航跡導航系統介紹
2012-01-22 11:24:56
船海工程 2012年3期
(南通中遠川崎船舶工程有限公司,江蘇 南通 226005)
隨著航運事業的飛速發展,船舶自動化程度的不斷提高,如何高效的操船,如何減輕船員的負擔,如何減少人為操作失誤導致的事故等,越來越多的受到業界和船東的關注。航跡導航系統(track control system, TCS)越來越多地受到船東的青睞。
1 規范要求及配置現狀
在國際海事組織下屬的海上安全委員會(海安會)第73界會議上,通過了MSC.99(73)決議,對SOLAS進行了修正。修正后的SOLAS第5章第19條2.8.2要求,1萬總t以上的船需要配置1套艏向或航跡控制系統,或其它裝置,用于自動控制和保持艏向和/或直航跡。
船廠設計標準,僅要求配置艏向控制系統(heading control system,HCS),船上都通過自動舵來實現該功能。但近來越來越多的船東為減輕船員負擔、提高船舶自動航行功能,會要求船廠在配置HCS的基礎上增加航跡控制系統(TCS)。
要實現TCS功能,船上除了自動舵等SOLAS必須配置的導航設備外,還必須加裝非SOLAS強制要求安裝的電子海圖(ECDIS)。配置了TCS功能后,一般在大洋上的開闊水域,船員可以在ECDIS上設置航跡點,通過ECDIS接收到的艏向、船位、船速、風速風向等信號,得出目前航跡和預設航跡之間的偏差,在ECDIS內部進行計算,然后由ECDIS向自動舵(即艏向控制系統)發出調整艏向的信號,控制船舶在各航跡點之間的自動航行。可以看出,TCS功能可以有效減輕船員負擔,不用安排船員持續控制自動舵,實現了自動調整航向保證航跡的功能,有效提高船舶航行的自動化程度。
國際海事組織下屬的海上安全委員會(海安會)第69界會議通過了決議MSC.74(69),其中附件2是航跡控制系統性能標準建議案,明確了航跡控制系統(TCS)的具體要達到的性能標準。與之配套的,IEC頒布了IEC 62065:2002航跡控制系統的檢驗標準。
2 具體分類及特點
2.1 具體分類
在TCS檢驗標準中,對航跡控制系統分為三類:Category A、Category B、Category C。
1)Category A。僅實現兩個航跡點間及多個處于同一條直線上的航跡點之間的航跡導航,簡言之就是只實現直線上的導航,理論航線就是一條直線,不存在拐點,在航線上會對船舶偏移預計航線距離進行監測,如超出,會發出警報,如需轉向,必須切換到手動操舵或HCS,具體見圖1。
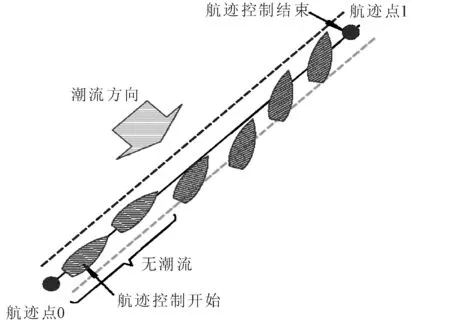
圖1 TCS Category A航跡示意
2)Category B。在完全滿足Category A的基礎上,可以實現多個航跡點之間折線航線的半自動導航,但在拐點處的拐彎需要人工輔助,且拐彎僅基于預設好的拐彎半徑或轉向速率,而不考慮船位、船速、風速、艏向等因素的影響,見圖2。
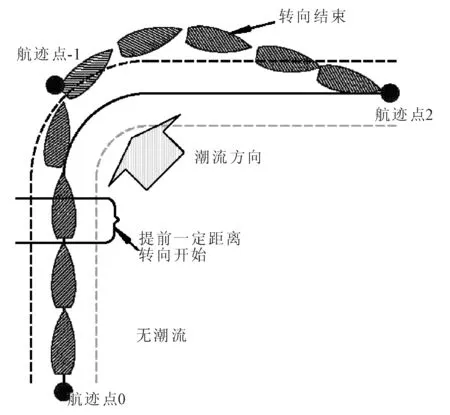
圖2 TCS Category B航跡示意
3)Category C。 在完全滿足Category A的基礎上,可以實現多個航跡點之間折線航線的全自動導航,在拐點處的拐彎全自動完成,不需要人工輔助,系統會通過對各輸入參數(如船位、船速、風速、艏向等)的計算,自動調整舵角,實現平滑拐彎,全航線對船舶偏移預計航線距離進行監測,如超出,會發出警報,見圖3。
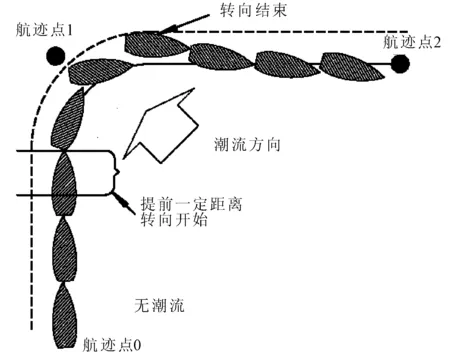
圖3 TCS Category C航跡示意
3 常用廠家配置情況
具體配置哪種Category,需要ECDIS及HCS(自動舵)廠家聯合研制、開發、申請、取證。從常用的廠家配置來看(見表1),目前主流廠家一般按照Category C來配置;也有一些廠家按照Category B來配置;對Category A,由于局限性太強,實際使用意義不大,且Category B、C均已包含Category A的所有功能,所以一般廠家都不考慮僅配置Category A型的TCS。
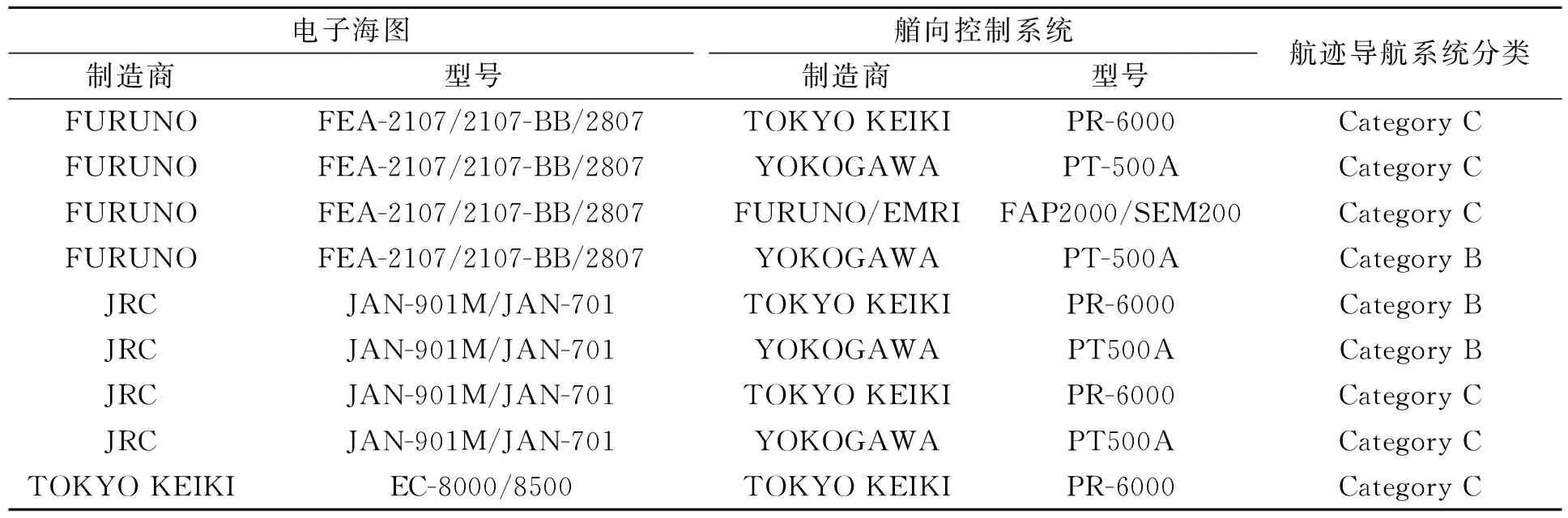
表1 航跡導航系統常用廠家配置
4 實船試驗
由于TCS功能涉及船舶的航行安全,船級社均要求船舶在海試時對TCS功能進行演示報驗。以某船(TCS CATEGORY C,船級NK,ECDIS廠家JRC,HCS廠家TOKYO KEIKI)為例,介紹主要的驗證要點。
1)預設航跡,見圖4。
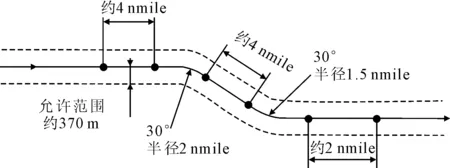
圖4 海試試驗預設航跡
2)在第一段轉向區間(first wheel-over line)驗證。
①在船舶開始轉向至少1 min前,ECDIS發出“early course change indication”報警。
②在開始轉向時,ECDIS 發出“actual course change alarm”報警。
3)在第二段轉向區間(second wheel-over line)驗證。
在開始轉向接到ECDIS 發出“actual course change alarm”報警后,如果30 s內不進行確認操作,確認一下設置在船長房間的“back-up naviga tor alarm”報警是否發出。
4)確認在每個轉向區間內船舶偏離理論航線距離最大的點和理論航線的垂線間距,即最大偏航距離(maximum cross track distance)。
5)在第二段轉向區間后,切斷送至ECDIS的GPS信號,確認TCS系統是否自動切換至HCS系統,同時確認船舶是否按之前HCS系統設定的艏向保持航行。
6)結果記入表2。
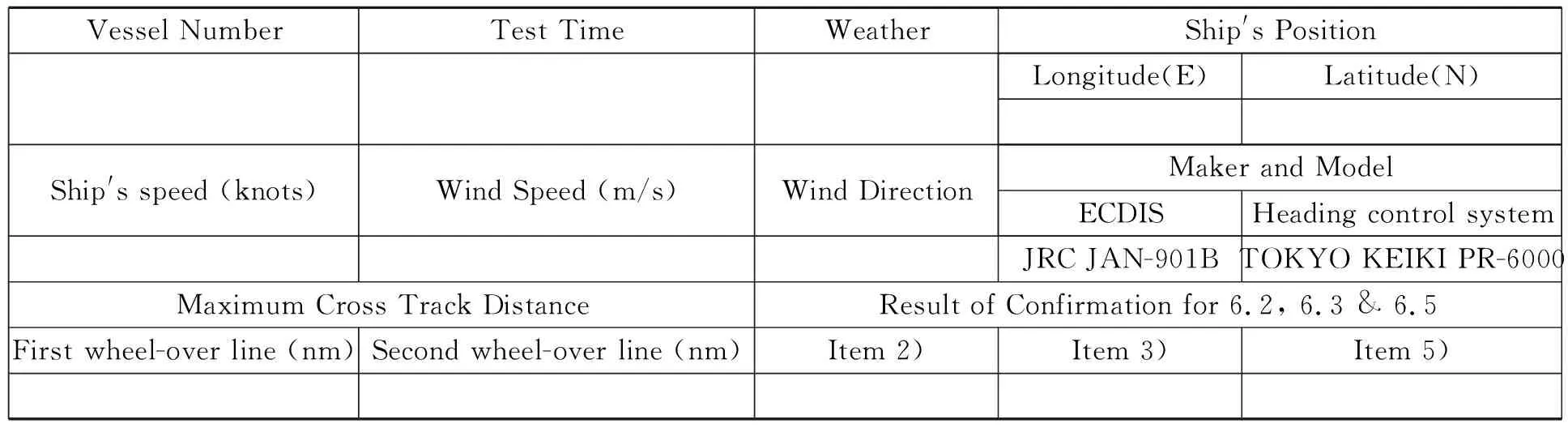
表2 航跡導航試驗記錄
5 結束語
國際海事組織下屬的海上安全委員會(海安會)第86界會議通過了MSC.282(86)決議,對SOLAS進行了修正。修正后的SOLAS第5章第19條2.10要求,從2012年7月1日開始(不同類型、總噸的船舶要求的時間不同),各種類型的新船均要求安裝ECDIS,對舊船也有追溯安裝ECDIS的要求。從該要求來看,安裝ECDIS也被業界公認,今后船舶營運也會越來越多地依賴電子海圖這類電子信息,電子化、自動化程度要求會越來越高。而TCS的必要前提就是船上必須配置ECDIS和HCS,現在兩者都已強制安裝了,也就是說船上要實現TCS功能的基礎已完備,預計今后會有越來越多的船東要求配置TCS,而且IMO也很可能強制要求配置TCS,TCS的配備將是大勢所趨。而對于TCS的三種分類,考慮自動化程度及便利性,應該按照CATEGORY C來配置。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國科技論壇(2017年7期)2017-07-25 08:49:53
中國船檢(2017年3期)2017-05-18 11:33:09
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
