預應力混凝土連續梁懸臂施工線型監控分析研究
2012-01-15 04:41:06周世軍李興坤
四川建筑 2012年4期
朱 果,周世軍,李興坤
(1.重慶大學土木工程學院,重慶 400045;2.北京鐵路局,北京 100860)
預應力混凝土連續梁懸臂施工線型監控分析研究
朱 果1,周世軍1,李興坤2
(1.重慶大學土木工程學院,重慶 400045;2.北京鐵路局,北京 100860)
大跨度預應力連續梁懸臂施工法線型控制的主要目的是使施工實際狀態最大限度的與理想設計狀態(線形)相吻合。以寧啟線南京至南通段復線電氣化改造工程鐵路主跨64 m連續梁特大橋為背景,分析并闡述了連續梁懸臂施工法線型監控的方法及重要性。
連續梁; 懸臂施工; 線型監控
不論采用何種施工方法,橋梁結構在施工過程中總要產生變形(撓曲),并且結構的變形將受到多種因素的影響,極易使橋梁結構在施工過程中的實際位置(立面標高、平面位置)狀態偏離預期狀態,使橋梁難以順利合龍,或者是成橋線形形狀與設計要求不符。所以必須對橋梁實施線形控制,使橋梁結構在施工過程中的實際位置與預期狀態之間的誤差在允許范圍之內,成橋線形符合設計要求。
1 工程背景
寧啟線南京至南通段復線電氣化改造工程鐵路(40+64 +40)m連續梁特大橋位于江蘇省南通市海安縣境內。設計速度目標值采用客車200 km/h,貨車180 km/h,線間距4.4 m。軌道類型為有砟軌道。該橋主橋結構及箱梁截面簡圖如圖1所示。

圖1 結構簡圖
2 測點布置及測試方法
2.1 測點布置
梁上觀測點為與設計圖對應的每個梁段前端的測點,在斷面上分別為每一截面的軸線點與箱梁兩翼緣端點位置附近的點,如圖1所示。施工過程中當前施工梁段及退后所有梁段梁上豎向位移觀測點都要進行觀測。另外,在實際實施過程中,為了確保連續梁的線形,需在每個梁段的施工前、后,對梁的底模標高(橫向設了5個點)進行了控制測量,施工單位根據監控單位提供的立模預拱度由施工梁段前端斷面的尺寸推算到了梁的模板上,作為真正的立模標高,但在該梁段施工完成后又要將測點轉移到梁的頂面上。測點布置見圖2。
2.2 測試方法
2.2.1 測試周期
在施工期間,每進行一個施工循環,就進行一個循環的監測。每個循環測內容有:
(1)立模時和混凝土澆筑前測底模立模標高;
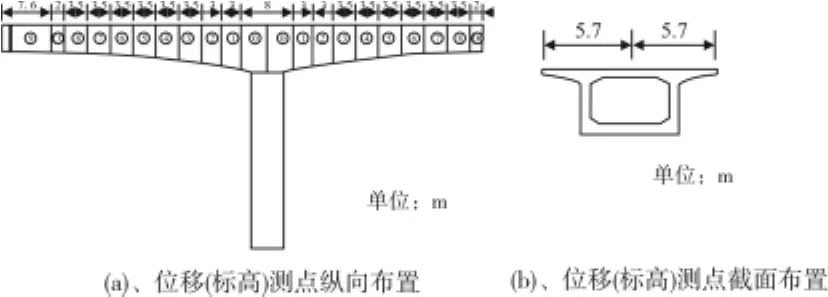
圖2 位移測點布置
(2)梁段混凝土澆筑后同時測現澆梁段底模和梁頂預埋鋼筋頭標高,并將該梁段的高程測點從梁底移至梁頂(梁頂標高還要減去露出的鋼筋頭高度);
(3)梁段混凝土澆筑后測所有已澆梁頂、梁頂測點預埋鋼筋頭標高,據此確定梁頂標高和梁的位移變化情況;
(4)在預應力束張拉前、后進行測試,以判定本循環結構上施加的荷載對結構受力與變形的影響及預應力的作用效果。
2.2.2 具體測試時間
為了消除或減弱環境溫度及氣流對測試結果的影響,每次測試時間定在大致相同的時間范圍,一般宜在早晨6:30前結束當次測試工作(高程與變形的測試宜在凌晨5:00~6:30進行)。
2.2.3 注意事項
(1)中跨與邊跨合龍前各進行主梁前端24 h變形觀測。(2)主橋合攏后、橋面鋪裝后全面進行主橋線形觀測。
3 仿真分析計算
在主梁施工開始前準確模擬整個施工過程對施工過程的控制具有重要意義。本工程采用重慶大學周世軍教授研發的大跨度橋梁施工動態過程監控仿真分析專用軟件CSB對連續梁的整個施工過程進行了分析,并對主梁施工的每一階段進行跟蹤模擬計算。參考“寧啟復線電氣化改造鐵路64 m連續梁施工工藝流程”,將64 m連續梁施工控制模擬劃分為45個計算階段。由于施工過程仿真模擬計算結果的數據量十分龐大,這里只給出三個典型階段(見表1)的計算成果,如圖3~圖8。

表1 部分動態仿真模擬結果的施工階段
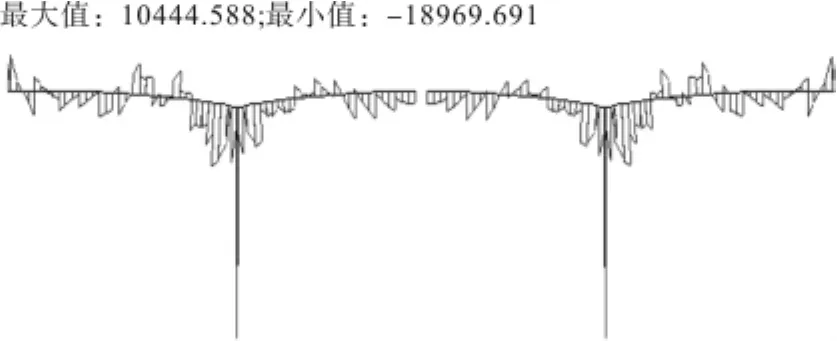
圖3 仿真分析第35階段邊跨預應力張拉后彎矩

圖4 仿真分析第35階段邊跨預應力張拉后位移

圖5 仿真分析第43階段全部預應力張拉后彎矩
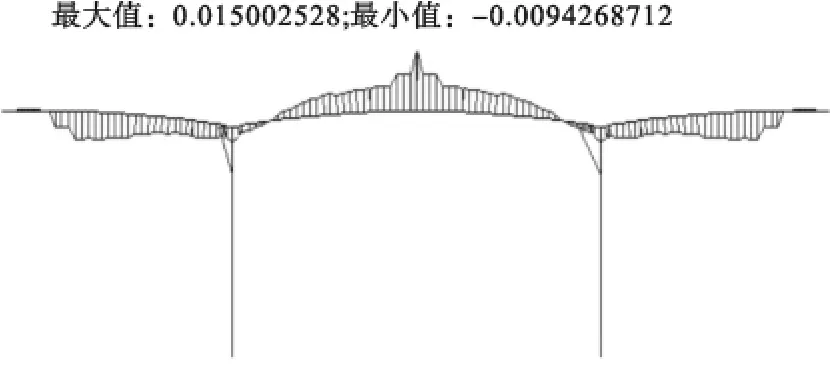
圖6 仿真分析第43階段全部預應力張拉后位移
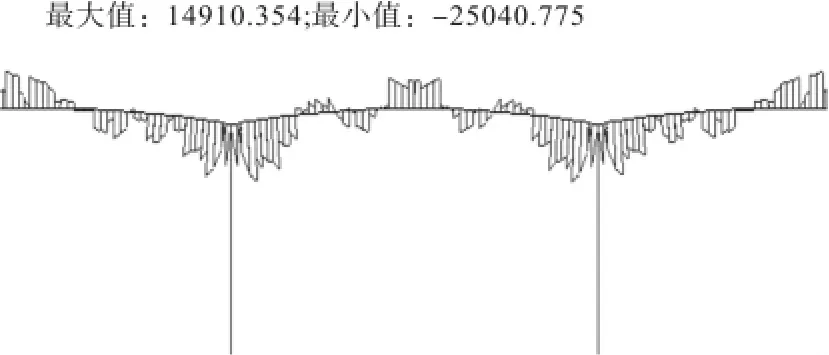
圖7 仿真分析第45階段收縮徐變完成后彎矩
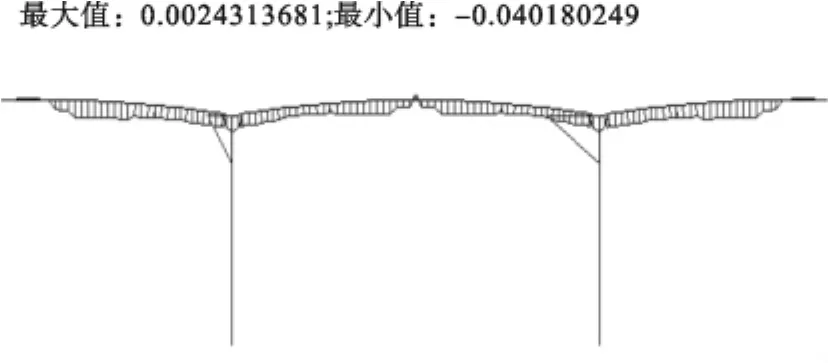
圖8 仿真分析第45階段收縮徐變完成后位移
4 線型監控結果分析
根據本文方法動態仿真模擬計算程序CSB分析的結果,可以得到寧啟復線電氣化改造鐵路(40+64+40)m連續梁施工監控預拱度和中線預偏理論預測值。這些施工監控預拱度和中線預偏理論預測值根據施工過程的實際情況和實測結果的誤差分析又進行了重新估計和調整。表2~表4給出了用CSB分析得到的幾個典型梁段的立模標高。
為了反映連續梁在整個懸臂施工過程中其標高的變化情況和施工監控的效果,圖9~圖13給出了部分施工階段主梁標高的實測值與理論值的差異曲線(標高差異=實測值-理論值,以實測值大為正)。圖14為3年后(收縮、徐變全部完成)連續梁理論拱度設置曲線。連續梁中線橫向線形的實際控制效果,如圖15所示。

表2 3#段立模標高預拱度
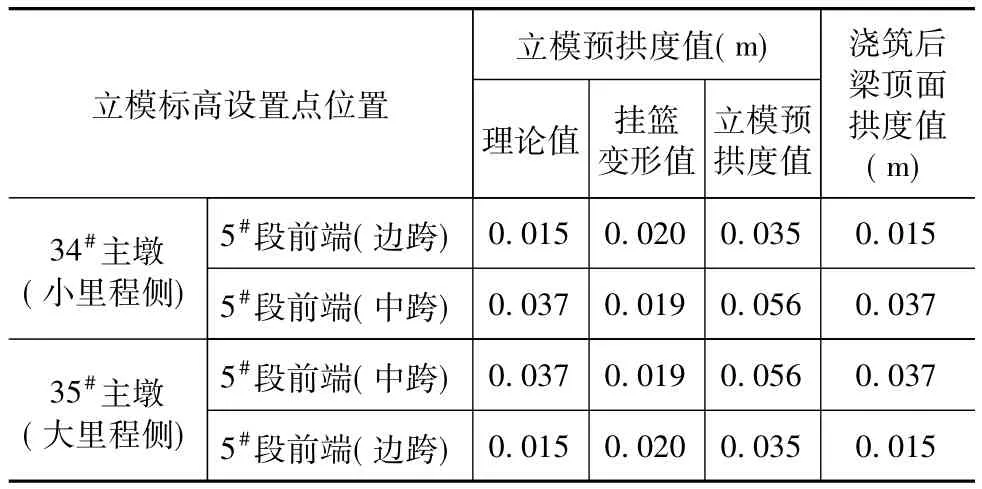
表3 5#段立模標高預拱度
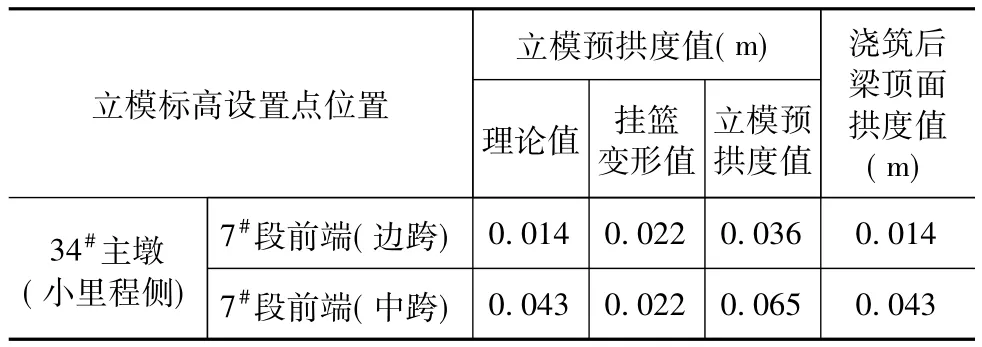
表4 7#段立模標高預拱度
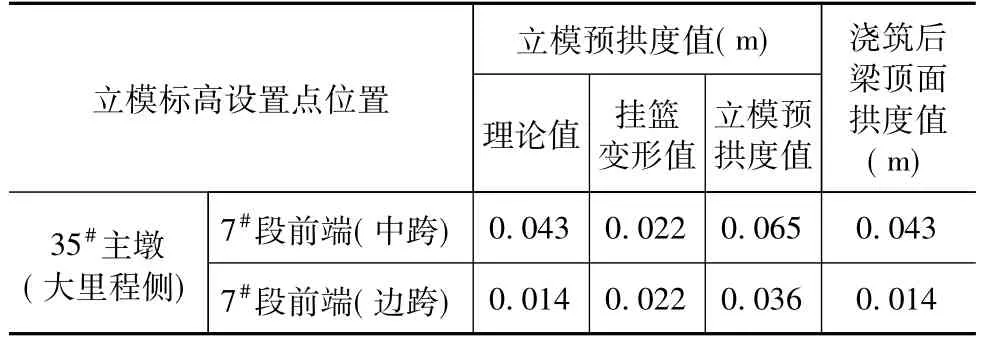
續表4
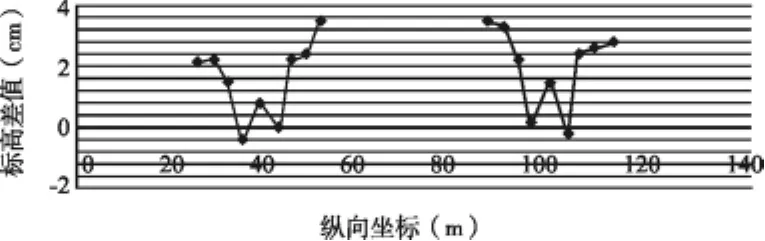
圖9 3#段張拉后連續梁標高差值曲線
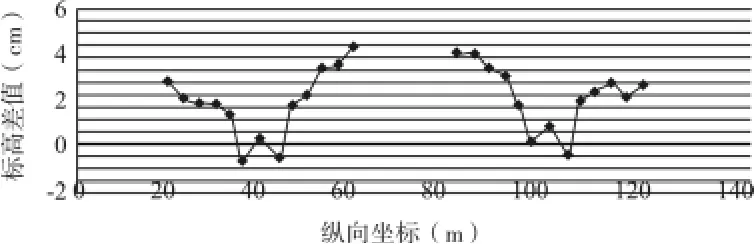
圖10 5#段張拉后連續梁高差值曲線

圖11 7#段張拉后連續梁標高差值曲線
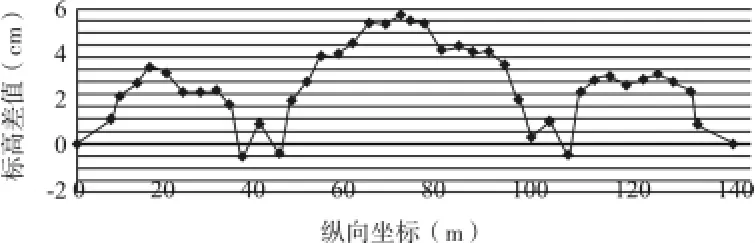
圖12 邊跨合龍后連續梁標高差異曲線

圖13 中跨合龍后連續梁標高差異曲線
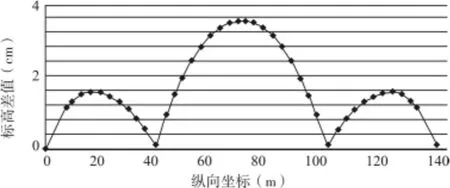
圖14 3年后連續梁監控理論拱度
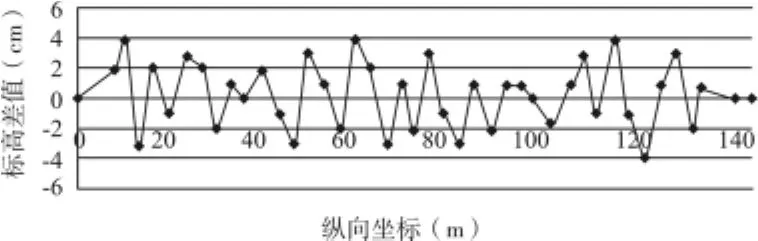
圖15 合龍后中線偏移實測結果

表5 寧啟復線電氣化改造鐵路(40+64+40)m連續梁合龍精度表(mm)
5 分析及結論
從圖9~圖14可以看出,連續梁的線形始終處于精密而可靠的控制之中。由于梁上臨時施工荷載的存在及其大小和作用位置的隨機性、溫度變化等其它影響因素的存在及其隨機特點,主梁標高在施工過程中的變化時有與理論值出現偏差的現象,但總的來說這種偏差是小的,標高誤差基本控制在-6~6 mm范圍,最大差異的絕對值也僅有8 mm,是比較小的。中線偏位左右幅均在1~3 mm范圍,且正負誤差交錯,表現出一定的隨機性,表明沒有系統誤差。說明施工控制的思路和參數量值是可靠的,誤差來源主要是施工誤差和測量等因素引起的隨機誤差,不影響整個主梁的線形。并且主梁各測點的變位在施工過程中變化的總趨勢始終與理論值相一致,表明在整個施工過程中對線形的控制是十分可靠和有效的。這為主梁最后的高精度合龍打下了非常好的基礎。主橋合龍精度如表5。主橋合龍、預應力張拉后,主梁的標高實測曲線與理論值的差異沒有大的變化,其變化規律基本與理論預測相一致。
[1] 向中富.橋梁施工控制技術[M].北京:人民交通大學出版社,2001
[2] 葛耀君.分段施工橋梁分析與控制[M].北京:人民交通出版社,2003
[3] 顧安邦,張永水.橋梁施工監測與控制[M].北京:機械工業出版社,2005
[4] 范立礎.預應力混凝土連續梁橋[M].北京:人民交通出版社,2001
[5] 張繼堯,王昌將.懸臂澆筑預應力混凝土連續梁橋[M].北京:人民交通出版社,2004
[6] 徐君蘭.大跨徑橋梁施工控制[M].北京:人民交通出版社,2002
[7] 張海龍.橋梁的結構分析、程序設計、施工監控[M].北京:中國建筑工業出版社,2003
U445.466
B
[定稿日期]2011-12-08
朱果(1987~),男,碩士研究生;周世軍,教授,博導;李興坤,助理工程師。
猜你喜歡
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年9期)2021-07-16 07:11:36
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
西安建筑科技大學學報(自然科學版)(2014年2期)2014-11-12 13:04:54
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44