基于定子諧波電流的六相永磁同步電動機雙電機串聯系統的仿真*
2011-06-02 09:54:38何京德劉陵順趙國榮
電機與控制應用 2011年6期
關鍵詞:系統
何京德, 劉陵順, 趙國榮
(1.海軍航空工程學院研究生管理大隊,山東煙臺 264001;2.海軍航空工程學院控制工程系,山東煙臺 264001)
0 引言
多相電機和普通三相電機相比,主要優點如下:無需器件并聯就可實現低壓大功率,轉矩脈動頻率增加、幅值減小,冗余結構提高了系統可靠性,直流電網側的諧波成分減少。但是,定子諧波電流過大是多相電機運行中的一個特有問題,如何對多相電機定子諧波電流進行抑制是多相系統的一個研究熱點。對此,文獻[1]提出了一種新型的電抗濾波器,如圖1所示,它類似于交流電機的定子繞組結構,使諧波電流在濾波器內產生旋轉磁場,對電機定子中的顯著諧波電流產生電抗,從而降低了這些諧波電流的幅值。本文進一步將電抗濾波器換成一臺電機,使諧波電流能夠驅動這臺電機運行,組成兩臺電機串聯的驅動系統,通過電流可控的電壓源逆變器向系統注入基波和諧波電流就可以同時控制這兩臺電機的轉矩,實現兩臺電機的獨立運行。本文以雙Y移30°六相永磁同步電動機(Permanent Magnet Synchronous Motor,PMSM)為研究對象,建立了其串聯驅動的數學模型,并進行了仿真分析。
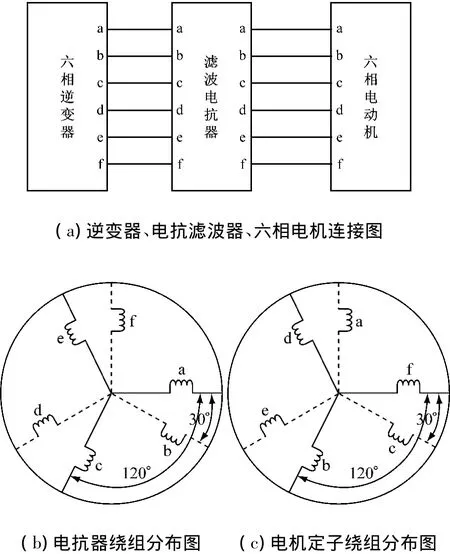
圖1 串入電抗濾波器的雙Y移30°六相PMSM系統
1 串聯驅動系統
考慮到電抗濾波器的繞組結構與雙Y移30°六相電機定子繞組結構相近,并且在六相電機中不產生旋轉磁場的6k±1(k為奇數)次諧波電流在電抗器中產生旋轉磁場,那么可以用一臺六相電機來替代電抗濾波器,使相應的諧波電流在這臺電機中產生旋轉磁場輸出轉矩,組成兩臺電機串聯的驅動系統。
1.1 兩臺雙Y移30°六相PMSM的串聯方法
將兩臺雙Y移30°六相PMSM的定子繞組按圖2所示的方法進行串聯[2-3]。使得在第一臺電機中產生旋轉磁動勢的基波電流和6k±1(k為偶數)次諧波電流在第二臺電機中不產生磁動勢,而在第一臺電機中不產生磁動勢的6k±1(k為奇數)次諧波電流在第二臺電機中產生旋轉的磁動勢,從而實現了兩臺電機在同一臺逆變器驅動下獨立運行。
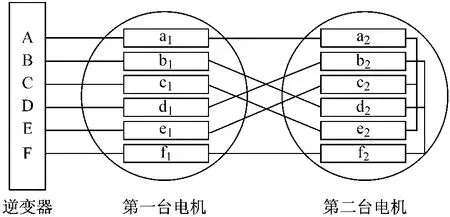
圖2 串聯驅動系統定子繞組的連接圖
1.2 矢量空間解耦理論
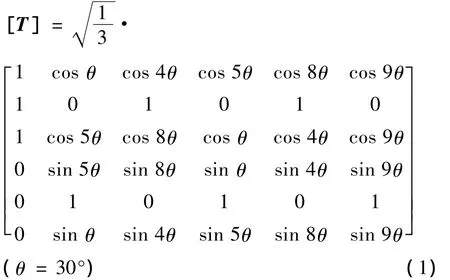
在對雙Y移30°六相電動機的研究時,通常引入廣義兩軸正交變換矩陣[T]將六相電壓和電流空間矢量投影到三個相互正交的兩維子平面α-β、x-y、o1-o2中去。其中,自然坐標系下電壓和電流的基波和6k±1(k為偶數)次諧波投影到αβ平面,6k±1(k為奇數)次諧波投影到x-y平面,零次和6k次諧波投影到o1-o2平面[4]。因此,在串聯驅動系統中,控制α-β平面的電壓、電流分量可以完成對第一臺電機轉矩的實時控制,控制x-y平面的電壓、電流分量可以完成對第二臺電機轉矩的實時控制。
經過廣義兩軸正交變換后的定子電壓方程中含有轉子的旋轉角θr,還需要通過實旋轉變換[R]消去θr,得到靜止坐標系下的數學模型。

式中:θr——電機的轉子角度。
2 串聯驅動系統的數學模型
從機電能量轉換的角度來看,雙Y移30°六相PMSM與兩相d-q正交繞組電機是等效的[4]。串聯驅動系統經過廣義兩軸正交變換和實旋轉變換得到靜止坐標系下的數學模型用如下方程描述。
電壓和電流方程:
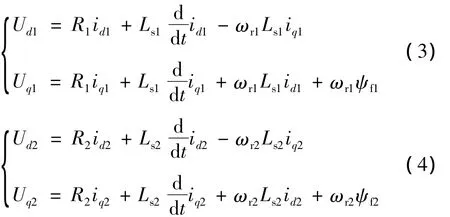
轉矩方程:

機械運動方程:
Ns1、Ns2——兩臺電機定子繞組匝數;
r1,r2——定子繞組電阻;
lls1,lls2——兩臺電機定子繞組的漏感;
lm1,lm2——兩臺電機定子繞組的勵磁電感;
φfm1,φfm2——兩臺電機永磁體磁路主磁通;
p1,p2——兩臺電機的極對數;
J1,J2——兩臺電機轉動慣量;
Tl1,Tl2——兩臺電機的負載;
F1,F2——兩臺電機軸摩擦系數;
ωr1,ωr2——兩臺電機轉子角速度。
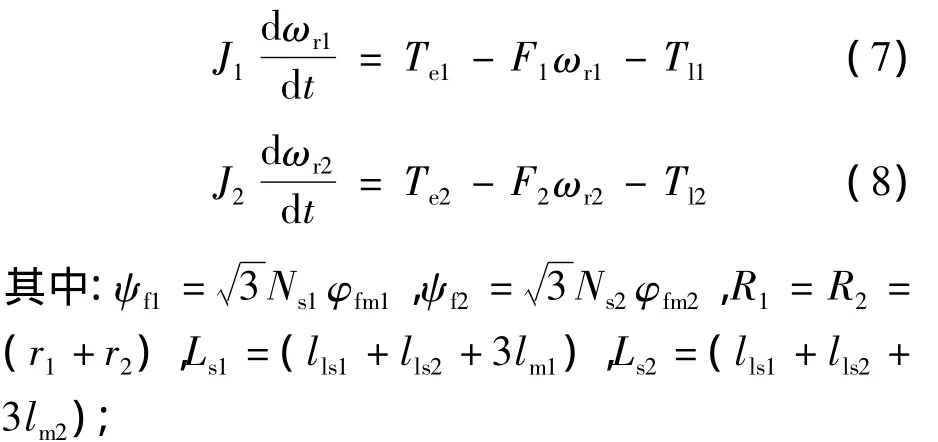
因此,由式(3)~式(8)采用MATLAB/Simulink很容易實現靜止坐標系下串聯驅動系統的仿真模型,如圖3所示。
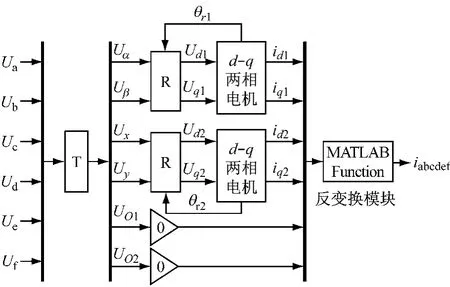
圖3 靜止坐標系下串聯驅動系統仿真模型
3 串聯驅動系統的仿真分析
根據靜止坐標系下串聯驅動系統的數學模型,利用MATLAB/Simulink軟件可以建立兩臺雙Y移30°六相PMSM串聯系統的仿真模型,電機采用id=0的矢量控制方法[5],逆變器采用電流滯環比較控制模式。電機參數設定如下:R1=R2=2.875 Ω,Ls1=8.5e - 3 H,Ls2=12e - 3 H,ψf1=0.175 Wb,ψf2=0.2 Wb,P1=P2=4,J1=0.089 kg·m2,J2=0.1 kg·m2,F1=0.005,F2=0.01,Tl1=Tl2=0,udc=300 V。
為了驗證串聯驅動系統中兩臺電機可以實現解耦控制,對系統的變速工況進行了仿真。首先讓電機1保持300 r/min,電機2在1 s時由靜止加速到500 r/min,兩臺電機的轉速、轉矩和逆變器a相電流的響應曲線如圖4所示;然后讓電機2保持在400 r/min,電機1在1 s時由靜止反向加速到-300 r/min,兩臺電機的轉速、轉矩和逆變器a相電流的響應曲線如圖5所示。
從仿真波形可以看出:在一臺電機正向加速、反向加速的情況下,系統中另一臺電機的轉速和轉矩都不受影響,可以獨立控制;電流滯環比較的控制模式可以使逆變器輸出電流與設定電流基本一致;串聯驅動系統具有較好的調速性能,因此串聯驅動系統可以實現電機的獨立控制。
4 結 語
圖4 電機1保持300 r/min,電機2在1 s時由靜止加速到500 r/min
本文在分析多相電機定子諧波電流的基礎上,研究了兩臺雙Y移30°六相PMSM的串聯驅動系統,該系統的優點是只需要一臺六相電流可控的電壓源逆變器即可對兩臺電機獨立控制,節省了逆變器的數量,在系統小型化方面顯示了較大的優越性。文中對系統的調速性能進行了仿真,通過仿真波形可以看出,串聯驅動系統中兩臺電機完全能夠獨立運行,且具有較好的調速性能。

圖5 電機2保持在400 r/min,電機1在1 s時由靜止反向加速到-300 r/min
[1]王鐵軍,辜承林,趙鏡紅.用于抑制多相異步電動機定子諧波電流的電抗濾波器[J].電工技術學報,2006,21(11):65-70.
[2]Emil Levi,Martin Jones.A novel concept of a multi phase multi-motor vector controlled drive system supplied from a single voltage source inverter[J].IEEE Trans on Power electronics,2004,19(2):320-335.
[3]Krishna Keshaba Mohapatra,Kanchan R S,Baiju M R,et al.Independent field-oriented control of two split-phase induction motors from a single six-phase inverter[J].IEEE Trans on Industrial electronics,2005,52(5):1372-1381.
[4]侯立軍,蘇彥民,陳林.六相異步電機的繞組結構及其仿真研究[J].中小型電機,2004,31(2):5-9.
[5]王成元,夏加寬,孫宜標.現代電機控制技術[M].北京:機械工業出版社,2009.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32