHEN B M,et al.Comprehensive modeling and control of the yaw dynamics of a UAV helicopter[C]//Proceedings of the 25th Chinese Control Conference.Harbin,China,2006:316-322.
[12]METTLER B.Modeling small-scale unmanned rotorcraft for advanced flight control design[D].Pittsburgh:Carnegie Mellon University,2001:46-47.
[13]劉利釗,張天華,劉英超,等.無人控制系統的邊緣失控研究與建[C]//CPCC2008會議論文集.北京,2008:57-60.
LIU Lizhao,ZHANG Tianhua,LIU Yingchao,et al.Research and modeling of edge out-of-control on unmanned system[C]//CPCC2008 Conference Proceedings.Beijing,China,2008:57-60.
[14]劉利釗,張天華,胡曉京,等.無人控制飛行器的模型細化與混沌控制[J].儀器儀表學報,2008(4):120-124.
LIU Lizhao,ZHANG Tianhua,HU Xiaojin,et al.Unmanned aircraft model refinement and chaos control[J].Scientific Instrument,2008(4):120-124.
[15]劉彬,謝平.一種實序列FFT的新算法[J].燕山大學學報,1997,21(2):11-15.
LIU Bin,XIE Ping.A new algorithm for real valued sequence of FFT[J].Journal of Yanshan University,1997,21(2):11-15.
[16]PECORA L M,CARROLL T L.Driving systems with chaotic signals[J].Phys Rev Lett,1991,44(4):23-74.
[17]KOCARE L,PARLITZ U.General approach for chaotic synchronization with applications to communication[J].Phys Rev Lett,1995,74(25):5028-5046.
[18]TOKUDA I,TAMURA A,TOKUNAGE R,et al.Learning algorithm for chaotic dynamical systems which solve optimization problems[J].IEICE Trans,1998,81:377-388.
[19]孫福玉.傅里葉變換與拉普拉斯變換關系的可視化分析[J].赤峰學院學報:自然科學版,2007,23(1):36-40.
SUN Fuyu.Visual analysis of the relationship between Fourier transform and Laplace transform[J].Journal of Chifeng College Natural Science Edition,2007,23(1): 36-40.
[20]王茂海,劉會金,彭輝,等.采樣信號頻率偏離設計值情況下離散傅立葉變換的誤差分析[J].電測與儀表,2001,38(1):22-26.
WANG Maohai,LIU Huijin,PENG Hui,et al.Analysis on errors of discrete Fourier transform(DFT)in case of signal frequency drifting from designed value[J].Electrical Measurement&Instrumentation,2001,38(1):22-26.
[21]SILVA C P.Shilnikov's theorem_A tutorial[J].IEEE Transactions on Circuits and Systems_I:Fundamental Theory and Applications,1993,40(10):32-37.
[22]王平,馮勇,孫黎霞,等.線性系統通過非線性反饋產生的混沌現象[J].自動化技術與應用,2002,21(5):4-6.
WANG Ping,FENG Yang,SUN Lixia,et al.Chaos caused by linear systems through nonlinear feedback[J].Automation Technology and Application,2002,21(5):4-6.
[23]LIU L Z.The chaotic characters and new control strategy of unmanned airplane information system[C]//International Symposium on Computational Intelligence and Design 2008 Proceedings.Xiamen,China,2008:120-123.
[24]PERRY F W,MARK T,M,ADAMS J W.Techniques for measuring the electromagnetic shielding effectiveness of materials:Part I:far-field source simulation[J].IEEE Transactions on Electromagnetic Compatibility,1988,30 (3):239-250.
[25]GREENE K.Hidden in disorder:chaos-encrypted information goes the distance[J].Science News,2005,168 (21):325.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45