基于ARM9Linux系統的模糊自整定PID溫度控制器的設計
2011-03-27 07:31:48唐重和劉克平
長春工業大學學報 2011年3期
李 巖, 唐重和, 劉克平
(長春工業大學電氣與電子工程學院,吉林長春 130012)
0 引 言
溫度控制系統對生化分析儀的檢測分析過程具有很大的影響,生化檢驗結果的可靠性與反應盤的溫度精度密切相關。常規PID控制關鍵在于調整比例、積分、微分3個參數,使之既要相互配合,又要相互制約,從而達到最優效果。模糊控制不依賴于精確的數學模型,是基于啟發性的知識和語言決策規則設計的,增強了控制系統的自適應能力[1]。但在生化分析儀反應盤溫度控制系統中,當偏差和偏差變化率偏小時,傳統的模糊控制方法就難于控制。如果將PID控制和模糊控制兩種方法結合起來,利用模糊控制器來給PID控制器在線自整定(或者自校正、自調整)PID參數構成模糊自整定PID控制器,就可以取得理想的效果[2]。文中設計采用ARM9處理器,將模糊自整定PID算法[3]通過嵌入式 Linux系統實現,從硬件和軟件兩個方面大大提高了控制系統的精確性和穩定性。
1 系統硬件設計
系統以S3C2410處理器為核心,主要由溫度采集單元、功率輸出驅動單元、鍵盤顯示單元以及存儲單元組成。
S3C2410是一款低價位、低功耗、高性能的32位 RISC嵌入式處理器。其采用ARM920T內核,具有五級整數流水線,工作頻率高達266 MHz,獨立的16 KB指令和16 KB數據的緩存(Cache),用于虛擬內存管理的MMU單元,LCD控制器(STN&TFT),非線性(NAND)FLASH的引導單元系統管理器(包括片選邏輯控制和SDRAM控制器),3個通道的異步串口(UART),輸入輸出端口,實時時鐘單元(RTC),帶有觸摸屏接口的8個通道的10 bit ADC,IIC總線接口,IIS總線接口,USB的主機(host)單元,USB的設備(Device)接口,2個通道的SPI接口和鎖相環(PLL)時鐘發生單元。
溫度采集模塊采用一線制數字溫度傳感器DS18B20,其測量可精確到0.062 5℃。程序將與之連接的單線端口設置為GPIO口,通過對引腳清零和置位寄存器進行設置并進行軟件延時,即可產生復位及寫0、寫1、讀0和讀1的時序,并編寫溫度檢測應用程序。經過模糊自整定PID算法模塊計算后的PWM輸出量直接控制功率驅動單元,完成對反應盤溫度的控制。功率輸出驅動單元主要采用L6203驅動器控制帕熱帖進行加熱和制冷。
顯示模塊選用的是SHARP公司的TFTLCD器件。S3C2410內部自帶 LCD驅動控制器,通過內部寄存器設置相應的顯示模式。另外,在嵌入式Linux系統下開發了相應的驅動程序,使其能夠正常顯示溫度的設定值與返回值。溫度值的設定通過系統采用SPI接口的鍵盤顯示控制芯片 ZLG7289與 S3C2410的 SPI接口連接,ZLG7289的行線R[2:0]和列線C[7:0]構成矩陣鍵盤,同時在芯片內部可自動完成掃描、譯碼、去抖動處理等任務。另外,系統中Nand Flash存儲器用來存儲的算法模塊運行時需要使用大量數據。系統硬件結構如圖1所示。
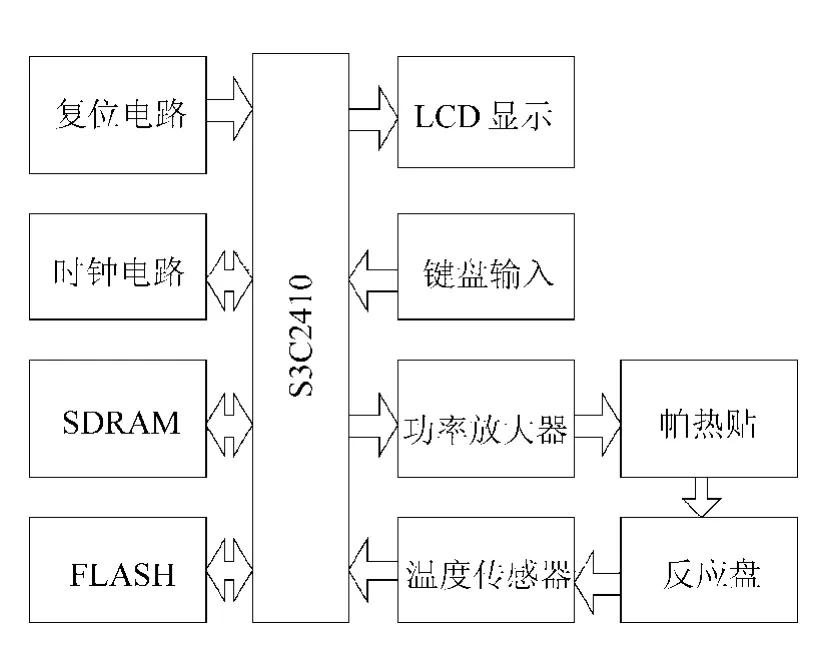
圖1 系統硬件結構圖
2 模糊自整定PID控制器的設計
2.1 輸入、輸出變量的論域及隸屬度函數
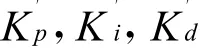
系統采用二輸入、三輸出的模糊控制器。控制系統的輸入偏差為e,偏差變化率為ec。模糊控制器的輸出為Δ Kp,ΔKi,Δ Kd[4]。模糊控制器與e,ec對應的輸入語言變量分別為E,Ec,E和Ec的論域取{-3,-2,-1,0,1,2,3},其模糊子集均為{NB,NM,NS,ZO,PS,PM,PB},分別表示{負大,負中,負小,零,正小,正中,正大}[5]。將模糊控制器的3個輸出變量Δ Kp,ΔKi,ΔKd的變化范圍分別定義為:

它們的模糊子集為ΔKp,ΔKi,Δ Kd={NB,NM,NS,ZO,PS,PM,PB}。
各語言值的隸屬度函數均采用三角形。E,Ec,Kd的隸屬度函數如圖2所示。
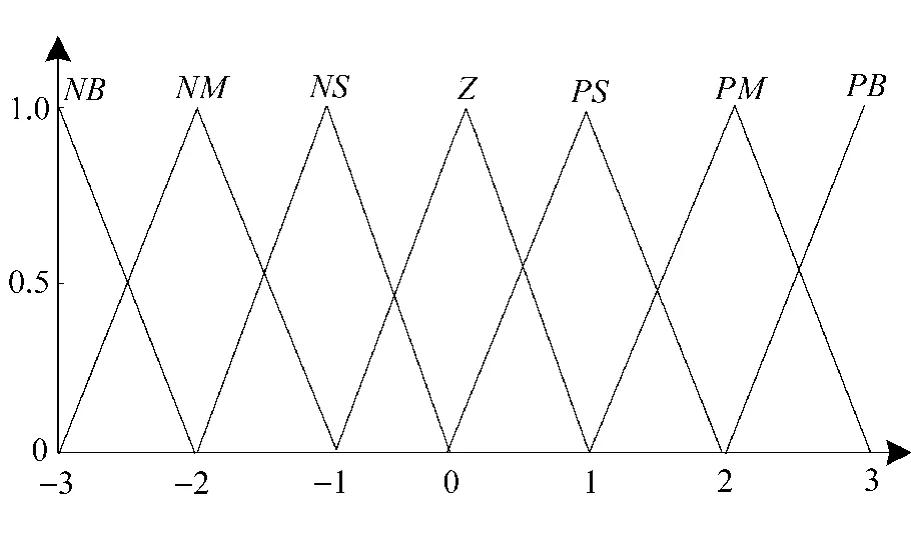
圖2 E,Ec,Kd的隸屬度函數
Kp,Ki的隸屬度函數如圖3所示。
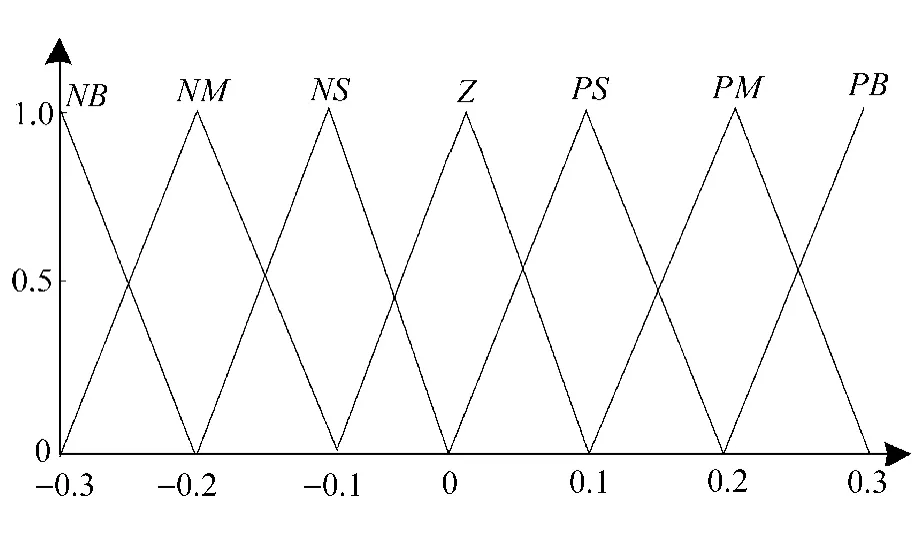
圖3 Kp,Ki的隸屬度函數
2.2 模糊控制規則表
模糊控制設計的核心是總結相關技術知識和實際調試經驗,建立模糊規則表[6],得到針對ΔKp,Δ Ki,Δ Kd這3個參數分別整定的模糊規則表,見表1~表3。
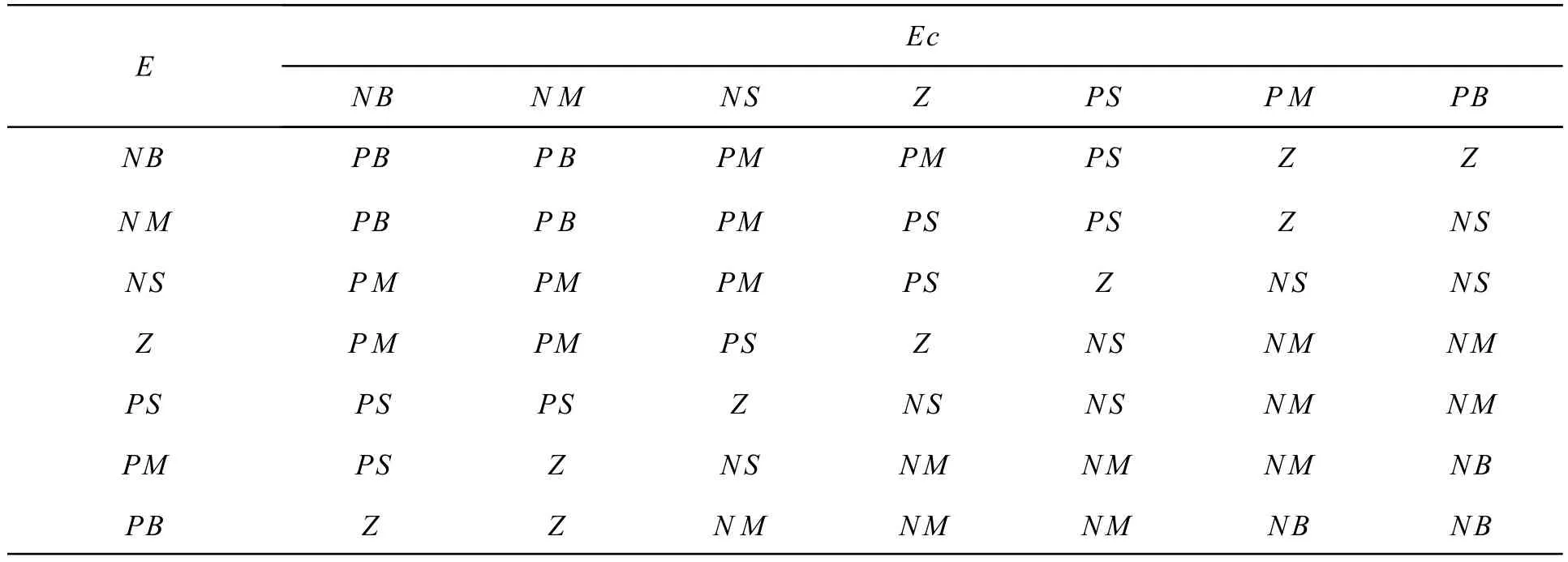
表1 ΔKp規則模糊表
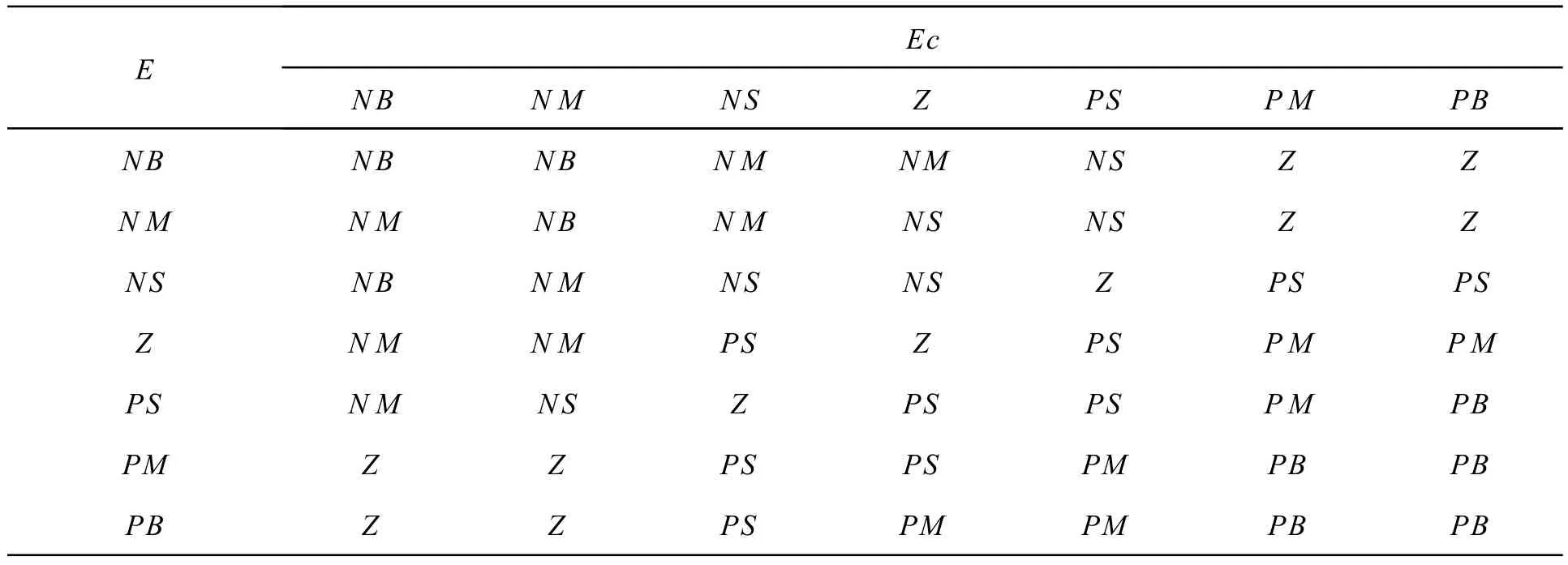
表2 ΔKi規則模糊表

表3 ΔKd規則模糊表
ΔKp,Δ Ki,Δ Kd——模糊控制器輸出值。
2.3 模糊控制查詢表
模糊控制查詢表是模糊控制算法的最終結果,根據上面的分析計算,文中所采用的模糊控制查詢表[8]見表4。
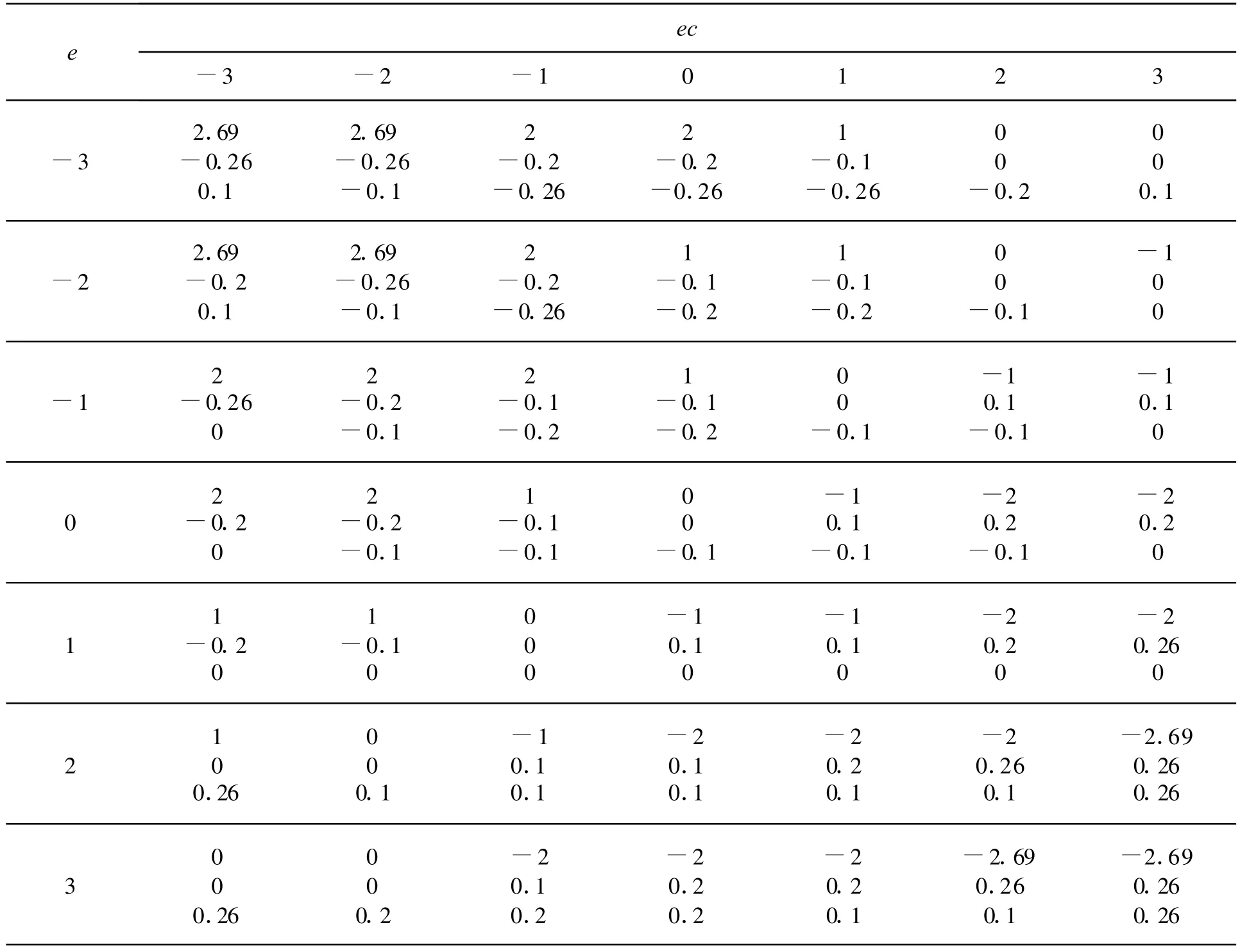
表4 模糊控制查詢表(ΔKp,ΔKi,ΔKd)
2.4 軟件設計
軟件平臺采用的是基于2.4內核的嵌入式Linux系統。采用交叉編譯器工具包CROSS2. 95.3.tgz。模糊 PID算法模塊的實現是通過MATLAB離線計算得到模糊控制表并存入ARM9中,然后通過查模糊控制表得到對應的控制量。最后再轉換為相應的PWM輸出量控制功率驅動模塊。
控制流程如圖4所示。
2.5 MATLAB仿真
選取被控對象為一階純滯后模型:

在MATLAB命令窗口運行Fuzzy命令進入模糊邏輯編輯器,選擇控制類型為Mamdani型,根據上面的分析分別輸入E,Ec,Δ Kp,Δ Ki,ΔKd的隸屬度函數和量化區間,并完成控制規則輸入。在SIMULINK中建立模糊自整定PID控制系統模型,如圖5所示。
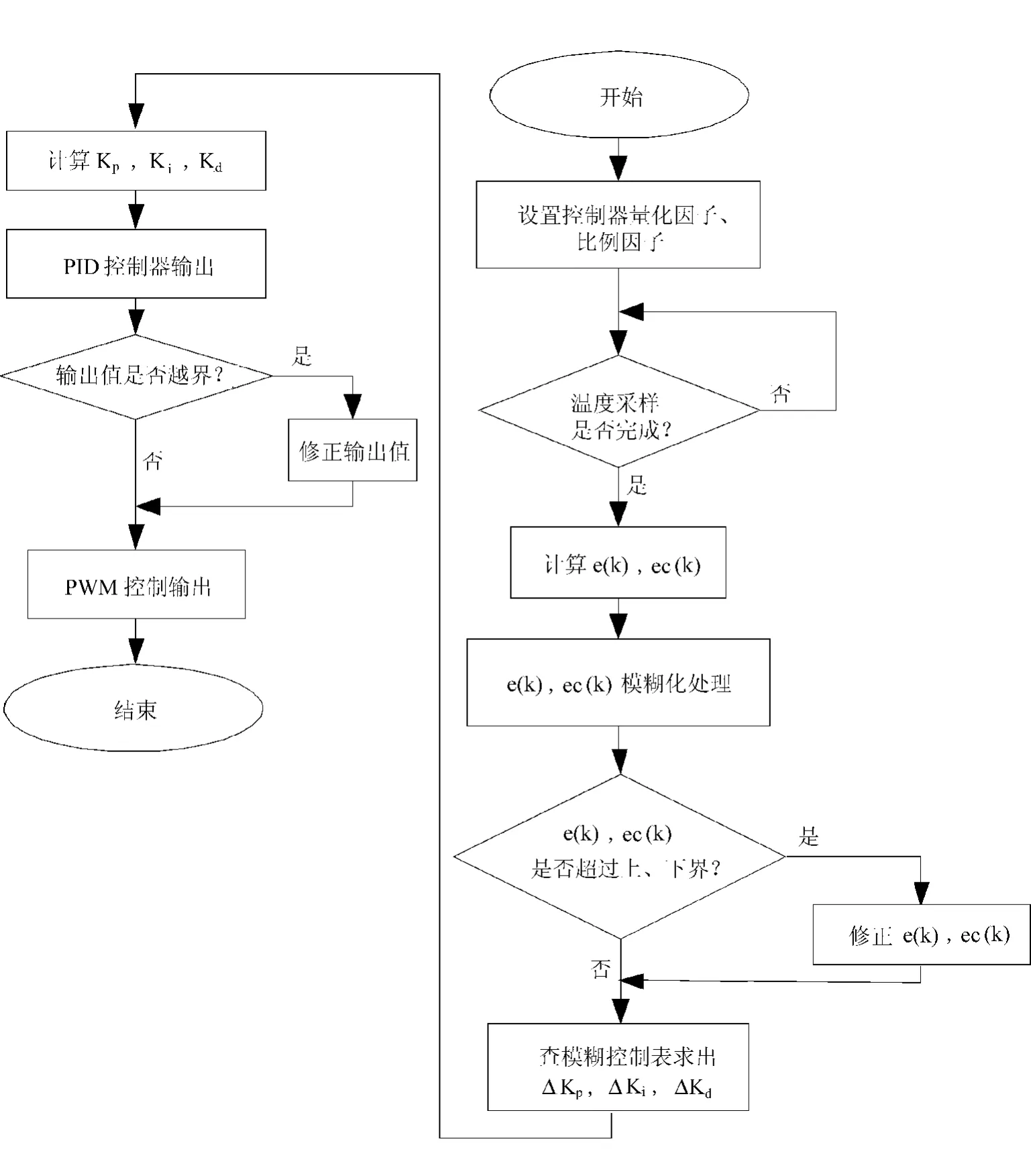
圖4 控制流程圖

圖5 模糊自整定PID控制系統模型的SIM ULINK構建
常規PID和模糊PID仿真結果如圖6所示。
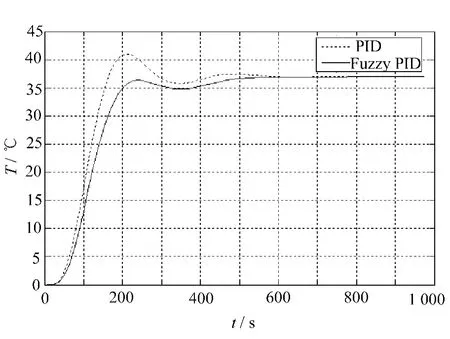
圖6 常規PID和模糊PID仿真
從仿真結果可以看出,模糊自整定PID控制具有較小的超調量和較小的調節時間,以及較好的動態響應特性和穩態特性,且同步精度高。
3 結 語
著重研究了基于ARM9的模糊自整定PID控制算法在生化分析儀溫度控制系統中的應用。仿真及實驗結果表明,模糊自整定PID控制是一種設計簡單、實現方便、控制規則優化以及性能優良的智能控制器,具有動態性能好、穩態精度高的特點,并且有較好的抗干擾性能和較好的魯棒性。實際應用中,使生化分析儀反應盤控溫精度達到±0.1℃,顯示精度為±0.01℃,控制效果優化明顯。
[1] T C Callai,J E S Santos,R R Sumar,et al.Applying the potentiality of using Fuzzy logic in PID control design[J].Advances in Soft Computing,2005,1:193-204.
[2] 諸靜.模糊控制理論與系統原理[M].北京:機械工業出版社,2005.
[3] Taifu Li,Yingying Su,Bingxiang Zhong.Remodeling for Fuzzy PID controller based on neural networks[J].Fuzzy Information and Engineering(ICFIE),ASC 40,2008:20(13):3431-3435,3444.
[4] 李國勇.神經模糊控制理論及應用[M].北京:電子工業出版社,2009.
[5] 葉潤玉.鍋爐主汽溫自適應模糊PID控制[J].機電技術,2008(3):44-46.
[6] Kevin M Passi.Stephen Yurkovich.Fuzzy control [M].Beijing:T singhua University Press,2001.
[7] 黃樂天,謝意.實用高精度智能恒溫加熱器系統設[J].微計算機信息,2005,21(10):70-71.
[8] 宋立芳,張永立.基于預測的模糊自整定PID溫度控制系統[J].科學技術與工程,2006,14(6):2142-2143.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
鐵道通信信號(2018年2期)2018-04-18 12:18:23
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(2017年9期)2017-09-26 03:41:45
電鍍與環保(2016年3期)2017-01-20 08:15:32
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
