運行工況對電力系統(tǒng)穩(wěn)定器PSS現(xiàn)場參數(shù)整定影響的研究
2011-05-29 03:47:56吳跨宇陳新琪
浙江電力 2011年3期
吳跨宇,陳新琪
(浙江省電力試驗研究院,杭州 310014)
隨著電力系統(tǒng)規(guī)模的不斷擴大,尤其是大量遠(yuǎn)距離大容量輸電的超高壓、特高壓線路的投運,導(dǎo)致電力系統(tǒng)頻繁出現(xiàn)低頻振蕩問題,制約了輸電容量和距離,降低了電力系統(tǒng)穩(wěn)定性。在發(fā)電機勵磁控制器中附加電力系統(tǒng)穩(wěn)定器(PSS),是解決電力系統(tǒng)低頻振蕩問題最成熟有效和經(jīng)濟可行的方法。
目前PSS參數(shù)普遍采用現(xiàn)場整定,整定方法已經(jīng)相對成熟。然而進(jìn)行PSS整定試驗和參數(shù)計算時,由于試驗工況和條件的限制,無法全面模擬各種可能出現(xiàn)的PSS運行工況。試驗工況的不同,會導(dǎo)致PSS參數(shù)整定的差異,進(jìn)而可能導(dǎo)致PSS難以全面覆蓋要求的頻段,不良的PSS參數(shù)甚至?xí)趸囟l段內(nèi)的阻尼。試驗工況不同對PSS參數(shù)整定的影響雖然在《電力系統(tǒng)穩(wěn)定器整定試驗導(dǎo)則》[1](以下簡稱導(dǎo)則)中有相應(yīng)規(guī)定約束,但是在以往的整定試驗過程中并未得到量化考慮。因此,通過仿真來量化分析和總結(jié)運行工況對PSS參數(shù)整定的影響,提出對策就顯得非常必要。
1 PSS原理與整定試驗方法
1.1 PSS工作原理簡述
PSS是發(fā)電機勵磁系統(tǒng)的一個附加控制,它的控制作用通過AVR的調(diào)節(jié)實現(xiàn)。PSS通過轉(zhuǎn)速偏差Δω、功率偏差ΔPe、頻率偏差Δf中的1~2個信號作為輸入,采用超前滯后環(huán)節(jié)來補償勵磁系統(tǒng)和發(fā)電機時滯,產(chǎn)生圖1中所示的與Δω同軸的附加轉(zhuǎn)矩來增加系統(tǒng)阻尼,抑制系統(tǒng)低頻振蕩,提高電力系統(tǒng)穩(wěn)定性,增加系統(tǒng)功率輸送能力。
圖1中,快速勵磁產(chǎn)生的轉(zhuǎn)矩ΔTE在Δδ軸上產(chǎn)生正的投影,即正的同步轉(zhuǎn)矩,但容易在Δω軸上產(chǎn)生負(fù)的投影,即負(fù)的阻尼轉(zhuǎn)矩。正確整定后PSS產(chǎn)生的附加轉(zhuǎn)矩ΔTPSS則在Δω軸上產(chǎn)生較大的正阻尼轉(zhuǎn)矩,在Δδ軸上產(chǎn)生較小的同步轉(zhuǎn)矩。可見,合成后轉(zhuǎn)矩ΔTE有了正的阻尼轉(zhuǎn)矩和更大的同步轉(zhuǎn)矩,從而抑制發(fā)電機由于阻尼轉(zhuǎn)矩不足產(chǎn)生的振蕩失步和同步轉(zhuǎn)矩不足產(chǎn)生的滑行失步。

圖1 AVR及PSS產(chǎn)生的轉(zhuǎn)矩
加速功率型PSS采用發(fā)電機電氣功率和轉(zhuǎn)速信號作為輸入,可以很好地抑制有功功率快速變化時無功功率的波動[2]。其陷波器環(huán)節(jié)還能用于阻隔發(fā)電機轉(zhuǎn)子軸系扭振信號,目前在大型同步發(fā)電機勵磁系統(tǒng)中得到大量應(yīng)用。
1.2 電力系統(tǒng)穩(wěn)定器現(xiàn)場整定方法
現(xiàn)場PSS參數(shù)整定試驗中,最重要的是測量勵磁系統(tǒng)無補償頻率響應(yīng)特性,其測量方法如圖2所示。

圖2 勵磁系統(tǒng)無補償頻率特性測量
動態(tài)信號分析儀產(chǎn)生特定頻段的掃頻正弦或白噪聲信號疊加到電壓給定端。分析儀通過計算工程上用于替代發(fā)電機有功功率的機端電壓相對于輸入信號的頻率響應(yīng)特性,得到勵磁系統(tǒng)無補償頻率響應(yīng)特性(以下簡稱滯后特性)[3]。然后通過計算相位補償環(huán)節(jié)時間常數(shù)來得到滿足導(dǎo)則要求的PSS+AVR有補償頻率響應(yīng)特性。可見,勵磁系統(tǒng)滯后特性測量結(jié)果直接決定了PSS的參數(shù)整定。以下通過各種運行工況下的勵磁系統(tǒng)無補償頻率響應(yīng)特性仿真,分析運行工況對滯后特性及PSS參數(shù)整定的影響方式和程度。
2 勵磁系統(tǒng)運行工況的影響
2.1 仿真系統(tǒng)概況
仿真基于PSASP電力系統(tǒng)分析綜合程序進(jìn)行,系統(tǒng)采用4臺發(fā)變組共母線帶2條500 kV出線后連接至無窮大系統(tǒng)的基礎(chǔ)拓?fù)洹F啺l(fā)電機額定容量733 MVA,額定有功660 MW,額定電壓20 kV,仿真采用實測自并勵勵磁模型和參數(shù)。仿真基礎(chǔ)工況為發(fā)電機有功660 MW,發(fā)電機無功30 Mvar,調(diào)差系數(shù)Xc=-0.08。
2.2 分別采用Eq′和Ut反饋的滯后特性差別
根據(jù)單機對無窮大系統(tǒng)的線性化模型Phillips-Heffron的描述,PSS的輸出經(jīng)過勵磁系統(tǒng)放大輸出成勵磁電壓后,再經(jīng)過發(fā)電機轉(zhuǎn)子繞組后才在氣隙中產(chǎn)生附加轉(zhuǎn)矩。真正代表這一附加轉(zhuǎn)矩的電氣量為Eq′。但在實際現(xiàn)場試驗時,Eq′幾乎無法測量,工程上常用發(fā)電機機端電壓Ut來代替Eq′作為滯后特性測量的反饋[3],然而,Eq′和Ut對測量輸入的響應(yīng)特性并不完全一致。
在PSASP中首先進(jìn)行給定運行方式下的潮流計算和暫態(tài)穩(wěn)定計算,再調(diào)用小干擾穩(wěn)定計算模塊。其中的算法及功能選擇線性化頻域響應(yīng)計算,輸入信號對應(yīng)勵磁模型中的Vs,即AVR中的PSS信號疊加點,輸出信號選擇對應(yīng)發(fā)電機模型下的Vt或Eq′,分別代表發(fā)電機機端電壓和發(fā)電機暫態(tài)電勢。計算完成后選擇線性化頻域響應(yīng)輸出,可選擇直接曲線輸出或者Excel報表輸出方式獲取計算結(jié)果的原始數(shù)據(jù)。以下的仿真結(jié)果圖均采用Excel報表輸出數(shù)據(jù)經(jīng)與橫坐標(biāo)合成后繪制。Eq′和Ut對測量輸入的響應(yīng)特性仿真結(jié)果如圖3所示。

圖 3 Eq′/Us和 Ut/Us特性差別
由圖3可見,Eq′/Us和Ut/Us特性最大的區(qū)別在本機振蕩頻率點附近。Eq′/Us特性基本為一平滑過渡曲線,而Ut/Us特性則在本機振蕩頻率點有明顯下跳。因此,在根據(jù)Ut/Us特性整定計算時,對于導(dǎo)則要求的補償范圍-80°~-135°通常在下限處難以滿足。如果沒有充分認(rèn)識到兩者特性的差異,一味追求滿足-80°~-135°范圍,則很容易出現(xiàn)整定后的PSS補償特性過度超前,不利于低頻段阻尼特性,并會削弱同步轉(zhuǎn)矩。同時也容易出現(xiàn)兩級超前滯后無法滿足補償要求,不利于后續(xù)的模型轉(zhuǎn)換。因此在低頻段滿足小于-80°時,如果在本機震蕩點附近超過-135°,但2 Hz附近又進(jìn)入補償要求范圍的,可以認(rèn)為Eq′/Us已經(jīng)進(jìn)入-80°~-135°的補償要求。
另外,總體上Eq′/Us的滯后角度在0.2~1 Hz頻段內(nèi)要略微大于Ut/Us,最大角差接近10°。因此,如果為了滿足中高頻段補償需要,根據(jù)Ut/Us相頻特性進(jìn)行的低頻段有補償特性略微大于-80°, 也可以認(rèn)為 Eq′/Us已經(jīng)滿足-80°~-135°要求。
2.3 調(diào)差設(shè)置對滯后特性測量的影響
進(jìn)行PSS參數(shù)整定試驗時,一般會控制發(fā)電機和勵磁系統(tǒng)遠(yuǎn)離各限制點運行。因此,能影響勵磁系統(tǒng)滯后特性測量的主要是勵磁控制主環(huán)中的參數(shù)。而勵磁控制主環(huán)中起決定性因素的PID參數(shù)和一些勵磁系統(tǒng)具備的內(nèi)環(huán)反饋環(huán)節(jié)[4],在投產(chǎn)試驗或者勵磁建模試驗時已經(jīng)根據(jù)相關(guān)標(biāo)準(zhǔn)要求調(diào)試整定。由于調(diào)差系數(shù)在進(jìn)行PSS參數(shù)整定試驗前調(diào)度部門往往還未正式下達(dá),而采用臨時整定值,因此調(diào)差系數(shù)是唯一直接進(jìn)入勵磁控制主環(huán)又容易被忽視的環(huán)節(jié)。
圖4可見,在調(diào)差系數(shù)Xc分別為0和-8%時,Eq′/Us和Ut/Us特性最大差別均出現(xiàn)在0.5 Hz附近,且最大角差接近20°,負(fù)調(diào)差帶來更大的滯后角。因此,在PSS參數(shù)整定時首先應(yīng)記錄和正確設(shè)置測量滯后特性時的調(diào)差系數(shù),有條件的應(yīng)該在不同調(diào)差系數(shù)下測量幾組滯后特性數(shù)據(jù)以備參考。在整定參數(shù)時則應(yīng)適當(dāng)考慮日后調(diào)差系數(shù)可能出現(xiàn)的變化方向,適當(dāng)調(diào)整補償角度偏超前或偏滯后,力爭調(diào)差系數(shù)出現(xiàn)可能的變化后,PSS還能在全頻段內(nèi)滿足補償要求。

圖4 不同調(diào)差系數(shù)下滯后特性差別
2.4 同廠其余機組PSS投退的影響
同母線發(fā)電機的PSS投入和退出情況下的勵磁系統(tǒng)滯后特性仿真如圖5所示。

圖5 同母線機組PSS投退的滯后特性差別
同廠同母線機組同時運行,在PSS投入時,系統(tǒng)應(yīng)具有更好的阻尼特性,然而仿真結(jié)果顯示,Eq′/Us和Ut/Us特性差別均很小。因此,在PSS試驗時,可以忽略其余機組PSS運行狀況的影響。
3 機組與系統(tǒng)運行工況的影響
3.1 機組有功功率的影響
導(dǎo)則規(guī)定,PSS參數(shù)整定試驗時機組有功功率應(yīng)大于80%額定有功功率。發(fā)電機在不同的有功功率運行點,其阻尼特性也有差別。發(fā)電機分別在額定和80%額定有功功率下的滯后特性差別如圖6所示。

圖6 100%和80%額定有功功率下的滯后特性差別
圖6中可見,在本機振蕩頻點以下,額定有功功率下的Eq′/Us特性滯后角要小于80%下的滯后角,在大于本機振蕩頻率點的頻段內(nèi),額定有功功率下的Eq′/Us特性滯后角反而要大于80%下的滯后角,且Ut/Us特性在本機振蕩點附近則出現(xiàn)了超過50°的大角差。這一特性決定了一般情況下,如果PSS參數(shù)整定試驗在額定有功功率下進(jìn)行且有補償特性能滿足-80°~-135°的范圍要求,則其它小于額定有功功率運行工況下也能滿足補償要求。
因此,PSS參數(shù)整定試驗應(yīng)盡量在接近額定有功功率的工況下進(jìn)行。如果因條件限制試驗機組無法達(dá)到額定有功出力,則在參數(shù)整定時應(yīng)適當(dāng)縮小-80°~-135°的補償范圍要求(例如-85°~-130°),以保證PSS在額定有功出力下能滿足補償要求。
3.2 機組無功功率的影響
導(dǎo)則規(guī)定PSS參數(shù)整定試驗時的機組無功功率應(yīng)小于20%額定無功功率。發(fā)電機在不同的無功功率運行點,其阻尼特性也有差別。發(fā)電機在30 Mvar(即約 9%額定無功功率)和 150 Mvar(即約47%額定無功功率)下的滯后特性仿真差別如圖7所示。

圖7 9%和47%額定無功功率下的滯后特性差別
圖7可見,總體上無功功率的影響小于5°,無功大,滯后角度偏小。但對Ut/Us在本機振蕩點附近影響較大,最大角差接近30°。因此,如果滯后特性是在無功功率很小的情況下測得,建議首先保證低頻段正確補償,以保證發(fā)電機運行在無功功率較高點時,低頻段仍能滿足小于-80°的要求。在此基礎(chǔ)上再考慮本機振蕩點大于-135°的補償要求。
3.3 機組機端電壓的影響
導(dǎo)則對PSS試驗時的發(fā)電機電壓無確定要求,由于PSS試驗時系統(tǒng)運行工況的不同,即使同廠同類型機組,試驗時機端電壓也會有差別。發(fā)電機電壓的大小會影響發(fā)電機轉(zhuǎn)子功角,進(jìn)而影響到阻尼特性。發(fā)電機相同有功功率和無功功率下,電壓分別為1 pu和0.95 pu的滯后特性仿真結(jié)果如圖8所示。
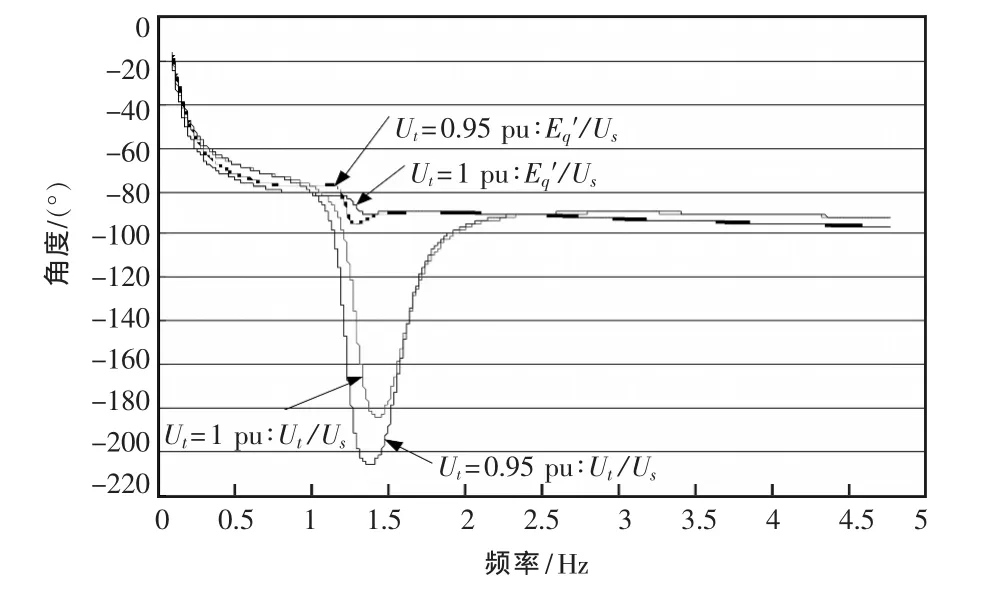
圖8 100%和95%額定電壓下的滯后特性差別
圖8可見,Ut/Us特性分別在高低頻段出現(xiàn)2次相交,因此測量得到的滯后特性可以認(rèn)為基本重疊,即電壓對特性影響可以忽略。但是Ut/Us在本機振蕩點附近的角差達(dá)到20°,電壓低滯后角度大。而Eq′/Us特性在低頻段有約4°的差別,在本機振蕩點后面的高頻段近乎重疊。因此,如果補償計算是對Ut/Us在本機振蕩點附近進(jìn)行平滑處理后進(jìn)行,機端電壓對滯后特性測量結(jié)果的影響可以忽略。
3.4 單機運行與全廠滿發(fā)的影響
同廠4臺機滿發(fā)和僅試驗機組滿發(fā)2種工況下的滯后特性仿真如圖9所示。

圖9 4機與單機滿發(fā)的滯后特性差別
圖9可見,總體上同母線機組的出力情況僅對本機振蕩點參數(shù)略有影響,因此,整定計算時可以忽略同母線其它機組出力情況。
3.5 電廠出線數(shù)量的影響
發(fā)電廠出線的數(shù)量直接影響到發(fā)電機與大系統(tǒng)的聯(lián)系電抗進(jìn)而直接影響到發(fā)電機功角,因此,出線數(shù)量必將明顯影響發(fā)電機阻尼特性。發(fā)電機分別在1條和2條出線情況下的滯后特性仿真如圖10所示。

圖10 1條和2條出線下的滯后特性差別
由圖10可見,出線數(shù)量即聯(lián)系電抗主要影響Eq′/Us在低頻段的特性,出線少的滯后角明顯更小,即低頻段阻尼更弱。因此,在進(jìn)行整定計算時出線數(shù)量高于本機振蕩點的頻段影響可以忽略。對于本機振蕩點以下的低頻段,如果出線數(shù)量比正常時少或有在建線路尚未投運的,補償可以偏超前,如果出線全部投運,則可以補償?shù)钠珳蟆?/p>
4 小結(jié)
上述仿真分析可見,對PSS參數(shù)整定時的滯后特性測量影響較大的工況主要有勵磁系統(tǒng)調(diào)差設(shè)置、發(fā)電機有功功率、無功功率和發(fā)電廠出線數(shù)量即系統(tǒng)聯(lián)系電抗。其它諸如同母線機組的出力、PSS的投退情況、發(fā)電機機端電壓等對滯后特性測量影響不大。
通過全面仿真分析和總結(jié)提出的各種運行工況對PSS整定計算影響的對策,可供勵磁和電力系統(tǒng)穩(wěn)定分析專業(yè)人員參考。正確整定投運后的PSS能在更廣的頻段范圍內(nèi)提供更大的附加阻尼,在機組和系統(tǒng)的各種運行工況下能更好地發(fā)揮作用。
[1]Q/GDW 143-2006電力系統(tǒng)穩(wěn)定器整定試驗導(dǎo)則[S].
[2]IEEE Std421.5-2005 IEEE Recommended Practice for Excitation System Models for Power System Stability Studies[S].
[3]竺士章.發(fā)電機勵磁系統(tǒng)試驗[M].北京∶中國電力出版社,2005.
[4]Q/GDW 142-2006同步發(fā)電機勵磁系統(tǒng)建模導(dǎo)則[S].
[5]方思立,蘇為民.電力系統(tǒng)穩(wěn)定器配置、構(gòu)成、參數(shù)計算及投運試驗[J].中國電力,2004,37(10)∶8-13.
[6]周雙喜,蘇小林.電力系統(tǒng)小干擾穩(wěn)定性研究的新進(jìn)展[J].電力系統(tǒng)及其自動化學(xué)報,2007,19(2)∶1-8.
[7]劉取.電力系統(tǒng)穩(wěn)定性及發(fā)電機勵磁控制[M].北京:中國電力出版社,2007.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
故事作文·高年級(2021年12期)2021-12-21 02:32:35
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
大電機技術(shù)(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(shù)(2015年5期)2015-12-10 05:52:30