振動環境中相機位置坐標與姿態角解算的實驗研究
2011-04-17 10:34:58張征宇周桂宇黃詩捷
實驗流體力學 2011年3期
張征宇,羅 川,孫 巖,周桂宇,黃詩捷
(1.中國空氣動力研究與發展中心 空氣動力學國家重點實驗室,四川 綿陽 621000;2.西南科技大學信息工程學院,四川綿陽 621000)
0 引 言
風洞試驗是飛行器氣動布局設計不可缺少的環節。為了提高試驗數據的精、準度,需獲取模型變形測量數據。國外有的風洞(如歐洲的DNW、NLR)即使在模型變形量未超過試驗規范要求時,依然測量模型變形,修正試驗數據以提高試驗數據精度[1-3]。
美國從20世紀80年代開始研究模型變形視頻測量(VMD)技術[1-4],現已應用于各種低速、高速、超高速風洞模型的運動軌跡、變形和姿態角的測量[3-4]。
國內高速暫沖式風洞振動較歐美連續式風洞大,導致VMD相機的位置與姿態隨著洞體振動而動態變化大。因此,從描述相機、像點、模型待測點三點數學關系的共線方程可知:從VMD的相片信息中準確確定相機位置與姿態角,對于振動環境中實現VMD測量至關重要[3-4]。
目前,相機位置坐標與姿態角求解主要有3種方法:基于直接線性變換(DLT)的解法、角錐法、光束平差解法[5-7]。其中,DLT因至少需要6個非共面控點,其實用性受到限制;角錐法主要用于為光束平差解法提供迭代計算的初值,計算精度沒有光束平差解法高。
為此,通過搭建的實驗平臺,研究角錐法、光束平差解法和空氣動力學國家重點實驗室建立的基于蒙特-卡洛法[8]的相機位置坐標與姿態角求解法,比較其在風洞試驗振動模擬環境中的解算效果,以建立適應我國風洞模型變形測量的相機位置坐標與姿態角解算方法。
1 風洞試驗的振動模擬實驗平臺設計
實驗目的:在風洞試驗的振動環境下,研究不同的相機位置坐標與姿態角解算方法的效果與穩定性,確定最適于VMD采用的相機位置坐標與姿態角解算技術。
實驗平臺采用的硬件如下:labworksR○的激振器2個(包括ET-126B-4規格的執行器2個,Pa-141規格的功率放大器2個)、DALSAR○相機2個(分辨率為400萬像素,成像幅面為17.4mm×12.8mm)、圖像采集電腦2臺、35mm定焦鏡頭2個、目標靶面一個以及編碼標記點,具體參見圖1。

圖1 風洞試驗振動環境模擬實驗平臺Fig.1 Experimental platform for simulating wind tunnel vibration
2.4 m跨聲速風洞試驗時的低頻振動峰值頻率在7Hz左右,因此,首先進行給定振幅為8mm、頻率為7Hz的正弦振動環境實驗,再進行振動頻率不超過10Hz的隨機振動環境實驗,相機曝光時間為5ms,以模擬雙相機在風洞試驗中的測量環境。
2 實驗研究的方案
2.1 測量原理
描述相機、目標靶面上編碼點及其像點三者關系的共線方程表達式如下:
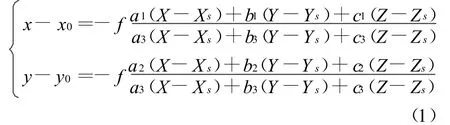
式中(x0,y0)分別為相機像平面中心,f為相機焦距, ()分別為相機在地面坐標系下的位置坐標, ()為相機姿態角(φ,w,k)所組成的旋轉矩陣R中的9個方向余弦,(x,y)與(X,Y,Z)分別為目標靶面上編碼點的像平面坐標與地面坐標系下的坐標。
因此,當已知3個以上的目標靶面上編碼點坐標,即可通過式(1)解得相機位置與姿態角參數。
2.2 實驗方案
(1)用三個控制點的角錐法[5-7]求得初值,分別代入基于蒙特-卡洛法的相機位置坐標與姿態角求解法和光束平差解法[5-7],其中基于蒙特-卡洛法的相機位置坐標與姿態角求解法,是指采用解非線性方程的蒙特-卡洛法[8],求解式(1)得到相機位置與姿態角參數;
(2)用未振動時相機的安裝位置與姿態角作初值,分別代入基于蒙特-卡洛法的相機位置坐標與姿態角求解法和光束平差解法;
研究采用傳統的6參數畸變[9-10]模型進行相機畸變校正,采用的相對誤差計算式為:

3 實驗數據與結果分析
正弦激振下左相機像片的相機位置坐標與姿態角解算結果的誤差如圖2所示,隨機振動下右相機像片的相機位置坐標與姿態角解算結果數據如表1所示,因激振頻率設定值低于10Hz,故表1與圖2中僅列出能夠描述一激振周期的10張照片,表中A-D的具體含義如下:
(A)表示三控制點的角錐法求解結果;
(B)表示將角錐法結果作為初值代入光束平差算法解得的數據;
(C)表示將角錐法結果作為初值代入基于蒙特-卡洛法的相機位置坐標與姿態角求解法解算的數據;
(D)表示將相機未振動時的位置參數作為初值代入光束平差算法所得的數據,其中左相機坐標為(-407.3525,-165.1383,1873.696),姿態角為(0.2150157,0.1209951,-0.130937);右相機坐標為(-289.3503,80.00066,1984.518),姿態角為(0. 163873,-0.05584956,-0.1130597)。
圖2與表1中的測量實驗結果表明:
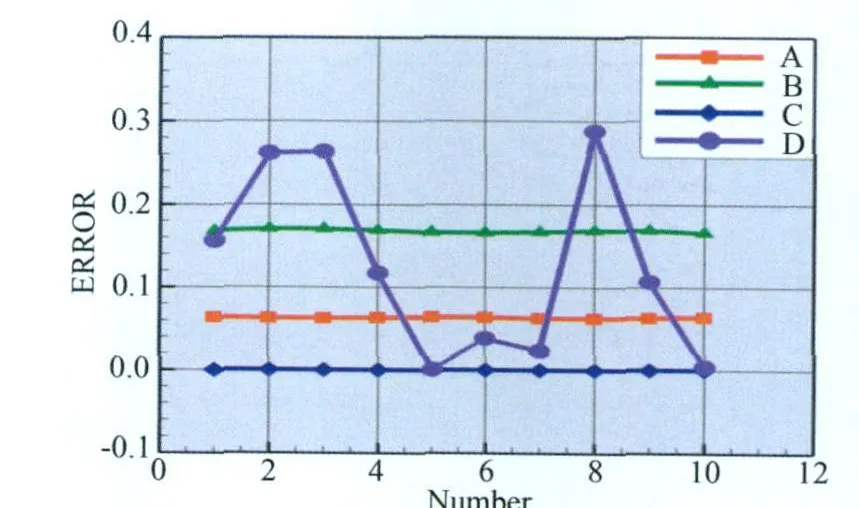
圖2 正弦振動下左相機的位置與姿態參數解算誤差Fig.2 Errors of left camera orientation in sine vibration

表1 隨機振動下右相機的位置與姿態參數解算數據Tabel 1 Exterior orientation of right camera in random vibration

表2 使用蒙特-卡洛解算結果為初值的光束法解算數據表(左相機正弦振動)Tabel 2 Exterior orientation using bundle method with Monte-Carlo solution input(left camera in sine vibration)
(1)角錐法在兩種振動狀態下均能得到結果,但其相對誤差在6%左右。
(2)基于蒙特-卡洛法的相機位置坐標與姿態角求解法在以角錐法結果和相機初始位置為初值時均能收斂至正確的相機位置坐標與姿態角,實驗中最大的誤差為6.62E-8,求解穩定性最好。
(3)光束平差法在以角錐法所得結果為初值下收斂效果較差,由圖2和表1可以看出,由于角錐法初值相對誤差較大,代入光束平差法難以收斂至正確解;將相機初始位置與姿態值代入光束平差法,僅在某些時刻能收斂于正確解,如圖2序號1(此時未振動)、序號6和序號11,表1序號1(此時未振動)、序號11。
光束平差法對初值精度依賴較高的原因是:其采用數值計算理論中解非線性方程組的Newton法求解,即通過泰勒展開取一次項線化方程,然后求解改正數逐步迭代求解,當在真實解附近泰勒展開時,因二次及高階小項較小,線化時截斷誤差較小,此時能迭代收斂至正確解;若初始值偏離真實值太遠,舍去二次及高階小項后,線化時截斷誤差較大,導致光束平差法不收斂或收斂至局部最優解,這與數值計算方法的基本理論吻合:“當初值不夠準確時,New ton方法往往得不到正確解”。
角錐體法也采用數值計算理論中解非線性方程組的Newton法求解,當相機位置坐標的初值不準確時,同樣也導致迭代不收斂或收斂至局部最優解,導致其相對誤差較大(在6%左右)。
為驗證以上分析,如表2所示,將蒙特-卡洛法的相機位置坐標與姿態角求解結果代入光束平差算法,發現光束平差算法就能收斂到正確解(最大相對誤差3.39E-5);另一方面也驗證了基于蒙特-卡洛法的相機位置坐標與姿態角求解法的正確性。
如圖3所示,基于20張時序照片(即20次時序測量)的相機與支桿一起振動軌跡反映了正弦激振規律,其振動頻率在7Hz左右,由于支桿剛性的影響(如圖1所示本次實驗采用相機支桿較長較細),所以在x軸與y軸方向有晃動,由于設定振動在z軸方向,故z軸方向受支桿剛性影響較小,所以能明顯看出其周期性,而在 x軸與y軸方向相機位移的周期性不明顯,但是x軸最大位移與y軸方向基本相同;如圖4所示,在7Hz的正弦激振下,相機姿態角的變化基本符合正弦變化規律。如圖5與6所示,相機與支桿一起振動軌跡無規律,其軌跡響應符合設定的隨機激振方式。上述分析表明基于蒙特-卡洛法的相機位置坐標與姿態角求解法結果與振動設定的激勵方式相符。
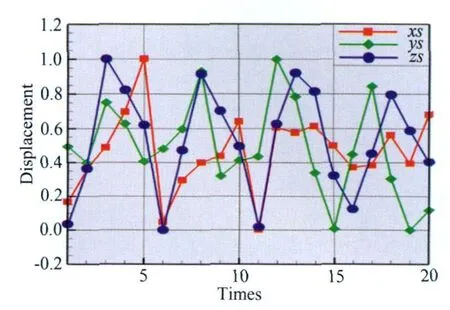
圖3 正弦激振下左相機位置的當量位移圖Fig.3 Normalized displacements of left camera in sine excitation

圖4 正弦激振下左相機姿態角的當量角位移圖Fig.4 Normalized angular displacements of left camera in sine excitation
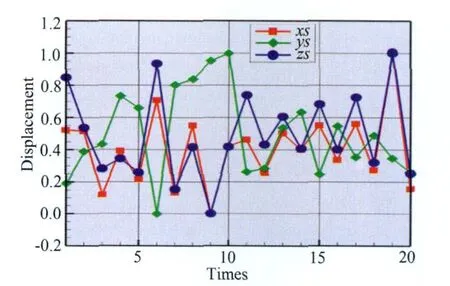
圖5 隨機激振下左相機位置的當量位移圖Fig.5 Normalized displacements of left camera in random excitation
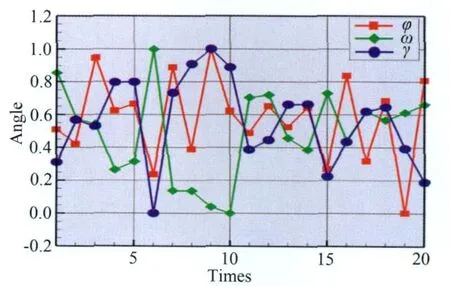
圖6 隨機激振下左相機姿態角的當量角位移圖Fig.6 Normalized angular displacements of left camera in random excitation
4 結 論
建立了高速風洞的振動模擬地面實驗平臺,對比4種相機位置與姿態角求解效果,發現:
①光束平差法對初始值精度依賴性較強,難以在振動環境的VMD測量中推廣;
②基于蒙特-卡洛法的相機位置與姿態角求解法對初始值精度依賴性最弱,求解穩定性最好,在振動環境中初始值相對誤差達到6.387%,其求解結果的相對誤差仍然保持在6.62E-8以內,最適于振動環境中VMD測量的相機位置與姿態角求解。
致謝:該研究得到中國空氣動力研究與發展中心高速所的大力支持,在此表示衷心感謝!
[1] LE SANT Y,MIGNOSI A,DELéGLISE B.Model deformation measurement(MDM)at Onera[R].AIAA 2007-3817.
[2] LIU T,BURNER A W,PAPPA R.Photogrammetric techniques for aerospace applications[R].AIAA 2008.
[3] DANNY A BARROWS.Videogrammetric model deformation measurement technique for wind tunnel applications [R].AIAA 2007-1163.
[4] LE Sant Y,MERIENNE M C,LYONNET M.A model deformation measurement method and its application on PSP measurements[R].AIAA 2004-2192.
[5] 馮文灝.近景攝影測量-物體外形與運動狀態的攝影法測定[M].武漢:武漢大學出版社,2002.
[6] 黃桂平,葉聲華,李廣云.數字近景工業攝影測量關鍵技術研究與應用[D].[博士學位論文].天津大學, 2005.
[7] 邾繼貴,葉聲華.基于近景數字攝影的坐標精密測量關鍵技術研究[J].計量學報,2005(7):207-211.
[8] 金 暢,夏尊銓.蒙特-卡洛方法中隨機數發生器和隨機抽樣方法的研究[D].[碩士學位論文].大連理工大學,2005(12):1-5.
[9] 武漢大學測繪學院.誤差理論與測量平差基礎[M].武漢:武漢大學出版社,2005.
[10]梁 晉,肖振中,唐正宗,等.大型飛機風洞變形測量的相機標定研究[J].西安交通大學學報,2009,(43):55-59.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
