美國的空間交會對接技術
2011-12-07 05:14:18□博引
太空探索 2011年10期
□ 博 引
為了給“阿波羅”登月計劃作技術準備,美國研制和發射了“雙子星座”系列兩艙式飛船,用于突破和掌握太空行走和空間交會對接技術。1966年3月,美國“雙子星座”8號飛船與由“阿金納”火箭末級改裝的目標航天器實現了世界上首次交會對接。1969年7月,美國“阿波羅”指令艙與登月艙實現了首次月球軌道人控交會對接。進入20世紀80年代,美國投入巨大的人力、物力,研究開發出世界上第一架航天飛機,為了建造國際空間站,航天飛機在20世紀90年代安裝了交會對接裝置,并分別與“和平”號空間站和國際空間站多次對接,大大擴大了航天飛機的用途。
世界首次空間交會對接
1966年3月16日,在航天員手控操作下,美國“雙子星座”8號飛船與“阿金納”目標航天器完成了世界首次空間交會對接。其交會測量系統采用微波雷達、電視攝像機,目標航天器上還裝有應答機。對接操作采用自動、手動兩種方式,此后,“雙子星座”,又成功進行了3次空間交會對接。
“阿波羅”飛船的交會對接
“阿波羅”登月飛船往返月球一次,需在空間進行兩次交會對接。第一次是指令艙在地球軌道分離后調頭180°,指令艙與登月艙對接;第二次是登月艙由月球返回時與月球軌道上的指令艙對接。
在“阿波羅”飛船的登月過程中,為了保證在缺少地面支持的月球軌道上交會對接的安全性,其指令艙和登月艙都可作為追蹤航天器,都具備一定的自動化能力。通常,交會對接任務規劃由地面完成,但是船上系統具有對目標定位并自主機動的能力。最終的捕獲和對接則是由航天員完成的。
其交會測量系統采用X頻段交會雷達,最終采用手動完成。其對接機構采用可移開的“桿-錐”式結構。
1969年7月~1972年12月,美國先后發射了“阿波羅”11號~17號共7艘登月飛船,除“阿波羅”13號發生意外事故中止登月任務外,其余6次完全成功。這說明“阿波羅”飛船使用的交會對接技術是可靠的,且適合多次使用。
“天空實驗室”的交會對接
1973年5月,美國發射了第一座試驗性空間站——“天空實驗室”,它裝有新研制的“多用途對接艙”,能同時提供2個對接口,其交會測量系統和對接機構基本與“阿波羅”飛船所用的相同。
航天飛機的交會對接
航天飛機交會對接測量系統沿用“阿波羅”的成熟硬件,成功多次跟蹤、捕獲失控或出故障的衛星,然后將其帶回地面維修或在軌維修,最終重新發射入軌恢復工作。1995~1998年,航天飛機成功與俄羅斯“和平”號空間站進行9次交會對接;1998年~2011年,航天飛機成功與國際空間站進行37次交會對接,沒有1次失敗,這充分顯示了美國航天飛機的交會對接技術十分先進和可靠。
航天飛機的交會對接有許多新的特點。它采用了對接機構、機械臂、航天員艙外活動等不同方式實現對目標的捕獲,大大增強了其軌道服務功能。航天飛機的任務規劃仍然由地面完成,機上制導、導航與控制系統根據航天員指令可以自動執行許多交會控制功能,包括目標定位、相對導航和控制。最終逼近段仍然由航天員操作完成。
美國正在研制的“獵戶座”新一代飛船對交會對接的自動性和自主性提出了更高要求。目前在研發的關鍵技術包括自動交會制導、導航與控制算法、自主任務管理、自動相對導航敏感器技術、先進捕獲和對接機構、機械臂組裝技術。這些技術中許多已經成熟,關鍵的挑戰是要將這些技術進行集成。

“雙子星座”飛船與“阿金納”火箭交會
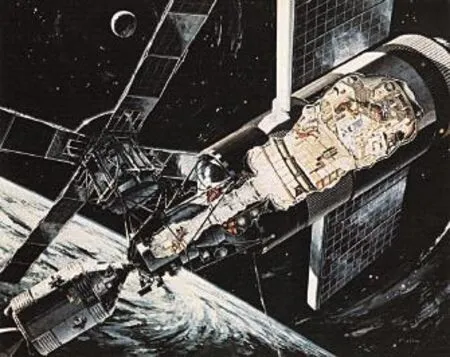
“阿波羅”號飛船與“天空實驗室”對接
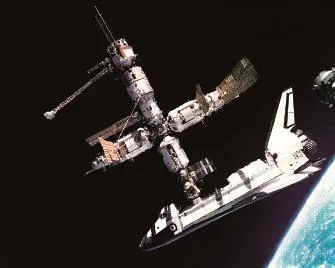
美國航天飛機與俄羅斯“和平”號空間站對接
測量系統
“雙子星座”飛船上使用的交會雷達是L頻段相干脈沖微波雷達,它包括4副天線:1副圓柱形天線用于發射脈沖信號,2副可轉動的螺旋形天線用于接收目標信號,最后1副天線作為2副可轉動天線的參照物。其作用范圍為150米~450千米,可以測出目標航天器的方位角、仰角和距離與距離速率。在目標航天器上安裝應答機,航天員根據交會雷達在儀表盤上顯示值和通過光學瞄準器目視結果,以手動方式進行交會對接操作。
“阿波羅”飛船在進行登月艙和指令艙交會對接時,使用的交會雷達是X頻段單脈沖比幅連續波雷達,它能測量登月艙相對于在150千米月球軌道上的指令艙的距離、距離變化率、角度和角度變化率。交會雷達和應答機都用固態變容二極管倍頻器作發射機,收發都用連續波方式。航天員通過光學瞄準鏡以手動方式進行交會對接操作。
美國航天飛機上使用的交會雷達是Ku頻段多功能雷達,它還具有通信和導航功能,該雷達利用脈沖往返時間測量距離,利用載波多普勒頻移測量速度,利用單脈沖比幅測量角度,系統采用合作應答方式,作用距離為30米~550千米。在逼近階段再輔以激光測距儀、攝像機等光電設備,并由航天員根據顯示屏的顯示結果和光學瞄準器操縱航天器實現對接。
航天飛機與俄羅斯“和平”號空間站的交會時,航天飛機是追蹤航天器,空間站是目標航天器。軌道高度為370千米~400千米、傾角51.6°。在它們相距180千米時,采用甚高頻無線電設備進行聯系;在65千米~33米時采用交會雷達進行測量,航天飛機的交會雷達到目標航天器的使用限制距離為33米,距離再近對雷達來說是盲區。在對接前,即在距目標器800米時改為航天員手動操作。在33米以內時采用激光測距儀和光學攝像機進行測量,拍攝2個航天器的相對姿態和位置。
國際空間站的交會測量系統包括GPS導航接收系統、中繼衛星導航與通信接收系統、微波交會雷達系統、激光對接雷達系統、光學對接攝像系統等。此外還包括航天員顯示裝置(空間六分儀、望遠鏡、顯示器、熒光屏等)。
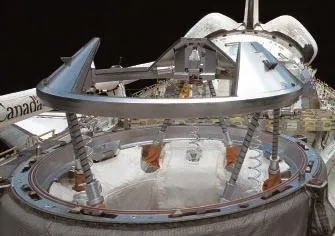
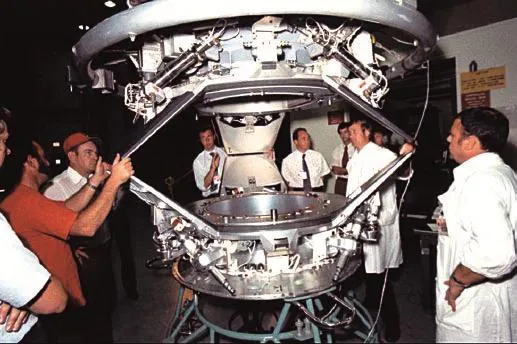
航天飛機上的“異體同構周邊”式對接機構
對接機構
美國“雙子星座”飛船采用“環-錐”式對接機構,尺寸和質量均較大。它由一個捕獲環構件和一個對接錐結構組成。捕獲環(被動部件)裝在“雙子星座”號飛船的通道口上,“阿金納”火箭尾部裝一個大型的對接錐(主動部件)。對接采用自動和手動兩種操作,對接后自然形成航天員通行通道。
“阿波羅”飛船采用“桿-錐”式對接機構,結構簡單、重量輕,其主動部件裝在指令艙上,被動部件安裝在登月艙上。對接中產生的撞擊由彈簧和氣液緩沖裝置進行緩沖和阻尼。對接時需要航天員花費較多時間、消耗很大體力通過手動實現對接。這種對接機構還用于“天空實驗室”。
1975年美國“阿波羅”18號飛船與蘇聯“聯盟”19號飛船對接時首先使用了“異體同構周邊”式對接機構。1995年航天飛機與俄羅斯“和平”號空間站首次對接,采用了改進的“異體同構周邊”式,把導向器由外翻式改為內翻式,由此可以提高對接剛度和密封性,更適用于大型的航天器。美國航天器對接時都采用手動。
“異體同構”是指追蹤航天器和目標航天器上的對接機構構造是一致的(桿-錐式對接機構是不一致的),沒有主動、被動之分。“周邊”是指機構不設置在中間,而是設置在周邊(桿-錐式是設置在中間),全部對接機構設置在航天器殼體外側。“異體同構周邊”式對接機構的優點是機構不占用航天器內部空間,對接后通道暢通,對接連接環直徑較大,承載能力大,適宜大質量航天器間對接。其缺點是結構比較復雜,質量較大。對接時,追蹤航天器上的對接機構伸出,安裝在周邊的3個板狀導向器完成導向作用,使兩個對接機構準確地接觸,其上的鎖鎖定,對接機構回縮,將對接面拉緊,對接面上的鎖將對接面鎖定,完成對接。
試驗美蘇飛船對接用的“異體同構周邊”式對接機構

航天飛機與國際空間站對接(同時還對接有俄羅斯和歐洲的飛船)
仿真設備
美國自20世紀60年代初開始研制交會對接仿真設備,先后開發了4種,其中技術最先進的是航天飛機與空間站實時停靠和全自主交會對接仿真器。
“雙子星座”飛船交會對接仿真器是通過閉路電視產生目標航天器的計算機動畫圖像模型的仿真器,共有9個自由度,其中追蹤航天器(“雙子星座”飛船)3個自由度,目標航天器(“阿金鈉”火箭)6自由度(三維位置和三軸姿態角),仿真距離為0~300米。
“阿波羅”飛船交會對接仿真器是一種混合式交會對接仿真器,有6個自由度,其中追蹤航天器上配置的錐型對接機構為2自由度,配置在目標航天器上的錐型對接機構為4自由度。通過液壓驅動,這種仿真器可對全尺寸對接機構進行動力學仿真。可驗證對接機構以及該機構的手爪在各種條件下張開、閉合、鎖緊功能。
航天飛機實時停靠仿真器是12自由度的交會對接仿真器,其中追蹤航天器為6自由度,目標航天器為6自由度,采用“阿波羅”18號和“聯盟”19號飛船進行交會對接仿真試驗時所使用的對接動力學仿真設備,所能承受的最大沖擊力為1350千克。美國用它對手動和自動對接方式進行了大量的仿真試驗,對航天員熟悉與掌握交會對接停靠技術發揮了重要作用。
全自主交會對接仿真器用于滿足交會對接在安全、容錯、可靠性等方面的要求,將新老技術融為一體,以半物理仿真為核心,完成從最終逼近到對接階段的各種試驗。全自主交會對接仿真器用氣浮臺(3自由度)和臺子上的移動臺車(3自由度)以無線傳輸方式發射和接收遙操作所需的各種信息,并利用機器人臂模擬目標航天器運動,完成從40千米到實現對接的全過程仿真。由于采用GPS接收機、光學敏感器、動態目標仿真器等,因此使用中即使在系統出現故障的情況下,仍可完成安全停靠、交會對接的仿真。該仿真器系統不僅能驗證GPS、交會雷達等新型敏感器以及自主任務規劃算法等新技術,還能連續地監視人在回路中的操作控制技術。
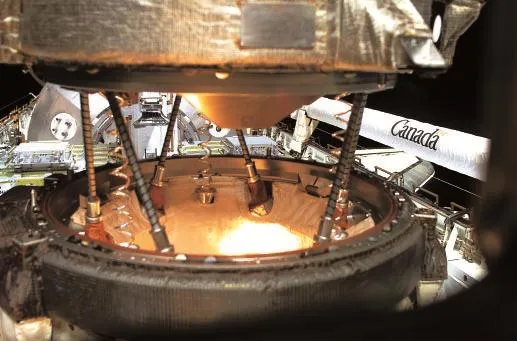
美國“團結”號節點艙1號與航天飛機對接機構實現對接

“阿波羅”18號飛船前部安裝的“異體同構周邊”式對接機構
對接故障
在航天飛機使用以前,美國只發生過2次交會對接故障:
1966年6月3日,美國發射了“雙子星座”9號載人飛船。該飛船在與由“阿金納”火箭第3級改裝的目標飛行器進行交會對接時,由于“阿金納”彈射罩出現故障,使“阿金納”成半開狀態,所以對接無法進行。飛船上的航天員斯坦福爾德和塞爾南打算出艙修理,但又因艙外航天服的環控生保系統不能散熱,頭盔面罩內布滿霧氣,無法看清東西,所以沒有獲得成功,對接失敗。“雙子星座”9號于6日返回地面。
“阿波羅”14號飛往月球的過程中,在指令艙與登月艙對接時,由于對接機構出現故障,因而多次對接失敗,直到第6次試接后才獲得成功,使得正常情況下只需25分鐘的對接花了近2小時。為了避免同樣的故障再次發生,后來的航天器上都采取了改進措施,包括在發射前對容易出問題的對接機構進行密封保護、改進對接鎖定裝置和增加模擬測試。
經驗借鑒
美國航天器在交會時采用多種測量敏感器:遠距離用交會雷達自動進行,近距離采用激光測距儀和攝像機等,而且有航天員參與,從而保證交會對接任務能夠順利執行。這樣既比較安全可靠,又能保證足夠精度,且可實現軟對接。由于在最終逼近階段需航天員采用手動實現交會對接,所以航天員要在地面上進行多次操作培訓仿真試驗,有時需要作幾百或上千小時操作仿真實驗。
美國航天器在空間交會對接時采用遠距離自動、近距離手控的方式,是從實際的技術把握性、安全可靠性和成本經濟性等方面全面考慮的。近距離一般指0.5千米~1千米之間,手動操作主要是控制相對距離和相對靠近速度,而相對姿態還可以實現自動控制。
美國交會對接飛行程序和操作方案能適應多種客觀條件和狀態改變的需要,例如發射時間推遲、追蹤器入軌狀態改變、設備故障等。
“異體同構周邊”式對接機構的3個導向器外翻,允許捕獲姿態偏差范圍可以大一些;導向器內翻的好處是直徑特別大,通常直徑在3米~4米以上,可以提高對接剛度,增強對接圈和密封的強度,但要求提高終端姿態控制精度。

將“異體同構周邊”式對接機構安裝到航天飛機上