一種基于ESO的導(dǎo)彈魯棒自動駕駛儀設(shè)計方法①
2011-08-31 06:37:30董飛垚雷虎民張金鵬
固體火箭技術(shù) 2011年6期
董飛垚,雷虎民,邵 雷,張金鵬
(1.空軍工程大學(xué)導(dǎo)彈學(xué)院,三原 713800;2.中國空空導(dǎo)彈研究院,洛陽 471009)
0 引言
針對飛行器控制過程中存在的干擾和未建模特性,近年來,國內(nèi)外學(xué)者展開了廣泛研究[1-7]。文獻[1]基于增益調(diào)度思想設(shè)計了飛機的一種自動駕駛儀,但針對高速飛行器,采用該方法系統(tǒng)的快速性和魯棒性變得較差;文獻[2]依據(jù)H∞控制理論設(shè)計的導(dǎo)彈魯棒自動駕駛儀具有很好的魯棒穩(wěn)定性能,但是其控制器形式過于復(fù)雜,限制了其實際工程應(yīng)用;文獻[3]采用最優(yōu)控制來保證系統(tǒng)的快速性和魯棒性,但是反饋所需的狀態(tài)量在實際工程中并不都能獲得;文獻[4]通過設(shè)計一種基于滑模理論的干擾觀測器來增強系統(tǒng)的魯棒性,但其控制律設(shè)計中需要已知系統(tǒng)不確定性的上界,保守性很大,且容易引起控制量的飽和問題。擴張狀態(tài)觀測器(ESO)是將系統(tǒng)中含有的非線性動態(tài)、模型不確定性及外界擾動等都視為擴張狀態(tài)加以觀測,其本身并不依賴于生成擾動的具體模型,也不需要直接去測量其作用,是通用的擾動觀測器[8]。
本文提出了一種基于擴張狀態(tài)觀測器的導(dǎo)彈滾轉(zhuǎn)自動駕駛儀設(shè)計方法,保證導(dǎo)彈在大機動和強干擾下具有較好的動態(tài)性能和強魯棒性。
1 非線性擴張狀態(tài)觀測器
考慮如下一類n階SISO非線性系統(tǒng):
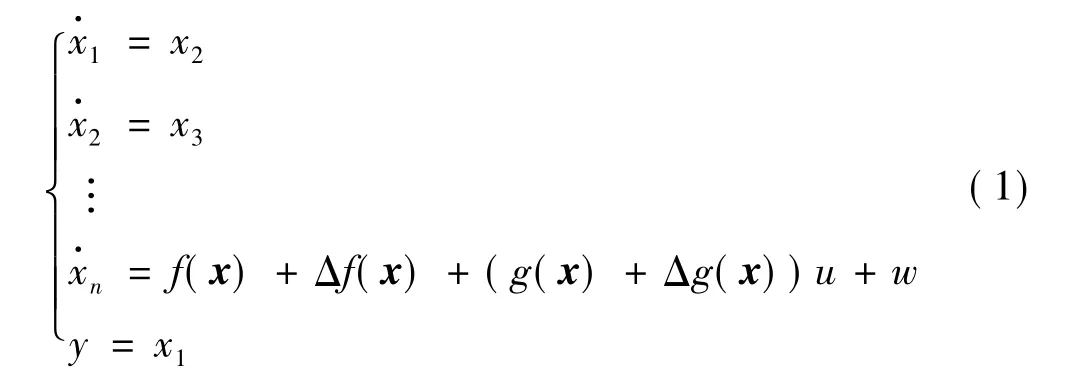
式中 x=[x1x2… xn]T表示系統(tǒng)的狀態(tài);?(x)和g(x)為已知標(biāo)量函數(shù);Δ?(x)、Δg(x)和w表示未知不確定性和外界擾動;u為控制輸入;y為系統(tǒng)輸出。
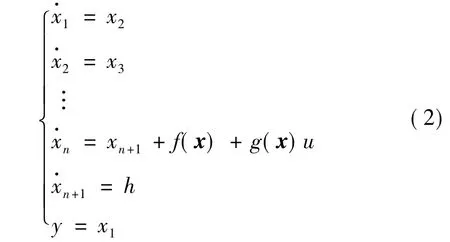
定義d=Δ?(x)+Δg(x)+w為作用于系統(tǒng)的復(fù)合干擾,并將其作為系統(tǒng)(1)的一個擴張狀態(tài)xn+1,則系統(tǒng)(1)可擴展為n+1階系統(tǒng):
針對上述系統(tǒng),采用如下非線性觀測器(NESO):
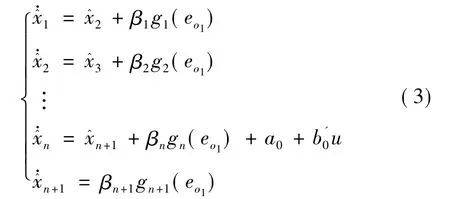
可見,只要βi和gi選擇恰當(dāng),狀態(tài)估計值就能精確逼近實際值xi,即→xi。所以gi的選擇極其關(guān)鍵,目前大多采用如下帶有線性區(qū)的非光滑函數(shù)[9]:
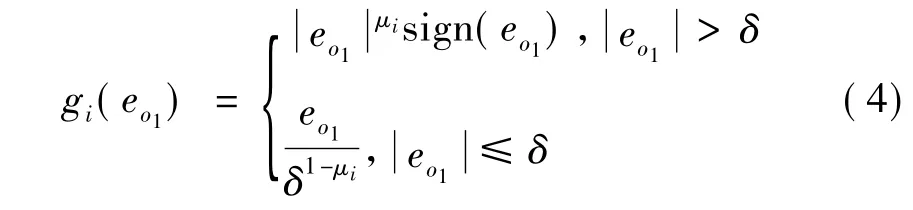
其中,0 <μi<1,i=1,2,…,n+1,δ>0 為 gi切換的閾值。可以看出,函數(shù) gi的一個重要特性是當(dāng)誤差較小時,gi有較大值,相反當(dāng)誤差較大時,gi具有較小值。
2 模型描述
導(dǎo)彈滾轉(zhuǎn)通道控制系統(tǒng)由速率陀螺、舵機和控制算法等組成。其中速率陀螺用來測量導(dǎo)彈的滾轉(zhuǎn)角速率,進而通過積分獲得滾轉(zhuǎn)角,舵機用來響應(yīng)由控制算法生成的副翼偏角指令,形成副翼偏角,產(chǎn)生相應(yīng)滾轉(zhuǎn)力矩,抑制和消除彈體滾轉(zhuǎn)。
舵機一般可用二階模型來描述:

式中 δx和δxc分別為副翼偏角和副翼偏角指令;ωA和ζA分別為舵機的自然頻率和阻尼。
根據(jù)文獻[10],不考慮俯仰、偏航和滾轉(zhuǎn)通道耦合情況,導(dǎo)彈滾轉(zhuǎn)通道的剛體數(shù)學(xué)模型可寫成:

式中 γ為導(dǎo)彈輸出滾轉(zhuǎn)角;Kδ為導(dǎo)彈副翼效率系數(shù);Kdx和Tdx分別為導(dǎo)彈滾轉(zhuǎn)傳遞系數(shù)和滾轉(zhuǎn)時間常數(shù)。
聯(lián)立式(5)和式(6),可得從副翼偏角指令δxc到導(dǎo)彈滾轉(zhuǎn)角γ的傳遞函數(shù):

式中 b=KδKdxω/Tdx,a0=0,a1= ω/Tdx,a2=(Tdxω+2ωAζA)/Tdx;a3=(1+2ωAζATdx)/Tdx。
考慮到空氣動力系數(shù)的不確定性,ai(i=1,2,3,4)和b并不能精確獲得,所以 ai=ai0+Δa,b=b0+Δb,其中ai0和b0表示所對應(yīng)系數(shù)的標(biāo)稱值,Δa和Δb表示相應(yīng)的不確定性。此外,為了后續(xù)仿真驗證,給出彈性彈體和速率陀螺的模型,分別為G1(s)和G2(s):
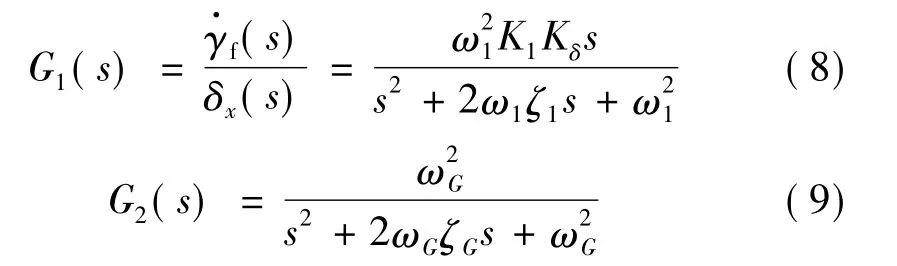
以上模型參數(shù)的取值如表1所示,表中det為等效外界擾動。
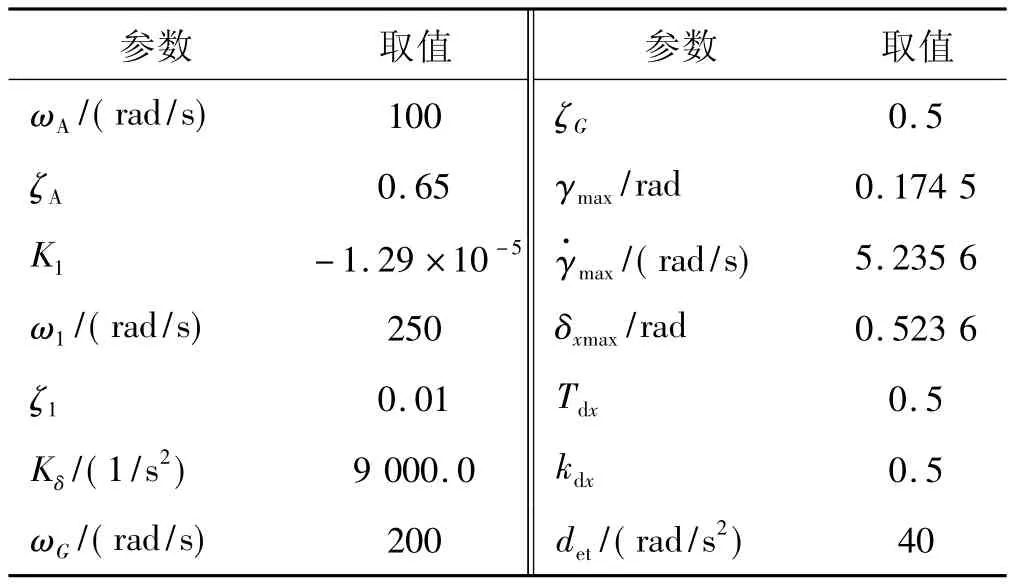
表1 各模型參數(shù)數(shù)值表Table 1 Value of parameters in each model
3 控制算法設(shè)計及穩(wěn)定性分析
為便于分析和設(shè)計,將式(7)寫成如下形式:

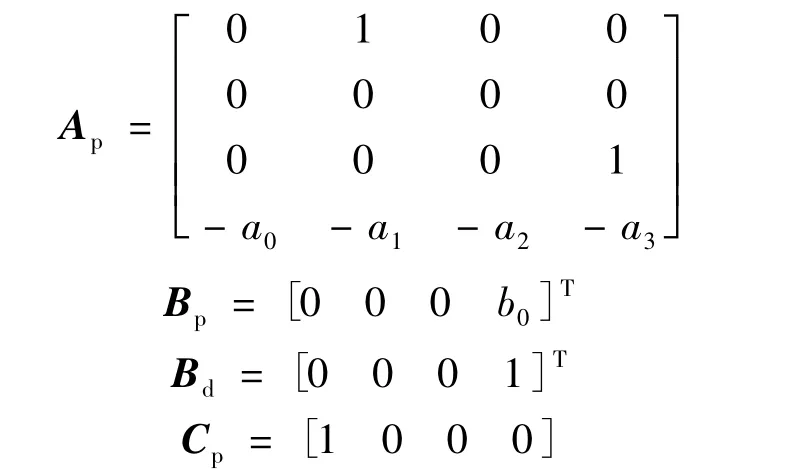
式中 x=[x1x2x3x4]T表示系統(tǒng)狀態(tài);uc=δx為控制輸入;yp=γ為系統(tǒng)輸出;Bd為干擾輸入匹配矩陣;ds=φ-Δa1x1-Δa2x2-Δa3x3-Δa4x4+Δbu,表示作用于系統(tǒng)的復(fù)合干擾,φ為外界擾動;Ap、Bp和Cp分別為系統(tǒng)矩陣、輸入矩陣和輸出矩陣。
Ap、Bp、Bd和 Cp表達式如下:
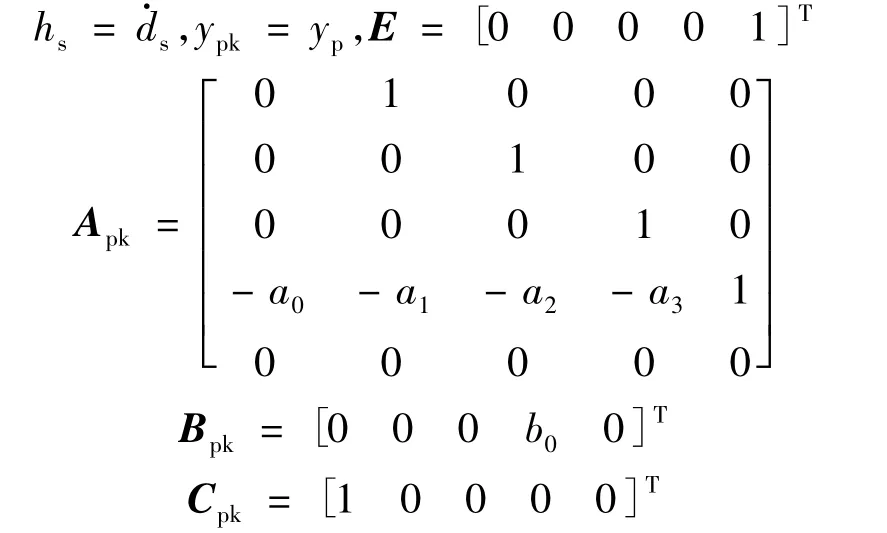
同式(2),若將ds作為系統(tǒng)的一個擴張狀態(tài)x5,則式(10)可擴展為

其中: xpk= [x1x2x3x4x5]T
容易判斷(Ap,Bp,Cp)可控可觀測,根據(jù)文獻[11],若被控系統(tǒng)可控可觀測,用狀態(tài)觀測器估計值形成狀態(tài)反饋時,其系統(tǒng)的狀態(tài)反饋設(shè)計和觀測器設(shè)計可分別獨立進行。所以可先進行系統(tǒng)的控制算法設(shè)計。
3.1 控制算法
本文基于ESO所設(shè)計的控制算法包含兩部分,分別是針對標(biāo)稱系統(tǒng)的最優(yōu)控制項uc1和針對系統(tǒng)復(fù)合干擾的補償項uc2。
針對標(biāo)稱系統(tǒng),采用線性二次型調(diào)節(jié)器(LQR)進行控制,設(shè)計控制信號uc1,使得目標(biāo)函數(shù)J取得最小值,J通常取如下形式:

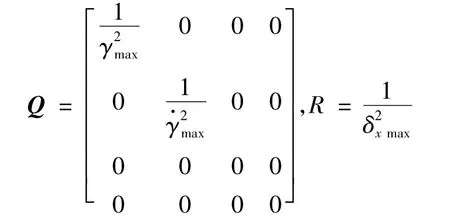
式中 Q和R為所選擇的加權(quán)矩陣和加權(quán)系數(shù)。
Q陣所有元素均非負,R為大于0的實數(shù),分別取Q 和 R 為[12]
通過求解代數(shù)Riccati方程:

便可得J取得最小值的解:

控制信號中干擾補償項uc2取

將uc=uc1+uc2代入式(10)可得

所以uc能保證系統(tǒng)(10)對外界擾動和自身未建模動態(tài)具有強魯棒性。
依據(jù)文獻[13],當(dāng)系統(tǒng)存在未知干擾和未建模動態(tài)時,利用觀測狀態(tài)設(shè)計的控制系統(tǒng),其性能要優(yōu)于直接利用系統(tǒng)實際狀態(tài)所設(shè)計的控制系統(tǒng)。而且在導(dǎo)彈的實際飛行過程中,xp和ds并不能直接獲取。為此引入ESO完成對系統(tǒng)狀態(tài)的估計并將估計狀態(tài)值用于狀態(tài)反饋。
結(jié)合式(3)和式(11),取 gi(eo1)=eo1,得

式中 Hk=[β1β2β3β4β5]為待確定的觀測增益向量,通過式(17)可完成對系統(tǒng)狀態(tài)的估計。
3.2 穩(wěn)定性分析
如上節(jié)所述,因彈性或外界擾動帶來的偏差,可在控制信號中加以補償。根據(jù)式(17)所估計狀態(tài),控制算法為

將式(17)代入式(8)得


聯(lián)立式(18)和式(19)得

由式(20)可看出,其系統(tǒng)矩陣為三角塊矩陣,故其特征值僅由主對角線上各矩陣塊的特征值決定,即由Ap-BpK和Apk-HkCpk的特征值決定。
根據(jù)上節(jié)的分析,Ap-BpK的特征值均具有負實部,所以若Apk-HkCpk的特征值具有負實部,則系統(tǒng)(20)漸近穩(wěn)定。
由以上分析可知,保證系統(tǒng)穩(wěn)定的前提是矩陣Apk-HkCpk的特征值具有負實部,而矩陣Apk-HkCpk的特征值可任意配置的前提是(Apk,Cpk)可觀測。
下面證明(Apk,Cpk)亦可觀測。
證明:定義 ei,i=1,2,…,5 為第 i行元素為 1,其他行元素均為0的列向量,則Apk和Cpk可分別表示為

式中 z1和z2分別為的第4列和第5列。
可觀測性判定矩陣V如下所示:

不難發(fā)現(xiàn),rank(V)=5,故(Apk,Cpk)可觀測。
由于(Apk,Cpk)可觀測,故矩陣 Apk-HkCpk特征值可任意配置。Hk陣參數(shù)的選取應(yīng)遵循觀測器響應(yīng)速度比狀態(tài)反饋系統(tǒng)的響應(yīng)速度快的原則[8]。不難求解,依據(jù)控制算法式(14),標(biāo)稱系統(tǒng)的極點被配置在-30,-202,-104.24±j182.91。由于其主導(dǎo)極點為-30,所以將矩陣Apk-HkCpk特征值配置在-45,便可得到觀測矩陣Hk。
4 仿真結(jié)果及分析
為了便于驗證本文所設(shè)計的控制算法的優(yōu)越性,分別在以下3種情形下進行仿真:情形一為標(biāo)稱狀態(tài);情形二為僅考慮彈性干擾;情形三為同時考慮彈性干擾、外界擾動和陀螺的動態(tài)特性。仿真中模型參數(shù)取表1中的數(shù)值,系統(tǒng)初始狀態(tài)設(shè)為:xp0=[5° 0 0 0],仿真結(jié)果見圖1~圖4。
針對標(biāo)稱系統(tǒng),利用系統(tǒng)的實際狀態(tài)進行反饋,采用LQR控制,系統(tǒng)具有良好的動態(tài)性能,消除5°初始滾轉(zhuǎn)角所需調(diào)節(jié)時間不大于0.15 s,且副翼偏角小于其最大容許值,如圖1(a)所示;但考慮彈性干擾時,若仍采用LQR控制,系統(tǒng)將不穩(wěn)定,如圖1(b)所示。
基于Luenberger全維狀態(tài)觀測器(LO)對系統(tǒng)狀態(tài)估計,并將估計值用于LQR控制中,當(dāng)僅考慮彈性干擾時,系統(tǒng)漸近穩(wěn)定,如圖2(a)所示;但若同時考慮彈性干擾和外界擾動的情況下,基于LO狀態(tài)觀測器的LQR控制不但不能消除初始滾轉(zhuǎn)角,反而使其增大到超過10°,如圖2(b)所示。
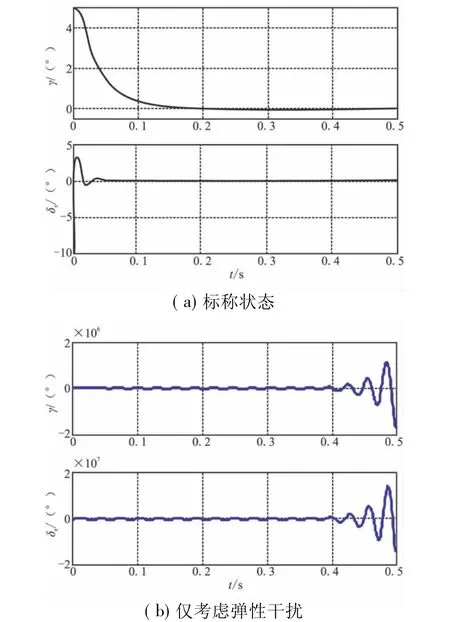
圖1 采用LQR時γ和δx變化曲線Fig.1 Curves of γ and δxwith LQR
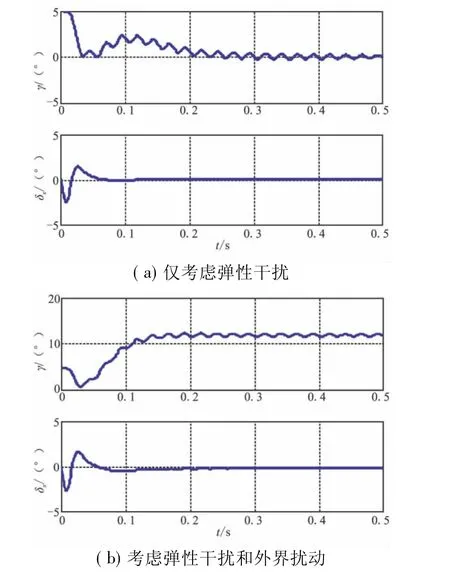
圖2 采用LQR+LO時γ和δx變化曲線Fig.2 Curves of γ and δxwith LQR+LO
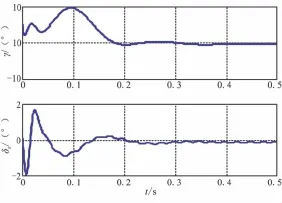
圖3 情形三下采用LQR+ESO時γ和δx變化曲線Fig.3 Curves of γ and δxwith LQR+ESO in No.3 condition
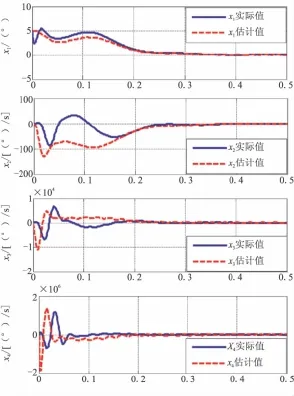
圖4 情形三下ESO系統(tǒng)狀態(tài)估計值與實際值比較圖Fig.4 Comparison between estimated value with ESO and actual value in No.3 condition
圖3和圖4為同時考慮彈性干擾、外界擾動和陀螺的動態(tài)特性情況下的部分輸出曲線,可看出,ESO狀態(tài)觀測器能準(zhǔn)確估計系統(tǒng)的實際狀態(tài)和復(fù)合干擾,基于ESO估計狀態(tài)的控制算法能消除彈性和外界擾動等因素帶來的影響,保證滾轉(zhuǎn)角在最短時間內(nèi)收斂于零,且副翼偏角在其最大容許值以下。此外,在情形三下,取表1中模型參數(shù)40%的攝動值,基于ESO估計狀態(tài)的所設(shè)計的LQR控制算法同樣具有較好的控制效果,但由于篇幅所限,這里未能給出相應(yīng)曲線。
5 結(jié)論
本文設(shè)計了一種基于ESO的導(dǎo)彈滾轉(zhuǎn)魯棒自動駕駛儀設(shè)計方法。仿真結(jié)果表明,在同時考慮彈性干擾、外界擾動和陀螺動態(tài)特性的情況下,所設(shè)計ESO狀態(tài)觀測器能準(zhǔn)確估計系統(tǒng)的狀態(tài)及干擾,控制算法能消除復(fù)合干擾帶來的影響,具有良好的動態(tài)特性和強魯棒性,從而克服了傳統(tǒng)設(shè)計方法的缺陷,能保證導(dǎo)彈在高機動和強干擾下滾轉(zhuǎn)通道的快速穩(wěn)定。
[1]Lee C H,Shin M H,Chung M J.A design of gain-scheduled control for a linear parameter varing system:an application to flight control[J].Control Engineering Practice,2001,32(9):11-12.
[2]Tan F,Duan G R,Zhao L J.Robust controller design for autopilot of a BTT missile[C]//Proc.of the 6th World Congress on Intelligent Control and Automation.2006(21-23):6358-6362.
[3]Kumaresan N,Balasubramaniam P.Optimal control for stochastic linear quadratic singular system using neural networks[J].Journal of Process Control,2009,19(7):482-488.
[4]Hall C E,Shtessel Y B.Sliding mode disturbance observerbased control for a reusable launch vehicle[C]//AIAA Guidance Navigation and Control Conference and Exhibit.Reston:AIAA,2005:1-26.
[5]White B A,Bruyere L,Tsourdos A.Missile autopilot design using quasi-Lpv polynomial eigenstructure assignment[J].IEEE Transactions on Aerospace and Electronic Systems,2007,43(4):1472-1483.
[6]Batool Labibi,Horacio J M,Chen T W.Decentralized robust output feedback control for control affine nonlinear interconnected systems [J].Journal of Process Control,2009,19(3):865-878.
[7]Trottemant E J,Scherer C W,Weiss M,et al.Robust missile feedback control strategies[J].Journal of Guidance,Control,and Dynamics,2010,33(6):1837-1846.
[8]韓京清.自抗擾控制技術(shù)[M].北京:國防工業(yè)出版社,2008:183-197.
[9]Gao Z Q,Huang Y,Han J Q.An alternative paradigm for control system design[C]//Proceedings of IEEE Conference on Control and Decision.Orlando,2001:4578-4585.
[10]錢杏芳.導(dǎo)彈飛行力學(xué)[M].北京:北京理工大學(xué)出版社,2008:248-255.
[11]胡壽松.自動控制原理[M].北京:科學(xué)出版社,2005:489-491.
[12]Nesline F W,Wells B H,Zarchan,P.Combined optimal classical approach to robust missile autopilot design[J].Journal of Guidance,Control and Dynamics,1981,4(3):316-322.
[13]Zaks S H,Brehove J D,Corless,M J.Control of uncertain systems with unmolded actuator and sensor dynamics and incomplete state information [J].IEEE Transcations on Systems.Man and Cybernetics,1989,19(2):241-257.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17