基于LabVIEW的動平衡測試系統開發及應用
2011-08-09 08:03:44孫麗萍尹愛軍
中國測試 2011年6期
孫麗萍,尹愛軍
(重慶大學測試中心,重慶 400044)
0 引 言
在現代工程技術領域中,動平衡測試分析已成為旋轉機械工程中的一個重要環節。為適應現代動平衡的需要,提高測試精度,該文將虛擬儀器技術、數字信號處理技術與動平衡技術相結合,采用影響系數法,利用LabVIEW組建了基于虛擬儀器技術的動平衡測試系統。該系統充分利用了計算機的存儲和計算功能,功能靈活、開放,容易與其他外設、網絡相連,構成更強大的系統。
1 動平衡測試原理
由于生產的需要,轉子動平衡的理論發展迅速,出現了多種平衡方法,主要有振型平衡法和影響系數法。振型平衡法基于疊加原理,結構復雜,不易實現自動化;影響系數法是一種完全建立在試驗基礎之上的平衡方法,對轉子的動特性了解要求較少,特別適合用于現場動平衡,得到了廣泛應用。
1.1 影響系數法
基于影響系數的雙面動平衡法的步驟如下:
(1)分別求得工作轉速下由原始不平衡量引起的 A 處和 B 處的振動,XA=Xa∠φa,XB=Xb∠φb。
(2)在左校正面上加試重,mL=ml∠φl,然后測得A 處和 B 處的振動,XAL=Xal∠φal,XBL=Xbl∠φbl。
(3)移去 m1,在右校正面上加試重 mR=mr∠φr,然后測試 A 處和 B 處的振動,XAR=Xar∠φar,XBR=Xbr∠φbr。
(4)計算影響系數


(5)計算不平衡量

(6)加配重消除不平衡量。
1.2 基于相關法的振動幅值和相位的計算
準確計算不平衡量振動的幅值和相位是動平衡校正的關鍵。利用相關函數可準確地提取出振動信號中基頻的幅值和相位。在 x(t)、y(t)均為實能量信號的情況下互相關函數定義為
它描述了2個信號之間的相似程度,是在多頻成分信號中提取有用信號的有效方法。一般情況下,測試振動信號成分復雜,除了轉速基頻以外還有倍頻、亞倍頻及隨機振動成分,如式(5)
式中:a0——直流分量;
ωi——各信號頻率;
αi——不同頻率信號的相位;
s(t)——干擾信號。
設頻率為ω,相位為0的標準正弦和余弦信號為
分別與式(6)所示的輸入信號進行互相關
于是得到振動基頻信號的幅值和相位分別為
2 基于LabVIEW的動平衡測試系統設計
該文采用LabVIEW8.6平臺開發動平衡測試系統[1-2]。
2.1 測試系統的組成
動平衡測試系統由數據采集模塊、2個速度測振傳感器、光電轉速傳感器及虛擬儀器軟件系統組成,如圖1所示。在測試過程中,2個振動傳感器檢測左右2個測點的振動速度信號;同時光電轉速傳感器檢測主軸轉速脈沖信號,形成與主軸轉速同頻率的基準信號[3]。

圖1 測試系統總體設計框圖
2.2 動平衡的測試分析流程
雙平面動平衡測試的流程如圖2所示。(1)設置采樣頻率、采樣點數、物理通道等參數,在工作轉速下測試轉子的初始振動值;(2)在A平面上加試重,測試在A平面上加試重后轉子的振動值,拆除A面所加試重;(3)在B面加試重,測試在B面加試重后轉子的振動值,拆除B面所加試重;(4)計算配重,在兩校正平面上加配重,測量校正后轉子的振動值[4-5]。

圖2 動平衡測試流程圖
2.3 測試軟件的設計
測試軟件模塊如圖3所示,主要包括信號采集、參數設置、信號分析、結果顯示及報表輸出等部分。主要介紹系統的數據采集、信號分析處理模塊[6]。
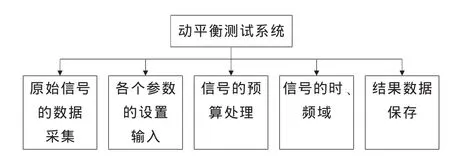
圖3 軟件模塊圖
(1)數據采集。DAQmax對采集有關的參數、操作進行了很好的封裝,如采樣長度、采樣頻率、通道、靈敏度等。系統在DAQmax的基礎上,實現了3個通道的數據采集管理,采集子VI的程序框圖如圖4所示。

圖4 3通道數據采集程序
(2)數據分析與處理。數據的分析與處理是完成動平衡測試系統的關鍵,主要包括轉速的測量、基頻幅值和相位的準確計算、利用影響系數法進行動平衡配重的計算3個模塊。
首先由光電轉速脈沖基準信號,利用LabVIEW中的單頻測量VI得到轉速和基頻相位,程序框圖如圖5所示。
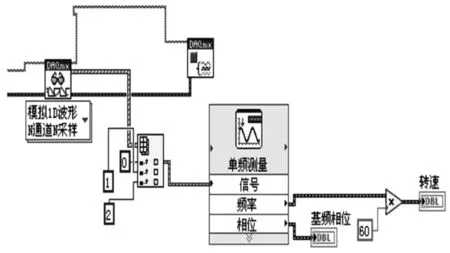
圖5 轉速測量程序
由基頻轉速生成標準的正弦信號和余弦信號。然后將實測振動信號分別與正弦、余弦信號做互相關,得到振動信號基頻幅值和相位,程序框圖如圖6所示。
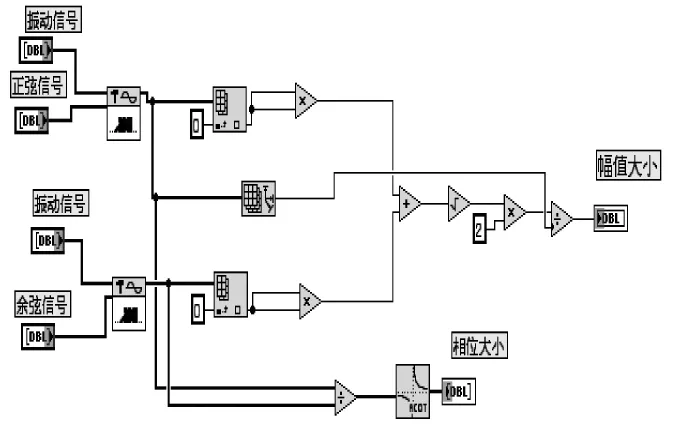
圖6 振幅及相位測量程序
最后計算影響系數,并確定不平衡量。該文對雙面校正分析過程中的各種情況都做了分析,程序框圖如圖7所示。
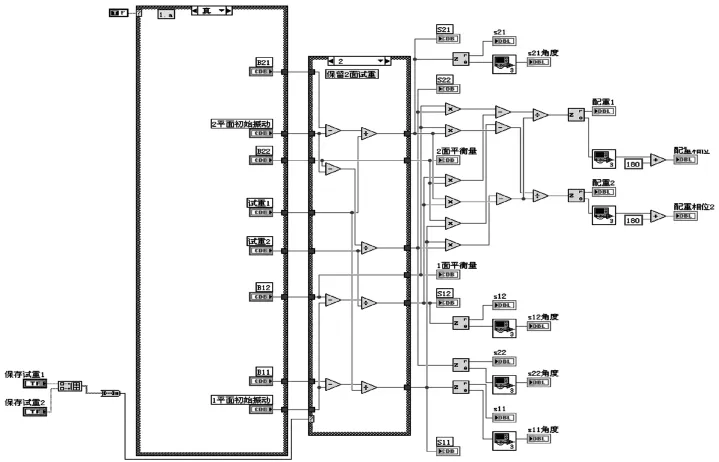
圖7 雙面配重計算子VI程序框圖
3 現場實驗
為了驗證系統的性能,在寧江機床廠對CKN1112系列CNC全功能型數控縱切自動車床電主軸做了現場試驗。該軸為細長軸,需進行雙平面動平衡分析。試驗現場布局如圖8所示。軸逆時針旋轉,在2個軸承的垂直方向分別安裝速度振動傳感器,在A平面外側軸上貼有反光片,激光轉速傳感器水平安裝。

圖8 現場布置圖
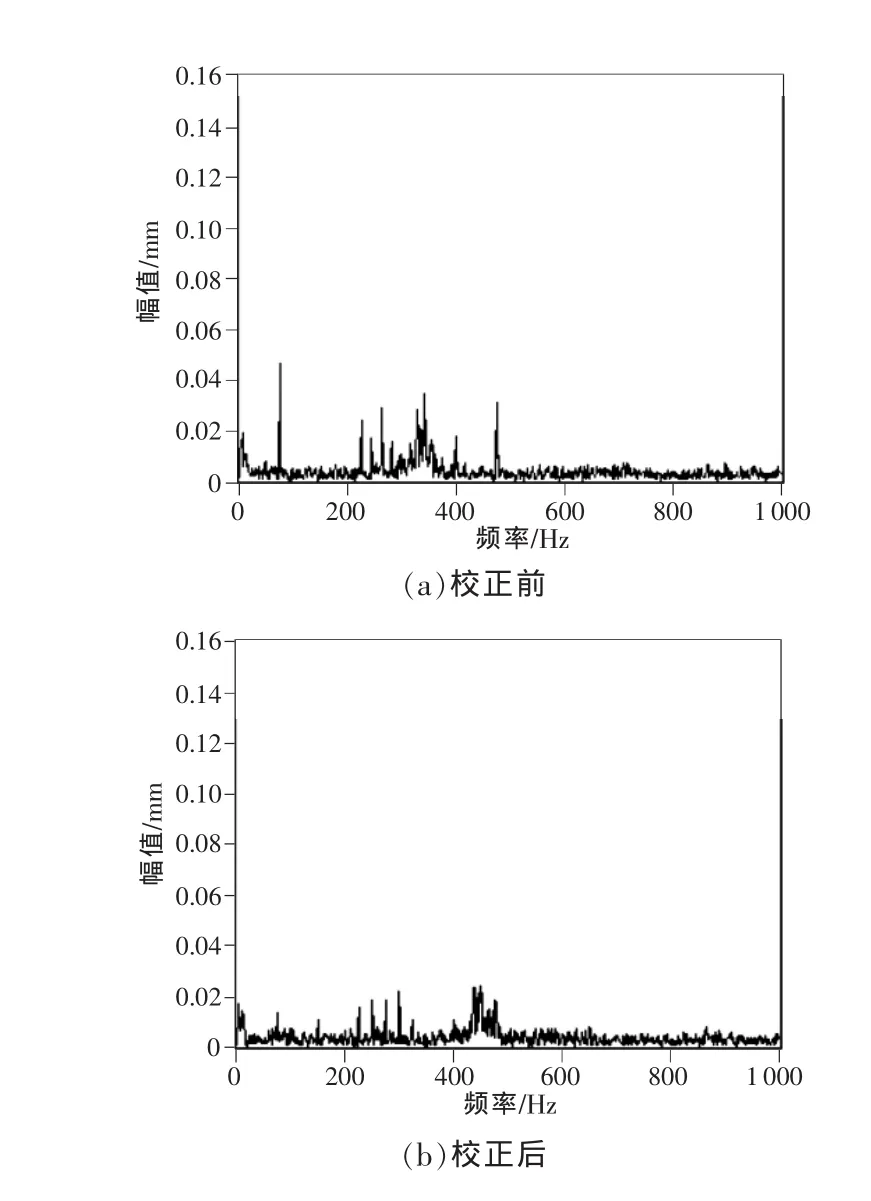
圖9 A面校正前后的頻譜圖

圖10 B面校正前后的頻譜圖
圖9表示轉子轉速為4500r/min時A測點校正前后的頻譜圖。如圖可以看出,測點基頻振動速度值從0.045 mm/s下降到0.013 mm/s,A面的不平衡振動已基本消除,校正后的基頻振動已經不是主要成分。
圖10為相同轉速下B測點校正前后的頻譜圖。由圖10可以看出,測點基頻振動速度值從0.144mm/s下降到0.042 mm/s,B面的振動明顯下降,校正后基頻的振動量要小于二倍頻成分,已經不是主要成分。
4 該虛擬測試儀與傳統儀器的對比分析
虛擬儀器技術的圖形化編程模式可以大大提高軟件的開發速度,而且是專門針對測試系統所開發的軟件,因此具有強大的數據分析、數據控制和數據表達能力,更重要的是它以PC機和數據采集卡為通用硬件平臺,較之傳統儀器更加易于維護,并且成本大大降低[7-8]。在通用硬件平臺確定之后,其功能主要是由軟件實現測試,而不像傳統儀器那樣主要是由硬件決定,比較容易實現技術的更新和功能的擴展。因此,將虛擬儀器應用于動平衡測試系統,可以使整個系統有較高的精度,縮短開發時間,降低成本,提高編程效率,并且具有良好的使用效果,系統易于維護和實現功能的擴展和升級,具有較好的發展前景[9-10]。
5 結束語
該文利用LabVIEW完成動平衡測試系統的開發,并進行現場生產驗證。系統操作方便,界面友好,能完成數據采集、分析與處理等功能,減少了人工干預,增強了測試分析過程的自動化,提高了測試的準確性,比傳統的動平衡測試儀具有更高的性價比。
[1] 雷振山.LabVIEW7 Express實用技術教程[M].北京:中國鐵道出版社,2004.
[2] 唐治宏,劉景能,黃炳瓊,等.基于LabVIEW的便攜式動平衡測試系統研究[J].裝備制造技術,2007(6):38-40.
[3]李剛,林凌.LabVIEW——易學易用的計算機圖形化編程語言[M].北京:北京航空航天大學出版社,2001.
[4]王漢英,張再實,徐錫林.轉子平衡技術與平衡機[M].北京:機械工業出版社,1988.
[5]陳澤宇,顧文荃.基于虛擬儀器的軟件設計方法在自動測試系統中的應用[J].電子測量技術,1998(3):29-34.
[6] 賀世正,余鵬飛,蔡伯春.虛擬儀器技術在碟式分離機動平衡測試中的應用[J].流體機械,2003,31(6):23-26.
[7] Yu Y Q,Jiang B.Analytical and experimental study on the dynamic balancing offlexible mechanisms[J].Mechanism and Machine Theory,2007(42):626-635.
[8] Alici G,Shirinzadeh B.Oprimum dynamic balancing of planar parallel manipulators based on sensitivity analysis[J].Mechanism and Machine Theory,2006(41):1520-1532.
[9] 趙科.基于虛擬儀器的現場動平衡測試儀的開發[D].杭州:浙江大學,2002.
[10]金彥,鄭建榮,吳清.基于虛擬儀器技術的信號處理實現方法比較[J].機械與電子,2003(2):55-58.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45