8m×6m風洞特大迎角機構控制系統研制
2011-04-17 10:35:04陳天毅蔣鐵登郭守春楊孝松
實驗流體力學 2011年3期
周 平,陳天毅,王 帆,蔣鐵登,郭守春,沈 紅,楊孝松
(中國空氣動力研究與發展中心,四川綿陽 62100)
0 引 言
8m×6m風洞大迎角機構采用計算機控制液壓伺服油缸來實現試驗模型姿態變化控制,并完成所要求的各種運動控制功能。機構由7根油缸驅動,如圖1所示。偏航角由4根油缸(β1油缸組、β2油缸組)驅動實現,俯仰角α由兩根油缸驅動實現,Y向位移補償由一根油缸驅動實現。
β1油缸組(左、右各一根)與β2油缸組(左、右各一根)聯合協調運動控制來實現偏航角控制,并保證模型中心在水平面上的某一軸線上運動。俯仰角由α油缸組(俯仰臂下部左、右各一根)與Y向油缸聯合協調運動控制來實現俯仰變化控制,并保證模型中心沿著垂直平面上在某一軸線運動。當模型姿態角α和β同時要求變化控制時,7根油缸都要參與聯合協調控制,保證姿態角到位精度和模型中心在風洞試驗段規定的軸線上運動。
設計要求:角度位置控制精度優于±0.05°,可以無級設定角速度(大迎角Vmax=3°/s,常規迎角Vmax=1°/s)。控制系統具有可靠的模型保護與控制安全聯鎖功能。
設計要求模型姿態變化過程中,始終保持在試驗段規定“中心”軸線上運動,且這一軸線可通過軟件任意設定,以滿足特殊試驗需求。被控對象是一個典型的復雜的多自由度聯合協調控制系統。控制系統通過控制油缸的位移來實現對角度的控制,當角度按某以速度變化時,油缸將是非勻速運動。試驗模型所受的氣動負載,隨模型姿態角的變化及風洞運行工況的不同而變化,要求控制算法具有較強的自適應能力,以保證系統具有較高的控制精度。
1 控制系統硬件設計
1.1 控制系統硬件方案
圖2是控制系統硬件組成框圖。控制機構主要由PLC、上位機及現場手操器等組成。系統在風洞試驗管理機的調度指揮下完成機構的運行控制與安全聯鎖。PLC采用GE Fanuc 90-70 PLC,該類PLC運行速度快,功能模塊品種齊全,通信功能強易于組成各類網絡系統。PLC系統完成大迎角機構系統運動控制(實現控制算法)、油源運行控制及系統運行安全聯鎖,是控制系統的核心系統。
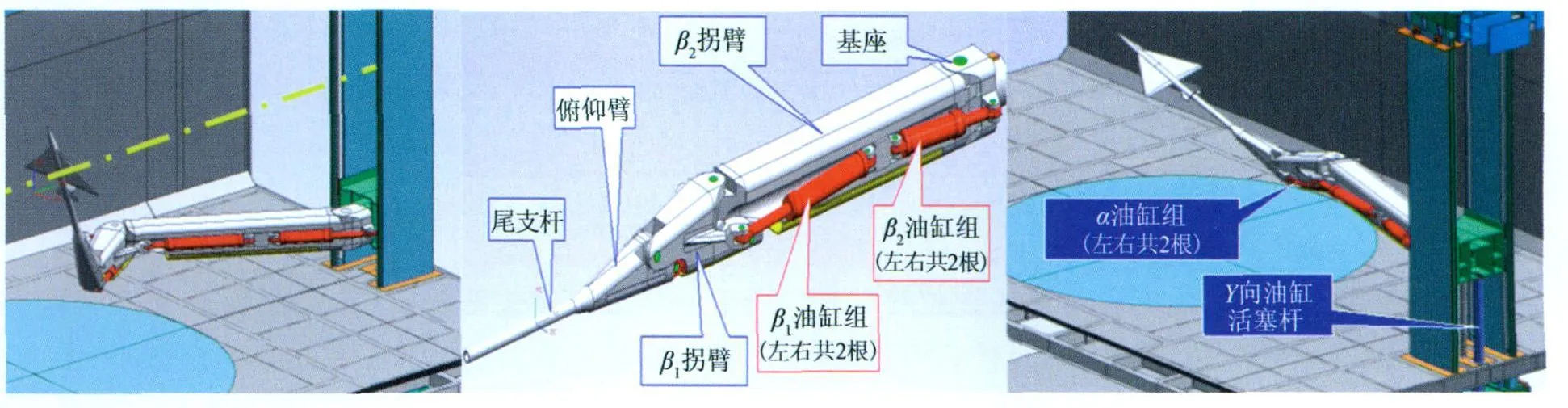
圖1 控制對象三維示意圖Fig.1 Schematic of the high angle of attack mechanism
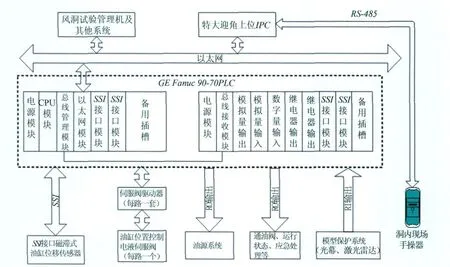
圖2 控制系統硬件框圖Fig.2 Block diagram of the control hardware system
機構控制系統上位機選用工控機。實現系統運行控制方式選擇、發出控制命令以及對來自PLC采集的狀態數據進行處理(顯示、記錄、分析)。
手持操作器選用掌上電腦,為現場(洞內)模型安裝機構控制操作方便而設置,具有對每個自由度獨立運動控制及緊急斷油保護模型等控制操作功能。
PLC與上位機及風洞試驗管理機工作于同一個局域網絡環境。PLC與上位工控機通過以太網進行通信。PLC根據上位機下達的各項任務,完成大迎角系統各類運行工況的運動控制、完成對油源的升/降壓運行控制及油源運行狀態監測,各種運行狀態監測數據通過網絡可以實時地傳送至上位機,并通過PLC程序將監測的狀態在控制操作臺上進行顯示。手持操作器的操作命令通過 RS-485傳至上位工控機,再由上位通過以太網絡傳至PLC,由PLC完成具體的控制。同時上位工控機可以監視手持操作器的操作,并可對手持操作器的控制操作權進行控制。
迎角系統驅動油缸的位移傳感器采用具有SSI數據傳輸功能M TS數字量輸出傳感器,PLC通過SSI采集傳感器數據,提高系統的抗干擾能力。
在液壓伺服驅動控制方面,采用一個伺服閥驅動兩個油缸的方式。即β1左右油缸、β2左右油缸及α兩個油缸各分別配一個伺服閥。整個機構共4個伺服閥驅動。
模型保護同時采用兩種方式來實現:通過軟件進行模型空間位置計算來防止觸壁;在風洞洞壁四周設置光幕與激光掃描雷達組合而成的安全保護“網”。
1.2 系統主要硬件配置
PLC主機架上配置有電源模塊、CPU模塊、總線傳輸模塊、以太網模塊、SSI接口模塊、模擬量輸入/輸出模塊、光隔開關量輸入及繼電器輸出模塊。
電源模塊選用IC697PWR711。CPU模塊選取IC697CPX935,布爾運算速度0.4ms/K,支持浮點運算。
總線傳輸模塊提供總線擴展接口和高性能并行編程器接口。
以太網絡控制器模塊支持MMS/SRTP數據傳輸協議,支持TCP/IP,傳輸速率10Mbps。
SSI接口模塊,用于接收來自于液壓缸位移傳感器的位置數據。該模塊與GE VMEbus(VME-I)兼容,支持單字SSI格式信號輸出的傳感器。
模擬量輸入模塊為IC697ALG230,每個模塊提供8路16位模擬量輸入通道,用于油壓信號的采集。
模擬量輸出模塊為IC697ALG320,每個模塊提供4路16位模擬量輸出通道。用于閉環控制輸出。
開關量輸入/輸出模塊,分別用于系統狀態的檢測,油源系統的控制等。
模型防撞壁保護的硬件系統采用德國施克(SICK)光電公司的激光掃描雷達和光幕。試驗段側壁頂部安裝一臺掃描雷達,在試驗段頂面的平面上快速掃描。在試驗段的兩個側壁和底面,采用三套安全光幕系統。
模型或機構接觸或超過雷達掃描平面或光幕時,給控制系統輸出一個報警信號。控制系統檢測到報警信號時,將自動切斷所有油缸油路,實現模型或機構的保護。
2 軟件開發
上位機開發軟件開發平臺為Windows 2000,軟件采用LabWindows/CVI6.0開發完成。上位機與PLC通信,利用GE公司Host Communication Toolkit軟件進行開發。
PLC軟件軟件開發工具為Cimplicity ME和C Programmer's Software。前者用于PLC程序開發,后者用于PLC程序開發的C語言編程軟件。
在上位機軟件開發方面,具有機構各自由度單動調試、聯動調試及吹風試驗等選擇功能。為確保模型安全,上位機還設計了試驗模型特征參數輸入界面,這些參數發給PLC,PLC程序實時計算模型空間位置,并發出告警或強行停止機構運行等安全保護聯鎖。
PLC是大迎角系統的控制核心機,負責實現大迎角機構的運動控制(單自由度運動控制算法、機構聯動運行控制算法、機構空間位置計算)及機構系統運行安全聯鎖;油源系統運行控制與運行聯鎖等。上位機界面涉及到的控制均由PLC軟件實現。
手持操作器——掌上電腦,應用軟件開發采用基于微軟VC6.0的Windows CE軟件開發工具包。現場手持操器可以實現四個自由度的獨立運動控制操作;各個角度位置值的實時顯示;應急控制等功能。
3 控制策略
控制策略主要包括:單自由度位置控制算法;負載補償控制算法;速度、位移生成算法;高精度單自由度智能角度補償控制算法;智能協調控制算法。
多自由度聯動采用跟隨協調控制[2-3],a與β之間的協調,采用β跟隨a的協調控制模式。Y與a之間,以Y跟隨a。在β內部以β2跟隨β1。
圖3是定β、變a控制實現框圖。該運行工況可分為12個控制算法模塊和7個速度、位移生成算法模塊。
“控制算法模塊1”主要完成a油缸位置系統的負載智能補償及高精度位置控制。a的“速度、位移生成算法”是根據a的給定及要求的速度算出a油缸的運動給定軌跡。
“控制算法模塊3”實現a角度高精度智能補償,確保角度定位精度。
根據a角度的實際位置及a的給定值,Y油缸位置系統的“速度、位移生成算法”模塊生成Y油缸的運動給定軌跡。
“β速度、軌跡生成及控制算法模塊5”實現β跟隨a,β抗負載智能補償及高精度位置控制。
“控制算法模塊8”、“控制算法模塊11”及“控制算法模塊12”分別實現β1角度、β2角度及β1和β1組成的β角度的高精度智能補償,確保角度定位精度。
控制算法模塊3、8、11、12四個算法模塊,均采用“智能高階PID”算法。協調跟隨采用了仿人智能控制算法[1-2]。
高階PID可用式(1)表示:


圖3 定β、變a控制框圖Fig.3 Block diagram of the control system(β Changed with αconstant)
仿人智能控制算法[2,4],由特征信息處理器和控制模態集組成。“特征信息”來源于角度誤差信息和操作信息兩部分。智能控制器的系統特征模型可用下式表示:

式中,Tm×n為m×n的矩陣,取值1或0。Qn×1為特征基元向量,通過調試結果總結形成,“Θ”為邏輯乘。
智能控制模態集可表示為:

由(2)和(3)式形成一一對應關系,通過(2)式計算出的特征信息,對應(3)式的控制模態集,得出相應的控制輸出。
由于篇幅有限,就不詳細介紹各算法模塊的具體實現。
4 結 論
該系統已用于風洞試驗,系統運行良好,并完成多項型號試驗任務。從最終結果看,機構的控制精度優于±0.008°,超過了設計指標±0.05°的要求。
表1是定β(β=20°)步進變a控制系統獲得的控制數據。
8m×6m特大迎角機構控制系統采用了以GE 90-70PLC為核心控制機的硬件結構。該類PLC系統抗干擾力強,模塊豐富,運算速度快,可擴展性強。本系統采用了基本的硬件系統,通過軟件成功地實現了多自由度系統協調聯動控制,解決了聯動協調控制算法可能導致自由度之間的耦合問題,以及解決了負載對控制品質的影響等難題。最終達到的控制指標優于設計要求。

表1 定β(β=20°)步進變α(Vα=3°/s)控制效果(單位:度)Table 1 Control result of the position of attack angle(αstep Changed with β=20°)
[1] 周 平,王 帆,蔣鐵登,等.8m×6m風洞特大迎角機構控制系統研制[R].全國空氣動力測控技術交流會(五屆二次)[C].廣西北海2006,09.
[2] 周 平,李尚春,韓 杰,等.智能控制在2.4m風洞同步協調控制系統上的應用[J].流體力學試驗與測量,2002,16(3):68-72.
[3] 施光林,史維祥,李天石,等.液壓同步控制及其應用[J].機床與液壓,1997,(3):3-7.
[4] 李士勇.模糊控制?神經控制和智能控制論[M].哈爾濱工業大學出版社,1996.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
