自動可視除草機器人系統設計
2011-06-07 03:50:58尹振波
湖南農業科學 2011年21期
吳 健,閆 磊,錢 樺,劉 廣,尹振波
(北京林業大學工學院,北京 100083)
國內外的大多數除草機器人都是采用噴灑除草劑的方式除草,對環境造成了一定污染,也增加了農藥殘留。因此,很多國家已經頒布法令明令禁止使用化學除草劑。而采用手扶式中耕機或牽引式除草設備除草,既耗時又費力。近年來,國內外的一些科研院所對除草機器人做了大量研究。如美國加州大學戴維思分校生物與農業工程系Slaughter教授的團隊介紹了除草機器人原型[1];德國農業專家采用計算機、GPS定位系統和多用途拖拉機綜合技術,研制出可準確施用除草劑的機器人,其特點是當機器人到達雜草多的地塊時,GPS接收器便會做出雜草位置的坐標定位圖,機械桿式噴霧器相應部分立即啟動進行除草劑的噴灑[2];南京林業大學陳勇教授等研制了一種除草機器人,由本體、多關節機械臂、末端執行器、雜草識別攝像頭和導航攝像頭組成[3-4],主要用于控制玉米行間雜草。
除草機器人應用于農業生產中已經相當普遍,而在林木苗圃生產中的應用卻不多見。筆者研制的除草機器人主要應用于林地苗圃,采用機械方式對苗圃行間的雜草進行清除。這種方式更加環保。結合國內外的相關研究,將機械式的執行機構安裝在機械臂端部,利用現有的機器視覺技術和多傳感器融合技術,提高識別的準確性和精確度,實現除草作業的智能化。
1 除草機器人系統
除草機器人系統設計可以分為機械結構設計和控制系統設計。機械系統設計分為行走機構設計和執行機構設計;控制系統設計包括硬件電路設計和控制算法的編寫。整個系統框圖如圖1所示。
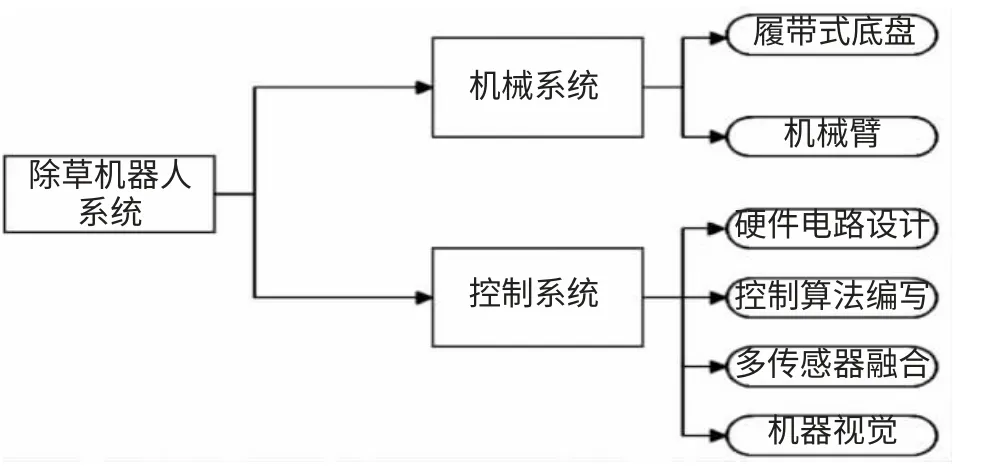
圖1 除草機器人系統框圖
2 除草機器人機械結構
除草機器人的外形如圖2所示,其構成主要有三個部分:移動機器人底盤、機械臂及除草執行機構、圖像處理系統和相關的定位傳感器。
2.1 移動機器人底盤
移動機器人的底盤一般分為:足式、輪式、履帶式和輪履式。除草機器人要在苗圃壟溝之間行走,由于壟溝間的距離較小(40 cm左右),且壟溝筆直平整,所以采用履帶式的底盤較適宜(圖3)。履帶式底盤寬度為30 cm,能保證其在苗圃壟溝中較穩定地通行。
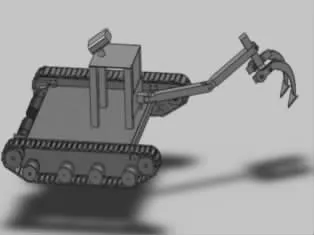
圖2 除草機器人三維設計圖
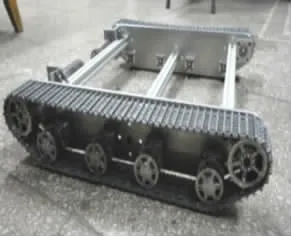
圖3 履帶式底盤
驅動輪在行走機構中的位置對履帶驅動區段的效率有著重大影響的。驅動方式一般分為前輪驅動和后輪驅動。前輪驅動的驅動區段較長,產生的摩擦力矩較大,履帶效率就會降低,同時也增加了履帶中零件的磨損,所以通常選擇后輪驅動[5]。驅動輪與電機之間通過聯軸器相連,這樣可以保證良好的越障性能,前輪為從動輪,中間的四個小輪則為支撐輪。
2.2 機械臂及除草執行機構
機械臂有2個自由度,由2個步進電機和若干連接件組成,可以實現空間內任意位置抓取,在機械臂手部安裝有除草的執行機構。在除草的執行結構方面,國內外有著很多研究,江蘇大學設計了一種可以進行株間與行間一體化除草的八爪式除草執行機構[6],機械式除草用得更多的是回轉的旋刀或是圓盤。但這種刀具相對來說結構比較復雜,在苗圃中并不實用。筆者設計所采用的執行機構為鏟狀刀頭,除草時刀頭深入土中10~15 cm,將雜草連根鏟除,從而達到較好的除草效果。圖4為除草執行機構的三維設計圖。
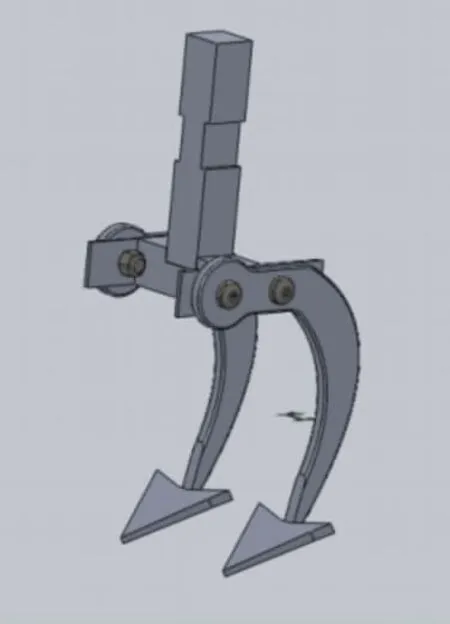
圖4 除草執行機構
3 除草機器人控制系統
為了滿足露天苗圃的除草作業工作,機器人的控制系統必須擁有強大的數據處理能力,進而完成自主行走、圖像處理等復雜工作。除草機器人的底盤和機械臂的控制是利用AVR ATMega128單片機進行控制的,圖像處理部分采用的核心芯片是DM6446,兩者之間通過串口通信。
3.1 底盤及機械臂控制系統
底盤和機械臂都是應用AVR ATMega128單片機進行控制。底盤由電機帶動,即用AVR ATMega128來控制電機轉速。采用MAXON電機,額定功率為70 W,經過變速器減速后的額定轉速為600 r/min,額定電壓為24 V。電機和AVR控制板之間裝有電機驅動器。電機驅動采用PWM技術,通過改變PWM波的占空比來改變電機的轉速。電機采用雙BTS7960大電流(43 A/68 A)H橋驅動,與單片機5 V隔離,能有效地保護單片機,其PWM最大頻率為25 kHz。由于苗圃路面條件較平整,所以選用開環控制器同樣可以符合要求,這樣的設計在一定程度上降低了成本。
在機械臂的兩個關節處都裝有步進電機,對機械臂的控制本質上就是對機械臂上的步進電機的控制,實現機械臂在空間范圍內各個方位的動作。對步進電機的控制同樣需要采用步進電機驅動器——ZD-6560-V3,其特點是高集成度和高可靠性。接口采用超高速光耦隔離,抗高頻干擾能力強,最高輸入電壓為DC 40 V,最高驅動電流為3.5 A。
3.2 機器視覺
機器視覺技術在國內外農林生產中有著廣泛的應用。在日本,農林機器人很多都應用圖像處理技術來識別農作物,并采用多傳感器融合的方式來提高執行的精度和效率。除草機器人的圖像處理模塊主要用于識別雜草,將處理后得到的雜草信息發送給執行機構,使得機械臂上的執行結構將雜草切除。圖像處理的核心芯片是DM6446(TI公司),采用達芬奇技術,即集成了可編程數字信號處理器DSP(Digital Signal Processor)內核以及ARM(Advanced RISC Machines)處理器內核的片上系統。
圖像通過CCD傳感器進行實時的圖像采集,對采集來的圖像信息通過DSP進行實時性處理,并將處理的結果再反饋給單片機,從而命令單片機控制機械臂進行指定的抓取作業。圖5為除草機器人的圖像識別和處理模塊,他是由一個攝像頭、DM 6446的開發板和一個40 G的移動硬盤組成的。CCD傳感器捕捉所拍到雜草圖像信息,并應用圖像分割算法將雜草從背景中提取出來,再通過圖像處理模塊實現除草機器人的智能作業,以提高工作效率。

圖5 圖像處理模塊
3.3 傳感器模塊
定位即機器人必須確定它在環境中的位置。機器人上安裝了超聲波傳感器和紅外傳感器,能準確的避障,使機器人能沿著苗圃的壟溝直線行走。北京林業大學錢樺教授團隊制作的噴霧機器人采用的是電子盤和紅外避障傳感器,在環境條件完全已知的情況下進行全局路徑規劃,在環境條件部分已知或全部未知的情況下進行局部路徑規劃[7-9]。該除草機器人底盤上裝有電子羅盤以確定機器人運動方向相對于地磁場方向的偏轉,獲取偏轉速度和偏轉角[10-11]。在底盤前后各有2個超聲波傳感器,在兩側各裝有4個紅外傳感器。傳感器能夠監測機器人周圍的信息,將信息傳遞給主控制板,從而自動調節PWM波占空比來改變電機的轉速,利用底盤的差速轉彎,實現避障功能。
4 結論
雜草是影響林木作物生長和導致苗圃產量與質量下降的重要原因。化學除草劑雖然可以控制雜草的生長,但除草劑本身對人體及其它生物產生了嚴重危害。而人工除草作業量很大,旨在設計一款小型基于機器視覺的自動除草機器人代替人工作業。該除草機器人用CCD傳感器進行實時圖像采集,通過S-video接口將圖像傳輸到圖像處理板,應用模式識別算法判別出苗圃中的雜草信息,并傳達指令給執行機構完成除草動作。該設計可初步實現智能化作業,提高苗木除草作業的效率。在以后的研究中,圖像處理算法將不斷改進,以提高作業的準確性,完全實現林業苗圃的智能化除草作業。
[1] Lee W S,Slaughter D C,Giles D K.Robotic weed control system for tomatoes[J].Precision Agriculture,1999,1(1):95-113.
[2] 趙 欣.智能機器人在農業自動化領域的主要應用[J].中國農業通報,26(10):360-364.
[3] 侯學貴,陳 勇,郭偉斌.除草機器人田間機器視覺導航[J].農業機械學報,2008,39(3):106-108.
[4] 郭偉斌,陳 勇.基于模糊控制的除草機器人自主導航[J].機器人,2010,32(2):204-209.
[5] 南京林產化工學院主編.內燃機與林用車輛理論[M].北京:中國林業出版社,1995.
[6] 周恩權,毛罕平,陳樹人.八爪除草機構的設計與實驗[J].農機化研究,2011,(2):62-65
[7] 杜利超,錢 樺,肖愛平.大棚噴霧作業機器人底盤的設計與研究[J].廣東農業科學,2010,37(5):196-197.
[8] 杜利超,錢 樺,肖愛平.大棚噴霧作業機器人的行為控制與路徑規劃[J].廣東農業科學,2011,38(1):185-188.
[9] 杜利超,錢 樺,肖愛平.路徑規劃技術及其在大棚作業機器人中的應用[J].湖北農業科學,2010,(5):1205-1208.
[10]郝昕玉,姬長英,Xin-yu,等.自主移動農用機器人導航系統故障診斷分析[J].江西農業學報,2010,(12):153-154,161.
[11]王 輝,程 雪,李玉霞.農業機器人應用進展初探[J].安徽農業科學,2009,(16):7674-7675.
猜你喜歡
科教新報(2022年22期)2022-07-02 12:34:28
今日農業(2021年5期)2021-11-27 17:22:19
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
高中生學習·閱讀與寫作(2019年2期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
現代農業(2015年5期)2015-02-28 18:40:49