基于微處理器的精密長程連續(xù)檢測儀的研制
2011-09-03 10:50:12羅向東徐曉秋趙孝文
黑龍江科學 2011年3期
羅向東,徐曉秋,趙孝文
(1黑龍江省科學院科技孵化中心,黑龍江哈爾濱150090;2黑龍江省科學院技術物理研究所,黑龍江哈爾濱150086)
隨著科技的不斷發(fā)展,自動化水平的不斷提高,工業(yè)過程控制中對物位監(jiān)測及自動控制的要求越來越高,國內(nèi)物位控制儀表研究人員對可實現(xiàn)閉環(huán)控制的連續(xù)物位控制儀表進行了大量的研究。目前國內(nèi)應用的連續(xù)物位監(jiān)測儀表主要有射線式,電容式,雷達式,超聲波等幾類,因其使用功能、環(huán)境、應用領域的不同存在各式各樣的局限性。射頻導納物位儀表是從電容式物位測量技術發(fā)展起來的,該類儀表具有防掛料、可靠性高、測量準確、應用廣泛等特點。
1 測量原理
檢測儀的測量結(jié)構如圖1所示。物位的確定是由探頭和步進電機兩部分綜合決定的。長短雙射頻導納傳感器探頭根據(jù)邏輯關系確認物位的界面;步進電機通過變速器、線輪帶動探頭運動,步進電機與線輪的轉(zhuǎn)數(shù)比是一個常數(shù),線輪的周長也是一個常數(shù),故而探頭移動的距離(也就是物位)只與步進電機運動的步數(shù)相對應。因此確定了按表1的數(shù)字邏輯關系控制探頭運動,并計算步進電機運動的步距數(shù),即可達到隨動測量物位的目的。

圖1 測量原理示意圖Fig.1 Schematic diagram of measurement
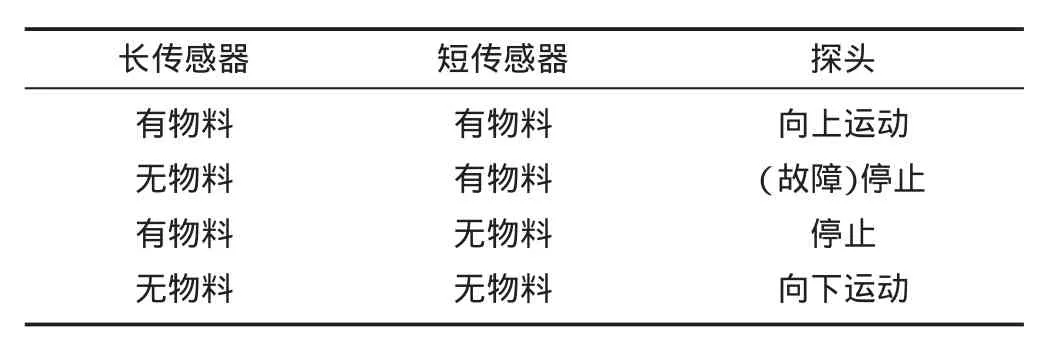
表1 傳感器狀態(tài)與探頭運行的關系表Table 1 Therelationshipbetweensensorstatusandtheproberunlist
2 儀表設計
檢測儀按結(jié)構可分為雙極射頻傳感器探頭和主機兩部分。主機和探頭之間通過1條4芯的電纜連接。當系統(tǒng)工作后,探頭內(nèi)的微處理器分別將兩個傳感器接收到的工作頻率信號直接采集后,通過485接口輸出到總線上,傳感器接收到的信號經(jīng)定時采樣后,送主控板進行數(shù)據(jù)處理,處理的結(jié)果經(jīng)邏輯判斷控制步進電機的轉(zhuǎn)動狀態(tài),根據(jù)步進電機轉(zhuǎn)動的角度計算傳感器位移的距離,LED顯示計算結(jié)果和4~20mA輸出。
2.1 探頭設計
探頭內(nèi)部主要由兩個射頻傳感器、微處理器和接口芯片組成。
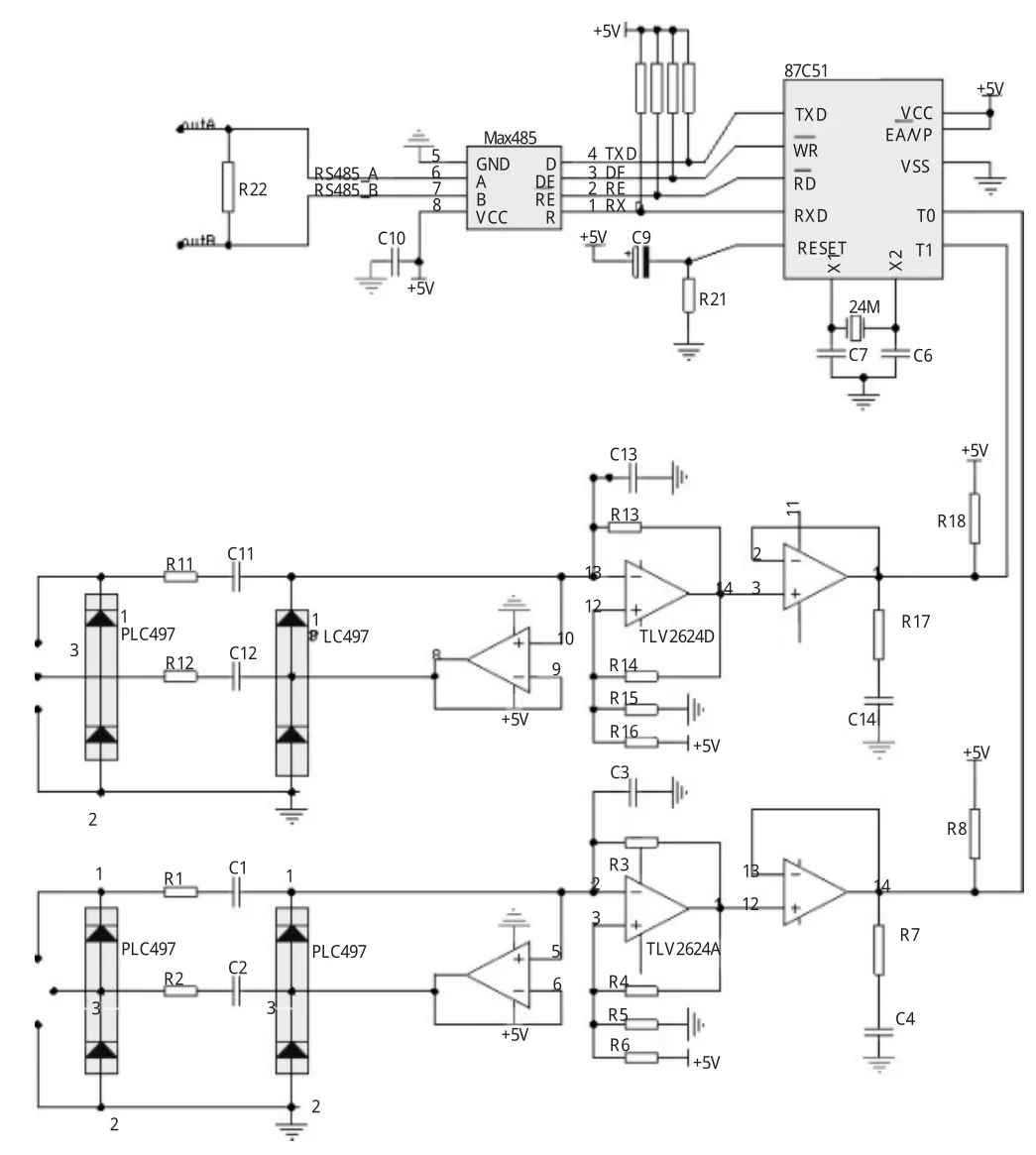
圖2 傳感極電路原理圖Fig.2 Sensing pole circuit diagram
圖2所示為傳感極電路原理圖,PLC497、R1、R2、R11、R12、C1、C2、、C11、C12是考慮電磁兼容而設計的,因傳感器有時會在帶有強靜電場所應用,抑制消除這種干擾是很必要的;運算放大器TLV2624、R3、R4、R5、R6、R13、R14、R15、R16、C3、C13組成兩個橋式振蕩器,正反饋支路的電阻R阻值相同,負反饋支路是RC網(wǎng)絡,當震蕩器穩(wěn)定工作后,產(chǎn)生波形的占空比為1∶1;4個射極跟隨器分別將信號相互隔離;芯片89C51通過編程將兩路頻率信號分別定時采集處理后發(fā)送出去;C6、C7、24M組成時鐘電路;C9、R21是通電復位;芯片MAX485、R22是總線收發(fā)器,通過它將CPU送來的信息發(fā)送到485總線上。
2.2 主機設計
主機由主控器、步進電機和電機驅(qū)動器、減速器和機械傳動系統(tǒng)等組成。如圖3,后面分別介紹。
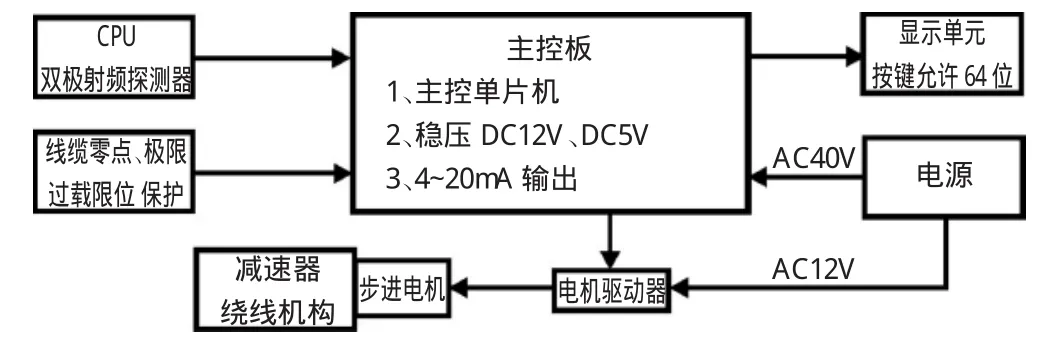
圖3 主機結(jié)構示意圖Fig.3 Schematic diagram of the host
2.2.1 主控板
主控板是整個儀表的核心,由微處理器、RS485接口芯片、數(shù)據(jù)掉電保存芯片、電機數(shù)字邏輯控制電路、輸入和輸出光電隔離、4~20mA輸出、電源轉(zhuǎn)換等功能模塊組成[1]。
其中微處理器完成電機控制、探頭信號的輸入和計算、物位結(jié)果的顯示和輸出、參數(shù)的輸入等功能。微處理器采用ATMEL的89C55單片機芯片[2]。
電機數(shù)字邏輯控制電路具有根據(jù)上下限位行程開關的狀態(tài),從硬件上保證步進電機的驅(qū)動信號正確的輸出。如:當探頭向上運動時,如果觸發(fā)上限位保護的行程開關,則步進電機向上的脈沖信號無法發(fā)出,不過電機向下運動的脈沖信號依然可以發(fā)出。電機數(shù)字邏輯控制電路由3片數(shù)字邏輯門電路74LS04、74LS32、74LS08組成。
光電隔離模塊是提供將主控板與各外部功率元件連接起來,并有效隔離干擾的必備部分。
電源轉(zhuǎn)換提供給系統(tǒng)DC5V和DC12V的電源。
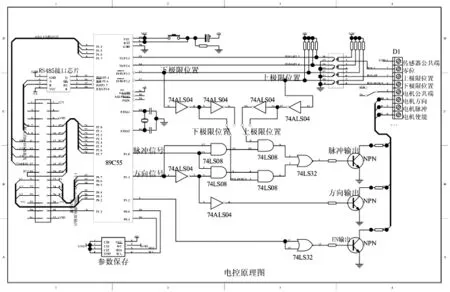
圖4 主控板電路原理圖Fig.4 C ontrol board circuit diagram
2.2.2 步進電機及相關設備
步進電機選用了34HS300CZ二相混合式步進電機,最大靜轉(zhuǎn)矩4.0N·m,最大空載起動轉(zhuǎn)速252r/min;驅(qū)動器選擇MS-2H090M二相電機驅(qū)動器,細分數(shù)分為16檔,最小步距角0.009°,最大步距角0.9°,電機工作時步距角為0.09°。減速器為10∶1的蝸輪蝸桿鋁合金減速器。單片機的工作頻率為24M。
本課題中,步進電機、減速器、驅(qū)動器和單片機的工作頻率的選取是極為關鍵的。這幾個設備相互關聯(lián),直接影響到儀表的測量精度、跟蹤速度、負載能力、工藝體積、產(chǎn)品成本等關鍵的性能。下面就這幾個關鍵設備的選取進行說明。
第一.步進電機的負載能力(即所需要的扭矩)。為簡化計算,以探頭和輪盤的慣性重量合計估算為10kg(以拉力秤在輪盤上快速拉動測出);線輪的圓周為1m,則力臂長度為0.16m。
扭矩=拉力×力臂=1.6N·m
第二.步進電機的最高運行轉(zhuǎn)速。以在3min之內(nèi)運動15m測量距離計算,1r為1m,
轉(zhuǎn)速=15/3=5r/min
為了選取合適的電機(電機越大,價格越貴),還要考慮加配減速裝置,表2為加配減速器后對電機性能的要求:
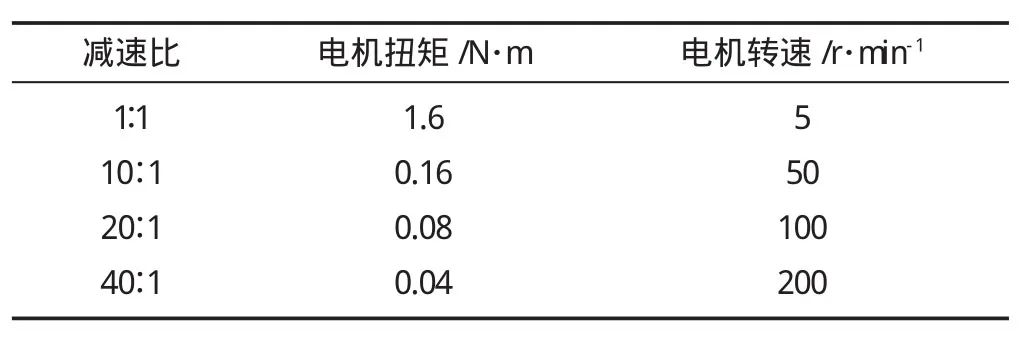
表2 電機性能表Table 2 Motor performance table
第三.測量精度的保證。步進電機是一種作為控制用的特種電機,它的旋轉(zhuǎn)是以固定的角度(稱為“步距角”)一步一步運行的,其特點是沒有積累誤差,所以廣泛應用于各種閉環(huán)控制。本項目采用步進電機目的也在于在一個長距離的測量范圍內(nèi)保持測量精度。粗步概算一下,如果步進電機的步距角0.09°,減速比合計為20∶1,繞線輪直徑為1m,則有探頭每運動1m,步進
電機行走數(shù)為 360°/0.09°×20/1=80000。
傳動誤差可忽略,誤差為1000/80000=12.5nm,可以看出檢測儀的測量精度是相當高的。
第四.跟蹤速度。儀表除了要滿足測量精度外,跟蹤物位的速度也很關鍵。由于控制電機的轉(zhuǎn)速是由單片機完成,除此之外單片機還要完成其他控制功能,故而電機程序的系統(tǒng)占用率不宜太高,相應的步進電機步距角就不能太小。表3為單片機控制MS-2h090驅(qū)動器在不同的細分條件下所能達到的步進電機的極限頻率。
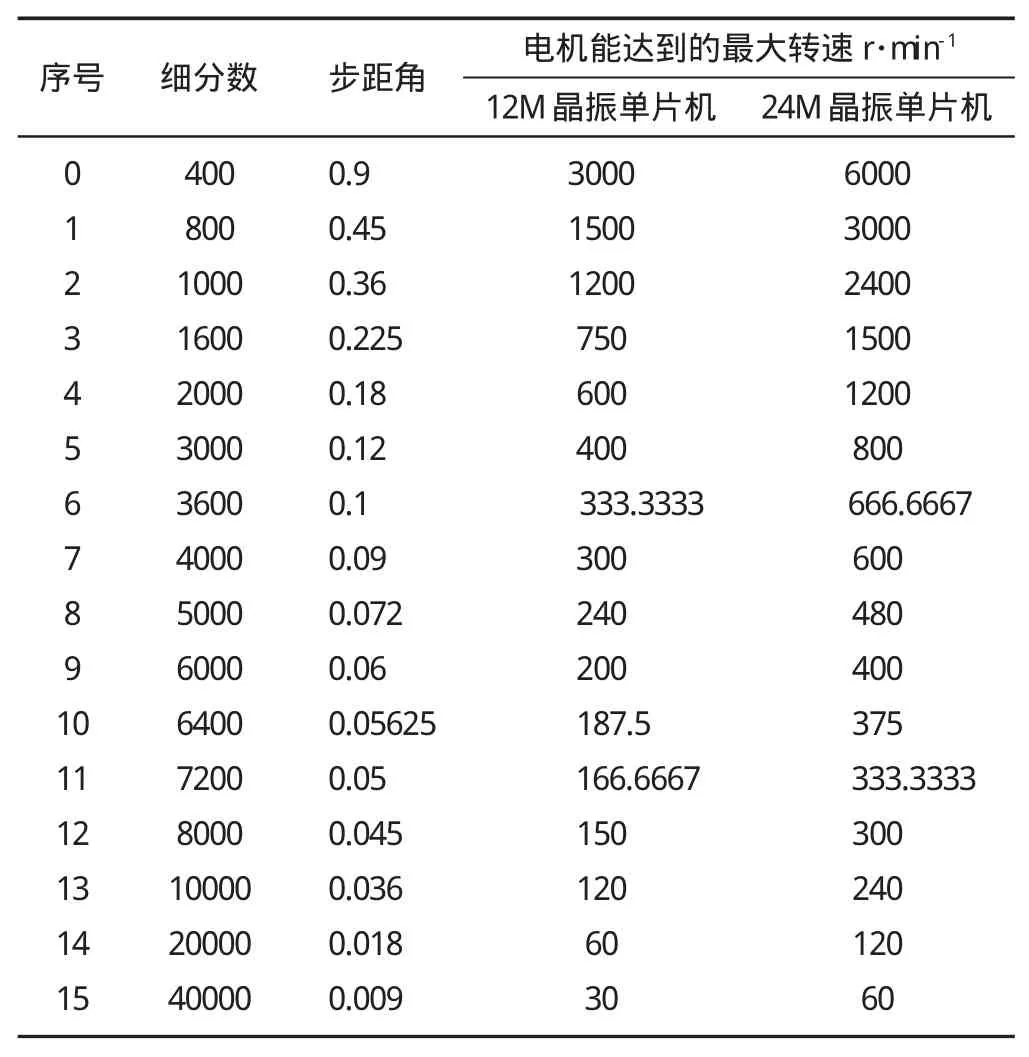
表3 電機最大轉(zhuǎn)速與單片機晶振頻率的關系Table 3 The relationship between the microcontroller crystal frequency and the maximum motor speed
綜合考慮各個因素,并通過試驗,工作時步進電機運行速度最高300r/min、步距角0.09°、扭矩0.16N·m,單片極工作頻率24M。從現(xiàn)場使用情況看,儀表的各項性能都達到了設計目的。
2.2.3 機械結(jié)構和原點行程開關

圖5 行程開關位置示意圖Fig.5 Schematic position limit switch
檢測儀的機械結(jié)構如圖5所示。線輪的左側(cè)為齒輪,受步進電機的傳動齒輪驅(qū)動。線輪中間套扣,與中間的固定絲杠咬合在一起。按圖5示位置,線輪轉(zhuǎn)動時,除了帶動探頭上下運動外,還沿著固定絲杠水平方向移動。
此種機械結(jié)構設計有三個好處:
①保證了線輪到出線口的連線始終與固定絲杠相垂直,從而使得探頭的連線均勻的繞排在線輪上;
②由于出線口位置固定,儀器的防塵很容易設計,有效解決了防塵的工藝問題;
③線輪的水平方向移動使得各個行程開關的安裝相當?shù)娜菀祝鐖D所示,無需在儀表外部添加任何設計即可安裝好行程開關。
3 軟件設計和人機操控界面
軟件以C語言作為編程語言,采用模塊化程序設計。主要是完成電機升降控制、數(shù)據(jù)的采集、分析、運算。對儀表中各個器件的初始化、數(shù)據(jù)顯示、按鍵的處理、以及數(shù)據(jù)存儲等等[3]。
具體見程序流程圖:
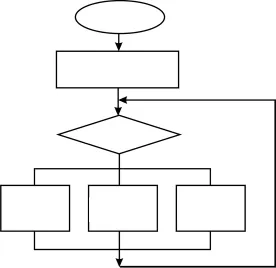
圖6 主程序流程圖Fig.6 The main program flow chart
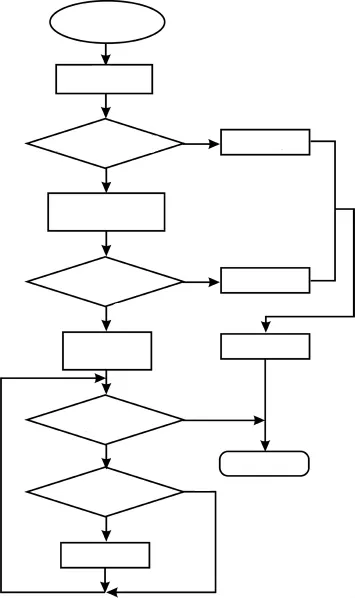
圖7 運行測量流程圖Fig.7 The operation flow measurement
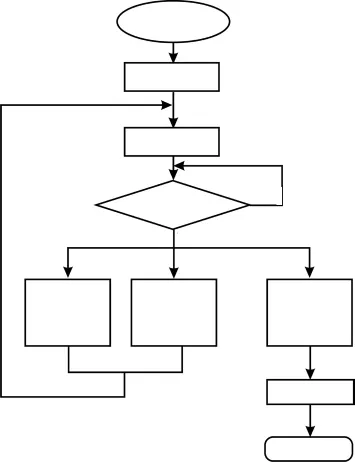
圖8 修改參數(shù)流程圖Fig.8 Modification parameters flow
4 結(jié)束語
精密長程連續(xù)檢測儀采用雙射頻導納傳感器、光電信號傳輸、微處理器、電機跟蹤傳動、軟件編程等各種技術相結(jié)合,實時跟蹤被檢測物位。雙極探測和步進電機隨動跟蹤技術的有機結(jié)合及機電一體化的應用。使該儀表具有很高的靈敏度,測量范圍長、抗干擾性強。儀表已于發(fā)電廠的灰?guī)爝M行了實際應用,取得了很好的應用效果。
[1]馬忠梅,籍順心,張凱,等.單片機的c語言應用程序設計[M].北京:航空航天大學出版社,1999.
[2]ATMEL 89C52用戶手冊[Z].Atmel Corporation,2010.
[3]姜志海,趙艷雷.單片機的c語言設計程序設計與應用[M].北京:電子工業(yè)出版社,2008.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年12期)2018-08-01 00:48:04
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電子制作(2017年19期)2017-02-02 07:08:27
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
