基于公用電話網的閥門控制遠程診斷系統
2011-06-11 03:35:12王道順李芍君
大連交通大學學報 2011年5期
王道順,李芍君
(大連交通大學 機械工程學院,遼寧 大連 116028)
0 引言
在閥門智能控制系統中,要選擇閥門的開關驅動形式,控制閥門的開關動作方向,顯示閥門的開度變化,并在閥門達到全開、全關極限,驅動電機過扭矩、過熱的情況下報警等等,需要設置的參數很多.而用戶很可能因為某部分的參數設置不當,造成整個系統無法正常運行.這種情況下遠程診斷技術為我們提供了解決問題的有效手段.遠程診斷就是利用網絡,將遠程的用戶現場設備與本地的監控設備相連接,本地技術人員通過遠程診斷軟件,采集用戶現場設備的設置參數,并進行診斷.發現問題后,進行參數的修改或重新設置,再傳輸至用戶現場的設備中,或通知用戶檢查相關的硬件接線等,以此來完成設備的維護.這樣在設備出現問題時,通過信息交流而不是人員交流來解決問題,就大大減少了時間、資金、人力資源上的開銷,同時也提高了工作效率.
目前,公用電話網是實現遠程數據傳輸的最成熟、最便利、最廉價的方式之一,無需大規模布線,能夠提供多種數據傳輸服務[1];而且電話通信已進入程控交換時代,技術比較先進,速度快,容量大,在保證數據傳輸準確性的同時也能保證傳輸速度.
1 系統概述
我國的公用電話網采用的是FSK(頻移鍵控)制式[2],電話線上傳輸的是音頻信號,而單片機只能處理數字信號,需要通過調制解調器來完成數字信號和音頻信號的轉換.雙方通信開始之前,主機發出撥號命令,經MODEM處理后送到電話線上,向端局發出請求,請求與下位機連接.端局檢測下位機狀態,若為空閑給下位機振鈴信號,雙方電話線聯通,完成握手協議后即可進行數據傳輸.系統模型如圖1所示.
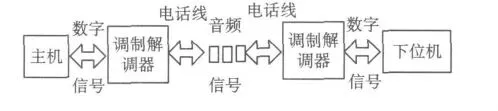
圖1 通信系統模型
2 硬件系統設計
本文設計的閥門控制診斷系統不光可以遠程診斷,還可以在現場進行設備的維修.在遠程診斷部分,主機為計算機,通過RS232與調制解調器相連,經由電話網連通下位機;在現場診斷部分,主機接RS232經過232/485轉換器轉為RS485,再由485轉化為可以與單片機連通的串口線,與單片機連接.硬件連接圖見圖2所示.
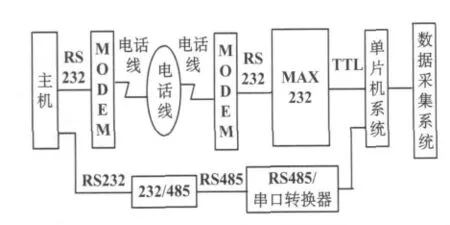
圖2 診斷系統硬件連接圖
2.1 單片機系統
本系統單片機采用AVR系列Mega16單片機,該單片機功能強大,內嵌A/D轉換器、EEPROM、模擬比較器、PWM定時計數器等多種功能;AVR單片機的I/O接口具有很強的驅動能力,灌入電流可直接驅動繼電器、LED等元件,從而省去驅動電路,節約了系統成本[3].
2.2 數據采集系統
根據系統要求,系統前端配置多路傳感器以探測閥門狀態信號,采集的模擬量均為變送器輸出的4~20 mA標準電流信號,采用電阻將傳感器采回的電流信號轉換為電壓信號供單片機采集.
由于本系統所需要檢測的現場數據很多,Mega16單片機自帶的8路模擬開關無法滿足要求,數據采集系統采用4片模擬選擇開關芯片CD4051開關實現對多達32路模擬信號的輸入,CD4051管腳圖見圖3所示.
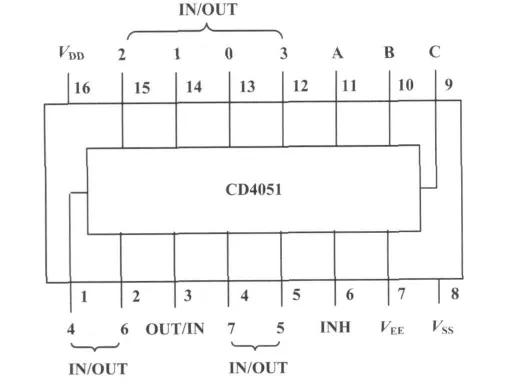
圖3 CD4051管腳圖
其中0~7為經處理后送入的電壓信號,6號管腳作為片選信號與Mage16的PB0相連,3號管腳作為輸出信號與Mega16的PC0相連.
2.3 電平轉換電路
在本系統中,單片機系統使用的是TTL電平,而MODEM端使用的是RS-232電平,兩邊使用了不同的電平機制,因此通信時,需要進行電平轉換.MAX232帶有兩組轉換電路,即可以同時把兩個TTL電平轉換為RS232電平,也可把兩個RS232電平轉換為TTL電平,所以只使用一個MAX232 就可以完成雙工通信了[4].MAX232 電平轉換應用電路見圖4所示.
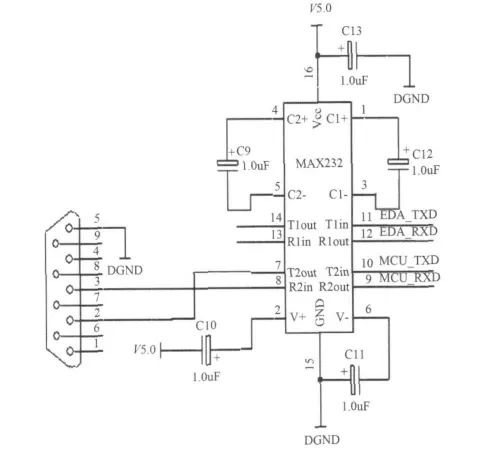
圖4 MAX232應用電路圖
2.4 遠程診斷系統
遠程診斷的范圍很廣:①軟件參數設置不當時,所有參數都可遠程更改;②對閥門控制系統中的各參數可單獨控制,以確定是否為設備故障.以驅動電機過扭矩為例,當遠程診斷出是驅動電機扭矩參數設置不當時,上位機就要向Mega16發送相應指令,Mega16根據接收到的指令來確認與驅動電機相連的單片機管腳狀態,完成對驅動電機扭矩的調整,從而恢復整個系統的正常運行,最大程度的減少停機時間.
2.5 現場診斷系統
本系統在設計過程中增加了現場診斷系統,使整個系統更加完善,不僅可以進行遠程診斷,而且還可以根據用戶需要現場更改軟件參數或診斷設備故障,大大提高了系統的通用性.現場數據經由RS485傳送,在上位機接受端,利用RS485/232轉換接口,將其變成 RS232信號供上位機使用[5].RS485與上位機的接口電路如圖5所示.
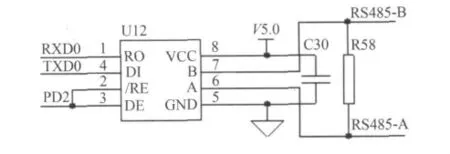
圖5 RS485與上位機接口電路
3 軟件系統設計
3.1 上位機部分
上位計算機的控制軟件部分利用Visual Basic軟件開發完成,VB界面友好,簡單易用,功能強大,實用性強在國內外得到廣泛應用[6].VB軟件提供數據串口通信控件MSCOMM,利用該控件提供的屬性設置,查詢和OnComm事件觸發功能,可以開發出各種通信程序.在VB中利用AT命令來對MODEM進行操作很簡便[7-8],例如撥號上位機只需要以下程序即可完成:
其中Number是要撥打的電話號碼.
閥門控制遠程診斷系統上位機界面圖6所示.
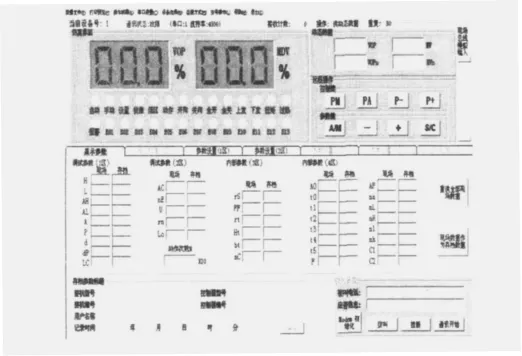
圖6 閥門控制遠程診斷軟件界面
本軟件啟動時,可以接收到下位機采集的現場數據,并在顯示參數區顯示出來由技術人員分析判斷是哪部分參數設置不當,并將判斷結果通過相應指令傳達給下位機,控制下位機動作,以完成設備的維護.
3.2 下位機部分
下位機程序需要完成兩個功能,一是把現場接受到的數據串行發送到主機;另一個是并行接受工作現場的模擬數據,經A/D轉化后變為可為單片機識別的數字信號.本文中給出這兩個過程的主要流程圖7,圖8所示.
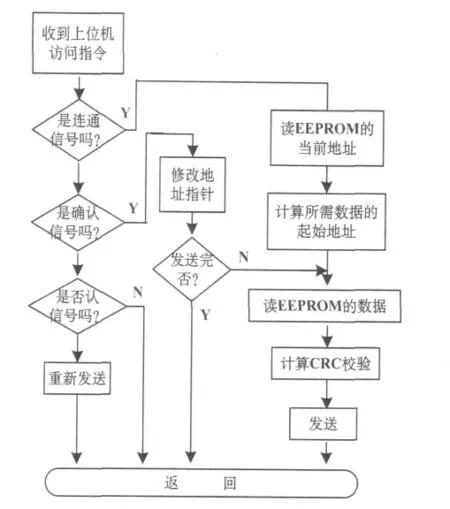
圖7 下位機串行發送數據流程圖
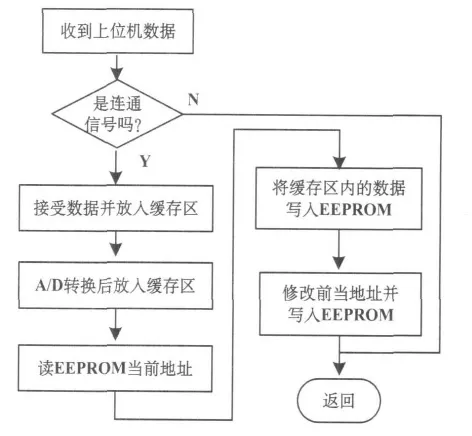
圖8 下位機并行接受數據流程圖
4 結論
本文設計的遠程診斷系統,在實際應用過程中,只要不是設備本身出現了必需返廠維修的硬件故障,出現問題后幾乎都能得到有效的解決.僅差旅費一項,就為企業節約了大量資金.當然,同時在時間、人力資源上都有很大的節約.由于為用戶提供了方便快捷的售后服務,為企業創造了可觀的經濟效益.該系統已成功應用于實際,并經實踐證明,是一項十分實用的技術.
[1]石云卿.低成本遠程診斷和維護系統在鋁熔化保溫爐上的應用[J].有色金屬加工,2007(6):57-58.
[2]何立民.單片機應用技術選編[M].北京:北京航空航天出版社,2000.
[3]劉斌儒,戴勇.基于AVR單片機Mega16的電子時鐘設計[J].國外電子元器件,2008(7):18-19.
[4]馮秀麗.基于電話網的遠程數據通信技術以及在污水管理系統中的應用[D].北京:北京化工大學,2001.
[5]胡社教,張陽陽,潘宗嶺.基于MSC1210的高壓機無線控制系統[J].電子測量與儀器學報,2008(增):265-268.
[6]陳輝.基于公話網的城市熱網的遠程測控系統的實現[D].吉林:吉林大學,2009.
[7]余臻.基于AT指令集的遠程通信的實現[J].廈門大學學報,2004(5):166-169.
[8]懷石工作室.MODEM完全手冊[M].北京:中國電力出版社,2000.
猜你喜歡
流程工業(2022年3期)2022-06-23 09:41:08
煤氣與熱力(2021年3期)2021-06-09 06:16:18
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
電子設計工程(2015年15期)2015-02-27 12:07:30