GPS橋梁施工平面控制網的設計與實踐
2011-07-23 00:28:26張勝偉宋振柏
山東理工大學學報(自然科學版) 2011年6期
張勝偉,宋振柏,顧 葉
(1.山東理工大學建筑工程學院,山東淄博255091;2.山東理工大學資源與環境工程學院,山東淄博255091)
1 GPS施工控制網的設計
近些年來,我國大跨度橋梁.施工工藝的改進對測量工作提出了快速、高精度的要求,而GPS技術的出現與應用為滿足施工要求提供了有利的條件本文結合位于某國道上的一座大型公路大橋控制網的施工需要,解決了應用GPS定位系統在設計和施工控制網中的幾個問題.大橋全長3245m,其中主橋長2290m,橋面寬31m,雙向六車道,結構復雜,全橋包括有預應力空心板梁、大跨度的預應力鋼筋混凝土連續梁.
1.1 控制網精度的確定
為了滿足橋梁施工放樣的要求,達到建立橋梁施工控制網的預期目標,控制網必須有足夠的精度.對于大跨度橋梁控制網的精度如何確定,目前尚無明確的規范,通常有以下兩種方法[7]:一種是根據橋式及橋長的允許誤差確定施工控制網的精度,這種方法一般根據鋼梁的制造和安裝誤差進行分析;另一種方法是根據橋墩放樣的容許誤差來分析確定施工控制網的必要精度.最終確定控制網的精度時,應根據兩種分析方法的結果,并結合相應規范、具體橋梁的特點等綜合因素確定.
對于本工程來講,大橋是以預應力鋼筋混泥土連續梁為主,其他結構為輔的大型橋梁,在確定施工控制網必要精度時,可以按上述方法中的第二種方法進行分析,即按橋墩中心點位的容許誤差來分析.此時
式中m控為控制點的誤差,Δ為橋墩中心放樣的容許誤差.
Δ可以從現行的相應規范中查得,按上式即可求得m控.之后可按控制網的設計邊長或者橋軸線的長度確定控制網的相對精度.
在現行的幾種規范中,對橋墩中心定位容許偏差的規定有少許差別.文獻[8] 中:對連續梁和跨度大于60m的簡支梁,其容許誤差為±20mm,對于跨度小于60m的簡支梁,其容許誤差為±10mm.本橋最大的跨度大于60m,Δ可取±20mm,則m控=±8mm.在文獻[9] 中:橋墩(臺)的軸線偏位為±10mm,這樣求得m控=4mm.
通過上述兩種方法所確定的精度有一定的差距,綜合考慮兩項指標,取其平均值作為最終的精度要求,即m控=6mm.
文獻[10] 中確定控制網等級見表1.
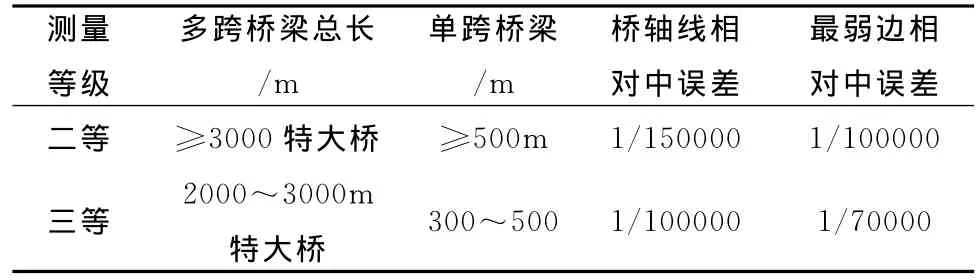
表1 按橋長確定橋梁施工平面控制網的必要精度
該大橋長度大于3 000m,且單跨長度大于500m,故對大橋控制網的設計精度提出邊長相對精度為二等,且邊長誤差≤6mm的雙重精度要求.
1.2 控制網的網型及標石設計
施工控制網的主要作用是為施工放樣服務,滿足橋梁墩(臺)施工放樣精度的要求.GPS橋梁施工平面控制網的點位及網型可以從4個方面考慮:
(1)控制點應選在地面基礎穩定,土質條件較好,避開施工干擾和有利于長期保護的地方.
(2)在保證點位穩定性的前提下,直接就近施工,既能保證施工放樣的方便性,又能減少控制點的傳遞誤差,提高工程質量.
(3)相鄰控制點間應盡可能通視,點位盡可能設在地勢較高、有利于施工放樣和控制網加密的地方.點位周圍的環境應滿足GPS觀測的要求,不宜設在交通繁忙等干擾大的地方.
(4)GPS同步環應以邊連式或網連式的方式連接,不允許采用點連式,最簡獨立環的基線邊數必須符合相應等級的規定.主橋控制網宜布設成三角形和大地四邊形組成的堅強網型,以提高GPS網的可靠性.
在進行該大橋施工控制網測量項目的選點時,我們參閱了“施工組織設計”中有關施工場地布置的內容,充分考慮上述提到的各項選點原則,結合測區的地形地質情況,將控制網布設成雙大地四邊形結構,即以橋軸線作為雙大地四邊形的公共邊,在設計橋軸線的東西兩端分別布設一對點,以這對點作為本控制網的基礎控制點,構成大橋主控制網.考慮到整個網的圖形結構強度和控制點遭到破壞的可能性,又在大堤兩岸各加密了一個點,從而構成了本次大橋控制網.網型結構如圖1所示.

圖1 橋梁控制網
2 外業觀測及數據處理
2.1 外業測量
由于是施工控制網,精度要求較高,在具體的外業施測過程中,除遵循一般GPS測量所需要注意的事項外,還采取了一定的措施盡量減少外業觀測誤差的影響.首先點位埋設好后,保證點位有一個充分的穩定期;其次采用雙頻GPS測量儀器;觀測前做好星歷預報工作,選擇有利的時段進行觀測.
外業觀測時,采用了3臺Trimble GPS雙頻接收機來完成,觀測前根據衛星星歷預報表和實地交通情況編制了觀測調度計劃.觀測時嚴格執行調度計劃,在規定的時間段進行同步觀測.為了保證控制網能達到預期的精度,且使網點精度均勻,外業測量按文獻[11] 二等技術要求實施.實際觀測時采用的主要技術要求見表2.

表2 GPS觀測主要技術要求
在作業過程中,及時利用隨機軟件對觀測成果進行預處理和質量分析與評定,按規范要求,對重復邊的互差、同步環閉合差等進行了評定,對不符合規定要求的基線邊進行重測,確保了外業觀測成果的質量.
2.2 控制網的數據處理及精度評定
2.2.1 三維無約束平差
為了評估大橋控制網的整體內部符合精度,首先對大橋控制網進行了無約束平差.利用隨機商用軟件結算出基線向量的前提下,以網中Z3為固定位置基準點,以經過粗差分析后的獨立基線向量及其協方差陣作為觀測量,進行三維無約束平差.結果顯示,最弱點為Z7,其點位中誤差為±4.7mm;Z2的點位中誤差最小,其值為1.2mm;全網平均點位中誤差為±2.4mm.表明本網具有很高的內符合精度,滿足設計中提出的±6mm指標要求.
2.2.2 二維約束平差
橋梁施工控制網一般以橋軸線為坐標軸建立局部坐標系(施工坐標系),而GPS測量的坐標系為WGS-84大地坐標系,所以應將GPS基線向量與局部坐標系的已知點和已知方位聯系,在局部坐標系內進行約束平差.
平差時以K1和K3兩點的國家大地坐標為已知點進行二維約束平差,求得各控制點的大地坐標及相應的精度,再以橋軸線一端點(Z1)的里程為橋軸線坐標系的x坐標,y坐標為0,進行坐標的平移和旋轉,求得各控制點在橋軸線坐標系中的坐標.
二維約束平差后,最弱點為Z7,最弱點的點位中誤差為±3.2mm;最弱邊為Z1—Z3,最弱邊的邊長相對中誤差為1/458 716;最弱橋軸線邊長相對中誤差為1/640 000.
通過對控制網設計精度和實測精度的比較(見表3),可以看出橋梁GPS施工平面控制網的實測精度大大優于設計精度,達到了設計要求.

表3 GPS控制網設計精度與實測精度對比
3 橋梁平面控制網成果可靠性檢驗
為了確保橋梁施工控制網的精度與可靠性,采用高精度測距邊對部分GPS基線邊進行檢測.測距邊觀測采用Leica TC2003全站儀及配套棱鏡、氣象儀器配套設備,觀測值經儀器加乘常數改正、氣象改正、傾斜改正等必要的數據改正處理,計算得到的測距邊長與GPS邊長對比結果見表4.

表4 測距邊長與GPS邊長對比
由表4可見,GPS邊長與測距邊長之間具有較高的符合精度,說明GPS測量成果可靠.
4 結束語
GPS定位技術以其高精度、高效率、低成本、受氣候影響小等突出優勢,已逐步取代傳統的三角測量技術而成為橋梁施工控制網測量的主流技術.針對橋梁工程特點,對GPS控制網的精度、網型、觀測及數據處理方法進行優化設計,是確保控制網測量質量的重要前提.實踐證明,GPS靜態定位技術可應用于高精度的橋梁施工控制網,本公路大橋施工控制網的設計、施測方法及技術要點合理可行,能夠滿足工程施工要求.
[1] 吳迪軍.GPS橋梁施工控制網設計和施測方法研究[J] .橋梁建設,2009,20(4):72-75.
[2] 周世林,吳迪軍.GPS橋梁施工控制網設計及應用分析[J] .鐵道勘察,2009(6):08-10.
[3] 陳現春,羊凱東,鐘文俊.南京長江四橋首級施工控制網的建立[J] .四川測繪,2008,31(2):66-69.
[4] 周傳松,姜本海.青島海灣大橋高精度施工控制網的建立[J] .人民長江,2007(10):89-90.
[5] 吳迪軍,張建軍,李書銀.復雜特大型橋梁施工控制網的建立與復測[J] .工程勘察,2007(3):45-47.
[6] 朱繼武,羅永權.淺談利用GPS布設大型橋梁施工控制網[J] .測繪與地理空間信息,2007,30(06):84-88.
[7] 吳棟材.大型斜拉橋施工測量[M] .北京:測繪出版社.1996.
[8] 中華人民共和國鐵道部.TBJ102-1985.鐵路測量技術規則[S] .
[9] 中華人民共和國交道部.JTJ071-1998.公路質量檢驗評定標準[S] .
[10] 中華人民共和國交道部.JTGC10-2007.公路勘測規范[S] .
[11] 中華人民共和國交道部.JTJ/T006-98.公路全球定位系統[S] .
猜你喜歡
建材發展導向(2021年9期)2021-07-16 07:11:36
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業技術(2016年15期)2016-12-01 05:31:04
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
西安建筑科技大學學報(自然科學版)(2014年2期)2014-11-12 13:04:54