基于模糊控制的車輛側傾穩定性聯合仿真
2011-06-29 09:07:04朱茂桃秦少雋
重慶交通大學學報(自然科學版) 2011年5期
陳 陽,朱茂桃,秦少雋
(1.上海大眾產品工程部,上海201805;2.江蘇大學 汽車與交通工程學院,江蘇 鎮江212013)
隨著汽車技術的不斷發展,車輛的安全性和操縱穩定性越來越受到重視。汽車在高速行駛或在低附著系數路面上行駛時,由于受到外界干擾或駕駛員轉向作用,側向附著力常常達到附著極限,使車輛側傾穩定性變差,容易造成交通事故。因此,提高車輛的側傾穩定性對行駛安全意義重大[1]。
筆者選用某型號的越野車為研究對象,在ADAMS/Car模塊中建立整車系統動力學模型,利用MATLAB建立模糊控制控制器模型,將控制器與整車模型相結合對橫擺角速度和質心側偏角進行聯合控制仿真[2]。
1 整車系統動力學模型
1.1 整車模型的建立
研究的越野車為后置后驅式,前懸架為螺旋彈簧非獨立懸架,后懸架采用的是縱置鋼板彈簧非獨立懸架。在ADAMS/Car中建立的整車模型如圖1。
1)前懸架:主要由上下橫臂、主銷軸、轉向橫拉桿、螺旋彈簧和減震器等組成。
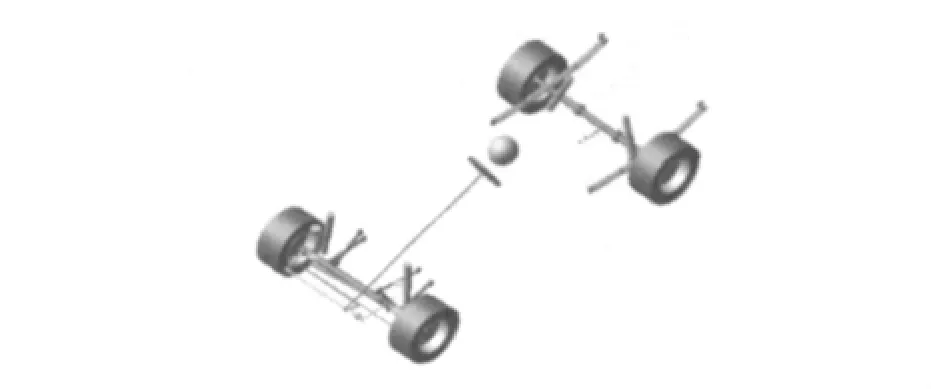
圖1 整車虛擬樣機模型Fig.1 Virtual prototype model of vehicle
2)后懸架:主要是由縱置單片鋼板彈簧,整體橋,減振器組成。建模時,鋼板彈簧簡化為非線性多義梁(Nonlinear Beam)。
3)轉向系統:采用拉桿式轉向器。
4)橫向穩定桿:采用2根斷開軸中間通過轉動副連接,并在轉動鉸鏈上施加扭轉力進行簡化建模。
5)輪胎:前后輪胎均采用Fiala輪胎模型。將輪輞簡化成剛性圓板,胎體由支撐于圓板上的彈簧表示,胎冠則簡化圓環梁并由彈簧支承[3]。
6)動力總成:采用后置發動機,將發動機、變速器、離合器集合成一體,用函數模擬實現各部分的功能。
7)制動系統:采用4通道盤式制動控制。
1.2 模型的驗證
對比實車試驗和模型仿真來驗證虛擬樣機模型的正確性。試驗為雙移線試驗和蛇形試驗,均在定遠專用試驗場地進行實車試驗。
1.2.1 蛇形試驗
蛇形試驗按照國家標準GB/T 6323.1—94《汽車操縱穩定性試驗方法蛇形試驗》[4]的要求進行。初始車速50 km/h,總共10個樁,L=30 m。實驗與仿真結果如圖2、圖3。


1.2.2 雙移線試驗
初始車速60 km/h,試驗過程中采集到的數據和試驗仿真數據如圖4、圖5。
從上述試驗及相應工況下仿真試驗的比較,發現表征車輛側向穩定性的2個變量橫擺角速度和側向加速度的試驗值與仿真值均能較好的保持一致,驗證了虛擬樣機模型的正確性,為車輛側傾穩定性控制的研究提供了可靠的理論模型。


2 模糊控制器的設計
2.1 以橫擺角速度為控制變量設計控制器
對橫擺角速度進行控制時,采用二維模糊控制器,輸入變量為實際橫擺角速度r與理想橫擺角速度rd的偏差e(r),以及偏差變化的快慢ec(r),輸出變量u為橫擺力矩MZ(r)。
變量誤差e(r)、誤差變化ec(r)及控制量u的模糊集如下:
e(r)的模糊集均為:{NB,NM,NS,PO,PS,PM,PB}
式中:NB為負大;NM為負中;NS為負小;PO為正0;PS為正小;PM為正中;PB為正大。
所取的控制力矩的原則,是當誤差大或較大時,所選的控制橫擺力矩以盡快消除誤差為主;而當誤差較小時,選擇控制橫擺力矩要注意防止超調,以系統的穩定性為主要出發點。根據這種原則列出控制規則見表1。

表1 模糊控制規則Tab.1 Fuzzy control rules
以橫擺角速度為控制變量的控制器的輸入輸出關系,如圖6。

圖6 模糊控制器的輸入、輸出關系Fig.6 Relations of fuzzy controller’s input and output
2.2 以質心側偏角為控制變量設計控制器
對質心側偏角進行控制時,仍用二維模糊控制器,輸入變量就變成實際質心側偏角β與理想橫擺角速度βb的偏差 ec(β),以及偏差變化的快慢 ec(β),輸出變量u為橫擺力矩MZ(β)。它們的定義范圍和橫擺角速度的控制是一樣的,不同的是模糊控制規則的設定。基于質心側偏角反饋控制的模糊規則表,如表2。模糊控制器的輸入輸出關系見圖7。
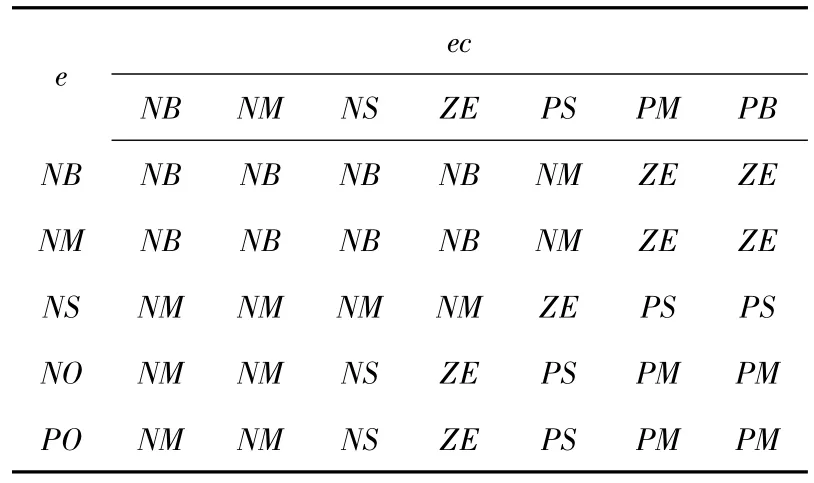
表2 模糊控制規則Tab.2 Fuzzy control rules

(續表2)
2.3 以橫擺角速度和質心側偏角為控制變量設計控制器
橫擺角速度和質心側偏角聯合控制時,輸入變量為橫擺角速度的偏差e(r)和質心側偏角的偏差e(β),輸出變量為橫擺力矩MZ。
聯合反饋控制的輸出變量是經過加權并相加后得到的總的橫擺力矩[5-6]。即:

式中:MZ為控制器輸出的總的橫擺力矩;MZ(r),wr分別為橫擺角速度控制器輸出及加權因子;MZ(β),wβ分別為質心側偏角控制器輸出及加權因子。
3 聯合仿真計算和結果分析
3.1 建立聯合仿真模型
進行仿真前需要專家模塊定義輸入輸出變量,實現ADAMS和控制程序之間的閉環控制。ADAMS的輸入變量是四輪制動力矩變量,輸出變量是車身側向加速度、車身質心側偏角、車身縱向車速、車身橫向車速、車身橫擺角度、汽車行駛車速。然后建立操縱穩定性仿真的控制文件,根據車輛試驗時測力轉向盤記錄的數據輸入,以保證仿真的真實性。
在MATLAB/Simulink里面建立整車操縱穩定性的二自由度模型,并采用單輪制動產生附加橫擺力矩來控制汽車在極限情況下的橫擺角速度和質心側偏角。
聯合仿真之前應該將 adams_server.py、decode.m和adams_plant.dll三個文件放在ADAMS工作目錄下,否則仿真的時候MATLAB與ADAMS無法建立連接。在Controls下的Plant Export中將輸入輸出變量填入到對話框內,點擊后自動生成(.m)文件。在ADAMS/Car中Simulate下的File Drive Events輸入路面文件和控制文件,單擊后自動生成ADAMS Solver數據文件(.adm)、駕駛員控制文件(.dcf)和Solver控制文件(.acf)等。修改(.m)文件,使控制的文件與之對應。打開MATLAB,修改工作路徑使之與ADAMS的相同,輸入相應的命令打開生成的(.m)文件,再輸入 adams_sys,調出 adams_sub,然后與MATLAB建立的橫擺角速度控制系統模型連接起來[7-8]。同理,將導入 MATLAB的整車模型與建立的質心側偏角控制器相連接,建立基于質心側偏角反饋控制的聯合仿真圖。
將兩者結合起來,建立橫擺角速度和質心側偏角聯合反饋控制的聯合仿真圖(圖8)。
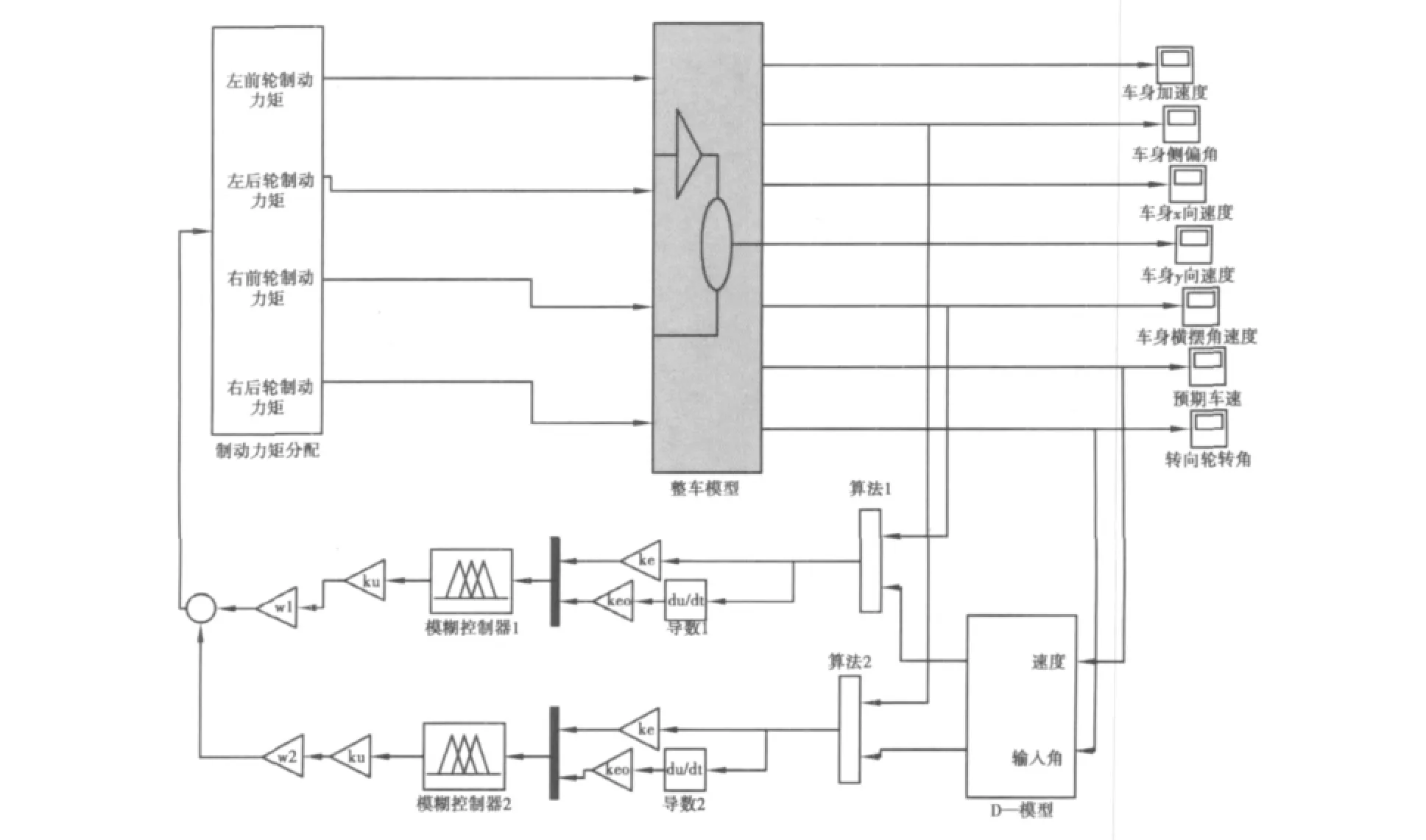
圖8 聯合仿真系統結構Fig.8 Structure of co -simulation model
3.2 仿真分析和仿真結果
3.2.1 單正弦輸入仿真與分析
單正弦轉向行駛,即汽車變路徑行駛。仿真條件為前輪轉向角為單正弦輸入,汽車的初始車速為110 km/h,地面附著系數為1,即汽車高速時轉向的極限工況下的仿真。頻率為0.5 Hz,幅值為100°,約1.75 rad。仿真結果如圖9、圖10。
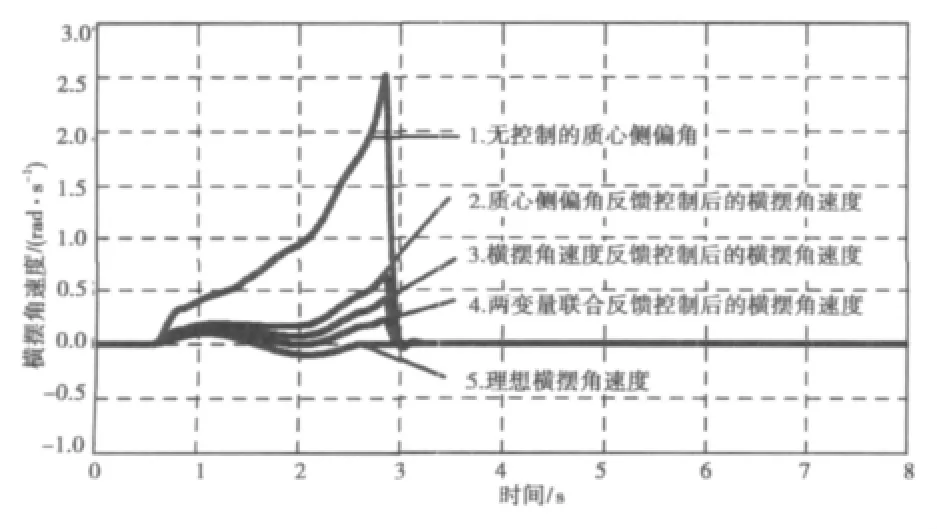
圖9 不同反饋控制的橫擺角速度響應對比Fig.9 Yaw velocity response of different feedback control
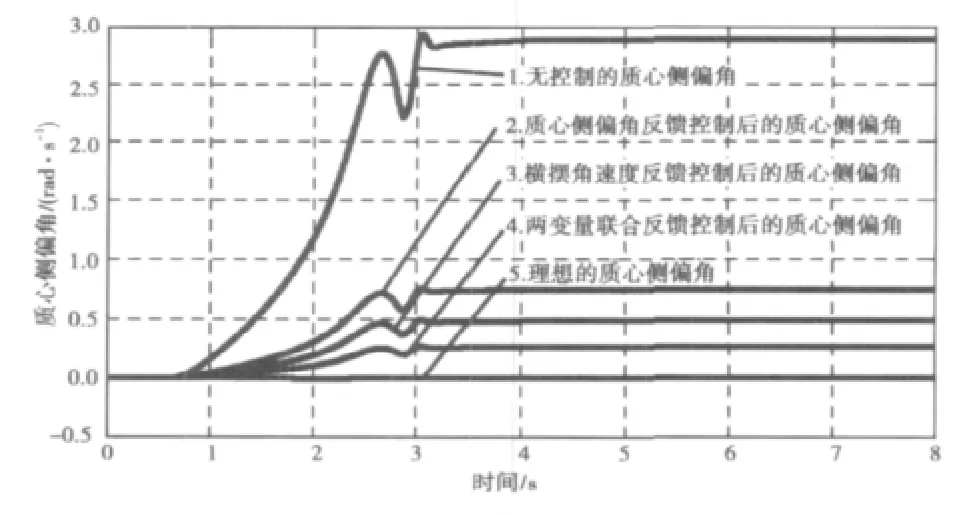
圖10 不同反饋控制的質心側偏角響應對比Fig.10 Sideslip angle response of centroid of different feedback control
3.2.2 角階躍輸入仿真與分析
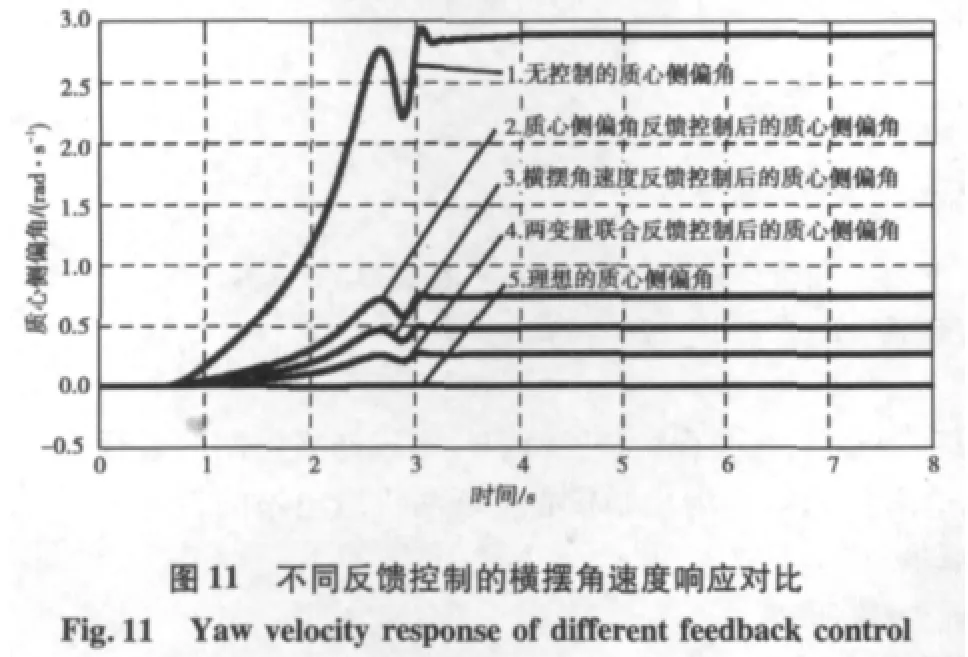
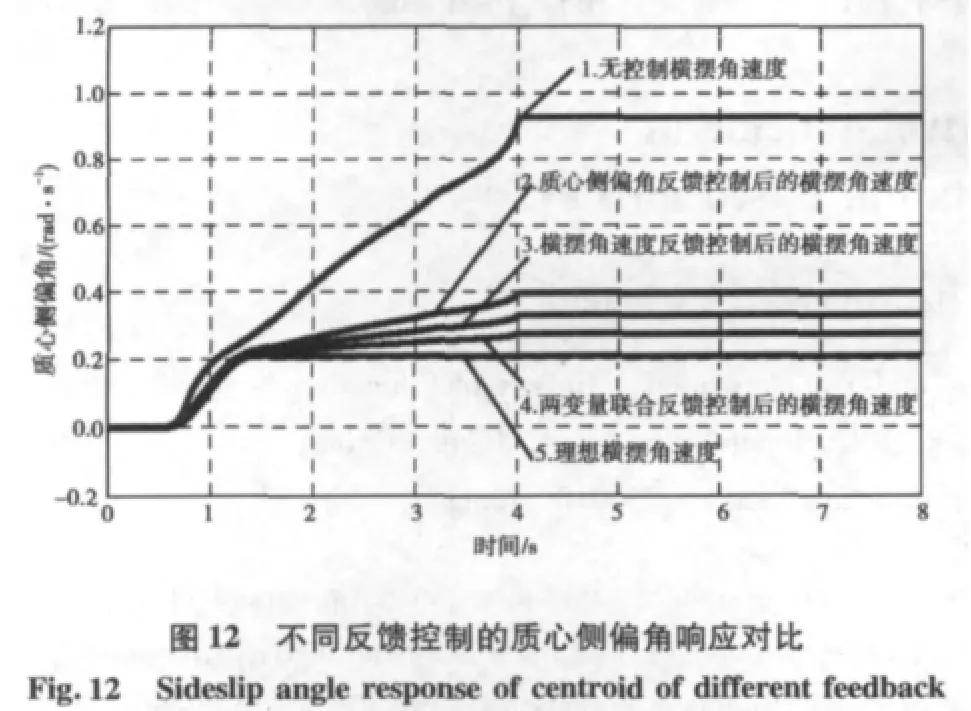
駕駛員對轉向盤進行階躍輸入,常用轉向盤角階躍輸入下的瞬態響應來表征汽車的操縱穩定性。仿真條件:前輪轉向角階躍輸入,汽車的初始車速為50 km/h,地面附著系數為0.2,即汽車在地附著濕滑路面上進行圓周行駛的極限工況,最大的輸入角為100°。仿真結果如圖11、圖12。
從2個實驗中橫擺角速度響應和質心側偏角響應對比圖中可以明顯看出,無控制情況下,汽車的橫擺角速度和質心側偏角都遠遠大于理想情況。
4 結論
本文基于ADAMS/Car建立整車虛擬樣機模型,并通過實驗驗證了模型的正確性。基于模糊控制理論設計了橫擺角速度反饋模糊控制器、質心側偏角反饋模糊控制器以及這兩個變量聯合反饋的模糊控制器。在模糊理論的基礎上建立聯合仿真模型,進行了轉向盤單正弦輸入和在轉向盤角階躍輸入的操縱穩定性仿真,比較分析了橫擺角速度反饋控制器、質心側偏角反饋控制器,以及聯合反饋控制器的控制效果。結果表明:3種控制方法都可以較好的控制汽車的橫擺角速度,提高了汽車行駛時的穩定性。采用2個變量聯合反饋控制的控制效果優于單個變量的反饋控制,并且橫擺角速度反饋控制器優于質心側偏角反饋控制器。
[1]李白娜.汽車操縱穩定性的仿真分析研究[D].武漢:華中科技大學,2006.
[2]范成建,熊光明,周明飛.虛擬樣機軟件MSC.ADAMS應用與提高[M].北京:機械工業出版社,2006.
[3]陳軍.MSC.ADAMS技術與工程分析實例[M].北京:中國水利水電出版社,2008:161-163.
[4]GB/T 6323.1—94汽車操縱穩定性試驗方法蛇形試驗[S].北京:中國標準出版社,1994.
[5]安麗華.汽車電子穩定性程序ESP可控制方法及聯合仿真研究[D].南京:南京理工大學,2009.
[6]馬春卉.基于MATLAB的汽車ESP系統控制模型及方法研究[D].南京:南京理工大學,2008.
[7]MSC Software Company.Getting Started Using ADAMS/Controls[M].California:Mscprc Press,2007.
[8]MSC Software Company.ADAMS/Car User`s Guide[M].California:Mscprc Press,2003.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
核科學與工程(2015年4期)2015-09-26 11:59:03
決策探索(2014年21期)2014-11-25 12:29:50
中學數學雜志(初中版)(2006年1期)2006-12-29 00:00:00